Globalni navigacioni sistemi (14377). Izvještaj o globalnim satelitskim navigacijskim sustavima
Globalni navigacioni satelitski sistem (GLONASS, engleski GLONASS) je ruski satelitski navigacioni sistem dizajniran da odredi lokaciju, brzinu i tačno vreme neograničenog broja kopnenih, morskih, vazdušnih i svemirskih korisnika.
Poticaj za početak praktičnog rada u oblasti satelitske navigacije bio je uspješno lansiranje prvog SSSR-a u SSSR-u u oktobru 1957. godine. Krajem šezdesetih godina prošlog veka u Sovjetskom Savezu je stvoren satelitski radio-navigacioni sistem Cicada.
Uspješno funkcioniranje satelitskih navigacijskih sustava niskih orbita od strane pomorskih potrošača privuklo je veliku pozornost na satelitsku navigaciju. Postojala je potreba za stvaranjem univerzalnog navigacijskog sistema koji zadovoljava zahtjeve velikog broja potencijalnih potrošača.
Godine 1976. Vlada SSSR-a je izdala uredbu o njenom razvoju.
Na osnovu multilateralnih istraživanja domaćih stručnjaka, izabrana je orbitalna konstelacija od 24 satelita smještena u srednje-visinskim kružnim orbitama nominalne visine od 19.100 kilometara.
Testovi letenja domaćeg navigacionog sistema visoke orbite, nazvanog GLONASS, lansirani su 12. oktobra 1982. godine sa lansiranjem prvog Glonass svemirskog broda (Cosmos-1413). Sistem je zvanično pušten u rad 24. septembra 1993. godine u interesu Ministarstva odbrane Ruske Federacije sa orbitalnom konstelacijom ograničenog broja od 12 satelita. U decembru 1995. godine orbitalna grupacija je raspoređena u redovno osoblje (24 satelita), što je neophodno za potpuno pokrivanje cijelog svijeta.
Smanjenje finansiranja za svemirsku industriju devedesetih godina dovelo je do degradacije GLONASS orbitalne grupe. Do 2002. godine, imala je samo sedam letilica, koje nisu mogle obezbijediti teritoriju Rusije navigacijskim signalima sistema GLONASS, barem uz umjerenu dostupnost. Tačnost je inferiorna u odnosu na američki GPS navigacioni sistem za više od reda veličine.
Kako bi se sistem sačuvao i razvio, predsjednik i Vlada Ruske Federacije odobrili su brojne dokumente o politikama, od kojih je glavni cilj bio federalni ciljni program Global Navigation System za period 2002-2012.
Kao rezultat njegove implementacije, orbitalna grupacija je u potpunosti obnovljena. Od 2012. godine, sistem se razvija u okviru novog federalnog ciljnog programa "Održavanje, razvoj i upotreba sistema GLONASS za period 2012-2020" kako bi se osigurala efikasnost rješavanja zadataka koordinatno-vremenske i navigacijske podrške u interesu odbrane, sigurnosti i razvoja društveno-ekonomske sfere zemlje u bliskoj budućnosti. i daleku perspektivu.
Sistem GLONASS se sastoji od podsistema svemirske letelice, podsistema za nadgledanje i kontrolu i opreme za navigaciju potrošača.
Osnova sistema GLONASS su 24 satelita koji se kreću u tri orbitalne ravni od osam vozila u svakoj ravnini, nagnutoj prema ekvatoru pod uglom od 64,8 °, sa orbitnom visinom od 19,100 kilometara i orbitalnim periodom od 11 sati i 15 minuta 44 sekunde. Odabrana struktura orbitalnog grupiranja osigurava kretanje svemirske letjelice duž jedne rute na površini Zemlje sa njenom ponovljivošću nakon osam dana. Takve karakteristike osiguravaju visoku stabilnost orbitalnog grupiranja GLONASS sistema, što praktično omogućava da se bez korekcije orbita letilice tokom cijelog perioda njihovog aktivnog postojanja.
Od 10. oktobra 2017. godine, orbitalna grupa GLONASS-a imala je 25 letilica, od kojih su 23 korišćena za predviđenu namenu.
Prostorni sateliti za GLONASS bili su (sada - Informacioni satelitski sistemi AD pod nazivom po akademiku MF Reshetnevu) u gradu Krasnojarsk-26 (Železnogorsk).
Svemirski brod Glonass bio je u pogonu, sa trogodišnjim aktivnim garantnim vijekom. Trenutno, osnova orbitalne konstelacije su sateliti modifikovane Glonass-M serije, od kojih je prva pokrenuta u decembru 2003. godine. Oni se razlikuju od satelita prve generacije sa garantnim periodom aktivnog postojanja (sedam godina) i upotrebom uvezenih komponenti. Planira se zamjena Glonass-M novom generacijom Glonass-K svemirskih letjelica s vijekom trajanja do 10 godina. Prvi svemirski brod ove vrste lansiran je u orbitu 2011. godine, a drugi - u 2014. godini.
Trenutno se na AD „ISS“ sprovodi i razvoj poboljšanih navigacionih satelita, Glonass-K druge faze.
Podsistem za nadzor i kontrolu (PKU) sastoji se od Centra za kontrolu sistema GLONASS i mreže stanica za mjerenje, kontrolu i praćenje koje se distribuiraju širom Rusije. Zadaci PKU uključuju praćenje ispravnog funkcionisanja letilice, kontinuirano usavršavanje parametara orbita i izdavanje satelita vremenskih programa, komandnih komandi i navigacijskih informacija.
Potrošačku navigacijsku opremu čine navigacijski prijemnici i uređaji za obradu koji su dizajnirani za primanje navigacijskih signala iz GLONASS satelita i izračunavaju vlastite koordinate, brzinu i vrijeme. GLONASS navigacijska oprema za potrošače vrši mjerenja do četiri GLONASS satelita, kao i primanje i obradu navigacijskih poruka. Navigacijska poruka opisuje položaj satelita u prostoru i vremenu. Kao rezultat obrade primljenih mjerenja i primljenih navigacijskih poruka, određuju se tri koordinate potrošača, tri komponente vektorske brzine njegovog kretanja, kao i "vezivanje" vremenske skale potrošača za mjerilo Državnog standarda koordiniranog univerzalnog vremena UTC (SU).
Sistem GLONASS omogućava kontinuiranu globalnu navigaciju svih tipova potrošača sa različitim nivoima zahtjeva za kvalitetom za navigacijsku podršku korištenjem standardnih (L1) i visoko točnih (L2) signala s vjerojatnošću od 0,95 sa 18 satelita i 0,997 sa 24 satelita u konstelaciji. To se odnosi na svemirsku tehnologiju dvostruke namjene.
Trenutno, državna korporacija "Roscosmos" i ministarstva i odeljenja Rusije su uključeni u razvoj projekta GLONASS: Ministarstvo odbrane, Ministarstvo unutrašnjih poslova, Rostechnadzor, Ministarstvo saobraćaja, Federalna registraciona služba, Ministarstvo industrije i trgovine, Rosstandart, Federalna agencija za naučne organizacije (FANO).
U leto 2017. godine, šef Savezne agencije za tehničku regulaciju i metrologiju (Rosstandart), Alexey Abramov, ruski naučnici rade na povećanju tačnosti GLONASS navigatora na nekoliko centimetara. Prema njegovim riječima, dok se ne dostigne domet metra (pod povoljnim uvjetima, moguće je odrediti lokaciju objekta s točnošću od 3-5 metara).
U septembru 2017., zamjenik premijera Dmitrij Rogozin, ruski sistem GLONASS je dvostruko inferiorniji od američkog GPS-a. Na sastanku komisije vojno-industrijskog kompleksa, predsednik Vladimir Putin postavio je zadatak da poveća efikasnost GPS-a i GLONASS-a i do 2020. postigne konkurentne pokazatelje. Prema Rogozinu, to se može postići zahvaljujući lansiranju novih uređaja.
U skladu sa dekretom Predsjednika Ruske Federacije, pristup civilnim navigacijskim signalima sistema GLONASS je besplatan i bez ograničenja dostupan i ruskim i stranim potrošačima.
Od 1996. godine, na prijedlog ruske vlade, GLONASS je korišten od strane Međunarodne pomorske organizacije i Međunarodne organizacije za civilno zrakoplovstvo zajedno sa američkim GPS-om.
Savremeni načini satelitske navigacije već se široko koriste u različitim oblastima društveno-ekonomske sfere i omogućavaju plovidbu kopnenim, vazdušnim, morskim, riječnim i svemirskim vozilima, upravljanje saobraćajem na svim vrstama transporta, praćenje vrijednih i opasnih roba, praćenje ribolova u teritorijalnim vodama. operacije traganja i spašavanja, monitoring životne sredine; geodetsko snimanje i određivanje lokacije geografskih objekata sa centimetarskom tačnošću pri polaganju naftovoda i gasovoda, dalekovoda, u izgradnji; sinhronizacija u komunikacionim sistemima, telekomunikacijama i elektroenergetici; rješavanje osnovnih geofizičkih problema; lična navigacija pojedinačnih potrošača.
Satelitska navigacija se već koristi u poljoprivredi, gdje se koristi za automatsku obradu zemljišta kombinacijom, te u rudarskoj industriji. Raspon primjene tehnologije satelitske navigacije stalno se širi.
Materijal se zasniva na informacijama iz RIA vijesti i javnim izvorima.
Danas u svijetu postoji nekoliko navigacijskih sustava koji koriste umjetne satelite Zemlje. Ali istinski globalni servis za pozicioniranje na skoro svakom mestu na našoj planeti obavljaju samo dva: ruski GLONASS i američki GPS.
Globalni GPS sistem pozicioniranja
Američki GPS sistem za pozicioniranje po funkcionalnosti je sličan ruskom sistemu GLONASS. Njegova glavna svrha je da precizno odredi koordinate potrošača, komponente vektora brzine i referencu na vremensku skalu sistema.
Slično domaćem, GPS sistem je razvijen za američko Ministarstvo odbrane i pod njegovom je kontrolom. Kao i sistem GLONASS, GPS se sastoji od svemirskog segmenta, zemaljskog komandno-mjernog kompleksa i potrošačkog segmenta.
Satelitski navigacijski sustav Galileo
Tokom narednih godina, Evropska unija (EU) i Evropska svemirska agencija (ESA) planiraju da puste u rad novi evropski globalni satelitski navigacioni sistem Galileo (Galileo). Postojanje drugog potpuno operativnog GNSS satelitskog sistema obećava značajne koristi za civilne potrošače širom svijeta. Uspješno pokretanje projekta Galileo će udvostručiti broj radnih navigacijskih satelita dostupnih korisnicima. Ovakvo povećanje broja satelita će imati koristi ne samo kada se radi offline, već će se poboljšati i kvaliteta određivanja koordinata i sposobnost GPS opreme da riješi nejasnoće u fazi nosioca za nadzirani satelitski signal.
Komparativne karakteristike
Indijski satelitski regionalni navigacijski sustav
Vlada Indije je 9. maja 2006. odobrila projekat za implementaciju indijskog satelitskog regionalnog navigacijskog sistema (IRNSS) sa budžetom od 14,2 milijarde rupija u narednih 6-7 godina. Satelitska konstelacija IRNSS sastojat će se od sedam satelita u geosinkronim orbitama. Svih sedam satelita će imati stalnu radio vidljivost sa indijskim kontrolnim stanicama.
Zemaljski segment IRNSS-a će imati stanicu za praćenje, stanicu, rezervacije, nadzornu i kontrolnu stanicu na brodu. Državna kompanija ISRO odgovorna je za raspoređivanje IRNSS-a, koji će u potpunosti biti pod kontrolom indijske vlade. Navigacijski prijemnici koji će primati IRNSS signale će također biti razvijeni i proizvedeni od strane indijskih kompanija.
Kompas navigacijskog satelitskog sustava u Kini
Kina, zemlja s najbržim rastom na svijetu, također je počela graditi vlastiti satelitski navigacijski sustav Compass.
Svemirski segment Compass satelitskog navigacionog sistema će biti formiran od 5 satelita u Geostacionarnoj orbiti (GSO) i 30 satelita u prosječnoj orbiti Zemlje.
Biće pružene dvije vrste usluga. Za opštu upotrebu, prenosiće se signal, čija obrada će omogućiti postizanje tačnosti pozicioniranja od 10 m, brzine od 0,2 m / s i određivanje trenutnog vremena sa tačnošću od 50 ns.
Ograničen broj korisnika moći će mjeriti sa većom preciznošću.
Kina želi da sarađuje sa drugim zemljama u razvoju satelitske navigacije kako bi kompasu omogućio interakciju sa drugim globalnim navigacionim sistemima.
Japanski navigacioni sistem (QZSS)
U početku, japanski QZSS bio je koncipiran 2002. godine kao komercijalni sistem sa setom usluga za mobilnu komunikaciju, emitovanje i široku upotrebu za navigaciju u Japanu i susjednim područjima jugoistočne Azije. Prvo lansiranje satelita za QZSS bilo je zakazano za 2008. U martu 2006. japanska vlada je objavila da prvi satelit neće biti namijenjen komercijalnoj upotrebi i da će biti pušten u rad isključivo iz budžetskih sredstava za izradu odluka koje se donose kako bi se osiguralo rješavanje problema plovidbe. Tek nakon uspješnog završetka ispitivanja prvog satelita započet će druga faza, a sljedeći sateliti će u potpunosti osigurati prethodno planirani opseg usluga.
Alexey Mikhailov, rukovodilac sektora, Savezna državna ustanova Naučno-istraživački centar "Okhrana"
Nedavno se sve više koristi globalni navigacijski sistem za određivanje koordinata stacionarnih i pokretnih objekata zaštite.
Ne ostanite po strani od korišćenja savremenih tehnoloških dostignuća i privatnog obezbeđenja. U odeljenjima bezbednosti, sistemi za navigaciju kao što su Almaz (Kodos-B LLC, Moskva), Argo-Stražh (Navigation Systems CJSC, Omsk), Arkan CJSC koriste se dugo vremena. BaltAvtoPoisk, Sankt Peterburg, Inflow GPS LLC (Sigurnosni biro Sokrat, Irkutsk).
Ovi i mnogi drugi navigacioni sistemi bazirani su na GPS prijemniku (Arkanov navigacioni sistem takođe može da koristi tradicionalni metod za pronalaženje pravca za određivanje lokacije objekta), tako da zaposleni koji koriste ove sisteme u svom radu moraju imati opšte razumevanje principa rada GPS-a i da jasno znaju to se može tražiti od takvih sistema, a što od njih ne treba očekivati.
Razumevanje principa navigacionih sistema i njihovo pravilno funkcionisanje je ključ za uspešan rad.
Iza misteriozne GPS skraćenice je Globalni sistem pozicioniranja - globalni sistem pozicioniranja. U početku, projekt je nastao i korišćen od strane američke vojske kao sredstvo za određivanje koordinata u realnom vremenu bilo gdje u svijetu i nazvan je Navstar (navigacijski sustav s vremenskim rasporedom), dok se GPS skraćenica pojavila kasnije.
Princip rada GPS-a
Princip triangulacije je osnova za rad bilo kojeg navigacijskog sustava, tj. određivanje lokacije objekta sa udaljenosti do tri poznate tačke u prostoru.
Radi jednostavnosti, pretpostavićemo da imamo tri fiksna satelita, a njihove koordinate poznajemo sa velikom tačnošću, a zatim, analizirajući vreme širenja radio signala sinhrono emitovanih iz njih, odredićemo naše koordinate u trodimenzionalnom prostoru. Rastojanje do cilja, analizirajući vrijeme dolaska reflektovanog radio signala iz objekta, određeno je u radaru početkom dvadesetog stoljeća, isti princip se koristi u satelitskim navigacijskim sustavima.
Nažalost, tu je iscrpljena sličnost između tradicionalnih i satelitskih sistema lociranja objekata. U stvarnom životu, sateliti se kreću velikom brzinom u svojim orbitama na nadmorskoj visini od oko 20 hiljada km. Dakle, na Zemlji ne znamo vreme sinhronog zračenja sa satelita i njihove koordinate.
Da bi rešili ove kontradikcije, programeri su odlučili da instaliraju atomski sat na satelitu. Izuzetno su precizni i skupi. Oni koštaju oko 100.000 dolara, a svaki satelit ima 4, tako da možete garantovati pouzdan rad. Tako je rešen problem sinhronizacije (problem istovremene emisije radio signala) sa satelita.
Pitanje određivanja lokacije satelita u orbiti rješava se prenošenjem podataka sa svojih stanica za praćenje terena na njihovim orbitama u kontrolni centar, gdje se izračunavaju specificirani elementi trajektorija. Ovi parametri se unose u almanah i prenose na satelite, a oni, pak, šalju ove informacije svim operativnim prijemnicima. Za kontrolu orbita i koordinata satelita, postoje četiri stanice za praćenje terena,
komunikacioni sistemi i kontrolni centar, kontrolisani od strane Ministarstva odbrane SAD. Uzimajući u obzir činjenicu da se let na nadmorskoj visini od 20 km odvija u bezvazdušnom prostoru, on se s velikom preciznošću opisuje matematičkim zavisnostima. Uzimajući u obzir sve navedeno, riješen je problem određivanja lokacije satelita u orbiti.
Ostaje da se riješi problem određivanja točnog vremena u GPS prijemniku zemaljskog prijemnika. Činjenica je da naš sat u prijemniku GPS signala ima veliku vremensku grešku merenja u odnosu na brzinu širenja radio signala u prostoru.
Da bi se riješio ovaj problem, koristi se signal sa četvrtog satelita. Razmislite o pirinču. 1.
Ako je udaljenost A do jednog satelita poznata, onda se ne mogu odrediti koordinate prijemnika (može se nalaziti u bilo kojoj točki kugle radijusa A opisane oko satelita). Neka je poznata udaljenost B prijemnika od drugog satelita. U ovom slučaju definicija koordinata također nije moguća - objekt je negdje na krugu (prikazan je plavom bojom na slici 1), što je sjecište dvije sfere. Udaljenost C do trećeg satelita smanjuje nesigurnost u koordinatama na dvije točke (označene s dvije podebljane plave točkice na slici 1). To je dovoljno da se nedvosmisleno odrede koordinate - činjenica je da se od dve moguće tačke prijemne lokacije samo jedna nalazi na površini Zemlje (ili u njenoj neposrednoj blizini), a druga, lažna, ispada da je ili duboko unutar Zemlje ili veoma visoko iznad nje. po površini. Dakle, teoretski, za trodimenzionalnu navigaciju, dovoljno je znati udaljenost od prijemnika do tri satelita, međutim, potrebno je ispraviti vrijeme u GPS prijemniku, dakle, nakon što je primio signal od četiri (ili više) satelita (podaci kruga nisu prikazani na slici da ne bi zakrčili sliku) prijemnik traži tačku preseka odgovarajućih sfera. Ako ne postoji takva tačka, procesor prijemnika počinje da podešava sat metodom uzastopnih aproksimacija sve dok ne dostigne presek svih sfera u jednoj tački.
Najvažnije:
1. Za određivanje koordinata objekta GPS mora "vidjeti" najmanje četiri satelita.
2. Što je više satelita prijemnik “vidio”, točnije određuje svoje koordinate.
Tačnost određivanja koordinata u GPS sistemu
Nesporna prednost GPS-a je visoka preciznost određivanja koordinata bez obzira na lokaciju objekta za nadgledanje na terenu. Činjenica je da je u cilju obezbeđivanja globalne akcije 24 satelita konstantno u orbiti, koji su u orbiti sa različitim deklinacijama i teoretski obezbeđuju njihovu vidljivost bilo gde u svetu. Da bi se rešio ovaj problem, dovoljno je da u orbiti ima 18 satelita, međutim, odlučeno je da se koristi 24 - da se poveća tačnost određivanja koordinata samih satelita.
Tačnost određivanja koordinata u GPS sistemu ovisi o mnogim parametrima, ovisno o fizičkim parametrima (posebno o omjeru signal-šum u prijemnom signalu, vidi dolje) i položaju vlasnika sustava (SAD). U GPS sistemu postoji način selektivnog pristupa (SA - selektivna dostupnost) - greške umetno uvedene u satelitske signale za netačne civilne GPS prijemnike koje su Sjedinjene Države izvele tokom operacije Pustinjska oluja u Iraku. Na sl. 2 prikazuje grafikon za određivanje greške u režimu selektivne greške i bez nje.
Tačnost određivanja koordinata takođe zavisi od:
- Iz stanja atmosfere i jonosfere, budući da je brzina širenja elektromagnetskog polja konstantna samo u vakuumu, a bilo koji medij za širenje vrši promjenu brzine širenja radio signala;
- Od "višestaznog" širenja radio signala;
- Od relativnog položaja satelita na nebu, tzv. "GDOP" (geometrijski faktor koji smanjuje tačnost);
- Od matematičke obrade na satelitu i još mnogo toga.
S obzirom na gore navedeno, GPS prijemnik može potpuno prestati da određuje svoju lokaciju u blizini obližnjih visokih zgrada (takozvani gradski bunari), u gustoj šumi smreke, i naravno, u glavnoj zgradi ili metalnoj garaži ili hangaru.
Neke privatne firme za zaštitu tvrde da imaju mogućnost zaštite života i zdravlja građana od napada na GPS prijemnik + mobilni telefon, ali ovi korisnici moraju da zapamte da mogu da pronađu osobu koja koristi GPS unutar zgrade, na ulazu, u vozilu (tj. gde se napadi najčešće dešavaju) je nemoguće.
Prava tačnost određivanja koordinata u GPS sistemu u Rusiji je 10-25 m. Naravno, ta preciznost nije maksimalno ostvariva za GPS sistem, koristeći diferencijalne metode za određivanje tačnosti može biti i do 10 cm ili manje, ali moramo govoriti o tim sistemima. koji se zapravo koriste u odjelima sigurnosti.
Najvažnije:
- GPS navigacione sisteme karakteriše visoka preciznost u određivanju koordinata (reda 10-25 m), bez obzira na udaljenost objekta, zaštićenu od centralne stanice za praćenje i vremena kretanja objekta.
- Tačnost određivanja koordinata može se smanjiti od strane vlasnika sistema (SAD) do potpune nemogućnosti određivanja koordinata.
- GPS prijemnik može potpuno zaustaviti određivanje svoje lokacije u blizini obližnjih visokih zgrada (takozvani gradski bunari), u gustoj šumi smreke, i naravno unutar kapitalne strukture, metalnoj garaži ili hangaru.
Imunitet GPS sistema
Interferencijski imunitet GPS-sistema, u smislu njihove upotrebe u sigurnosnim sistemima. Činjenica je da je snaga satelitskog predajnika ograničena na 50 vati za L1 opseg emisije i 8 vati za L2 opseg, a visina suspenzije satelita je oko 20 hiljada km.
Prema tome, nije teško shvatiti koliko mala gustina fluksa elektromagnetnog zračenja dolazi do GPS antene. Jednostavan geometrijski proračun pokazuje da sa dijagramom antene predajnika širine 2ê i visine satelita iznad zemljine površine od 20.000 km
protok elektromagnetnog zračenja pada na krug promjera 700 km. Ova situacija malo štedi gigaherc opseg zračenja (sa povećanjem radne frekvencije, nivo buke u medijima pada), ali istovremeno se nameće ograničenje na elektromagnetski val oko prepreke. Širenje elektromagnetnog talasa u ovom opsegu je gotovo jednostavno.
Sledeća tačka, koja se često previdi: GPS prijemnik određuje svoje koordinate na svojoj lokaciji, a informacije o koordinatama se moraju preneti u PTO. Po pravilu, u tu svrhu koriste mobilne mreže ili VHF radio stanice sa svim posljedicama koje iz toga proizlaze.
Ćelijske mreže se lako suzbijaju, korisnik je u potpunosti zavisan od kvaliteta usluga koje pruža mobilna kompanija, koja uglavnom nije odgovorna za brzinu dostavljanja obaveštenja, pouzdanost komunikacije i dugoročnu posvećenost klijentu. Međutim, velika površina pokrivenosti, mala cijena opreme (ali ne i cijena redovnog prijenosa koordinata objekta) je atraktivna osobina takvog rješenja.
VHF radio kanal je pouzdaniji komunikacioni kanal u odnosu na celularne mreže, ne zahtijeva posrednik za prijenos koordinata između objekta zaštite i PTO, već ga karakteriše znatno manja pokrivenost i potreba za vlastitim frekvencijskim resursom, što nije uvijek lako implementirati. U ovom slučaju, nema potrebe za plaćanjem razmjene prometa između objekta zaštite i stanice za praćenje.
Najvažnije:
Korisnik bi trebao jasno predstaviti sve zamke vezane za korištenje GPS-monitoring sistema i kompetentno sastaviti ugovore za usluge koje se pružaju klijentu, koje treba uzeti u obzir višu silu.
GPS ili "GLONASS"
Ako je GPS globalni pozicioni sistem napravljen u SAD-u, onda je GLONASS (GLOBAL Navigacioni satelitski sistem) napravljen u SSSR-u - Rusija. U blagoslovljenim vremenima, SSSR je imao potpuno opremljen satelitski navigacioni sistem, po karakteristikama identičan američkom sistemu pozicioniranja, koji se uglavnom koristio za vojne svrhe.
Tada, u godinama perestrojke, većina GLONASS satelita "je pala" ili je porasla, au najgorim godinama umesto 24 satelita u orbiti bilo je samo 7 satelita. Za 2006. godinu, 16 satelita je u orbiti, od kojih samo 9 radi ili će raditi u bliskoj budućnosti (budući da su neki od satelita u fazi potpunog razvoja svog resursa).
Na početku razvoja satelitske navigacije u Rusiji za civilnu upotrebu, uvedeni su navigacioni prijemnici koji su omogućili prijem GPS i GLONASS signala, što je nesumnjivo tačno, jer se broj satelita koji su potencijalno dostupni za prijem dupliraju. To vam, zauzvrat, omogućava da povećate verovatnoću određivanja lokacije i tačnosti koordinata.
Međutim, zbog stvarne smrti sistema GLONASS krajem devedesetih godina, trenutno su na slobodnom tržištu Rusije prisutni samo GPS prijemnici. Ali nije sve tako loše kao što se čini.
Ruski predsednik Vladimir Putin identifikovao je kao prioritetni nacionalni program za oživljavanje navigacionog sistema GLONASS, au 2007. godini planirano je da do 2010. godine u orbiti bude ukupno 18 radnih satelita i 24 satelita, što će omogućiti eliminisanje zavisnosti od tako važnog pitanja kao što je globalno određivanje koordinata ( prvenstveno za civilnu i odjelnu prijavu *), iz volje Sjedinjenih Država.
(* Čitalac može imati utisak da u ovom trenutku ruska vojska ne može odrediti njihove koordinate. To nije sasvim slučaj. Vojna plovidba uvijek koristi rezervne sustave, kao što su navigacijski sustavi koji se temelje na upotrebi radio signala, mehaničkih žiroskopa, prstenastih žiroskopa, registrovanje promena u Zemljinom magnetnom polju, ili drugih principa nepoznatih autoru, međutim, svi ovi sistemi se odlikuju visokom cenom, mnogo nižom tačnošću u određivanju koordinata (možda za zatvorskim sistemima prsten laser giros based) i tendencija da se zavisnost točnost koordinata objekta iz vremena (efekat akumulacije greška).
Na osnovu gorenavedenog, nivo navigacije ovim sredstvima je ograničen nivoom aviona (aviona, helikoptera), a korišćenje satelitskog navigacionog sistema omogućava vam da pratite položaj sa relativno malim materijalnim troškovima velikog broja objekata, sve do položaja pojedinog vojnika za više borbenih dejstava, koji se ostvaruje u SAD. (stvaranje takozvanih "kompjuterskih" odjela, u SAD su već kreirane dvije takve podjele).
Najvažnije:
- Trenutno, GPS prijemnici dominiraju na domaćem tržištu.
- Razvojni sistem navigacije, kao i korisnik, treba da razmisli o razmeni GPS i GLONASS sistema u bliskoj budućnosti.
- Kako se stvara potpuno razvijena orbitalna konstelacija, potrebno je preći na GLONASS sistem (iako će to zaista biti moguće učiniti po cijeni GLONASS prijemnika koji je jednak ili manji od GPS sistema, s približno jednakim tehničkim karakteristikama prijemnika oba sistema).
Nije šteta trošiti novac na stabilizacioni fond Rusije kako bi se stvorio istinski konkurentan domaći globalni navigacioni sistem, iako to nije tema ovog članka.
Zaključci:
- Globalni navigacioni sistem je jedno od najnovijih dostignuća moderne inženjerske misli i treba ga aktivno koristiti u praksi PSB-a.
- Globalni navigacioni sistem nije lijek za sve bolesti.
- Ekonomski neopravdana, tehnički neopravdana upotreba bez uzimanja u obzir posebnosti navigacionog sistema može dovesti do potpune diskreditacije ovog pravca u očima potrošača.
Članak je pripremljen zajedno sa urednicima časopisa "Zaštita".
Tokom sunčevih baklji.
Tokom geomagnetskih poremećaja.
Objasnite šta je GNSS.
Recite o razvoju navigacije: "od kompasa do satelitskih navigacijskih sistema (SNA)."
Objasniti opće principe satelitske navigacije (SN).
Opisati trenutni SNA-GPS i GLONASSnjihove komponente (segmenti prostora i zemlje) i aplikacije.
Recite koje se SNS pripremaju za pokretanje ili su u razvoju (GALLILEO, COMPASS).
Objasnite SNS neuspjehe:
Recite o faktorima koji utiču na pogoršanje tačnosti pozicioniranja.
GNSS.
Satelitska navigacija: koncept, sistem, akcija.
GLOBAL Navigacioni satelitski sistem (GLONASS) - sovjetski i ruskirazvijena na zahtjev. Jedan od dva trenutno funkcionirajuća globalna satelitska navigacijska sustava. Osnova sistema treba da bude 24 satelita koji se kreću iznad površine u tri orbitalne ravni sa nagibom orbitalnih ravni od 64,8 ° i nadmorskom visinom od 19,100 km. Princip merenja je sličan američkom navigacionom sistemu.. Trenutno se radi na razvoju projekta GLONASS (Roscosmos) i OJSC "Russian"
Sa  koliko čovječanstvo postoji, i toliko pitanje kako odrediti njegovu lokaciju na kopnu i na moru, u šumi ili u gradu. Do danas nema potrebe za navigacijom, kao drevni putnici i navigatori zvijezda ili kompasa. Era otkrića radio valova značajno je pojednostavila zadatak plovidbe i otvorila nove perspektive za čovječanstvo u mnogim područjima života i aktivnosti, a otkrićem mogućnosti osvajanja svemira napravljen je veliki napredak u određivanju koordinata objekta na Zemlji. Umjetni zemaljski sateliti postali su referentne stanice za radio navigaciju, a danas satelitski navigacijski sustavi postali su dostupni ne samo vojnicima ili pomorcima, već i običnim ljudima, pojedincima i tvrtkama za koje je potrebna navigacija.
koliko čovječanstvo postoji, i toliko pitanje kako odrediti njegovu lokaciju na kopnu i na moru, u šumi ili u gradu. Do danas nema potrebe za navigacijom, kao drevni putnici i navigatori zvijezda ili kompasa. Era otkrića radio valova značajno je pojednostavila zadatak plovidbe i otvorila nove perspektive za čovječanstvo u mnogim područjima života i aktivnosti, a otkrićem mogućnosti osvajanja svemira napravljen je veliki napredak u određivanju koordinata objekta na Zemlji. Umjetni zemaljski sateliti postali su referentne stanice za radio navigaciju, a danas satelitski navigacijski sustavi postali su dostupni ne samo vojnicima ili pomorcima, već i običnim ljudima, pojedincima i tvrtkama za koje je potrebna navigacija.
Koncept: Satelitski navigacijski sustav
- integrirani elektronski tehnički sustav koji se sastoji od kombinacije zemaljske i svemirske opreme, namijenjene za određivanje lokacije (geografske koordinate i nadmorske visine), kao i parametara kretanja (brzina i smjer kretanja, itd.) za tlo, vodu i zračne objekte.
Sistem:
Glavni elementi sistema satelitske navigacije:
Orbitalna grupacija
koji se sastoji od nekoliko (od 2 do 30) satelita koji emituju posebne radio signale; Sustav zemaljske kontrole i monitoringa, koji uključuje jedinice za mjerenje trenutne pozicije satelita i prijenos primljenih informacija na njih za podešavanje informacija o orbitama;
Primanje klijentske opreme
("Satelitski navigatori"), koji se koriste za određivanje koordinata;
Opcionalno
:
informacioni radio sistem za prenošenje korekcija korisnicima, što omogućava značajno poboljšanje tačnosti određivanja koordinata.
Akcija: Princip rada satelitskih navigacijskih sistema zasniva se na mjerenju udaljenosti od antene u objektu (čije koordinate treba dobiti) do satelita čija je pozicija poznata s velikom točnošću. Tabela položaja svih satelita naziva se almanah, koju svaki satelitski prijemnik mora imati prije početka mjerenja. Obično prijemnik čuva almanah u memoriji od poslednjeg isključivanja i ako nije zastareo, odmah ga koristi. Svaki satelit prenosi u svom signalu cijeli almanah.
Dakle, poznavajući udaljenosti do nekoliko satelita sistema, koristeći obične geometrijske konstrukcije, na osnovu almanaha, može se izračunati položaj objekta u prostoru. Metoda mjerenja udaljenosti od satelita do antene prijemnika zasniva se na određivanju brzine širenja radiovalova. Da bi se ostvarila mogućnost mjerenja vremena širenja radio signala, svaki satelit navigacijskog sustava emitira točne vremenske signale kao dio svog signala koristeći atomski sat koji je precizno sinkroniziran sa sistemskim vremenom.
Kada je satelitski prijemnik u pogonu, njegov sat se sinhronizuje sa sistemskim vremenom, a nakon daljnjeg prijema signala izračunava se kašnjenje između vremena zračenja koje sadrži sam signal i vrijeme prijema. Pomoću ove informacije navigacioni prijemnik izračunava koordinate antene. Većina navigacijskih prijemnika koristi Doppler efekat za dobivanje informacija o brzini. Dodatno akumulirajući i obrađujući ove podatke u određenom vremenskom periodu, moguće je izračunati parametre kretanja kao što su brzina (struja, maksimum, prosjek), pređena udaljenost, itd. U stvarnosti, sistem je mnogo složeniji.
U nastavku su navedeni neki problemi koji zahtijevaju posebne tehnike za njihovo rješavanje:
Odsustvo atomskih satova u većini navigacionih prijemnika. Ovaj nedostatak se obično eliminiše zahtevom dobijanja informacija od najmanje tri (dvodimenzionalna navigacija na poznatoj visini) ili četiri (3-dimenzionalna navigacija) satelita; (Ako postoji signal od barem jednog satelita, možete odrediti trenutno vrijeme s dobrom preciznošću). Heterogenost gravitacionog polja Zemlje, koji utiče na orbite satelita; Heterogenost atmosfere, zbog koje brzina i smjer širenja radio valova mogu varirati unutar određenih granica; Refleksija signala iz prizemnih objekata, što je posebno uočljivo u gradu; Nemogućnost postavljanja predajnika velike snage na satelite, zbog čega je prijem njihovih signala moguć samo u direktnoj vidljivosti na otvorenom.
Istorijat i perspektive razvoja.
Istorija razvoja satelitskih navigacijskih sistema ima više od 40 godina. Početak razvoja domaćeg satelitskog radio navigacijskog sustava (SRNS), kao što se najčešće smatra, lansiranje 4. listopada 1957. godine u Sovjetskom Savezu prvog umjetnog zemaljskog satelita (AES) u povijesti čovječanstva. Po prvi put, izjave o potrebi da se stvori takav sistem koji zadovoljava potrebe mnogih odjela napravljene su na Naučno-tehničkom vijeću 1946. godine u govorima stručnjaka Lenjingradskog znanstveno-istraživačkog radio-tehničkog instituta. Sredinom 70-ih godina u SSSR-u je stvoren satelitski navigacioni sistem "Cicada", au Sjedinjenim Američkim Državama šezdesetih godina - Transit sistem, koji je kasnije doživio mnoge promjene i tehnološka poboljšanja. Ovi sistemi su razvijeni po nalogu Ministarstva odbrane zemalja i bili su specijalizovani za operativnu globalnu navigaciju zemaljskih pokretnih objekata, ali je tek u decembru 1976. godine usvojena Rezolucija Centralnog komiteta CPSU i Vijeća ministara SSSR-a "O implementaciji jedinstvenog svemirskog navigacijskog sistema". Postojeći satelitski navigacioni sistemi, potrošači nisu bili zadovoljni sa tačnošću rezultata i vremenom potrebnim za određivanje koordinata - bilo je potrebno kreiranje sistema sledeće generacije. Kao rezultat toga, u Sovjetskom Savezu početkom 80-ih godina prošlog stoljeća, izumljen je satelitski navigacijski sistem. Rođeni satelitski navigacioni sistemi nazivaju se GPS - u Sjedinjenim Državama, a GLONASS - u SSSR-u. Kao rezultat toga, prvi američki satelit je lansiran u februaru 1978. godine, a prvi sovjetski satelit kasnije - 12. oktobra 1982. godine. Dana 24. septembra 1993. godine GLONASS je zvanično naručen. Godine 1995. njena konstelacija satelita bila je 24 vozila. Nakon toga, zbog nedovoljnog finansiranja, smanjio se broj radnih satelita. U avgustu 2001. godine usvojen je federalni ciljni program Global Navigation System, prema kojem je planirana potpuna pokrivenost teritorije Rusije? početkom 2008. godine, a sistem bi dostigao globalne razmjere do početka 2010. godine. Da bi se ovaj zadatak ostvario, planirano je da se tokom 2007., 2008. i 2009. napravi šest lansiranja lansirnih vozila i da se 18 satelita stavi u orbitu - tako da bi do kraja 2009. godine grupa trebala ponovo da se sastoji od 24 vozila. Istovremeno, tačnost određivanja lokacije korisnika sistema će dostići 1–5 metara, kao i kod GPS-a. Prema podacima Centralnog istraživačkog instituta za mašinstvo, od danas, orbitalna grupacija sistema GLONASS ima 19 letilica. 14 od njih se koristi za svoju namenu, 3 - u fazi ulaska u sistem (lansirani su od 25.09.2008), 1 - privremeno dovedeni u održavanje, 1 - u fazi povlačenja iz sistema. Prema predviđanjima, do kraja 2008. godine iz sistema će se izvesti još tri nova uređaja.
Dugoročni program razvoja svemirskog navigacijskog sustava implementira se u sljedećim integriranim fazama:
Faza 1
(do 2003. godine). Održavajte GLONASS CNS na minimum q  na nižem nivou, sa lansiranjem Glonass svemirskog broda (sl.), modernizacijom kruga za razmjenu informacija zemaljskog kontrolnog kompleksa, naprednom opremom potrošača sa opremom koja radi na signalima iz dva sistema: GLONASS i GPS. Razvoj i stvaranje satelita "Glonass-M".
na nižem nivou, sa lansiranjem Glonass svemirskog broda (sl.), modernizacijom kruga za razmjenu informacija zemaljskog kontrolnog kompleksa, naprednom opremom potrošača sa opremom koja radi na signalima iz dva sistema: GLONASS i GPS. Razvoj i stvaranje satelita "Glonass-M".
Uh  tapnite 2
(do 2005) Upotreba radne orbitalne konstelacije do 18 jedinica na osnovu Glonass-M satelita (sl.) sa masom od 1.415 kg. i aktivni život od 7 godina, što je mnogo više od prethodnih satelita serije. Prelazak na novi frekventni opseg navigacijskog signala. Ispitivanje tehnologije podrške za vrijeme efemerida korištenjem među-satelitskih mjerenja. Proširenje nomenklature i broj potrošača koji rade na signalima iz GLONASS-a i GPS SPS-a. Razvoj i stvaranje malih masovnih letilica Glonass-K.
tapnite 2
(do 2005) Upotreba radne orbitalne konstelacije do 18 jedinica na osnovu Glonass-M satelita (sl.) sa masom od 1.415 kg. i aktivni život od 7 godina, što je mnogo više od prethodnih satelita serije. Prelazak na novi frekventni opseg navigacijskog signala. Ispitivanje tehnologije podrške za vrijeme efemerida korištenjem među-satelitskih mjerenja. Proširenje nomenklature i broj potrošača koji rade na signalima iz GLONASS-a i GPS SPS-a. Razvoj i stvaranje malih masovnih letilica Glonass-K.
Faza 3
(do 2010). Implementacija standardne orbitalne konstelacije na bazi manjih, naprednijih, nepritisnutih Glonass-K satelita (slika br., Jer se tek razvija) sa znatno dužim aktivnim vijekom trajanja do 10 godina, manje mase od oko 700 kg, što je dvostruko veće manje od "Glonass-M". Proširenje upotrebe inter-satelitske radio veze za rješavanje problema autonomne efemeridne podrške, operativne kontrole i praćenja letjelica, osiguravajući integritet. Kreiranje zemaljske mreže monitoring stanica za GLONASS CLS i funkcionalnih dodataka. Oprema potrošačkog parka NAP koja radi na GLONASS, GPS, Galileo signalima.
Navigacijski sateliti iz ove serije bit će stavljeni u orbitu bilo pojedinačnim lansiranjem od strane Sojuz-2, sa gornjim stupom Fregat, ili sa šest vozila u jednom paketu - od strane Protonovog startnog vozila s Breeze-M gornjom fazom. Osim toga, njihovo lansiranje u orbitu je moguće uz pomoć indijskog GSLV nosača. Tako je 2004. godine u Moskvi potpisan sporazum sa Indijom o lansiranju dva navigaciona satelita u periodu 2006–2008. Glonass-K uređaji kreirani su na bazi progresivnije ne-hermetičke platforme, koja, prema mišljenju stručnjaka, postavlja povećane zahtjeve na opremu i elementnu bazu, koja će morati raditi na otvorenom prostoru. Možda će neki od korišćenih elemenata biti strani, ali budući da je ruski navigacioni sistem, on uglavnom treba da radi na našim elementima, na našim uređajima. Danas se razvija tehnološka mogućnost instalacije navigacijskog modula GLONASS u mobilnim telefonima. Telefoni sa GPS-navigatorom već postoje i široko se koriste širom sveta, uključujući i Rusiju. Već postoji veliki broj GPS / GLONASS prijemnika na tržištu navigacione opreme - napravljeni su posebno za Rusiju i imaju veoma različite svrhe.
Stručnjaci smatraju da su glavni zadaci u tekućem periodu oporavka i razvoja GLONASS-a:
Povećati pouzdanost i povećati vremenski okvir za neprekidni rad Glonass letilice na 20 godina;
Razviti orbitalnu grupu od 6 aviona sa 48 satelita kako bi se osiguralo visoko precizno pozicioniranje na zatvorenom terenu (ovaj program su već usvojile Sjedinjene Države);
Obezbediti elektronsku bezbednost i nezavisnost sistema;
Razmotriti izvodljivost isključivanja sistema za spašavanje Cospas, lokacije nuklearnih eksplozija, među-satelitskih komunikacijskih sistema, koji samo zauzimaju mjesto korisnog tereta, iz sistema „putnika“.
I što je najvažnije - da privuku rad ovih profesionalaca koji su u stanju da pričaju celu istinu o GLONASS-u. GLONASS je prioritet svih svemirskih programa, jer bez njega Rusija ostaje bez zaštite u narednih nekoliko godina. Bez GLONASS-a, asimetrični odgovor na američku proturaketnu odbranu i druge potencijalne prijetnje je u principu nemoguć. Dakle, predsjednik je toliko uporno zahtijevao oživljavanje GLONASS-a što je prije moguće.
Princip rada.
GLONASS sateliti kontinuirano emituju dva tipa navigacijskih signala: standardnu preciznost navigacijskog signala (ST) u L1 pojasu (1,6 GHz) i visoko precizne navigacijske signale (BT) u L1 i L2 pojasima (1,2 GHz). Informacije dobijene od CT signala dostupne su svim potrošačima na trajnoj i globalnoj osnovi i uz korištenje GLONASS prijemnika moguće je odrediti:
* horizontalne koordinate sa tačnošću od 50-70 m (vjerovatnoća 99,7%);
* vertikalne koordinate sa tačnošću od 70 m (verovatnoća 99,7%);
* komponente vektora brzine s točnošću od 15 cm / s (vjerojatnost 99,7%)
* tačno vreme sa tačnošću od 0.7 µs (99.7% verovatnoća).
Ova preciznost se može značajno poboljšati metodom diferencijalne navigacije i / ili dodatnim posebnim mjernim metodama.
VT signal je prvenstveno namenjen potrošačima ruskog Ministarstva odbrane, a njegovo neovlašćeno korišćenje se ne preporučuje. Razmatra se pitanje pružanja VT signala civilnim potrošačima.
Za određivanje prostornih koordinata i tačnog vremena potrebno je primati i obrađivati navigacione signale od najmanje 4 GLONASS satelita. Pri prijemu navigacionih radio signala, GLONASS prijemnik, koristeći poznate radio-inženjerske metode, mjeri udaljenosti do vidljivih satelita i mjeri njihove brzine.
Istovremeno sa merenjima, prijemnik automatski obrađuje vremenske oznake i digitalne informacije sadržane u svakom navigacijskom radio signalu. Digitalne informacije opisuju položaj datog satelita u prostoru i vremenu (efemeride) u odnosu na vremensku skalu jednog sistema i geocentrično pridruženog kartezijanskog koordinatnog sistema. Pored toga, digitalne informacije opisuju položaj drugih satelita sistema (almanah) u obliku keplerskih elemenata njihovih orbita i sadrže neke druge parametre. Rezultati mjerenja i primljene digitalne informacije su početni podaci za rješavanje navigacijskog zadatka određivanja koordinata i parametara kretanja. Problem navigacije se automatski rješava u računalnom uređaju prijemnika, koristeći dobro poznatu metodu najmanjih kvadrata. Kao rezultat rešenja, određuju se tri koordinate lokacije potrošača, brzina njegovog kretanja i vremenska skala potrošača je povezana sa skalom univerzalnog koordinisanog vremena (UTC) visoke preciznosti.
GLONASS danas.
Među operativnim svemirskim letjelicama (SC) trenutno je jedanaest GLONASS-M satelita (jedan je lansiran 2003. godine, dva u 2005. godini, tri u 2006. godini), sa garantnim periodom aktivnog života od 7 godina. Ovi sateliti, za razliku od uređaja prethodne generacije, emituju već dva signala za civilne potrošače, što može značajno poboljšati preciznost pozicioniranja.
U skladu sa uputstvima predsjednika Ruske Federacije, u 2007. godini trebalo bi rasporediti minimum od 18 satelita. Potpuno grupisanje 24 satelita u skladu sa federalnim ciljnim programom Globalni navigacioni sistem trebalo bi da se primeni u 2010. godini.
GLONASS-M sateliti u orbitalnoj konstelaciji će biti barem do 2015. godine. Letna testiranja satelita bez pritiska nove generacije GLONASS-K sa poboljšanim karakteristikama (garantni rok produljen na 10 godina i treća frekvencija L-frekvencija za civilne potrošače) treba da počnu 2009. godine. Ovaj satelit će biti dvostruko lakši od svog prethodnika (oko 700 kg u odnosu na 1415 kg u Glonass-M)
Ubuduće, nakon raspoređivanja orbitalne konstelacije od 24 satelita, biće potrebno da jedna grupa lansira godinu dana dva GLONASS-K satelita na nosaču Sojuza, što će značajno smanjiti operativne troškove.
Ministar odbrane Sergei Ivanov je 29. novembra 2006. godine tokom posete RIRT-u najavio da će sistem GLONASS uskoro biti dostupan za civilnu upotrebu.
Ruski predsjednik Vladimir Putin potpisao je 18. maja 2007. godine dekret prema kojem će pristup ruskom navigacijskom sistemu GLONASS biti besplatan i bez ograničenja kako za ruske tako i za strane potrošače.
GLONASS sateliti će biti lansirani sa kosmodroma u Pleseskuku.
MOSKVA, 9. april - RIA News. Lansiranje GLONASS satelita za navigaciju ubuduće će se odvijati ne iz Bajkonura, već iz kosmodroma Plesecka na lansirnim vozilima "Sojuz-2", rekao je zamenik komandanta ruskih svemirskih snaga Aleksandar Kvasnikov. “Planira se postepeno lansiranje lansiranja ruskih globalnih navigacijskih sistema GLONASS od Baikonura do kosmodroma Plesekce. Planirano je da se ova lansiranja sprovedu na modernizovanim lansirnim vozilima "Sojuz-2", "izjavio je Kvasnikov u ponedeljak, govoreći na međunarodnom forumu o satelitskoj navigaciji.
Prema njegovim riječima, prijenos lansiranja s Bajkonura na Pleseksk osigurat će neovisnost Rusije u smislu lansiranja vlastite letjelice u orbitu.
Kao što je istakao zamjenik komandanta svemirskih snaga, opseg upotrebe satelitskih navigatora GLONASS u vojsci proteže se od pružanja pojedinih vojnika informacijama o njegovim koordinatama do pružanja cjelovitih vojnih jedinica navigacijskim informacijama.
“Sa lansiranjem GLONASS satelita, u vozilu se postavlja kompaktna jedinica koja obezbeđuje visokoprecizna kontinuirana merenja putanje tokom leta rakete. Ranije se tražila metoda koja je zahtijevala uključivanje velikog broja ljudi i sredstava, na osnovu obezbjeđivanja kontrole letenja rakete pomoću tačaka mjerenja putanje na tlu, ”rekao je Kvasnikov.
Prema njegovim riječima, ruske svemirske snage trenutno testiraju teren i prijenosnu opremu navigacijskog sustava GLONASS.
"Njegova upotreba će omogućiti korišćenje GLONASS prijemnika u svim vremenskim uslovima, pružajući veoma preciznu referencu na koordinate i vreme, posebno u veoma neravnom i planinskom terenu", rekao je zamenik komandanta.
Usporedba GLONASS-a i GPS-a.

Razmotrimo neke karakteristike glavnih satelitskih navigacionih sistema (NAVSTAR i GLONASS): Oba sistema imaju dvostruku namjenu - vojnu i civilnu, stoga emituju dva tipa signala: jedan sa smanjenom preciznošću u određivanju koordinata (~ 100 m) za civilnu upotrebu i drugi sa visokom preciznošću (~ 10 m). -15 m i preciznije) za vojnu upotrebu. NAVSTAR sateliti se nalaze u šest aviona na nadmorskoj visini od oko 20,180 km. GLONASS sateliti (kod “uragana”) nalaze se u tri ravnine na nadmorskoj visini od oko 19.100 km. Nominalni broj satelita u oba sistema je 24. Konstelacija NAVSTAR bila je u potpunosti popunjena u aprilu 1994. godine i od tada je održana, konstelacija GLONASS je u potpunosti raspoređena u decembru 1995. godine, ali se od tada znatno degradirala. Trenutno se aktivno oporavlja. Oba sistema koriste signale bazirane na tzv. "Pseudo-šumne sekvence", čija upotreba im daje visoku otpornost na buku i pouzdanost pri niskoj snazi odašiljača. U skladu sa svrhom, u svakom sistemu postoje dvije osnovne frekvencije - L1 (standardna preciznost) i L2 (visoka preciznost). Za NAVSTAR L1 = 1575,42 MHz i L2 = 1227,6 MHz. U GLONASS-u se koristi frekventno razdvajanje signala, tj. Svaki satelit radi na svojoj frekvenciji i, shodno tome, L1 je u opsegu od 1602.56 do 1615.5 MHz i L2 od 1246.43 do 1256.53. Signal u L1 je dostupan svim korisnicima, signal u L2 je dostupan samo vojsci (to jest, ne može se dešifrirati bez posebnog tajnog ključa). Svaki satelit sistema, pored osnovnih informacija, također prenosi pomoćne informacije potrebne za kontinuirani rad prijemne opreme. Ova kategorija uključuje puni almanah cijele satelitske konstelacije koja se prenosi sekvencijalno tijekom nekoliko minuta. Dakle, početak prijemnog uređaja može biti dovoljno brz ako sadrži stvarni almanah (oko 1 minut) - to se naziva "topli start", ali može potrajati i do 15 minuta ako je prijemnik primoran da primi puni almanah - t. n “Hladno pokretanje”. Potreba za „hladnim startom“ obično nastaje kada se prijemnik prvi put uključi, ili ako se ne koristi dugo vremena.Diferencijalno mjerenje
Odvojeni modeli satelitskih prijemnika omogućuju proizvodnju tzv. "Diferencijalno merenje" udaljenosti između dve tačke sa velikom tačnošću (centimetara). Da biste to uradili, izmerite položaj navigatora na dve tačke u kratkom vremenskom periodu. Istovremeno, iako svako takvo merenje ima tačnost reda 10–15 metara bez sistema korekcije na zemlji i 10–50 cm sa takvim sistemom, izmerena udaljenost ima mnogo manju grešku, jer faktori ometaju merenje (greška orbite satelita, atmosferska heterogenost, itd.). d.) u ovom slučaju se međusobno odbijaju. Pored toga, postoji nekoliko sistema koji šalju razjašnjavajuće informacije ("diferencijalna korekcija koordinata"), što omogućava da se poveća tačnost merenja koordinata prijemnika na deset centimetara. Diferencijalna korekcija se zasniva na geostacionarnim objektima (sateliti, zemaljske bazne stanice), obično se plaća (signal se može dešifrirati samo jednim specifičnim prijemnikom nakon plaćanja „pretplate za uslugu“). Trenutno (2006) postoji besplatan evropski sistem EGNOS (European Geostationary Navigation Overlay Services), zasnovan na dva geostacionarna satelita, koji daje visoku preciznost (do 30 cm), ali radi povremeno i nepouzdano. U Sjevernoj Americi, njegov pandan je WAAS sistem.
NEDOSTATAK GPS SISTEMA.
Uprkos svim prednostima, postoje GPS nedostaci. Na primer, GPS prijemnik može biti isključen u bilo kom trenutku, recimo, iz bezbednosnih razloga SAD-a. Osim toga, uvođenje GPS tehnologije podrazumijeva dostupnost detaljnih elektronskih karata u mjerilu do 100 m, koje nisu komercijalno dostupne u svakoj zemlji. Nemoguće je ne spomenuti činjenicu da prilikom izračunavanja koordinata satelitskog sistema dopuštaju greške. Priroda ovih grešaka je različita. Glavni izvori grešaka koji utiču na tačnost izračuna navigacije u GPS sistemu su:
Greške usled selektivnog načina pristupa (S / A). Koristeći ovaj način, američko Ministarstvo odbrane namjerno smanjuje točnost lokacije za civile. U S / A modu, generiraju se umjetne greške koje se ubacuju u signal GPS satelita kako bi se poboljšala navigacijska mjerenja. Takve greške su netačni podaci o orbiti satelita i izobličenja očitanja njegovih sati zbog uvođenja dodatnog pseudo-slučajnog signala. Veličina standardne devijacije zbog uticaja ovog faktora je oko 30 m.
Greške povezane sa širenjem radio-talasa u jonosferi. Kašnjenja u širenju signala dok prolaze kroz gornje slojeve atmosfere rezultiraju greškama reda 20-30 metara u popodnevnim satima i 3–6 metara noću. Uprkos činjenici da navigacijska poruka koja se prenosi sa GPS satelita sadrži parametre modela jonosfere, kompenzacija za stvarno kašnjenje je, u najboljem slučaju, 50%.
Greške povezane sa širenjem radio-talasa u troposferi. Pojavljuju se kada radio talasi prolaze kroz donje slojeve atmosfere. Vrijednosti pogrešaka ovog tipa kod korištenja signala sa S / A-kodom ne prelaze 30 m.
Greška ephemeris. Greške nastaju zbog neslaganja između stvarnog položaja GPS satelita i njegove procijenjene pozicije, koja se određuje prema navigacijskom signalu koji se prenosi sa satelita. Vrednost greške obično nije 3m.
Vreme odlaska satelitske vremenske skale uzrokovano je neskladom između vremenskih skala različitih satelita. On se može eliminisati korišćenjem stanica za praćenje tla ili kompenzacijom pomaka vremenske skale u režimu diferencijalne pozicije.
Pogreška u određivanju udaljenosti do satelita je statistički pokazatelj. Izračunava se za određeni satelit i određeni vremenski interval. Greška nije povezana sa drugim tipovima grešaka. Njegova vrijednost obično ne prelazi 10 m.
NEDOSTACI GLONASS SISTEMA:
Potreba za pomjeranjem frekvencijskog raspona udesno, jer trenutno GLONASS ometa rad mobilnih satelitskih komunikacija i radio astronomije
Kod promene satelitske efemeride, greške koordinata u normalnom režimu povećavaju se za 25-30m, au diferencijalnom režimu preko 10m;
Ispravljanje sekundarnog trčanja prekida kontinuitet GLONASS signala. To dovodi do velikih grešaka u određivanju koordinata mjesta potrošača, što je neprihvatljivo za civilno zrakoplovstvo;
Teškoća u preračunavanju podataka sistema GLONASS i GPS zbog nedostatka zvanično objavljene matrice prelaza između korišćenih koordinatnih sistema.
Evropska unija razvija satelitnavigacija galileo. Kina takođe razvija svojenavigacijski sustav Beidou će do kraja 2008. godine pokriti teritoriju Kine i većinu susjednih azijskih zemalja.
Galileo - satelitski sistemnavigacijakoju razvija Evropska unija. Jedinstveni koncept je usvojen 1999. godine, a prvobitni razvojni plan je odobren 2003. godine i predviđa pokretanje sistema u 2008. godini.
Međutim, to je bilo frustrirano zbog neslaganja između vlada zemalja EU i nespremnosti privatnih kompanija da ulažu u Galileo. Konzorcijum privatnih kompanija činili su EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat i njemačka grupa, uključujući Deutsche Telekom i Njemački aerospace centar.
U maju 2007. godine, konzorcijum se povukao iz projekta, a Evropska komisija preuzela je vodstvo Galilea. Sada od 30 planiranih satelita u orbiti postoji samo jedan, a drugi je planiran za orbitu 27. aprila 2008. godine.
EU je u ovom trenutku na ovaj projekat potrošila oko milijardu eura
Za razliku od američkog GPS-a i ruskog GLONASS-a, sistem Galileo ne kontroliraju ni državne ni vojne institucije. Razvoj vrši ESA. Ukupni troškovi stvaranja sistema procjenjuju se na 3,8 milijardi eura. Prvi satelit Galileo sistema isporučen je na kosmodrom Baikonura 30. novembra 2005. godine. Dana 28. decembra 2005. godine, u 8:19 sati, letelica GIOVE-A (Galileo In-Orbit Validation Element) je lansirana u proračunsku orbitu sa nadmorskom visinom većom od 23.000 km sa nagibom od 56 ° .Masu uređaja je 700 kg, ukupno dimenzije: dužina - 1,2 m, prečnik - 1,1 m. Trajanje aktivnog postojanja je 12 godina. „ESA“ Evropska svemirska agencija (Evropska svemirska agencija) je međunarodna organizacija osnovana 1975. godine kako bi ujedinila napore da osvoji prostor u korist Galileovih Evropljana.
Uticaj jonosfere na karakteristike transionosferskih radio signala
Elektromagnetski talasi koji se šire kroz jonosferu doživljavaju širok spektar poremećaja. Glavna karakteristika jonosfere, koja određuje promenu parametara radio talasa, je integralni (puni) elektronski sadržajI (t ) ili njegovih derivata (u vremenu i prostoru)I ´ t (t ), I x (t ) i I y (t a) duž puta propagacije.
Promjene PES-a mogu se podijeliti na redovne i nepravilne. Redovne promjene (sezonske, dnevne), barem za magnetno tihu ionosferu srednje širine, opisane su modelima koji daju relativnu točnost predviđanja PES-a do 50 - 80%. Nepravilne promene (varijacije) povezane su sa nejednakostima jonosfere različite prirode, čiji je spektar moćan.
Kao rezultat nedavnih studija, postalo je jasno da poremećaji ionosfere tokom magnetnih oluja utiču na degradaciju signala i kvarove GPS sistema ne samo na ekvatoru iu polarnoj zoni, već čak i na srednjim geografskim širinama. Međutim, pitanje uzroka i specifičnih mehanizama tog uticaja ostaje uglavnom otvoreno.
Glavni zadatak budućih istraživanja je proučavanje fizičkih mehanizama višestrukih varijacija u ukupnom sadržaju elektrona u jonosferi tokom geomagnetskih poremećaja blizu Zemljinog prostora, praćeno degradacijom signala i kvarova satelitskih radio sistema. Ove studije bi trebale biti kompleksne uz maksimalno uključivanje velikog broja nezavisnih eksperimentalnih sredstava za praćenje jonosfere (digitalni jonosondi, radijatori nekoherentnog rasipanja, cvrčanje ionosonda, itd.).
GPS preciznost
Svaki kompletan skup podataka uključuje ionosferski model, koji se koristi na prijemniku za približavanje faznog kašnjenja signala dok prolazi kroz ionosferu na bilo kojoj satelitskoj lokaciji iu bilo koje vrijeme. Metode mjerenja udaljenosti do satelita korištenjem pseudo-slučajnog koda. Pseudo-domet - udaljenost između antene prijemnika i satelita izmjerena pseudo-slučajnim kodom. Kao što je ranije pomenuto, ove udaljenosti su neophodne za izračunavanje koordinata. Postupak određivanja pseudog raspona može se opisati na sljedeći način.
Zamislite da su sat na satelitu i prijemnik potpuno sinhronizovani. Kada se PRN kod prenosi sa satelita, prijemnik reprodukuje tačnu kopiju istog koda. Posle nekog vremena, prijemnik će primiti kod koji prenosi satelit. Upoređivanjem prenesenog koda i njegove tačne kopije, prijemnik može izračunati vrijeme potrebno za pristup kodu prijemnika. Umnožavanje vremena putovanja brzinom svetlosti daje nam domet između satelita i prijemnika. Mjerenje udaljenosti po kodu Nažalost, pretpostavka da su prijemnik i sat satelita potpuno sinkronizirani nije u potpunosti točna. Ova metoda izračunavanja opsega bi zahtijevala vrlo preciznu sinkronizaciju satelita satelita i prijemnika. GPS sateliti su vrlo precizni atomski satovi, vrlo je skupo osigurati prijemnik s takvim satovima, jer njihova cijena može doseći 20.000 dolara.
Problem sinhronizacije sata je riješen razmatranjem greške sata prijemnika kao dodatne nepoznanice u navigacijskim jednadžbama.
Udaljenost između satelita i prijemnika je suma ukupnog broja kompletnih ciklusa plus frakcijski ciklus između prijemnika i satelita pomnoženog sa talasnom dužinom nosioca. Raspon koji definira faza nosioca ima mnogo veću točnost od raspona dobivenog kodom.
Međutim, postoji jedan problem. Nosač val je sinusni talas, što znači da svi ciklusi izgledaju isto. Stoga, GPS prijemnik ne može razlikovati jedan ciklus od drugog. Drugim rečima, prijemnik, kada je uključen, ne može da odredi ukupan broj kompletnih ciklusa između satelita i prijemnika. Može odrediti samo frakcijski dio ciklusa (s točnošću od najmanje 2 mm), dok je ukupan broj ciklusa nepoznat ili nejasan.
Srećom, prijemnik može pratiti promjenu faze dok je uključen. To znači da se početna nesigurnost vremenom rješava. Određivanje ukupnog broja nosivih ciklusa (talasnih dužina) između antene i satelita naziva se rezolucija dvosmislenosti - traženje cjelobrojne vrijednosti broja valnih duljina. Za naknadna mjerenja, koja se koriste za određivanje lokacije sa centimetarskom preciznošću, ova cijela vrijednost se određuje tijekom obrade na računalu. Za mjerenja u stvarnom vremenu, koja se koriste za određivanje položaja sa centimetarskom preciznošću, ova cijela vrijednost se određuje tijekom procesa koji se zove inicijalizacija.
Signal preskakanja petlje je skok na cijeli broj ciklusa u fazi nosioca prilikom mjerenja udaljenosti. Gubitak signala može biti uzrokovan preprekom između signala i satelita. Radio smetnje, ionosferske smetnje i visoka dinamika prijemnika - sve to može biti uzrok gubitka signala. Slično tome, može doći do klizanja ciklusa usled kvara prijemnika. Preskakanje petlje može trajati bilo koje vrijeme.
Koordinate vaše bazne stanice morate znati što točnije moguće, jer preciznost koja proizlazi iz diferencijalne korekcije direktno ovisi o točnosti koordinata bazne stanice. Postoje dva načina za vršenje diferencijalne korekcije, u realnom vremenu iu post-procesiranju.
Vjerujem da razvoj SNA pomaže da se dobro razvije i zemlja koja posjeduje sam SNA. Aktivno istraživanje svemira u blizini naše planete se nastavlja. Postignuća u oblasti radio elektronike zaista značajno pomažu ne samo u vojnim, već iu civilnim svrhama. Na primjer, zahvaljujući CH-u, potraga za planinskim turistima je postala mnogo lakša, CH je „pomoćni“ vozač na putevima i ne samo. Ali, kako god bilo, dobro je imati lošu stranu ... stalno je zagađenje blizu Zemljinog prostora već korištenim satelitima i njihovim fragmentima. Moramo ispuniti naše potrebe bez štete za okoliš, što mi rijetko radimo .... NAUČNI I INFORMACIONI CENTAR ZA KOORDINACIJU (2002). - službeni tehnički opis parametara i GLONASS signala. Provjereno 14. prosinca 2009.
RUSKI ZNANSTVENO-ISTRAŽIVAČKI INSTITUT PROSTORNOG INSTRUMENTA (2008). - službeni tehnički opis parametara i GLONASS signala. Provjereno 14. prosinca 2009.
Državni univerzitet u Rostovu
Odsjek za primijenjenu geodeziju
Satelitski navigacijski sustavi GPS i Glonass
Završeno: Stud. PG-579 R. Veremchuk
Provjereno: Yakovlev V.A.
Rostov-na-Donu
Uvod
U decembru 1976. godine usvojena je Rezolucija Centralnog komiteta CPSU i Vijeća ministara SSSR-a "O raspoređivanju jedinstvenog svemirskog navigacijskog sistema GLONASS (GLOBAL Navigation Satellite System)". Ova odluka u suštini je samo legitimirala već započeti rad na stvaranju novog sistema i odredila proceduru njegovog razvoja i testiranja. Tehnički predlozi za GLONASS sistem kao deo letilice 11F654 "Uragan" razvijeni su u Krasnoyarsk NPO Applied Mechanics (NPO PM) početkom 1976. godine i razmatrani od strane međuresorne komisije u avgustu iste godine. Sistem GLONASS predstavlja drugu generaciju domaćih satelitskih navigacijskih sistema. Stvaranje ovog navigacionog sistema bilo je predodređeno potrebama novih potencijalnih potrošača, koji su morali tačno uskladiti svoju poziciju u vremenu i prostoru. Takvi potrošači su bili avijacija, mornarica, kopnena vozila, svemirski brodovi i specijalni borbeni sistemi (posebno mobilne ICBM srednjeg i dugog dometa). Široko rasprostranjena pažnja na satelitsku navigaciju privukla je uspješan rad navigacijskih satelitskih sustava niskih orbita od strane pomorskih potrošača. Godine 1976, sovjetska vojska je usvojila sistem za navigaciju i komunikacije Tsiklon-B koji se sastoji od šest Parusovih satelita, kružeći na 1000 km orbita polarnih polarnih orbita. Tri godine kasnije, satelitski navigacioni sistem (SRNS) “Cicada” pušten je u rad kao dio četiri satelita u orbiti iste klase kao i satelit Parus. I ako je prvi sistem korišten isključivo u interesu Ministarstva odbrane SSSR-a, drugi je bio namijenjen uglavnom za plovidbu civilnim brodovima. Opremanje trgovačkih brodova satelitskom navigacijskom opremom pokazalo se vrlo profitabilnim, jer je zbog povećane preciznosti plovidbe bilo moguće uštedjeti toliko vremena plovidbe i goriva da je oprema za potrošače na brodu sama plaćena nakon prve godine rada. Tokom testiranja ovih i ciklonskog sistema koji im je prethodio, utvrđeno je da je greška pozicioniranja plovila na navigacijskim signalima ovih satelita 250 ... 300 m. Pokazalo se i da je glavni doprinos grešci navigacijskih definicija napravljen se izračunavaju i stavljaju na brod svemirski brod pomoću kompleta za kontrolu tla (NKU). U cilju poboljšanja tačnosti određivanja i predviđanja parametara orbita navigacionih satelita, razvijena je posebna šema za mjerenje parametara orbita pomoću niskonaponskih rasklopnih uređaja, razvijene su preciznije tehnike predviđanja. Da bi se identifikovale lokalne karakteristike gravitacionog polja Zemlje, koje utiču na odabrane orbite navigacionih satelita (NCA), na iste orbite lansirani su specijalni geodetski sateliti Kosmos-842 i Kosmos-911. Skup mjera omogućio je da se razjasne koordinate mjernih sredstava i izračunaju parametri odgovarajućeg modela gravitacionog polja, posebno dizajniranog za određivanje i predviđanje parametara kretanja NCA. Kao rezultat toga, preciznost sopstvenih efemerida prenosi se kao deo navigacionog signala povećana je skoro za red veličine, tako da greška u dnevnom prognoziranom intervalu nije prelazila 70 ... 80 m. Kao rezultat, greška u određivanju položaja brodova na njihovom položaju smanjila se na 80 ... 100 m .
Međutim, nisko orbitni sistemi ne mogu ispuniti zahtjeve svih potencijalnih klasa novih potrošača zbog principa na kojima se zasniva njihova konstrukcija. Dakle, ako je za stacionarne potrošače sa dvokanalnom prijemnom opremom, greška pozicioniranja smanjena na 32 m (podaci za američki SRNS Transit), onda se pri kretanju greške odmah počinju povećavati zbog netočnosti putanja računanja - nisko orbita SRNS nije omogućila određivanje brzina kretanja. Nadalje, samo dvije prostorne koordinate mogu se odrediti iz dobivenih mjerenja. Drugi nedostatak nisko orbitalnih sistema je nedostatak globalne pokrivenosti, jer su, na primjer, na ekvatoru sateliti prolazili kroz zonu vidljivosti potrošača nakon prosječno 1,5 sati, što omogućava samo diskretne sesije navigacije. Konačno, zbog upotrebe samo jedne NCA u sesiji, trajanje mjerenja može biti do 10 ... 16 minuta. Dugotrajnost sesija i značajni intervali između njih čine neizbježnim korištenje posebnih mjera za izračunavanje putanje. U ovom slučaju, greške izračunavanja i ograničenje tačnosti pozicioniranja. Ipak, avionska oprema je testirana u odnosu na signale iz Transit sistema i Cicade. Takođe je potvrđeno da je greška pozicioniranja slabo ovisna o manevrima zrakoplova i da je stvarno određena uglavnom greškama u poznavanju brzine na zemlji, bez prelaska preko 1,8 km.
SRNS druge generacije je prvobitno zamišljena kao sistem, koji svi ovi nedostaci nisu karakteristični. Glavni zahtjev u dizajnu je bio da se osigura da potrošač u bilo koje vrijeme može odrediti tri prostorne koordinate, vektor brzine i točno vrijeme, što se postiže istovremenim prijemom signala od najmanje četiri NCA. Na kraju, to je dovelo do implementacije važne tehničke ideje - koordinacije prostornog položaja satelita u orbitama i vremenske koordinacije signala emitovanih od strane satelita. Koordinacija kretanja svih nacionalnih nadležnih tijela daje svojstvima mrežne mreže koju gubi u odsustvu korekcije položaja nacionalnih nadležnih tijela.
Za novi sistem, srednje-visoke (20.000 km) poludnevne orbite prvobitno su odabrane kao orbite, što je osiguralo optimalan odnos između broja satelita u sistemu i veličine radio-istraživačkog područja. Međutim, visina radne orbite je kasnije smanjena na 19.100 km. Ovo je urađeno na osnovu činjenice da se za letilice sa periodom cirkulacije od pola dana manifestuje rezonantni efekat uticaja određenih harmonika geopotencijala, što dovodi do prilično brzog "uništavanja" datog relativnog položaja NCA i konfiguracije sistema u celini. Očigledno, u ovom slučaju, da bi se održao sistem, bilo bi neophodno izvršiti češće korekcije orbite svakog letilice. Sa izabranom visinom orbite za garantovanu vidljivost od strane potrošača najmanje četiri satelita, njihov broj u sistemu bi trebao biti 18, ali je povećan na 24 kako bi se poboljšala preciznost određivanja vlastitih koordinata i brzine potrošača dajući mu izbor od četiri vidljiva satelita, pružajući mu izbor od četiri. najveća preciznost. Treba napomenuti da u ovom trenutku ovaj zahtjev više nije relevantan, budući da moderna standardna oprema za navigaciju potrošača (NAP) ima mogućnost primanja signala od 8 do 12 NKA u vidljivom području u isto vrijeme, što omogućava da se ne brine o odabiru najboljih četiri, već da se obavi sva mjerenja .
Jedan od glavnih problema u stvaranju SRNS-a, koji istovremeno omogućava definiranje navigacije bez upita u više satelita, je problem međusobne sinkronizacije satelitskih vremenskih ljestvica s milijardama djelića sekunde (nanosekundi, ns), jer nenormalni navigacijski signali emitirani od strane satelita uzrokuju dodatnu pogrešku u određivanju lokacija korisnika do 10 ... 15 m. Da bi se riješio problem precizne sinhronizacije vremenskih skala, potrebna je ugradnja na satelitima. visoko stabilni cezijumski frekventni standardi i zemaljski vodikov standard (reda veličine stabilniji), kao i stvaranje zemaljskih sredstava za usporedbu vaga s točnošću od 3 ... 5 ns.
1977-78 NPO PM je sproveo preliminarni projekat sistema, čiji su materijali odobreni u septembru 1978. godine od strane međuresorne komisije kojom je predsedavao general-major I. V. Meshcheryakov. Taktičko-tehnički zadatak (TTZ) za sistem GLONASS koordinisan je sa komandantima svih ogranaka Oružanih snaga i ministarstvima: Ministarstvom opšte mašinerije, Ministarstvom radio industrije, Minaviapromom, Ministarstvom odbrane, Ministarstvom za morfologiju, Ministarstvom ribarstva, Ministarstvom pravosuđa i Ministarstvom civilnog vazduhoplovstva. U novembru 1978. godine TTZ je odobren od strane ministra odbrane SSSR-a.
Međutim, do tada, zbog predugog perioda koordinacije zadataka, početni rokovi za raspoređivanje sistema bili su narušeni. Stoga je 29. avgusta 1979. godine donesena nova Uredba Centralnog komiteta i Vijeća ministara Ukrajine o GLONASS-u. On je postavio sledeće rokove za sistem:
Početak letačkih testova i stvaranje sistema od 4-6 svemirskih letilica "Uragan" za testiranje osnovnih principa i tehničkih karakteristika -1981 godine;
Stvaranje sistema 10-12 Uragan svemirskih letjelica (u dvije orbitalne radne ravni) i stavljanje u funkciju sa i sa taktičkim i tehničkim karakteristikama dogovorenim između Ministarstva odbrane, Ministarstva opšte mašinerije i Ministarstva radio industrije - 1984;
Naknadna ugradnja sistema na 24 satelita - 1987.
Identifikovani su glavni programeri sistema u Rezoluciji:
NPO PM Minobschemash - na sistemu u cjelini;
ON "Radiopribor" (sada RNII KP) Ministarstva opšte industrije - na terenu kontrolni kompleks, ugrađeni radio-inženjerski kompleks, potrošačka oprema;
LNRTI (sada RIRT) Ministarstva za Radioprom - o navigacijskom i vremenskom kompleksu.
Međutim, ove procedure i termini morali su se ponovo razjasniti u julu 1981. godine. U novoj Rezoluciji Centralnog komiteta i Vijeća ministara, 1982. godine je nazvan datum početka primjene sistema.
Letna testiranja sistema GLONASS lansirana su 12. oktobra 1982. godine, lansiranjem prvog 11F654 “Uragan” svemirskog broda N11l i dvodimenzionalnih i težinskih prototipova 11F654GVM. Zatim, u narednih šest lansiranja, dva stalna satelita i jedan GWM su lansirani u orbitu. To je bilo zbog nedostupnosti satelitske elektronske opreme. Samo od osmog lansiranja u okviru raspoređivanja sistema GLONASS (16. septembar 1986.) tri ormarića su puštena u rad. Dvaput (10. januar i 31. maj 1989. godine), zajedno sa dva uraganska satelita, u orbitu su stavljeni pasivni geodetski sateliti DIK-a "Etalon" koji su koristili za preciziranje parametara gravitacionog polja i njegov uticaj na orbite satelita uragana.
Za testiranje navigacione opreme, osnovni setovi od po šest komada za svako ime napravljeni su za vazduhoplovstvo, mornaricu, SV, MGA, MMF i Strateške raketne snage. Ukupno 22 svemirska broda (9-10 lansiranja) su dodeljena za letne testove. Ovaj broj svemirskih letelica je potrošen do 16. septembra 1987. godine. Međutim, do tog vremena sistem nije bio primenjen čak ni za ograničenu upotrebu (12 letelica u dve ravni). Tek nakon lansiranja 4. aprila 1991. godine, 12 operativnih svemirskih letelica pojavilo se u isto vrijeme kao dio GLONASS-a.
Dana 24. septembra 1993. godine puštena je u rad prva faza sistema GLONASS. Od tog trenutka počela je sa letenjem letelice u treći orbitalni avion. 14. decembra 1995. godine, nakon 27. lansiranja Proton-K sa Uraganima, završena je implementacija standardne konfiguracije sistema GLONASS. Ukupno, od oktobra 1982. do decembra 1998., u orbitu je lansirano 74 "Uragan" satelita i osam njegovih dimenzionalnih i težinskih modela (GWM). Tokom raspoređivanja sistema, šest "uragana" našlo se u orbiti izvan dizajna zbog kvarova jedinice za ubrzavanje 11C861. Prema procenama iz 1997. godine, skoro 2,5 milijarde dolara potrošeno je na implementaciju sistema.
Osnovni principi GLONASS sistema
GLONASS sateliti kontinuirano emituju dva tipa navigacijskih signala: standardnu preciznost navigacijskog signala (ST) u L1 pojasu (1,6 GHz) i visoko precizne navigacijske signale (BT) u L1 i L2 pojasima (1,2 GHz). Informacije koje pruža ST navigacijski signal dostupne su svim potrošačima na trajnoj i globalnoj osnovi i uz korištenje GLONASS prijemnika moguće je odrediti:
• Horizontalne koordinate sa tačnošću od 50-70 m (verovatnoća 99.7%);
· Vertikalne koordinate sa tačnošću od 70 m (verovatnoća 99,7%);
· Komponente vektora brzine sa tačnošću od 15 cm / s (verovatnoća 99,7%)
· Tačno vrijeme s točnošću od 0,7 µs (vjerojatnost 99,7%).
Ova preciznost se može značajno poboljšati metodom diferencijalne navigacije i / ili dodatnim posebnim mjernim metodama.
VT signal je namijenjen uglavnom potrošačima Ministarstva odbrane Ruske Federacije, a njegovo neovlašteno korištenje se ne preporučuje. Razmatra se pitanje pružanja VT signala civilnim potrošačima.
Za određivanje prostornih koordinata i tačnog vremena potrebno je primati i obrađivati navigacione signale od najmanje 4 GLONASS satelita. Pri prijemu radio-navigacionog signala GLONASS prijemnik, koristeći poznate radio-inženjerske metode, mjeri udaljenost do vidljivih satelita i mjeri brzinu njihovog kretanja.
Istovremeno sa merenjima, prijemnik automatski obrađuje vremenske oznake i digitalne informacije sadržane u svakom navigacijskom radio signalu. Digitalne informacije opisuju položaj datog satelita u prostoru i vremenu (efemeride) u odnosu na vremensku skalu jednog sistema i geocentrično pridruženog kartezijanskog koordinatnog sistema. Pored toga, digitalne informacije opisuju položaj drugih satelita sistema (almanah) u obliku keplerskih elemenata njihovih orbita i sadrže neke druge parametre. Rezultati mjerenja i primljene digitalne informacije su početni podaci za rješavanje navigacijskog zadatka određivanja koordinata i parametara kretanja. Problem navigacije se automatski rješava u računalnom uređaju prijemnika i koristi se dobro poznata metoda najmanjih kvadrata. Kao rezultat rešenja, određuju se tri koordinate lokacije potrošača, njegova brzina kretanja i vremenska skala potrošača su povezani sa skalom koordiniranog univerzalnog vremena (UTC).
Polje radio navigacije
Navigacioni radio signali koje emituju regularni nadležni nadležni organi formiraju radio navigacijsko polje u blizini Zemlje.
U GLONASS SRNS-u, svaka regularna NFA zrači 1600 MHz i 1250 MHz radio signala prema Zemlji koristeći predajne antene, od kojih je radni dio dijagrama zračenja (DN) 2 = 38 širok i "osvjetljava" Zemljin disk sa viškom do visine h 0 iznad površine.
Radni dio uzorka snopa može se prikazati kao konusni radio snop s kutom od 2 0 na vrhu. Očigledno da
sin 0 = (h 0 + r) / (H + r),
gdje je r = 6400 km je radijus Zemlje; H = 19100 km of visina orbite NCA.
Zamjenjujući = 0 = 19, dobijamo h 0 = 2000 km.
Sa punim izduvnim gasom (24 standardna NCA), radionavigacijsko polje na visinama h h 0 = 2000 km je kontinuirano u prostoru, tj. Potrošač u bilo kojoj tački ovog prostora je “osvetljen” radio-zrakama iz najmanje četiri NCA, formirajući konstelaciju koja je zadovoljavajuća u smislu geometrije za on-line autonomno određivanje koordinata i vektora brzine.
Na visinama h h 0, radionavigacijsko polje postaje diskretno u prostoru. Svemirski objekti na nadmorskim visinama h 0 are h ill H su “osvijetljeni” radio-zrakama iz konstelacije potrebne za operativnu plovidbu (najmanje četiri nadležna tijela, uključujući i nacionalna nadležna tijela ispod lokalnog horizonta) ne svuda, već samo kada su u određenim prostorima.
Svemirski objekti na nadmorskim visinama h (H (na primjer, u geostacionarnoj orbiti) će biti “osvijetljeni” u nekim dijelovima njihove orbite radio-zrakama iz jedne ili dvije satelitske orbite (s punim ispušnim plinom), a NAP ne može odmah odrediti orbitu svemirskog objekta na temelju obrade navigacije. radio signale na “osvijetljenim” orbitalnim segmentima.
Mi se ograničavamo na razmatranje kontinuiranog radionavigacijskog polja (h h 0). Glavna karakteristika radionavigacijskog polja za zemaljskog korisnika je snaga radio-navigacijskog signala iz blizine zenita i blizu horizonta na izlazu "standardne" prijemne antene (bez uzimanja u obzir refleksije sa površine Zemlje):
P 0 = P n G (G) G 0 () / 2 / (4) R) 2,
gdje je P podatna snaga predajnika zračenja; G () of usmjerenost predajne antene (uzimajući u obzir gubitke u AFC) u smjeru prijemne antene; G 0 () of usmjerenost „standardne“ prijemne antene u smjeru prijenosne antene; talasna dužina nosivog talasa; R je udaljenost od prijemne antene do predajne antene.
U sistemu GLONASS, predajne antene za navigacione radio signale na NCA imaju kružnu polarizaciju radijacije desnim putem.
Usmjerenost G () prijenosnih antena u radnom sektoru smjerova 19 u odnosu na os antene je
Kao "standardna" prijemna antena, pogodno je razmotriti izotropnu prijemnu antenu sa kružnom polarizacijom, G0 (=) = 1.
Udaljenost R od prijemne antene koja se nalazi na Zemljinoj površini do blizu zenita ( = 90) NFA će biti R = H = 19.100 km, do skoro horizontalne ( = 5) NFA će biti R = 24.000 km.
Energetski proračun P 0 uskopojasnog radio-signala za navigaciju na izlazu “standardne” prijemne antene:
| 1600 MHz | 1250 MHz | |||
| Ug, u grad | 90 | 5 | 90 | 5 |
| P p dB W | | | ||
| G (), dB | +10 | +12 | +9 | +11 |
| ( R) 2, dB | 182 | 184 | 180 | 182 |
| G 0 (), dB | 0 | 0 | ||
| P 0 dB | 157 1 | 157 1 | 162 1 | 162 1 |
Treba primetiti da je snaga radio-signala za navigaciju primljenog od strane zemaljskog potrošača pomoću izotropne antene ista za skoro zenitni i skoro horizontalni NCA.
GLONASS signalna struktura
kod grubog ranga koji se prenosi brzinom od 511 Kbps (slika 6c);
sekvence navigacijskih podataka koji se prenose pri 50 bit / s (slika 6a);
oscilacije meandera koje se prenose pri 100 bps (slika 6b).
Signal u rasponu L1 (sličan C / A kodu u GPS-u) dostupan je svim potrošačima u vidnom polju letilice. Signal u dometu L2 namijenjen je vojnim potrebama, a njegova struktura nije prikazana.
Za navigacione radio signale, DI se formira na NCA na osnovu podataka koji se prenose iz NKU sistema na NCA odbor koristeći sredstva radio-inženjeringa. Prenesena u navigacijskim radio signalima, DI je strukturirana u obliku linija, okvira i superframa.
U radio-signalu navigacije u opsegu od 1600 MHz, linija DI ima trajanje od 2 s (zajedno sa MB) i sadrži 85 binarnih simbola od 20 ms koji se prenose u relativnom kodu. Prvi znak svake linije je početni (“idle”) za relativni kod. Posljednjih osam znakova u svakoj liniji su znakovi provjere Hammingovog koda, koji dopuštaju da ispravi jedan znak pogreške i otkrije dva znaka greške u liniji. Okvir sadrži 15 linija (30 s), superframe 5 okvira (2,5 min).
Svaki okvir sadrži punu količinu operativnog QI i dio almanaha sistema. Puni almanah se prenosi unutar superframea.
Operativni DI u okviru se odnosi na NKA, emituje radio signal za navigaciju i sadrži:
· Znaci pouzdanosti QI u okviru;
· Vreme početka okvira t k;
koordinate informacija o efemeridama i derivate koordinata NCA u pravokutnom geocentričnom koordinatnom sistemu u vremenu t 0;
· Vremensko-frekventne korekcije (PhVP) u trenutku t 0 u obliku relativne korekcije nosivosti frekvencije navigacionog radio signala i izmjene BSV NKA;
· Vreme t 0.
Vreme t 0 na koje su EI i PRP „vezani“ su višestruki od 30 minuta od početka dana.
Almanah sistema sadrži:
· Vrijeme na koje se odnosi almanah;
· Parametri orbite, broj par nosivih frekvencija i izmjena BSV za svaku regularnu NCA u ispušnom plinu (24 NCA);
· Amandman na CV sistem u odnosu na SC zemlje, greška amandmana nije veća od 1 μs.
Almanah sistema je neophodan u NAP-u za planiranje sesije navigacije (odabir optimalne konstelacije satelita) i za prijem navigacionih radio signala u sistemu (predviđanje Doppler pomaka frekvencije nosioca). Operativni DI je potreban u NAP-u u navigacijskoj sesiji, jer se PNP unosi u rezultate mjerenja, a EI se koristi za određivanje koordinata i vektora brzine potrošača.
U NAVSTAR QI sistemu u uskopojasnim navigacijskim radio signalima, on je strukturiran na sljedeći način: linija ima trajanje od 6 s, okvir sadrži 5 linija (30 s), superframe 25 kadrova (12,5 min).
Uski pojasni navigacioni radio signali u sistemu GLONASS omogućavaju brži prijem (ažuriranje) almanaha zbog kraćeg trajanja superframa (2,5 min) u poređenju sa NAVSTAR sistemom (12,5 min).
Navigacijska mjerenja u višekanalnom NAP-u
Razmotriti višekanalni NAP koristeći uskopojasne radio signale i namijenjen za globalnu navigaciju zemaljskih pokretnih objekata (kopna, more, zrak). Pretpostavljamo da se u NAP-u koristi široko usmerena prijemna antena.
U svakom kanalu, NAP u načinu praćenja za uskopojasni navigacioni radio signal uzima DI, a svaka druga dva se mjere navigacijski parametri pseudorange i radijalna pseudo-brzina.
Pseudorange od objekta do NCA se mjeri u NAP-u mjerenjem pomaka primljenog PSP1 u odnosu na referentni signal u NAP-u. Radijalna pseudo-brzina objekta u odnosu na NCA mjeri se mjerenjem pomaka nosive frekvencije primljenog radio signala navigacije u odnosu na frekvenciju referentnog signala u NAP-u. Referentni signal u NAP-u se formira pomoću kvarcnog oscilatora.
Rezultati mjerenja pseudorangli S k (t) za najmanje četiri odabrana NCA (k = 1, 2, 3, 4), uzimajući u obzir uvođenje PNP sadržane u QI okviru, mogu se izraziti na sljedeći način:
S k (t) = R k (t) + c (t) + c k (t) + S k (t),
gdje je R k (t) udaljenost od objekta do satelita; c brzinu svjetlosti; Of of (t) of pomak MV-a VAP-a (referentnog signala) u odnosu na CV-sisteme; ; k (t); NDP greška; In S k (t) greška merenja u NAP-u.
U dual-band NAP-u, navigacijska mjerenja pseudorangana na dvije noseće frekvencije MHz MHz 1600 MHz i n 50 1250 MHz omogućavaju isključivanje pogrešaka mjerenja ionosfere na sljedeći način. Neka je S 0 (t) izmjerena pseudoranga bez ionosferskih grešaka. Od gornjeg i donjeg raspona
S u (t) = S 0 (t) + A / ; S n (t) = S 0 (t) + A / ,
gde je A / 2 jonosferska greška merenja pseudonange, tada je algoritam za dobijanje kombinovanog rezultata S 0 (t), u kojem su isključene jonosferske greške, sledeći:
S 0 (t) = S u (t) -S n (t); m = / n / u = 7/9.
Pogreška mjerenja dvostruke pseudorange može se procijeniti na sljedeći način:
0 S 0 = in S u - n S n = 2.53 S u - 1.53 S n.
U navigacijskoj sesiji, rezultati mjerenja u NAP pseudoranganama za najmanje četiri NCA odabrana za sesiju i EI dobiveni od odabranih NCA-a omogućuju određivanje tri koordinate objekta i pomak lokalnog objekta BB (referentni signal) u odnosu na BB sustav.
Cilj ovog poglavlja je da se proceni greška merenja pseudoranganda u višekanalnom NAP-u kada se koriste uskopojasni navigacioni radio-signali. Glavni izvori greške mjerenja pseudorange u višekanalnom NAP-u su: šum i multipath na ulazu prijemnika, troposfera, jonosfera (u jedno-pojasnom NAP-u).
Prilikom procjene pseudo-dometnih grešaka zbog buke i višestaznog signala na ulazu prijemnika, pretpostavit ćemo da se diskriminatori kašnjenja koriste u NAP kanalima u PSP1 nadzornim krugovima, pri čemu je širina središnjeg linearnog dijela diskriminatorne karakteristike jednaka trajanju simbola PSP1.
Pogreška buke S (S) merenja pseudorange od jednog dometa može se procijeniti na sljedeći način:
gde je c brzina svetlosti; F 1 frequency taktna frekvencija PSP1; P c / g w energetski potencijal uskopojasnog radio-signala navigacije na ulazu prijemnika; k pogoršanje energetskog potencijala u prijemniku (k 1.5); T 0 interval usrednjavanja (akumulacije) mjerenja.
Energetski potencijali uskopojasnih navigacijskih radio signala na ulazu prijemnika u NAP sa prijemnom antenom širokog smjera (vidi gore) su [dB Hz]:
| = 90 | = 5 | |
| 1600 MHz | +47...49 | +39...44 |
| 1250 MHz | +43...45 | +34...39 |
i, shodno tome, greške buke kod mjerenja pri jednom rasponu pri usrednjavanju T 0 = 1 s će biti [m]:
| | | |
| (S in) 1600 MHz | 1,7...2,1 | 3,3...6,0 |
| S (S n) 1250 MHz | 3,0...4,0 | 5,9...10,5 |
Pogreška buke kod mjerenja dvo-pojasnog pseudograničenja nalazi se na sljedeći način:
(S 0) = (2 + 2) 1/2;
i, shodno tome, dobijamo pri T 0 = 1c
S (S 0) = 
Navigacioni radio signal iz blizine horizonta NCA može dospjeti do osnovnog pokretnog objekta ne samo direktno, već i zbog refleksije od površine Zemlje (multipath). Odraženi radio signal dolazi do objekta iz pravca ispod lokalnog horizonta, a kada se reflektuje, on se mijenja u suprotnom smjeru kružne polarizacije radio signala. Uzimajući u obzir ovu okolnost i prostornu selektivnost prijemne antene, snaga reflektovanog radio signala Pc2 bit će mnogo manja od snage izravnog radio signala Pc1 na ulazu prijemnika.
Greška pseudorange mjerenja na horizontalnu NCA zbog višestaznog signala kada se koristi uskopojasni navigacijski radio signal bit će maksimalna u gorem slučaju kada je kašnjenje t reflektiranog radio signala u odnosu na direktni radio signal na ulazu prijemnika ravna t = 1 / 2F 1, gdje je F1 taktna frekvencija PSP1 . Kada je t / 1 / 2F 1, a kada t 3 / 2F 1, greška će biti mnogo manja nego u najgorem stanju. Kod T 0 = 1 c, pseudo-dometna greška do NC-a blizu horizonta zbog višestaznog signala će biti jednaka najgorijoj situaciji za uskopojasne navigacijske radio signale
Zamjenjujući P c2 / P c1 = - (30 ... 32) dB, dobijamo (S) = 3.0 m, što se dobro slaže s eksperimentalnim podacima. Zbog toga, sa dvostrukim opsegom (1600 MHz, 1250 MHz) i T 0 = 1 c, dobijamo:
S (S 0) = ![]() S (S) = 9.0m.
S (S) = 9.0m.
U troposferi je brzina širenja radio valova c = c 0 / n (h), gdje je c 0 brzina širenja svjetlosti u vakuumu; n (h) indeks loma troposfere na visini h iznad površine Zemlje, n (h) .
Troposferska greška nepotrebnog mjerenja raspona (pseudo raspon) za NSC na NKA nadmorskim visinama može se naći na sljedeći način:
(R () = 
U NAP-u, troposferske greške se kompenziraju izračunatim korekcijama. Ako izračunamo troposferske korekcije za prosječne parametre troposfere (globalno), tada će njihova greška (R) iznositi 10% korekcije pop R ().
Da biste procenili greške, možete koristiti jednostavan eksponencijalni model troposfere:
(N (h) = (n (0) e -h / a;
i, zamjenjujući srednje vrijednosti (n (0) = 3 10 -4, a = 8 km, dobijamo:
Procenit ćemo jonosferske pogreške pseudorange mjerenja u jedno-pojasnom NAP-u (1600 MHz). Zemljina jonosfera počinje sa visine od 100 km, na nadmorskim visinama od 300 do 400, koncentracija elektrona u jonosferi je maksimalna i veća sa povećanjem nadmorske visine smanjuje se približno eksponencijalno, a na nadmorskoj visini od 900 km, koncentracija elektrona u ionosferi iznosi približno 10% maksimuma.
Grupna brzina radio signala u jonosferi je c = c 0 n (h), gde je c 0 brzina svetlosti u vakuumu, n (h) indeks refrakcije jonosfere na visini h iznad površine Zemlje, n (h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 MHz, možete koristiti jednadžbu:
(N (h) = 1-n (h) = 40.3 N (h) / f 2,
gde je N (h) koncentracija elektrona jonosfere na visini h [e / cm3]; f-nosivost frekvencije radio signala [kHz].
Procenićemo jonosferske greške nepotrebnog merenja dometa (pseudorange) do blizu zenita i blizu horizonta NCA.
Ionosferska greška u vertikalnom prolasku radio-snopa do prizemnog objekta iz protuzrakoplovnog satelita može se procijeniti na sljedeći način:
= R 1 = 
Vertikalni profil (n (h), u zavisnosti od visine, može se predstaviti kao:
1. za h 1 h 1 = 100 km (n (h) = 0;
2. kada je h 1 h 2 h 2 = 300 km n (h) linearno povećava na m n m, gdje je m n m maksimalna vrijednost n (h);
3. kada je h 2 h 3 h 3 = 400 km n (h) = n m;
4. kada je h 3 h 3 = 400 km n (h) = n m e
Koristeći ovu aproksimaciju za (n (h), dobijamo formulu za procenu jonosferske greške neophodnih merenja opsega (pseudo opsega) do zenita NS
R 1 = b e n m;
b e = 0,5 (h 2 -h 1) + (h 3 -h 2) + a = 400 km.
Parametar b e možemo nazvati debljinom ekvivalentne jonosfere, u kojoj (n (h) = n m na visinama h = 200 ... 600 km i izvan tih visina (n (h) = 0.
Ionosferska greška 2 R 2 horizontalne NCA pseudo-raspona ( ) može se grubo procijeniti na sljedeći način:
= R 2 = / R 1 / cos; sin = r / (r + h 3),
pri čemu je between ugao između radijskog snopa od horizontalnog NCA ( ) i lokalne vertikale na visini h 3 = 400 km (sredina ekvivalentne jonosfere); r je radijus Zemlje. Izvršavajući izračune, dobijamo i, shodno tome, R 2 = 3.3 R 1. Za NCA blizu horizonta ( = 5 ... 10), možemo pretpostaviti da je R 2 = 3 R 1.
Nađimo vrijednost m n m za nosivu frekvenciju f = 1600 MHz navigacijskog radio signala. U srednjim geografskim širinama u najtežoj sezoni (zimski dan) u godinama maksimalne sunčeve aktivnosti, maksimalna koncentracija elektrona na visinama od 300 ... 400 km može dostići N = 3.0 610 6 el / cm 3, a shodno tome za f = 1.6 10 6 kHz dobijamo
M n m = 3.8 10 -5, R 1 = 15 m, R 2 = 45 m.
Noću i ljeti, ionosferske greške će biti nekoliko puta manje. U godinama minimalne sunčeve aktivnosti, jonosferske greške čak i zimskog dana su 5 ... 6 puta manje od maksimalnih gore navedenih.
Razmotrićemo perspektivu kada će NKA druge modifikacije raditi u sistemu GLONASS, koji će emitovati dvokomponentni navigacioni radio signal od 1250 MHz umesto jednokomponentnog radio signala od 1250 MHz u NKA prve modifikacije. U skladu s tim, moguće je mjeriti navigacijske parametre u dvo-pojasnom NAP-u korištenjem uskopojasnih radio-signala od 1600 MHz i 1250 MHz kako bi se eliminirale pogreške mjerenja ionosfere. Međutim, sa dvostrukim pseudodenzionim merenjem, greške buke i greške zbog višestaznog protoka značajno će se povećati u poređenju sa jedno-pojasnim NAP-om (1600 MHz). Na dinamičkim objektima s ne-determinističkim modelom pokreta (T 0 = 1 s) nije preporučljivo koristiti dvo-pojasne uskopojasne radio signale od 1600 MHz i 1250 MHz za određivanje koordinata objekta, jer u ovom slučaju, kao što je prikazano gore:
1. Pseudo-šumske greške do NC-a blizu horizonta će biti sastav (S 2) = 12 ... 22 m, tj. će premašiti jonosferske greške u jedno-pojasnom NAP-u tokom najgore sezone (zimski dan);
2. pseudo-dometne greške u blizini horizonta NCA zbog višestaznog signala će biti S (S 2) = 9 m (u najgorem stanju), tj. će biti proporcionalne sa jonosferskim greškama u jedno-band NAP-u tokom najgore sezone (zimski dan).
Na nisko-dinamičkim zemaljskim objektima, preporučljivo je koristiti dvo-pojasne uskopojasne navigacijske radio signale, budući da je u NAP-u na nisko-dinamičkim objektima moguće prosječno mjeriti rezultate duže vrijeme (T 0 = 30 s) i smanjiti na potreban nivo buku pseudo-raspona i pogreške zbog višestaznog.
Struktura navigacionih radio signala u sistemu GLONASS
U sistemu GLONASS, svaki regularni NCA u ispušnom gasu konstantno emituje zvučne kontinualne navigacijske radio signale u dva frekventna opsega od 1600 MHz i 1250 MHz. U NAP-u, navigacijska mjerenja u dva frekvencijska područja omogućuju isključivanje pogrešaka mjerenja ionosfere.
Svako nacionalno nadležno tijelo ima cezijum ASD koji se koristi za formiranje skale na brodu (BSV) i radio navigacijske signale od 1600 MHz i 1250 MHz.
Zvučni navigacijski radio signali u NKA-inom OC-u ispušnih plinova razlikuju se po frekvencijama nosača. Budući da se iste nosive frekvencije mogu koristiti za međusobno antisatelitske NRA u orbitalnim ravninama, minimalni potreban broj nosivih frekvencija u svakom frekvencijskom rasponu je 12 za 24 satelita. u području radio vidljivosti zemlje korisnik ne može istovremeno biti međusobno antipodalni NCA. Potrošač u svemiru može istovremeno „vidjeti“ međusobno antisatelitske nadležne agencije. Međutim, postoje dvije povoljne okolnosti.
Prvi je da će barem jedno od dva međusobno antisatelitska nadležna nadležna tijela biti ispod lokalnog horizonta u odnosu na svemirskog potrošača. Praktično je nemoguće koristiti jednu široko usmerenu antenu na svemirskom objektu sposobnom za prijem navigacionih radio signala sa svih "vidljivih" satelita iznad i ispod lokalnog horizonta. Stoga u NAP-u na svemirskom objektu koriste: ili jednu široku usmerenu antenu za prijem navigacionih radio signala sa satelita, koja se nalazi iznad lokalnog horizonta; ili nekoliko antena i nekoliko prijemnika za prijem navigacionih radio signala iz NCA, koji se nalaze iznad i ispod lokalnog horizonta.
U obe varijante, NAP na svemirskom objektu će sprovesti efikasnu prostornu selekciju navigacionih radio signala iz međusobno antisatelitskih satelita.
Druga okolnost je da NAP u navigacionom sesiji traži frekvenciju nosioca svakog primljenog radio-navigacijskog signala unutar uskog pojasa (~ 1 kHz) u blizini predviđene vrijednosti, uzimajući u obzir dopler-pomak nosive frekvencije. Doppler pomak može imati maksimalne vrijednosti od 5 kHz u NAP-u na zemaljskim objektima i 40 kHz u NAP-u na nisko-orbitalnim svemirskim objektima. Shodno tome, u NAP-u na svemirskom objektu provodi se djelotvorna Doppler izbor navigacijskih radio signala iz radio-vidljivog satelita.
Tako će se navigacijski radio signali međusobno antisatelitskog satelita s istim frekvencijama nosioca pouzdano razdvojiti u NAP-u na svemirskom objektu zbog prostorne i Dopplerove selekcije.
Radio-signal za navigaciju od 1600 MHz je dvokomponentan. Na datoj frekvenciji nosioca, u radio-predajniku se formiraju dva jednako snažna šumna faza-manipulisana radio-signala za navigaciju "u kvadraturi" (međusobni fazni pomak od 90): uskopojasni i širokopojasni.
1600 MHz uskopojasni navigacioni radio signal generiše se manipulacijom faze nosioca 180 periodične binarne pseudoslučajne sekvence (PSP1) sa taktnom frekvencijom F 1 = 0,511 MHz i periodom ponavljanja T 1 = 1 ms (511 ciklusa). PSP1 je M-slijed s karakterističnim polinomom 1 + X 3 + X 5. Invertovanjem PSP1, emituje se vremenska oznaka (MB) vremenske skale (BSV) NKA i binarnih simbola digitalnih informacija (DI). Vremenska oznaka traje 0.3 s i prenosi se na kraju svakog vremenskog intervala od dva sekunda (na kraju parnih sekundi). Vremenska oznaka sadrži 30 binarnih simbola u trajanju od 10 ms i predstavlja 31-znakovni M-slijed skraćen za jedan simbol.
U svakoj liniji od dvije sekunde na vremenskom intervalu od 1,7 s prenose se 85 binarnih simbola DI, u trajanju od 20 ms i pomnoženih meandrom u trajanju od 10 ms. Granice simbola meandra, MB i QI su koherentne. U prijemniku, koristeći meandar, vrši se simbolička sinhronizacija za MV i uz njenu pomoć case mala slova i simbolička sinhronizacija QI.
Širokopojasni navigacioni radio-signal od 1600 MHz generiše se manipulacijom faze nosioca na 180 periodičnoj binarnoj sekvenci PSP2 sa taktnom frekvencijom F2 = 5.11 MHz. Invertovanjem PSP2, binarni simboli QI sa trajanjem od 20 ms se prenose.
Radio-signal navigacije od 1250 MHz emitovan od strane NKA prve modifikacije je jednokomponentni širokopojasni šumski radio signal koji se formira manipulacijom fazom oscilacije nosioca za 180 periodični binarni PSP2 (F2 = 5.11 MHz) bez invertovanja, tj. bez prenošenja QI. Radio-signal navigacije od 1250 MHz emitovan od strane NKA druge modifikacije će sadržavati dva jednako snažna radio-signala kao što je 1250 MHz u kvadraturi:
1. uskopojasni navigacioni radio signal 1250 MHz sa PSP1 (F 1 = 0,511 MHz, T 1 = 1 ms);
2. 1250 MHz širokopojasni navigacijski radio signal sa PSP2 (F 2 = 5,11 MHz) bez DI.
Budući da je frekvencija invertovanja memorijskog opsega mnogo manja od frekvencije sata, širina glavnog "režnja" omotača spektra snage buke kao što je radiofrekventni navigacijski radio-signal jednaka je dvostrukoj frekvenciji sata memorije. Shodno tome, širina glavnog „režnja“ omotača spektra snage uskopojasnog radio-signala navigacije je 1.022 MHz, širokopojasni .2 10.22 MHz.
Prilikom projektovanja GLNASS SRNS, razvijena je sljedeća "mreža" nazivnih vrijednosti nosivih frekvencija za navigacijske radio signale u dva frekvencijska pojasa 1600 gornji 1600 MHz (V) i niži 1250 MHz (N):
K vk = 0 v0 + k u; 0 v0 = 1602.0000 MHz;
= = U = 0.5625 MHz;
K nk = 0 n0 + k n; = N0 = 1246,0000 MHz;
= n = 0,4375 MHz;
/ VK / = nk = 9/7;
gdje je k uvjetni redni broj para nosivih frekvencija and vk i k nk za navigacijske radio signale od 1600 MHz i 1250 MHz.
Radio predajnici navigacijskih radio signala u NCA prve modifikacije emituju navigacijske radio signale na preklopivim nosivim frekvencijama s brojevima k = 1, ..., 24.
Prikazane su vrijednosti ekstremnih nosivih frekvencija navigacijskih radio signala:
1 B1 = 1602.5625 MHz; 24b24 = 1615,5000 MHz;
1 N1 = 1246.4375 MHz; 24 n24 = 1256.5000 MHz;
Radni spektri radio-navigacionih signala na nosivim frekvencijama sa brojevima k = 1, ..., 24 zauzimaju frekvencijske opsege:
a) uskopojasni navigacijski radio signali 1602.0 ... 1616.0 MHz;
b) širokopojasni navigacijski radio signali 1597.4 ... ... 1620.6 MHz, 1241.3 ... 1261.6 MHz.
U frekvencijskom opsegu od 1600 MHz i 1250 MHz, prema Pravilniku o radiju, raspodjeljuju se frekvencijski opsezi:
a) za satelitsku radio komunikaciju (Cosmos) Earth) 1559.0 ... 1610.0 MHz; 1215.0 ... 1260.0 MHz;
b) za avionsku radionavigaciju, 1559.0 ... 1626.5 MHz.
VAKR-87 je rasporedio frekventni opseg 1610,6 ... 1613,8 MHz za radio astronomiju na primarnoj osnovi. U cilju smanjenja i potpunog eliminisanja radio smetnji sa radio-teleskopima u frekventnom opsegu 1610,6 ... 1613,8 MHz od radio-signala navigacije sistema GLONASS, administracija GLONASS usvojena je 1993. godine. Odluka prema kojoj će se za 24 pune veličine satelita u sistemu GLONASS koristiti sljedeći brojevi (k) nosivih frekvencija:
1. prije 1998. k = 1, ..., 15; k = 21, ..., 24;
2. Od 1998. do 2005., k = 1, ..., 12;
3. od 2005, k = -7, ..., 4.
U prvoj fazi (do 1998. godine) praktično ne postoji spektar uskopojasnih navigacijskih radio signala od 1600 MHz u radio-astronomskom opsegu, a do 2005. godine radio-signali širokopojasne navigacije će također biti izvedeni iz radio-astronomskog opsega. Treća faza će biti implementirana korištenjem NFA druge modifikacije, u kojoj odašiljači navigacijskih radio signala mogu emitirati navigacijske radio signale na bilo koji par promjenjivih nosivih frekvencija s brojevima k = -7.0, ... + 12.
NAVSTAR sistem koristi kontinualne navigacione radio signale sa šumom na dve frekvencije nosioca (gornji i donji)
= U = 1575,42 MHz; = n = 1227,6 MHz,
i kodna podjela radio-signala navigacije se primjenjuje za 24 NCA-e s punim radnim vremenom.
Navigacijski radio signal na gornjoj nosivoj frekvenciji u je dvokomponentan, sadrži dva fazno pomaknuta šumska navigacijska radio signala u kvadraturi (fazni pomak 90): uskopojasni i širokopojasni.
Uski tračni navigacioni radio signal is B formira se manipulacijom fazom oscilacije nosioca na 180 P periodičnom SRP1 sa taktnom frekvencijom F 1 = 1.023 MHz i sa periodom ponavljanja T 1 = 1 ms. Binarni simboli DI sa trajanjem od 20 ms se prenose obrtanjem PSP1.
Širokopojasni navigacioni radio-signal is B formira se manipulacijom fazom oscilacije nosioca na 180 periodičnom PSP2 sa taktnom frekvencijom F2 = 10.23 MHz. Binarni simboli DI sa trajanjem simbola od 20 ms prenose se obrtanjem PSP2.
Navigacijski radio signal n je jednokomponentni, širokopojasni, formiran manipulacijom faze oscilacije nosača za 180 periodični PSP2 bez invertovanja.
Širokopojasni navigacijski radio signali u sistemima NAVSTAR i GLONASS namijenjeni su za korištenje od strane ovlaštenih korisnika i zaštićeni su od neovlaštenog korištenja.
Uskopojasni navigacioni signali u sistemima NAVSTAR i GLONASS su otvoreni i namijenjeni su civilnim potrošačima. Ali u sistemu NAVSTAR, ovi signali su umjetno iskrivljeni korištenjem postupka selektivnog pristupa, što pogoršava točnost navigacije za nelicencirane potrošače.
Tačnost globalne navigacije zemaljskih pokretnih objekata
Procenićemo tačnost određivanja koordinata prizemnog mobilnog objekta tokom globalne operativne navigacije pomoću višekanalnog NAP-a koristeći uskopojasni navigacioni radio signal sa frekvencijom od 1600 MHz u sistemu GLONASS sa punim OG standarda NKA.
Pogreška u određivanju koordinata objekta koji se kreće zavisi od geometrijskih faktora koji se koriste u navigacijskoj sesiji konstelacije radio-vidljivih NFA i zbog grešaka EI i PNC u QI okvirima primljenim od NKA, kao i grešaka mjerenja u NAP pseudorangama na NDA.
Prilikom procene tačnosti koordinata pokretnog objekta, greške EI i PNC-a mogu se preračunati u ekvivalentne greške pseudoranganda do NFA.
Pogreške koordinata NCA, pretvorene u ekvivalentne greške pseudonange, su projekcije grešaka koordinata NCA u pravcu od NCA do objekta. Označavamo: of greške NCA koordinata u vertikalnoj i horizontalnoj ravni. Sljedeće formule mogu se dobiti iz jednostavnih geometrijskih konstrukcija za preračunavanje pogrešaka NCA koordinata u ekvivalentne greške pseudorangela (udaljenosti) od objekta prema NCA:
1. za NCA sa skoro zenitom
S 1 = 1 H 1 sa ;
S 1 = + H 1 + 0,15 1 M 1 sa 45;
2. za NCA blizu horizonta
2 S 2 = + H 2 + 0,25 2 M 2 sa 0 2 0.
EI greške za dnevnu prognozu za NCA prve modifikacije (vidi gore) su u prosjeku H (H) = 4 m, L (L) = 15 m, i, prema tome, ekvivalentne greške pseudorange su:
S (S 1) = 4,0 ... 4,6 m i S (S 2) = 5,5 m.
Nesigurnost ATP-a u 12-satnoj prognozi za NCA prve modifikacije je B = 14 ns i, shodno tome, ekvivalentna pseudo-dometna greška je ravna) S) = 4,2 m.
Kada se koriste uskopojasni navigacijski radio signali, gore navedene su pogreške pseudorange mjerenja za blizine zenita 1 S 1) i blizu horizontale 2 S 2) NKA.
Napravimo ukupan budžet pseudo-dometnih grešaka bez jonosfere (koja će se nazvati instrumentalna pseudo-dometna greška) za višekanalni NAP koristeći uskopojasne jednosmjerne (1600 MHz) radio signale (T 0 = 1 s):
U šest-kanalnom NAP-u na zemaljskom pokretnom objektu, maksimalne (0,95) instrumentalne greške u određivanju lokacije objekta u horizontalnoj p i vertikalnoj z ravnini povezane su s instrumentalnim pseudodometnim greškama na „visoki“ (blizu zenit) NFA 1 (S 1) i na „niski“ (skoro-horizontalni) ) NCA S (S 2) kako slijedi (vidi gore):
u najboljim situacijama = p = 2.0 (S 2); = Z = 2,0 (a);
u najgorim situacijama = p = 2.2 (S 2); = Z = 2.2 (a),
(a) = 1/2.
Koristeći ove formule i vrijednosti pseudo-opsega instrumentalne greške, dobijene gore, nalazimo procjene maksimalnih instrumentalnih grešaka u određivanju lokacije dinamičkih (T 0 = 1 s) objekata pomoću uskopojasnih navigacijskih radio signala u jednokanalnom šestokanalnom NAP (1600 MHz):
1. u najboljim situacijama S (S 1) = 6,2 m; S (S 1) = 7,7 m, odnosno, p = 15,4 m; = Z = 34 m;
2. u najgorim situacijama S (S 1) = 6,6 m; S (S 1) = 9,6 m, odnosno p = 21 m; = Z = 42 m.
Stroga procena doprinosa jonosferskih grešaka u određivanju koordinata prizemnog objekta kada se koristi jedno-pojasni NAP je prilično težak zadatak, dajemo približnu analizu.
U prethodnom odeljku smo procenili jonosferske greške merenja pseudorangela u jedno-pojasnom NAP-u. Pokazano je da je ionosferska greška pseudorange (opsega) prema horizontalnom NCA ( = 5 10) jednaka 2 R 2 = 3 R 1, pri čemu je is R 1 jonosferska greška opsega sa vertikalnim radio snopom. Ionosferske greške pseudorangana u sesiji zavise od vremena sesije: minimalne noću, maksimalno u podne.
Neka prizemni objekt bude pod presjekom dva orbitalna prstena, au navigacijskom sesiji koristi se šest nacionalnih nadležnih tijela: dva blizu zenita i četiri blizu horizontalna. Očigledno, ako se navigacijska sesija odvija oko podneva, tada će se jonosferske greške pseudorangana za satelit u blizini horizonta neznatno razlikovati jedna od druge i, prema tome, četiri razlike između pseudongaže i horizontalne i satelitske NAC će biti približno iste = D = 2 R 2-= R 1 = 2 R 1. U ovoj situaciji, jonosferske greške u određivanju koordinata prizemnog objekta u sesiji navigacije u podne mogu se procijeniti kao
= Z = 2D = 4R1; , X, = y = 0.5 D = R 1.
Ako se navigacijska sesija održava ujutro ili navečer, ionosferske greške pseudorange do skoro horizontalnih satelitskih satelita će biti vrlo različite, a za takve navigacijske sesije, jonosferske koordinate koordinata mogu se približno procijeniti kao:, x,, y, = z = 2 1 R 1, gde je is R1 jonosferska greška pseudo-dometa do protuzrakoplovnog satelita tokom dana.
Ako je prizemni objekt podjednako udaljen od tri orbitalna prstena, onda u navigacijskoj sesiji nema blizu zenita NCA, a “high” NCA ima uglove elevacije 1 = 41 ... 45. Ionosferske greške u određivanju koordinata prizemnog objekta u takvoj navigacijskoj sesiji neće biti više nego na sesiji u kojoj se nalazi skoro zenitni NCA.
Dakle, u navigacijskim sesijama zemaljskih objekata koji koriste šest-kanalni jedno-pojasni NAP, maksimalne jonosferske pogreške u određivanju koordinata objekta mogu se procijeniti na sljedeći način:
, X, = y = (1 ... 2) 1 R 1; = Z = (2 ... 4) 1 R 1,
gde je is R 1 jonosferska greška sa vertikalnim radio snopom u toku dana.
U najtežoj sezoni (zimski dan) u godinama maksimalne solarne aktivnosti 1 R 1 = 15 m. Stoga će maksimalne jonosferske greške u određivanju lokacije prizemnog objekta biti
= P = [(x x) 2 + () y) 2] 1/2 = 21 ... 42 m; = Z = 30 ... 60 m.
Dobijene procene maksimalnih ukupnih (instrumentalnih i jonosferskih) grešaka globalne navigacije u SRNS GLONASS-u korišćenjem uskopojasnih navigacionih radio signala od 1600 MHz u šest-kanalnom NAP-u na dinamičnim (T 0 = 1 s) zemaljskim objektima tokom godina maksimalne sunčeve aktivnosti:
U godinama minimalne sunčeve aktivnosti, jonosferske greške će biti 5 ... 6 puta manje, te će u skladu s tim maksimalne ukupne greške globalne navigacije zemaljskih mobilnih objekata biti:
GLONASS satelit
GLONASS satelit konstruktivno se sastoji od cilindričnog hermetičkog kontejnera sa instrumentnim blokom, okvira antena-napojnih uređaja, instrumenata orijentacionog sistema, solarnih panela sa pogonima, bloka pogonskog sistema i rešetke termalnog kontrolnog sistema sa pogonima. Optički kutni reflektori su takođe instalirani na satelitu, dizajnirani za kalibraciju radio signala mjernog sistema mjerenjem udaljenosti do satelita u optičkom opsegu, kao i za preciziranje geodinamičkih parametara satelitskog pokretnog modela. Strukturno, kutni reflektori se formiraju u obliku bloka koji konstantno prati smjer prema središtu Zemlje. Površina kutnih reflektora je 0,25 m2.
Oprema na brodu uključuje:
· Navigacijski kompleks;
· Kompleks upravljanja;
· Sistem orijentacije i stabilizacije;
· Sistem korekcije;
· Sistem termalne kontrole;
· Sistem napajanja.
Navigacioni sistem obezbeđuje funkcionisanje satelita kao elementa sistema GLONASS. Kompleks obuhvata: sinhronizator, vozač navigacionih radio signala, putni računar, prijemnik navigacionih informacija i predajnik navigacionih radio signala.
Sinhronizator omogućava izdavanje visoko stabilnih frekvencija sinhronizacije na brodskoj opremi, formiranje, skladištenje, korekciju i izdavanje vremenske skale na brodu.
Oblikovač navigacionih radio signala omogućava formiranje pseudo-slučajnih faza manipulisanih navigacionih radio signala koji sadrže kod za određivanje dometa i navigacijsku poruku.
Kontrolni kompleks obezbeđuje kontrolu satelitskih sistema i kontroliše ispravnost njihovog funkcionisanja. Kompleks obuhvata: komandno-merni sistem, kontrolnu jedinicu na brodu i telemetrijski sistem nadzora.
Komandno-merni sistem obezbeđuje merenje rastojanja u režimu upita, kontrolu vremenske skale, kontrolu sistema jednokratnim komandama i vremenskim programima, snimanje navigacionih informacija u brodskom navigacionom kompleksu i telemetrijski prenos.
Kontrolna jedinica omogućava distribuciju snage na sisteme i instrumente satelita, logičku obradu, reprodukciju i pojačavanje jednokratnih komandi.
Sistem za orijentaciju i stabilizaciju smiruje satelit nakon odvajanja od startnog vozila, početnu orijentaciju solarnih panela prema Suncu i uzdužnu os satelita prema Zemlji, zatim orijentaciju uzdužne osi satelita do centra Zemlje i ciljanje solarnih baterija na Sunce, te stabilizaciju satelita tokom korekcije orbite . Sistem koristi uređaj zasnovan na infracrvenoj konstrukciji lokalne vertikale (za orijentaciju na centar Zemlje) i uređaj za orijentaciju prema suncu. Pogreška orijentacije prema centru Zemlje nije lošija od 3 stepena, a odstupanje normale od površine solarne baterije od pravca prema Suncu nije veće od 5 stepeni. Da bi se smanjili poremećaji u centru pokreta satelita, motori zamajca se istovaruju pomoću magnetnog jezgra. Pogonski sistem se koristi kao izvršni organ u sprovođenju smirenja i stabilizacije satelita tokom izdavanja korekcijskog impulsa.
Režim mirnog rada, kao rezultat toga dolazi do gašenja kutne brzine, aktivira se u zoni radio vidljivosti.
U početnoj orijentaciji prema Suncu, satelit se rotira u odnosu na uzdužnu osu pomoću upravljačkih motora-zamašnjaka sve dok se Sunce ne pojavi u vidnom polju uređaja za usmjeravanje prema Suncu, koji je instaliran na solarnom panelu.
Režim orijentacije na Zemlji počinje od položaja orijentacije na Suncu okretanjem satelita uz pomoć motornih zamašnjaka uzduž osi orijentirane na Sunce, sve dok se Zemlja ne pojavi u vidnom polju uređaja za orijentaciju u središtu Zemlje. U normalnom režimu, satelitska osa je orijentisana uz antene prema središtu Zemlje koristeći kontrolne zamajce prema signalima od orijentacionih instrumenata do centra Zemlje, solarni paneli su orijentisani prema Suncu rotiranjem satelita zajedno sa solarnim baterijama koristeći jedan upravljački motor zamajca i okreće se paneli baterija u odnosu na telo satelita uz pomoć rotacionog pogona solarnih baterija duž drugog kanala signalima od uređaja za usmjeravanje do Sunca.
U režimu orijentacije, prije korekcije i stabilizacije satelita tijekom izdavanja korekcijskog impulsa, ne izvodi se orijentacija prema Suncu.
Sistem korekcije osigurava da je satelit doveden na unaprijed određenu poziciju u orbitalnoj ravnini i drži se unutar zadanih granica argumenta geografske širine. Sistem uključuje pogonski sistem i upravljačku jedinicu za njega. Pogonski sistem se sastoji od 24 motora orijentacije s potiskom od 10 g i dva motora za korekciju s potiskom od 500 g
Sistem termalne kontrole obezbeđuje potreban termalni režim rada satelita. Toplota koja se uklanja iz hermetičkog kontejnera kontrolira se rešetkama koje otvaraju ili zatvaraju površinu zračenja u zavisnosti od temperature gasa. Toplina se uklanja iz uređaja cirkulacijom gasa pomoću ventilatora.
Sistem napajanja uključuje solarne baterije, punjive baterije, automatizaciju i jedinicu za stabilizaciju napona. Početna snaga solarnih panela je 1600 W, površina je 17,5 m2.
Kada satelit prolazi kroz sekcije senki Zemlje i Mjeseca, onboard sistemi se napajaju punjivim baterijama. Njihov kapacitet pražnjenja je 70 amper-sati.
Da bi se osigurala pouzdanost satelita, instalirana su dva ili tri seta glavnih brodskih sistema.
Tako GLONASS satelit ima sledeće funkcije:
· Zračenje visoko stabilnih radio navigacijskih signala;
· Prijem, pohranjivanje i prijenos digitalnih navigacijskih informacija;
· Formiranje, digitalizacija i prenos preciznih vremenskih signala;
· Retransmisija ili emisija signala za mjerenje trajektorije za praćenje orbite i određivanje korekcija vremenske skale u zraku;
· Prijem i obradu jednokratnih naredbi;
· Prijem, memorisanje i izvođenje privremenih programa za kontrolu načina rada satelita u orbiti;
· Generisanje telemetrijskih informacija o stanju na brodu opreme i njenom prenosu za obradu i analizu na terenski kontrolni kompleks;
· Prijem i izvršenje kodova / komandi za korekciju i faziranje vremenske skale na brodu;
· Formiranje i prenos "znaka kvara" kada su kritični nadzirani parametri izvan normalnog raspona.
GLONASS sateliti se automatski kontrolišu.
GLONASS satelite stavlja se u orbitu od strane nosioca teške klase "PROTON" sa gornje etape sa kosmodroma Baikonur. Nosač istovremeno prikazuje tri GLONASS satelita.
Šema zaključivanja uključuje:
• Lansiranje prostorne glave u srednju kružnu orbitu visine ~ 200 km;
· Prelazak na eliptičnu orbitu sa perigejem od 200 km, apogejem od ~ 19.100 km i nagibom od 64.3 stepeni.
Svaki satelit se prenosi na određenu tačku na orbitalnoj ravni koristeći satelitski pogon.
Tačnost redukcije na radnu tačku orbite:
· Po periodu cirkulacije - 0,5 s;
· Na argumentu geografske širine - 1grad;
· Ekscentričnost - ~ 0,01;
· Na nagibu orbite - ~ 0.3 stepeni.
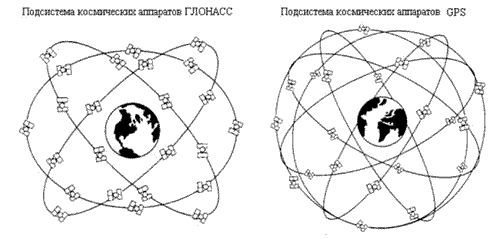
Prostorni segment GLONASS i GPS sistema
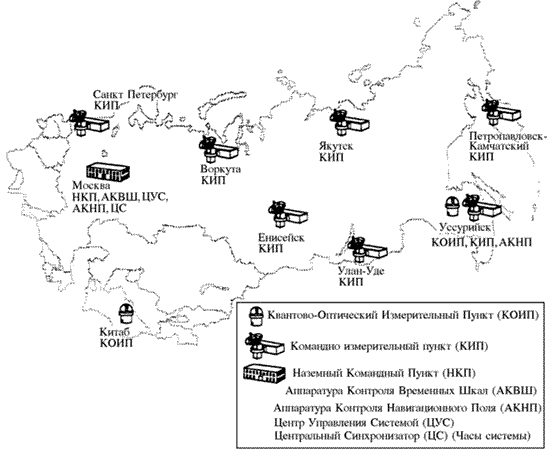
Struktura radija GPS navigacije
GPS sistem koristi signale podjele koda (CDMA), tako da svi sateliti emitiraju signale s istom frekvencijom. Svaki GPS satelit emituje dva signala s pomakom faze. Frekvencija prvog signala je L1 = 1575,42 MHz, a druga - L2 = 1227,6 MHz. Signal L1 noseće frekvencije moduliran je s dvije binarne sekvence, od kojih je svaka formirana modulo-2 sumiranjem koda rangiranja i emitiranog sistema i navigacijskih podataka generiranih na 50 bit / s. Na frekvenciji L1, prenose se dvije kvadraturne komponente, binarno manipulirane binarnim sekvencama. Prva sekvenca je zbir modula 2 tačnog koda P ili tajnog koda Y i navigacijskih podataka. Druga sekvenca je takođe modula 2 suma grubog C / A (otvorenog) koda i iste sekvence navigacionih podataka.
Radio signal na frekvenciji L2 je bifazno manipuliran samo jednom od dvije prethodno razmatrane sekvence. Izbor modulirajuće sekvence se vrši komandom sa Zemlje.
Svaki satelit koristi C / A i P (Y) kodove udaljenosti koji su svojstveni samo njemu, što omogućava odvajanje satelitskih signala. U procesu formiranja tačnog raspona P (Y) koda istovremeno se generišu satelitske vremenske oznake.
Sastav i struktura navigacijskih poruka GPS satelita
Strukturna podjela navigacijskih informacija GPS satelita vrši se u superframe, okvire, podframe i riječi. Superframe se sastoji od 25 kadrova i traje 750 s (12.5 min). Jedan okvir se prenosi 30 s i veličine je 1500 bita. Okvir je podijeljen u 5 pod-okvira od po 300 bita i prenose se u intervalu od 6 s. Početak svakog pod-okvira označava vremenski žig koji odgovara početku / kraju narednog vremenskog intervala od 6 sekundi GPS sistema. Podcat se sastoji od 10 30-bitnih riječi. U svakoj riječi, 6 najmanje bitnih bitova su kontrolni bitovi.
U 1., 2. i 3. podkarti se prenose podaci o korekcijskim parametrima sata i efemeridnim podacima letjelice s kojom se uspostavlja komunikacija. Sadržaj i struktura ovih podframe ostaju nepromijenjeni na svim stranama superframea. Četvrti i peti podframe sadrže informacije o konfiguraciji i statusu svih sistema svemirskih letjelica, svemirskih letjelica, specijalnih poruka, parametara koji opisuju odnos između GPS vremena i UTC-a, i tako dalje.
Algoritmi za prijem i mjerenje parametara satelitskih navigacijskih signala
Segment korisnika GPS i GLONASS sistema uključuje prijemnike satelitskih signala. Mjerenjem parametara ovih signala riješava se problem navigacije. Prijemnik se može podijeliti na tri funkcionalna dijela:
 dio za radio frekvencije;
dio za radio frekvencije;
digitalni korelator;
procesor
Signal sa izlaza antene-antena prenosi se na radio-frekvencijski deo, a glavni zadatak ovog dela je pojačavanje ulaznog signala, filtera, konvertovanja frekvencije i analogno-digitalne konverzije. Dodatno, radio-frekvencijski dio prijemnika prima taktnu frekvenciju za digitalni dio prijemnika. Iz izlaznog dijela radiofrekvencijskog dijela, digitalni uzorci ulaznog signala ulaze na ulaz digitalnog korelatora.
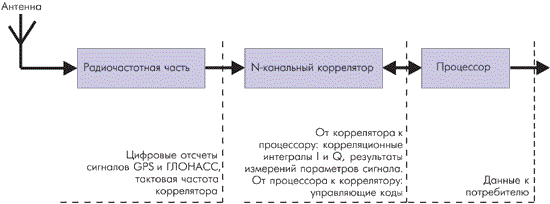
Generalizovana struktura prijemnika
U korelatoru, spektar signala se prenosi na "nultu" frekvenciju. To se postiže množenjem ulaznog signala korelatora sa referentnom harmoničnom oscilacijom u faznim i kvadraturnim kanalima. Zatim, rezultat množenja je korelirana obrada množenjem s referentnim kodom rangiranja i akumulacijom na period koda rangiranja. Kao rezultat, dobijamo korelacione integrale I i Q. Uzorci korelacionih integrala dolaze u procesor za dalju obradu i zatvaranje petlji PLL (fazno zaključane petlje) i CVD (krug za praćenje kašnjenja). Merenje parametara signala u prijemniku se ne vrši direktno iz ulaznog signala, već iz njegove tačne kopije, generisane PLL i CVD sistemima. Korelacioni integrali I i Q omogućuju da se procijeni stupanj „sličnosti“ (korelacija) referentnih i ulaznih signala. Zadatak korelatora, pored formiranja integrala I i Q, je da formira referentni signal, u skladu sa kontrolnim akcijama (kontrolnim kodovima) koje primaju od procesora. Pored toga, kod nekih prijemnika, korelator generiše potrebna merenja referentnih signala i prenosi ih procesoru za dalju obradu. U isto vrijeme, budući da se referentni signali u korelatoru generiraju iz kontrolnih kodova primljenih od procesora, potrebna mjerenja referentnih signala mogu se vršiti direktno u procesoru, obrađujući odgovarajuće kontrolne kodove, što je učinjeno u mnogim modernim prijemnicima.
Koje parametre signala mjeri korelator (procesor)?
Opseg za radio mjerenja karakterizira vrijeme širenja signala od mjernog objekta do mjerne točke. U GPS / GLONASS navigacionim sistemima, emisija signala se sinhronizuje sa vremenskom skalom sistema, točnije, sa vremenskom skalom satelita koji emitira taj signal. Istovremeno, potrošač ima informacije o neslaganju između vremenske skale satelita i sistema. Digitalna informacija koja se prenosi sa satelita vam omogućava da u sistemskom vremenu postavite trenutak emitovanja određenog fragmenta signala (vremenski pečat) satelita. Trenutak prijema ovog fragmenta određen je vremenskom skalom prijemnika. Vremenska skala prijemnika (potrošača) formira se pomoću standarda kvarcne frekvencije, tako da postoji konstantan “odlazak” vremenske skale prijemnika u odnosu na vremensku skalu sistema. Razlika između trenutka prijema fragmenta signala, računanog na vremenskoj skali prijemnika, i trenutka zračenja njegovog satelita, računanog na skali satelita, pomnoženog sa brzinom svjetlosti, naziva se pseudomena. Zašto pseudorange? Zato što se razlikuje od pravog opsega za iznos koji je jednak produktu brzine svetlosti na “odlasku” vremenske skale prijemnika u odnosu na vremensku skalu sistema. Prilikom rješavanja problema navigacije, ovaj parametar se određuje na razini koordinata potrošača (prijemnika).
Korelacioni integrali formirani u korelatoru omogućavaju praćenje modulacije satelitskog signala informacijskim simbolima i izračunavanje vremenske oznake u ulaznom signalu. Vremenske oznake slijede sa frekvencijom od 6 s za GPS i 2 s za GLONASS i čine neku vrstu 6 (2) -druge skale. U granicama jedne podjele ove ljestvice, razdoblja koda raspona formiraju ljestvicu od 1 ms. Jedna milisekunda se dijeli, naizmjenično, na odvojene elemente (čipove, u GPS terminologiji): za GPS - 1023, za GLONASS - 511. Dakle, elementi koda rangiranja omogućuju vam da odredite udaljenost do satelita s pogreškom od "300 m. Za preciznije određivanje neophodno je znati fazu generatora koda raspona. Šeme za konstruisanje referentnih generatora korelatora omogućavaju određivanje njegove faze sa tačnošću od 0,01 perioda, što je tačnost određivanja pseudorange 3 m.
Na osnovu merenja parametara referentne harmoničke oscilacije generisane PLL sistemom, odrediti frekvenciju i fazu oscilacije nosioca satelita. Njegov odlazak u odnosu na nominalnu vrijednost će dati dopler frekvencijski offset, koji se procjenjuje brzinom potrošača u odnosu na satelit. Osim toga, mjerenje faze nosioca omogućava određivanje udaljenosti do satelita s pogreškom od nekoliko mm.
Da bi se odredile koordinate potrošača, potrebno je znati koordinate satelita (najmanje 4) i udaljenost od potrošača do svakog vidljivog satelita. Da bi potrošač odredio koordinate satelita, navigacioni signali koje emituju oni su modelirani porukama o parametrima njihovog kretanja. U opremi potrošača, ove poruke su istaknute i koordinate satelita se određuju u pravo vrijeme.
Koordinate i komponente vektora brzine se veoma brzo mijenjaju, tako da poruke o parametrima kretanja satelita ne sadrže informacije o njihovim koordinatama i komponentama vektora brzine, već informacije o parametrima nekog modela koji aproksimira putanju kretanja letjelice u dovoljno dugom vremenskom intervalu (oko 30 minuta). Parametri aproksimativnog modela variraju prilično sporo i mogu se smatrati konstantama u intervalu aproksimacije.
Parametri aproksimirajućeg modela uključeni su u poruke satelitske navigacije. GPS sistem koristi Kepler-ov model pokreta s osculirajućim elementima. U ovom slučaju, putanja leta letjelice je podijeljena na aproksimacijske segmente trajanja od jednog sata. U centru svake sekcije, postavlja se čvorna tačka vremena, čija se vrednost prenosi potrošaču informacija o navigaciji. Osim toga, potrošač se informira o parametrima modela oscilirajućih elemenata u nodalnoj točki vremena, kao io parametrima funkcija koje aproksimiraju promjene parametara modela oscilirajućih elemenata u vremenu i prije i poslije nodalnog elementa.
U opremi potrošača određuje se vremenski interval između trenutka u kojem će se odrediti položaj satelita i odrediti trenutni trenutak. Zatim, koristeći aproksimirajuće funkcije i njihove parametre izvučene iz navigacijske poruke, vrijednosti parametara modela osculirajućih elemenata izračunavaju se u željeno vrijeme. U poslednjoj fazi, koordinate i komponente vektorskog vektora satelita određuju se korišćenjem uobičajenih Keplerovih modela.
U Glonass sistemu, diferencijalni modeli pokreta se koriste za određivanje tačne pozicije satelita. U ovim modelima, koordinate i komponente vektora brzine satelita određuju se numeričkom integracijom diferencijalnih jednadžbi kretanja letilice, uzimajući u obzir konačan broj sila koje djeluju na letjelicu. Početni uvjeti integracije su specificirani u nodalnoj točki u vremenu, smještenom u sredini intervala aproksimacije.
Kako je gore navedeno, za određivanje koordinata potrošača potrebno je znati koordinate satelita (najmanje 4) i udaljenost od potrošača do svakog vidljivog satelita, koji se određuje u navigacijskom prijemniku s točnošću od oko 1 m. Za praktičnost, razmotrite najjednostavniji “ravni” slučaj prikazan na slici . 8
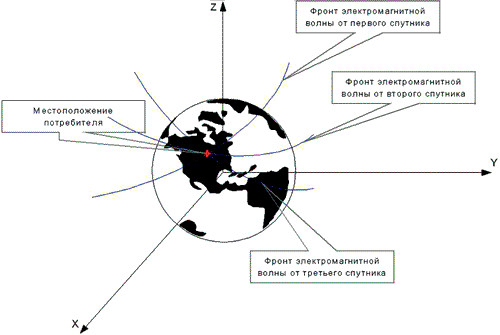
Određivanje koordinata potrošača
Svaki satelit može biti predstavljen kao emiter tačaka. U ovom slučaju, prednja strana elektromagnetnog talasa će biti sferna. Tačka preseka ove dve sfere biće ona u kojoj se nalazi potrošač.
Visina satelitskih orbita je oko 20.000 km. Prema tome, druga ta ~ ka preseka krugova moʻe se odbaciti zbog a priori informacija, jer je daleko u prostoru.
Differential mode
Satelitski navigacioni sistemi omogućavaju potrošačima da dobiju koordinate sa tačnošću od oko 10-15 m. Međutim, za mnoge zadatke, posebno za navigaciju u gradovima, potrebna je veća preciznost. Jedan od glavnih metoda poboljšanja tačnosti određivanja lokacije nekog objekta zasniva se na primjeni načela diferencijalnih navigacijskih mjerenja poznatih u radio navigaciji.
Režim diferencijala DGPS (Diferencijalni GPS) vam omogućava da postavite koordinate sa preciznošću od 3 m u dinamičkom okruženju navigacije i do 1 m u stacionarnim uslovima. Režim diferencijala je implementiran pomoću kontrolnog GPS-prijemnika, zvanog referentna stanica. Nalazi se u tački sa poznatim koordinatama, u istom području kao i glavni GPS prijemnik. Upoređivanjem poznatih koordinata (dobijenih kao rezultat preciznog geodetskog snimanja) sa izmjerenim, referentna stanica izračunava korekcije koje se prenose potrošačima preko zraka u unaprijed određenom formatu.
Oprema potrošača prima diferencijalne korekcije od referentne stanice i uzima ih u obzir prilikom određivanja lokacije potrošača.
Rezultati dobiveni diferencijalnom metodom uvelike ovise o udaljenosti između objekta i referentne stanice. Upotreba ove metode je najefikasnija kada preovladavaju sistematske greške usled spoljašnjih (u odnosu na primaoca) uzroka. Prema eksperimentalnim podacima, preporučuje se da referentna stanica ima ne više od 500 km od objekta.
Trenutno postoje mnogi široki, regionalni i lokalni diferencijalni sistemi.
Takvi sistemi kao što su američki WAAS, evropski EGNOS i japanski MSAS vrede napomenuti kao veliki jaz. Ovi sistemi koriste geostacionarne satelite za prenos korekcija svim potrošačima u njihovoj oblasti pokrivanja.
Regionalni sistemi su namijenjeni za navigacijsku podršku pojedinih područja zemljine površine. Tipično, regionalni sistemi se koriste u velikim gradovima, na autoputevima i plovnim rijekama, u lukama i duž obala mora i okeana. Prečnik radnog područja regionalnog sistema je obično od 500 do 2000 km. Može imati jednu ili više referentnih stanica.
Lokalni sistemi imaju maksimalni domet od 50 do 220 km. One obično uključuju jednu baznu stanicu. Lokalni sistemi su obično podijeljeni prema metodi njihove primjene: morske, zrakoplovne i geodetske lokalne diferencijalne stanice.
Razvoj satelitske navigacije
Opšti pravac nadogradnje GPS i Glonass satelitskih sistema odnosi se na poboljšanje tačnosti definicija navigacije, poboljšanje usluga korisnicima, povećanje životnog vijeka i pouzdanost ugrađene satelitske opreme, poboljšanje kompatibilnosti sa drugim radio sistemima i razvoj diferencijalnih podsistema. Opšti pravac razvoja GPS sistema i Glonass-a je isti, ali su dinamika i postignuti rezultati veoma različiti.
Unapređenje sistema GLONASS planira se na osnovu nove generacije GLONASS-M satelita. Ovaj satelit će imati povećan vijek trajanja i emitovaće navigacijski signal u rasponu L2 za civilne aplikacije.
Slična odluka donesena je iu SAD-u, gdje je 5. januara 1999. objavljeno da će se 400 milijuna dolara izdvojiti za modernizaciju GPS sustava povezanog s prijenosom C / A koda na frekvenciji L2 (1222,7 MHz) i uvođenjem trećeg nosača L3 (1176, 45 MHz) na satelitima koji će biti lansirani od 2005. godine. Signal na frekvenciji L2 je namijenjen za upotrebu u civilne svrhe koje nije direktno povezano s opasnostima po ljudski život. Predlaže se početak primjene ove odluke u 2003. godini. Odlučeno je da se za potrebe civilnog vazduhoplovstva koristi treći civilni signal na frekvenciji L3.
Skraćenice
AKNP - oprema za kontrolu navigacijskog polja
AKS - komandni sistem opreme na brodu
ASC - standardi atomske frekvencije
BIS - mjerna stanica bez zahtjeva
BVK - kompjuterski kompleks na brodu
BNP - brodski navigacijski odašiljač
BTS - ugrađeni telemetrijski sistem
Upravljačka jedinica - upravljačka jedinica
Bukva - kontrolni kompleks u vazduhu
BH - onboard chronizator
BC - balistički centar
BSHV - brodski SHV
GVM - model ukupne težine
SRNS - satelitski navigacijski sustav
NAM - dijagram zračenja
EU QUO - Unified Global Coordinate and Temporary Support System
ZIS - Zahtjev za mjernu stanicu
ZRV - zona radio vidljivosti
KA - letilica
KIS - komandna i mjerna stanica
CBS - kvantno-optičke stanice
CS - kontrolne stanice
LDPS - lokalni diferencijalni podsistem
ICBM - Interkontinentalna balistička raketa
MW - vremenska oznaka
NAP - oprema za navigaciju potrošača
NCA - navigacijski satelit
NKU - zemaljski kontrolni kompleks
NSVT - visoko precizni navigacioni signal
NSST - navigacioni signal srednje preciznosti
OG - orbitalna grupacija
PSP - pseudo-slučajna sekvenca
PKU - podsistemi za nadzor i kontrolu
Strateške raketne snage - strateške raketne snage
SC - sistem korekcije
SCF - fazni kontrolni sistem
Sistem orijentacije i stabilizacije CO
SC - sistem korekcije
BOT - sistem napajanja
FM - fazno prebacivanje
ChVO - vremensko-frekventna podrška
Chvp - vremensko-frekventna korekcija
QI - Digitalne informacije
CA - centralni sinkronizator
NOC je kontrolni centar sistema GLONASS
ŠV - vremenska skala
EI - informacije o efemeridama
EO - medicinska usluga
UTC - koordinirano univerzalno vrijeme
Korištena literatura
1. Radio sistemi. Ed. Kazarinova Yu.M. M: Visoka škola, 1990.
2. Soloviev Yu.A. Satelitski navigacijski sustavi. M: Eco-Trendz, 2000.
3. Globalni satelitski navigacioni sistem GLONASS / Ed. V.N. Harisova, A.I. Perova, V.A. Boldin. M: IPRZHR, 1998.
4. Lipkin I.A. Satelitski navigacijski sustavi. M: Univerzitetska knjiga, 2001.
5. Globalni navigacioni satelitski sistem GLONASS. Kontrolni dokument interfejsa. M .: KNITS VKS, 1995.