Bericht über globale Navigationssatellitensysteme
Das globale Navigationssatellitensystem (GLONASS, Englisch GLONASS) ist ein russisches Satellitennavigationssystem, das den Standort, die Geschwindigkeit und die genaue Uhrzeit einer unbegrenzten Anzahl von Land-, See-, Luft- und Weltraumnutzern bestimmt.
Der Anstoß für den Beginn der praktischen Arbeit auf dem Gebiet der Satellitennavigation war der erfolgreiche Start des ersten künstlichen Erdsatelliten in der UdSSR im Oktober 1957. In den späten 1960er Jahren wurde in der Sowjetunion das Satellitenfunk-Navigationssystem "Cicada" mit geringer Umlaufbahn geschaffen.
Der erfolgreiche Betrieb von Satellitennavigationssystemen mit geringem Orbit durch Meereskunden hat die Satellitennavigation auf breiter Front hervorgerufen. Es bestand die Notwendigkeit, ein universelles Navigationssystem zu schaffen, das die Anforderungen der überwältigenden Anzahl potenzieller Verbraucher erfüllt.
1976 erließ die UdSSR-Regierung ein Dekret über ihre Entwicklung.
Auf der Grundlage von durchgeführten multilateralen Studien wählten inländische Fachleute eine Vollzeit-Orbitalkonstellation von 24 Satelliten aus, die sich auf nahe kreisförmigen Umlaufbahnen auf mittleren Höhen mit einer Nominalhöhe von 19.100 Kilometern befanden.
Am 12. Oktober 1982 wurden Flugtests eines inländischen Orbitalnavigationssystems mit hoher Umlaufbahn (GLONASS) mit dem Start der ersten Glonass-Raumsonde (Cosmos-1413) gestartet. Am 24. September 1993 wurde das System im Interesse des Verteidigungsministeriums der Russischen Föderation mit einer Orbitkonstellation von 12 Satelliten offiziell in Betrieb genommen. Im Dezember 1995 wurde die Orbitalgruppe zu einem festen Stab (24 Satelliten) entsandt, was für die vollständige Abdeckung des gesamten Globus erforderlich ist.
Der Rückgang der Mittel für die Raumfahrtindustrie in den 1990er Jahren führte zur Verschlechterung der Orbitalgruppe von GLONASS. Bis 2002 zählte sie nur sieben Raumsonden, die das russische Territorium nicht mit den Navigationssignalen des GLONASS-Systems versorgen konnten, zumindest bei mäßiger Verfügbarkeit. Die Genauigkeit war dem amerikanischen GPS-Navigationssystem um mehr als eine Größenordnung unterlegen.
Um das System zu erhalten und weiterzuentwickeln, wurden eine Reihe politischer Dokumente vom Präsidenten und der Regierung der Russischen Föderation genehmigt. Das wichtigste davon war das föderale Zielprogramm Global Navigation System für den Zeitraum 2002-2012.
Als Ergebnis der Implementierung wurde die Orbitalgruppierung vollständig wiederhergestellt. Seit 2012 wird das System im Rahmen des neuen föderalen Zielprogramms "Pflege, Entwicklung und Nutzung des GLONASS-Systems für 2012-2020" entwickelt, um sicherzustellen, dass Aufgaben der Koordinierungszeit und der Navigationsunterstützung im Interesse der Verteidigung, der Sicherheit und der Entwicklung des sozioökonomischen Raums des Landes in der Nähe effektiv gelöst werden und entfernte Perspektive.
Das GLONASS-System besteht aus einem Subsystem von Raumfahrzeugen, einem Subsystem von Überwachungs-, Steuerungs- und Navigationsgeräten für Verbraucher.
Die Basis des GLONASS-Systems sind 24 Satelliten, die sich in drei Umlaufbahnen von je acht Fahrzeugen bewegen, die in einem Winkel von 64,8 ° zum Äquator geneigt sind, eine Umlaufbahnhöhe von 19.100 km und eine Umlaufzeit von 11 Stunden, 15 Minuten und 44 Sekunden haben. Die gewählte Struktur der Orbitalgruppierung gewährleistet die Bewegung aller Raumfahrzeuge auf einer einzigen Route auf der Erdoberfläche mit ihrer Frequenz in acht Tagen. Diese Eigenschaften sorgen für eine hohe Stabilität der Orbitalgruppierung des GLONASS-Systems, wodurch praktisch auf die Korrektur der Umlaufbahnen eines Raumfahrzeugs während des gesamten Zeitraums ihrer aktiven Existenz verzichtet werden kann.
Bis zum 10. Oktober 2017 verfügte die Orbitalgruppe von GLONASS über 25 Raumfahrzeuge, von denen 23 für ihren beabsichtigten Zweck verwendet wurden.
Weltraumsatelliten für GLONASS befanden sich in der Stadt Krasnojarsk-26 (Zheleznogorsk).
Die Glonass-Raumsonden waren in Betrieb, mit einer aktiven Garantie von drei Jahren. Derzeit bilden Satelliten der modifizierten Glonass-M-Serie, deren erste im Dezember 2003 startete, die Grundlage der Orbitalkonstellation. Sie unterscheiden sich von Satelliten der ersten Generation mit einer Gewährleistungszeit von sieben Jahren und der Verwendung importierter Komponenten. Es ist geplant, die "Glonass-M" -Satelliten der neuen Generation "Glonass-K" mit einer Lebensdauer von bis zu 10 Jahren zu ersetzen. Das erste Raumfahrzeug dieses Typs wurde 2011 in die Umlaufbahn gebracht, das zweite im Jahr 2014.
Derzeit wird in der JSC "ISS" auch die Entwicklung von fortgeschrittenen Navigationssatelliten, dem Glonass-K der zweiten Stufe, durchgeführt.
Das Monitoring and Control Subsystem (PKU) besteht aus dem GLONASS System Control Center und einem Netzwerk von Mess-, Kontroll- und Überwachungsstationen, die in ganz Russland verteilt sind. Zu den Aufgaben der PKU gehört das Überwachen der korrekten Funktion des Weltraumfahrzeugs, die ständige Verfeinerung der Parameter der Umlaufbahnen und die Ausgabe von Zeitprogrammen, Steuerbefehlen und Navigationsinformationen an die Satelliten.
Consumer-Navigationsgeräte bestehen aus Navigationsempfängern und -verarbeitungsgeräten, die dafür ausgelegt sind, Navigationssignale von GLONASS-Satelliten zu empfangen und ihre eigenen Koordinaten, Geschwindigkeit und Zeit zu berechnen. Consumer-Navigationsgeräte von GLONASS führen anforderungsfreie Messungen von bis zu vier GLONASS-Satelliten durch und empfangen und verarbeiten Navigationsnachrichten. Die Navigationsmeldung beschreibt die Position des Satelliten in Raum und Zeit. Als Ergebnis der Verarbeitung der empfangenen Messungen und empfangenen Navigationsnachrichten werden die drei Koordinaten des Verbrauchers bestimmt, die drei Komponenten des Geschwindigkeitsvektors seiner Bewegung und auch die "Bindung" der Zeitskala des Verbrauchers an die Skala des Zustandsstandards der koordinierten Weltzeit UTC (SU) wird ausgeführt.
Das GLONASS-System ermöglicht die kontinuierliche globale Navigation aller Arten von Verbrauchern mit unterschiedlichen Qualitätsanforderungen für die Navigationsunterstützung durch Verwendung von Standardsignalen (L1) und hoher Genauigkeit (L2) mit einer Wahrscheinlichkeit von 0,95 bei 18 Satelliten und 0,997 bei 24 Satelliten in der Konstellation. Es bezieht sich auf die Dual-Use-Weltraumtechnologie.
Derzeit sind die State Corporation "Roscosmos" sowie die russischen Ministerien und Abteilungen an der Entwicklung des GLONASS-Projekts beteiligt: Verteidigungsministerium, Innenministerium, Rostechnadzor, Verkehrsministerium, Bundesregistrierungsdienst, Ministerium für Industrie und Handel, Russische Norm, Bundesamt für wissenschaftliche Organisationen (FANO).
Der Chef des Bundesamtes für technische Regulierung und Messtechnik (Rosstandart) Alexey Abramov, Russlands Wissenschaftler, arbeitet im Sommer 2017 daran, die Genauigkeit der GLONASS-Navigatoren auf wenige Zentimeter zu erhöhen. Ihm zufolge ist es möglich, die Reichweite eines Zählers zu erreichen (unter günstigen Bedingungen ist es möglich, den Ort eines Objekts mit einer Genauigkeit von 3-5 Metern zu bestimmen).
Im September 2017 stellte der stellvertretende Premierminister Dmitry Rogozin fest, dass das russische GLONASS-System dem amerikanischen GPS doppelt so unterlegen ist. Auf dem Treffen der Kommission des militärisch-industriellen Komplexes hat Präsident Wladimir Putin die Aufgabe gestellt, die Wirksamkeit von GPS und GLONASS zu verbessern und bis 2020 Wettbewerbsindikatoren zu erreichen. Laut Rogozin kann dies dank der Einführung neuer Geräte erreicht werden.
Gemäß einem Erlass des Präsidenten wird russischen und ausländischen Verbrauchern der Zugang zu zivilen Navigationssignalen des GLONASS-Systems kostenlos und uneingeschränkt gewährt.
Seit 1996 wird GLONASS auf Vorschlag der Regierung der Russischen Föderation zusammen mit dem amerikanischen GPS von der International Maritime Organization und der International Civil Aviation Organization eingesetzt.
Moderne Mittel der Satellitennavigation sind in verschiedenen Bereichen des sozioökonomischen Bereichs bereits weit verbreitet und ermöglichen die Navigation von Land-, Luft-, See-, Fluss- und Raumfahrzeugen, das Verkehrsmanagement auf allen Verkehrsarten, die Überwachung von Wert- und Gefahrgütern, die Überwachung der Fischerei in den Hoheitsgewässern. Such- und Rettungsaktionen, Umweltüberwachung; geodätische Vermessung und Standortbestimmung von geographischen Objekten mit einer Zentimetergenauigkeit beim Verlegen von Öl- und Gaspipelines, Stromleitungen, im Bauwesen; Synchronisation in Kommunikationssystemen, Telekommunikations- und Elektrizitätswirtschaft; Lösung grundlegender geophysikalischer Probleme; persönliche Navigation der einzelnen Verbraucher.
Die Satellitennavigation wird bereits in der Landwirtschaft eingesetzt, wo sie von Mähdreschern automatisch verarbeitet wird, und im Bergbau. Das Anwendungsspektrum der Satellitennavigationstechnik wird ständig erweitert.
Das Material basiert auf Informationen aus RIA-News und öffentlichen Quellen.
Während Sonneneruptionen.
Bei geomagnetischen Störungen.
Erklären Sie, was ein GNSS ist.
Erzählen Sie von der Entwicklung der Navigation: "Vom Kompass bis zu Satellitennavigationssystemen (SNA)."
Erläutern Sie die allgemeinen Prinzipien der Satellitennavigation (SN).
Beschreiben Sie die aktuelle SNA-GPS und GLONASS, ihre Komponenten (Weltraum- und Bodensegmente) und Anwendungen.
Teilen Sie mit, welche SNS sich auf den Start vorbereitet oder in der Entwicklung sind (GALLILEO, KOMPASS).
Erklären Sie die SNS-Fehler:
Erzählen Sie die Faktoren, die die Verschlechterung der Positionierungsgenauigkeit beeinflussen.
GNSS.
Satellitennavigation: Konzept, System, Aktion.
GLOBAL Navigationssatellitensystem (GLONASS) - Sowjetisch und Russischauf Anfrage entwickelt. Eines von zwei derzeit funktionierenden globalen Satellitennavigationssystemen. Die Basis des Systems sollten 24 Satelliten sein, die sich über der Oberfläche bewegen in drei Umlaufbahnebenen mit einer Neigung der Umlaufbahnebenen von 64,8 ° und einer Höhe von 19.100 km. Das Messprinzip ähnelt dem amerikanischen Navigationssystem.. Derzeit wird die Entwicklung des GLONASS-Projekts in Angriff genommen (Roscosmos) und OJSC "russisch"
Mit  wie viel Menschheit gibt es, wie viel und wie lässt sich der Standort an Land und auf See, im Wald oder in der Stadt bestimmen? Bis heute muss nicht navigiert werden, wie die alten Reisenden und Navigatoren der Sterne oder der Kompass. Die Radiowellen-Entdeckungsepoche hat die Navigation wesentlich vereinfacht und neue Perspektiven für die Menschheit in vielen Lebens- und Tätigkeitsbereichen eröffnet. Mit der Entdeckung der Möglichkeit, den Weltraum zu erobern, wurde ein großer Durchbruch bei der Bestimmung der Koordinaten eines Objekts auf der Erde erzielt. Künstliche Erdsatelliten sind zu Referenzstationen für die Funknavigation geworden, und heutzutage sind Satellitennavigationssysteme nicht nur für Militärs oder Seeleute verfügbar, sondern auch für normale Menschen, Einzelpersonen und Unternehmen, für die Navigation erforderlich ist.
wie viel Menschheit gibt es, wie viel und wie lässt sich der Standort an Land und auf See, im Wald oder in der Stadt bestimmen? Bis heute muss nicht navigiert werden, wie die alten Reisenden und Navigatoren der Sterne oder der Kompass. Die Radiowellen-Entdeckungsepoche hat die Navigation wesentlich vereinfacht und neue Perspektiven für die Menschheit in vielen Lebens- und Tätigkeitsbereichen eröffnet. Mit der Entdeckung der Möglichkeit, den Weltraum zu erobern, wurde ein großer Durchbruch bei der Bestimmung der Koordinaten eines Objekts auf der Erde erzielt. Künstliche Erdsatelliten sind zu Referenzstationen für die Funknavigation geworden, und heutzutage sind Satellitennavigationssysteme nicht nur für Militärs oder Seeleute verfügbar, sondern auch für normale Menschen, Einzelpersonen und Unternehmen, für die Navigation erforderlich ist.
Konzept: Satellitennavigationssystem
- komplexes elektronisches technisches System, bestehend aus einer Kombination von Boden- und Weltraumausrüstung zur Bestimmung des Standorts (geographische Koordinaten und Höhe) sowie der Bewegungsparameter (Geschwindigkeit und Bewegungsrichtung usw.) für Boden-, Wasser- und Luftobjekte.
System:
Die Hauptelemente des Satellitennavigationssystems:
Orbitalgruppierung
bestehend aus mehreren (von 2 bis 30) Satelliten, die spezielle Funksignale senden; Das Bodenkontroll- und Überwachungssystem, das Einheiten zum Messen der aktuellen Position der Satelliten und zum Übertragen der empfangenen Informationen an sie zum Anpassen von Informationen über Umlaufbahnen umfasst;
Kundenausrüstung erhalten
("Satellitennavigatoren") zur Bestimmung der Koordinaten;
Optional
:
Informationsfunksystem zur Übermittlung von Korrekturen an Benutzer, wodurch die Genauigkeit der Koordinatenbestimmung erheblich verbessert werden kann
Aktion: Das Funktionsprinzip von Satellitennavigationssystemen basiert auf der Messung der Entfernung von der Antenne in der Anlage (deren Koordinaten erhalten werden müssen) zu Satelliten, deren Position mit großer Genauigkeit bekannt ist. Die Positionstabelle aller Satelliten wird als Almanach bezeichnet, den jeder Satellitenempfänger vor Beginn der Messungen haben muss. Normalerweise hält der Empfänger den Almanach seit dem letzten Herunterfahren im Speicher. Wenn er nicht veraltet ist, wird er sofort verwendet. Jeder Satellit sendet in seinem Signal den gesamten Almanach.
Wenn man die Entfernungen zu mehreren Satelliten des Systems unter Verwendung herkömmlicher geometrischer Konstruktionen auf der Grundlage des Almanachs kennt, kann man somit die Position eines Objekts im Raum berechnen. Das Verfahren zum Messen der Entfernung vom Satelliten zur Empfangsantenne basiert auf der Bestimmung der Ausbreitungsgeschwindigkeit von Funkwellen. Um die Möglichkeit der Messung der Laufzeit eines Funksignals zu realisieren, sendet jeder Satellit des Navigationssystems als Teil seines Signals genaue Zeitsignale unter Verwendung einer Atomuhr aus, die genau mit der Systemzeit synchronisiert ist.
Wenn ein Satellitenempfänger in Betrieb ist, wird seine Uhr mit der Systemzeit synchronisiert, und bei weiterem Empfang von Signalen wird eine Verzögerung zwischen der im Signal selbst enthaltenen Strahlungszeit und der Empfangszeit des Signals berechnet. Mit dieser Information berechnet der Navigationsempfänger die Koordinaten der Antenne. Die meisten Navigationsempfänger verwenden den Doppler-Effekt, um Geschwindigkeitsinformationen abzurufen. Durch das Sammeln und Verarbeiten dieser Daten für eine bestimmte Zeitdauer wird es möglich, Bewegungsparameter wie Geschwindigkeit (Strom, Maximum, Durchschnitt), zurückgelegte Strecke usw. zu berechnen. In Wirklichkeit ist das System viel komplexer.
Im Folgenden sind einige Probleme aufgeführt, für deren Lösung spezielle Techniken erforderlich sind:
Das Fehlen von Atomuhren in den meisten Navigationsempfängern. Dieser Nachteil wird normalerweise durch die Anforderung beseitigt, Informationen von mindestens drei (zweidimensionale Navigation in bekannter Höhe) oder vier (dreidimensionaler Navigation) Satelliten zu erhalten; (Bei einem Signal von mindestens einem Satelliten können Sie die aktuelle Uhrzeit mit guter Genauigkeit bestimmen.) Die Heterogenität des Gravitationsfeldes der Erde, die die Umlaufbahnen von Satelliten beeinflusst; Heterogenität der Atmosphäre, aufgrund derer sich die Geschwindigkeit und die Ausbreitungsrichtung der Funkwellen in gewissen Grenzen ändern können; Reflexion von Signalen von Bodenobjekten, die sich besonders in der Stadt bemerkbar macht; Die Unmöglichkeit, Hochleistungssender auf Satelliten zu platzieren, weshalb der Empfang ihrer Signale nur bei direkter Sicht im Freien möglich ist.
Geschichte und Entwicklungsperspektiven.
Die Geschichte der Entwicklung von Satellitennavigationssystemen hat mehr als 40 Jahre. Der Beginn der Entwicklung des heimischen Satellitennavigationssystems (SRNS), wie am häufigsten angenommen wird, war der Start des ersten künstlichen Satelliten der Erde (AES) in der Sowjetunion am 4. Oktober 1957. Auf der Tagung des Rates für Wissenschaft und Technik wurden 1946 zum ersten Mal Äußerungen über die Notwendigkeit, ein solches System zu schaffen, das den Anforderungen vieler Abteilungen entspricht, in den Reden von Spezialisten des Leningrader Wissenschafts- und Forschungsradiotechnischen Instituts gemacht. Mitte der 70er Jahre wurde das Satellitennavigationssystem "Cicada" in der UdSSR und in den 60er Jahren in den USA das Transit-System geschaffen, das später viele Änderungen und technologische Verbesserungen durchmachte. Diese Systeme wurden im Auftrag des Verteidigungsministeriums der Länder entwickelt und waren auf die operationelle globale Navigation von beweglichen Objekten am Boden spezialisiert, aber erst im Dezember 1976 wurde die Resolution des Zentralkomitees der KPdSU und des Ministerrates der UdSSR "Über den Einsatz des vereinten Weltraumnavigationssystems" angenommen. Bei den vorhandenen Satellitennavigationssystemen waren die Verbraucher mit der Genauigkeit der Ergebnisse und der Zeit zur Bestimmung der Koordinaten nicht zufrieden - die Schaffung der nächsten Generation war erforderlich. In der Sowjetunion wurde das Satellitennavigationssystem Anfang der 80er Jahre des letzten Jahrhunderts erfunden. In den USA wurden Satellitennavigationssysteme als GPS und in der UdSSR als GLONASS bezeichnet. Infolgedessen wurde der erste amerikanische Satellit im Februar 1978 und der erste sowjetische Satellit später - am 12. Oktober 1982 - gestartet. Am 24. September 1993 wurde GLONASS offiziell in Betrieb genommen. 1995 bestand ihre Satellitenkonstellation aus 24 Fahrzeugen. Aufgrund unzureichender Finanzierung nahm die Anzahl der Arbeitssatelliten ab. Im August 2001 wurde das föderale Zielprogramm Global Navigation System verabschiedet, wonach eine vollständige Abdeckung des russischen Territoriums geplant war. Anfang 2008 hätte das System Anfang 2010 globale Ausmaße erreicht. Um dieses Problem zu lösen, war geplant, in den Jahren 2007, 2008 und 2009 sechs Trägerraketen zu starten und 18 Satelliten in die Umlaufbahn zu bringen. Bis Ende 2009 sollte die Gruppe wieder 24 Fahrzeuge besitzen. Gleichzeitig wird die Genauigkeit der Standortbestimmung der Benutzer des Systems wie bei GPS 1 bis 5 Meter betragen. Nach Angaben des Zentralforschungsinstituts für Maschinenbau besteht die Orbitalgruppierung des GLONASS-Systems derzeit aus 19 Raumfahrzeugen. 14 davon werden für den vorgesehenen Zweck verwendet, 3 - auf der Stufe des Systemeintritts (sie wurden am 25.09.2008 in Betrieb genommen), 1 - vorübergehend zur Wartung gebracht, 1 - auf der Stufe des Rücktritts aus dem System. Prognosen zufolge werden bis Ende 2008 drei weitere Altgeräte aus dem System genommen.
Das langfristige Entwicklungsprogramm des Weltraumnavigationssystems wird in den folgenden integrierten Stufen implementiert:
Stufe 1
(bis 2003). Halten Sie GLONASS CNS mindestens q  das niedrige Niveau der Starts des Raumfahrzeugs Glonass (Abb.), die Modernisierung der Informationsaustauschschaltung des Bodenkontrollkomplexes, die erweiterte Ausrüstung von Verbrauchern mit Geräten, die Signale von zwei Systemen bedienen: GLONASS und GPS. Entwicklung und Erstellung des Satelliten "Glonass-M".
das niedrige Niveau der Starts des Raumfahrzeugs Glonass (Abb.), die Modernisierung der Informationsaustauschschaltung des Bodenkontrollkomplexes, die erweiterte Ausrüstung von Verbrauchern mit Geräten, die Signale von zwei Systemen bedienen: GLONASS und GPS. Entwicklung und Erstellung des Satelliten "Glonass-M".
Uh  tippen Sie auf 2
(bis 2005) Einsatz einer Orbitalkonstellation mit bis zu 18 Einheiten auf Basis des Satelliten Glonass-M (Abb.) mit einer Masse von 1.415 kg. und das aktive Leben von 7 Jahren, das viel mehr ist als die bisherigen Satelliten der Serie. Übergang zum neuen Frequenzbereich des Navigationssignals. Testen der Technologie der Ephemeridenzeitunterstützung mithilfe von Messungen zwischen Satelliten. Erweiterung der Nomenklatur und der Anzahl der Verbraucher, die an Signalen der GLONASS- und GPS-SPS arbeiten. Entwicklung und Entwicklung eines kleinen Massenraumfahrzeugs Glonass-K.
tippen Sie auf 2
(bis 2005) Einsatz einer Orbitalkonstellation mit bis zu 18 Einheiten auf Basis des Satelliten Glonass-M (Abb.) mit einer Masse von 1.415 kg. und das aktive Leben von 7 Jahren, das viel mehr ist als die bisherigen Satelliten der Serie. Übergang zum neuen Frequenzbereich des Navigationssignals. Testen der Technologie der Ephemeridenzeitunterstützung mithilfe von Messungen zwischen Satelliten. Erweiterung der Nomenklatur und der Anzahl der Verbraucher, die an Signalen der GLONASS- und GPS-SPS arbeiten. Entwicklung und Entwicklung eines kleinen Massenraumfahrzeugs Glonass-K.
Stufe 3
(bis 2010). Einsatz der Standard-Orbitalkonstellation auf Basis eines kleineren, fortschrittlicheren, drucklosen Glonass-K-Satelliten (Abb. Nein, da er nur entwickelt wird) mit einer wesentlich längeren aktiven Lebensdauer von bis zu 10 Jahren, einer geringeren Masse von etwa 700 kg, was doppelt so groß ist weniger als das "Glonass-M". Ausbau der Nutzung der Inter-Satellite-Funkverbindung zur Lösung der Probleme der autonomen Unterstützung der Ephemeridenzeit, der Betriebskontrolle und der Überwachung von Weltraumfahrzeugen zur Gewährleistung der Integrität. Aufbau eines Bodennetzes von Überwachungsstationen für GLONASS CLS und Funktionserweiterungen. Ausrüstung des NAP Consumer Parks mit GLONASS, GPS, Galileo-Signalen.
Die Navigationssatelliten dieser Serie werden entweder durch einzelne Starts der Trägerrakete Soyuz-2 mit der Oberstufe Fregat oder sechs Fahrzeuge in einem Paket mit der Trägerrakete Proton mit der Oberstufe Breeze-M in den Orbit gebracht. Außerdem ist ihr Start in den Orbit mit Hilfe des indischen GSLV-Trägers möglich. So wurde 2004 in Moskau ein Abkommen mit Indien über den Start von zwei Navigationssatelliten in den Jahren 2006–2008 unterzeichnet. Glonass-K-Geräte werden auf der Grundlage einer fortschrittlicheren nicht-hermetischen Plattform erstellt, die laut Experten erhöhte Anforderungen an die Ausrüstung und die Elementbasis stellt, die im freien Raum arbeiten müssen. Möglicherweise sind einige der verwendeten Elemente fremd, aber da das Navigationssystem russisch ist, sollte es hauptsächlich an unseren Elementen, an unseren Geräten, funktionieren. Bis heute wird die technologische Möglichkeit des Einbaus des GLONASS-Navigationsmoduls in Mobiltelefonen entwickelt. Telefone mit GPS-Navigatoren sind bereits vorhanden und in der ganzen Welt verbreitet, auch in Russland. Es gibt bereits eine Reihe von GPS / GLONASS-Empfängern auf dem Markt für Navigationsgeräte - diese werden speziell für Russland hergestellt und sind sehr unterschiedlich einsetzbar.
Experten glauben, dass die Hauptaufgaben in der aktuellen Erholungs- und Entwicklungsphase von GLONASS sind:
Steigern Sie die Zuverlässigkeit und verlängern Sie den Zeitrahmen für den Dauerbetrieb von Glonass-Raumfahrzeugen auf 20 Jahre.
Entwicklung einer Orbitalgruppierung von bis zu 6 Ebenen mit 48 Satelliten, um eine hochgenaue Positionierung im geschlossenen Gelände zu gewährleisten (dieses Programm wurde bereits von den USA übernommen);
Bereitstellung elektronischer Sicherheit und Systemunabhängigkeit;
Erwägen Sie die Möglichkeit, das Rettungssystem von Cospas, die Lage von Atomexplosionen und die Kommunikation zwischen Satelliten, die nur die Nutzlast ersetzt, aus dem "Passagier" -System auszuschließen.
Und vor allem - um sich für die Arbeit dieser Spezialisten zu interessieren, die in der Lage sind, die ganze Wahrheit über GLONASS zu berichten. GLONASS ist eine Priorität aller Weltraumprogramme, denn ohne Russland wird Russland in einigen Jahren wehrlos bleiben. Ohne GLONASS ist eine asymmetrische Reaktion auf die US-Raketenabwehr und andere potenzielle Bedrohungen grundsätzlich nicht möglich. Deshalb fordert der Präsident so schnell wie möglich die Wiederbelebung von GLONASS.
Arbeitsprinzip.
GLONASS-Satelliten senden kontinuierlich zwei Arten von Navigationssignalen aus: Standardgenauigkeits-Navigationssignal (ST) im L1-Band (1,6 GHz) und hochpräzises Navigationssignal (BT) im L1- und L2-Band (1,2 GHz). Die durch das CT-Signal bereitgestellten Informationen stehen allen Verbrauchern dauerhaft und global zur Verfügung. Mit Hilfe von GLONASS-Empfängern können Sie Folgendes bestimmen:
* horizontale Koordinaten mit einer Genauigkeit von 50 bis 70 m (die Wahrscheinlichkeit von 99,7%);
* vertikale Koordinaten mit einer Genauigkeit von 70 m (Wahrscheinlichkeit 99,7%);
* Komponenten des Geschwindigkeitsvektors mit einer Genauigkeit von 15 cm / s (Wahrscheinlichkeit 99,7%)
* genaue Zeit mit einer Genauigkeit von 0,7 µs (99,7% Wahrscheinlichkeit).
Diese Genauigkeit kann durch die Verwendung der Differentialnavigationsmethode und / oder zusätzlicher spezieller Messmethoden erheblich verbessert werden.
Das BT-Signal ist in erster Linie für die Verbraucher des russischen Verteidigungsministeriums bestimmt, und seine unautorisierte Verwendung wird nicht empfohlen. Das Problem der Bereitstellung eines VT-Signals für zivile Verbraucher wird geprüft.
Um die Ortskoordinaten und die genaue Uhrzeit zu bestimmen, müssen Navigationssignale von mindestens 4 GLONASS-Satelliten empfangen und verarbeitet werden. Beim Empfang von Navigationsfunksignalen misst der GLONASS-Empfänger mit bekannten funktechnischen Methoden die Entfernung zu sichtbaren Satelliten und misst deren Geschwindigkeit.
Gleichzeitig mit den Messungen im Empfänger wird eine automatische Verarbeitung von Zeitstempeln und digitalen Informationen durchgeführt, die in jedem Navigationsfunksignal enthalten sind. Digitale Informationen beschreiben die Position eines bestimmten Satelliten in Raum und Zeit (Ephemeriden) relativ zu einer Zeitskala eines einzelnen Systems und in einem geozentrischen kartesischen Koordinatensystem. Außerdem beschreiben digitale Informationen die Position anderer Satelliten des Systems (Almanach) in Form von Kepler-Elementen ihrer Umlaufbahnen und enthalten einige andere Parameter. Die Messergebnisse und die empfangenen digitalen Informationen sind die Ausgangsdaten zum Lösen der Navigationsaufgabe zur Bestimmung der Koordinaten und Bewegungsparameter. Das Navigationsproblem wird im Computergerät des Empfängers mithilfe der bekannten Methode der Methode der kleinsten Quadrate automatisch gelöst. Als Ergebnis der Lösung werden drei Koordinaten des Standorts des Verbrauchers bestimmt, die Geschwindigkeit seiner Bewegung und die Zeitskala des Verbrauchers sind mit der hochgenauen UTC-Skala (Universal Coordinated Time) verknüpft.
GLONASS heute.
Zu den Operating Spacecraft (SC) gehören derzeit elf GLONASS-M-Satelliten (einer wurde 2003 gestartet, zwei im Jahr 2005 und drei im Jahr 2006), mit einer Garantiezeit von 7 Jahren. Diese Satelliten senden im Gegensatz zu den Geräten der Vorgängergeneration bereits zwei Signale für zivile Verbraucher aus, was die Positioniergenauigkeit erheblich verbessern kann.
Gemäß den Anweisungen des Präsidenten der Russischen Föderation sollte 2007 eine Mindestkonstellation von 18 Satelliten eingesetzt werden. Die vollständige Gruppierung von 24 Satelliten gemäß dem föderalen Zielprogramm Global Navigation System sollte 2010 eingeführt werden.
Die GLONASS-M-Satelliten in der Orbitalkonstellation werden mindestens bis 2015 sein. Flugtests mit drucklosen Satelliten der neuen Generation „GLONASS-K“ mit verbesserten Eigenschaften (die Garantiefrist wurde auf 10 Jahre verlängert und die dritte L-Band-Frequenz für zivile Verbraucher) sollten 2009 beginnen. Dieser Satellit ist doppelt so leicht wie sein Vorgänger (etwa 700 kg gegenüber 1415 kg in Glonass-M).
In der Zukunft wird es nach dem Einsatz der Orbitalkonstellation von 24 Satelliten für die Wartung erforderlich sein, eine Gruppe von zwei GLONASS-K-Satelliten pro Jahr auf dem Sojus-Carrier zu starten, was die Betriebskosten erheblich senkt.
Am 29. November 2006 kündigte Verteidigungsminister Sergej Iwanow während seines Besuchs beim RIRT an, dass das GLONASS-System bald für den zivilen Gebrauch verfügbar sein wird.
Am 18. Mai 2007 unterzeichnete der russische Präsident Wladimir Putin ein Dekret, wonach der Zugang zum russischen GLONASS-Navigationssystem für russische und ausländische Verbraucher kostenlos und ohne Einschränkungen möglich ist.
GLONASS-Satelliten werden vom Kosmodrom Plesetsk aus gestartet.
MOSKAU, 9. April - RIA-Nachrichten. Der Start von GLONASS-Navigationssatelliten werde in Zukunft nicht von Baikonur aus erfolgen, sondern vom Kosmodrom Plesetsk auf Sojus-2-Startfahrzeugen, sagte der stellvertretende Kommandeur der russischen Weltraumtruppen Alexander Kvasnikov. „Es ist geplant, schrittweise die Markteinführung des russischen globalen Navigationssystems GLONASS von Baikonur zum Kosmodrom Plesetsk zu starten. Diese Starts sollen auf modernisierten Sojus-2-Trägerraketen durchgeführt werden “, sagte Kvasnikov am Montag in einem internationalen Forum zur Satellitennavigation.
Ihm zufolge wird der Transfer der Starts von Baikonur nach Plesetsk die Unabhängigkeit Russlands hinsichtlich des Starts eines eigenen Raumfahrzeugs in die Umlaufbahn gewährleisten.
Wie der stellvertretende Kommandeur der Space Forces darauf hinwies, reicht der Anwendungsbereich der GLONASS-Satellitennavigatoren in der Armee von der Bereitstellung von Informationen über seine Koordinaten an einen einzelnen Soldaten bis hin zur Bereitstellung von Navigationsinformationen für ganze Militäreinheiten.
„Mit der Einführung der GLONASS-Satelliten wird an Bord der Trägerrakete eine kompakte Einheit installiert, die während des Fluges der Rakete hochpräzise Messungen der kontinuierlichen Flugbahn ermöglicht. Zuvor war eine Methode gefordert, die die Beteiligung einer großen Anzahl von Personen und Geldern erfordert, die darauf abzielt, die Kontrolle des Fluges der Rakete durch bodengestützte Flugbahnmesspunkte sicherzustellen, ”sagte Kvasnikov.
Ihm zufolge laufen derzeit Tests der Boden- und tragbaren Ausrüstung des GLONASS-Navigationssystems in den Weltraumtruppen der Russischen Föderation.
"Die Verwendung von GLONASS-Empfängern ermöglicht die Verwendung von GLONASS-Empfängern bei allen Wetterbedingungen und bietet eine sehr genaue Referenz zu den Koordinaten und der Zeit, insbesondere in sehr unebenem und hügeligem Gelände", sagte der stellvertretende Kommandant.
Vergleich von GLONASS und GPS.

Berücksichtigen Sie einige Merkmale der wichtigsten Satellitennavigationssysteme (NAVSTAR und GLONASS): Beide Systeme haben einen doppelten Zweck - militärische und zivile -, so dass sie zwei Arten von Signalen aussenden: eine mit reduzierter Genauigkeit bei der Bestimmung von Koordinaten (~ 100 m) für den zivilen Gebrauch und die andere hohe Genauigkeit (~ 10) -15 m und genauer) für militärische Zwecke. NAVSTAR-Satelliten befinden sich in sechs Ebenen in einer Höhe von ungefähr 20.180 km. Die GLONASS-Satelliten (Code "Hurricane") befinden sich in drei Ebenen auf einer Höhe von etwa 19.100 km. Die nominelle Anzahl von Satelliten in beiden Systemen beträgt 24. Die NAVSTAR-Konstellation war im April 1994 voll besetzt und wurde seitdem beibehalten, die GLONASS-Konstellation wurde im Dezember 1995 vollständig eingesetzt, ist jedoch seitdem erheblich zurückgegangen. Im Moment erholt es sich aktiv. Beide Systeme verwenden Signale, die auf sogenannten basieren. "Pseudo-Noise Sequences", deren Verwendung ihnen eine hohe Störfestigkeit und Zuverlässigkeit bei niedriger Sendeleistung der Sender verleiht. Entsprechend dem Zweck gibt es in jedem System zwei Grundfrequenzen - L1 (Standardgenauigkeit) und L2 (hohe Genauigkeit). Für NAVSTAR L1 = 1575,42 MHz und L2 = 1227,6 MHz. In GLONASS wird die Frequenztrennung von Signalen verwendet, das heißt, jeder Satellit arbeitet mit seiner eigenen Frequenz, und L1 liegt demnach zwischen 1602.56 und 1615.5 MHz und L2 zwischen 1246.43 und 1256.53. Das Signal in L1 steht allen Benutzern zur Verfügung, das Signal in L2 ist nur für das Militär verfügbar (dh es kann nicht ohne einen besonderen geheimen Schlüssel entschlüsselt werden). Jeder Satellit des Systems überträgt zusätzlich zu den Basisinformationen auch Zusatzinformationen, die für den kontinuierlichen Betrieb von Empfangsgeräten erforderlich sind. Diese Kategorie umfasst den vollständigen Almanach der gesamten Satellitenkonstellation, die sequenziell über mehrere Minuten übertragen wird. Der Start des empfangenden Geräts kann daher recht schnell sein, wenn es einen tatsächlichen Almanach enthält (etwa 1 Minute) - dies wird als "Warmstart" bezeichnet. Es kann jedoch bis zu 15 Minuten dauern, wenn der Empfänger gezwungen ist, einen vollständigen Almanach zu empfangen. n "Kaltstart". Die Notwendigkeit eines "Kaltstarts" entsteht in der Regel, wenn der Empfänger zum ersten Mal eingeschaltet wird oder wenn er längere Zeit nicht verwendet wurde.Differenzmessung
Getrennte Modelle von Satellitenempfängern ermöglichen die Herstellung sogenannter. "Differenzmessung" der Entfernung zwischen zwei Punkten mit großer Genauigkeit (Zentimeter). Messen Sie dazu die Position des Navigators an zwei Punkten mit kurzer Zeit. Obwohl jede derartige Messung ohne Bodenkorrektursystem eine Genauigkeit in der Größenordnung von 10 bis 15 Metern und mit einem solchen System von 10 bis 50 cm aufweist, weist die gemessene Entfernung einen viel kleineren Fehler auf, da die Faktoren, die die Messung stören (Satellitenbahnfehler, atmosphärische Heterogenität usw.). d.) sind in diesem Fall gegenseitig abzugsfähig. Darüber hinaus gibt es mehrere Systeme, die klärende Informationen senden ("differentielle Korrektur der Koordinaten"), wodurch die Genauigkeit der Koordinatenmessung des Empfängers auf zehn Zentimeter erhöht werden kann. Die Differenzkorrektur basiert auf geostationären Objekten (Satelliten, terrestrische Basisstationen) und wird normalerweise bezahlt (das Signal kann nur von einem bestimmten Empfänger entschlüsselt werden, nachdem das "Service-Abonnement" bezahlt wurde). Derzeit (2006) gibt es ein kostenloses europäisches EGNOS-System (European Geostationary Navigation Overlay Services), das auf zwei geostationären Satelliten basiert und eine hohe Genauigkeit (bis zu 30 cm) bietet, jedoch zeitweise und unzuverlässig arbeitet. In Nordamerika ist das WAAS-System das Pendant.
Mangel an GPS-Systemen.
Trotz aller Vorteile haben GPS-Systeme Nachteile. Ein GPS-Empfänger kann beispielsweise aus US-amerikanischen Sicherheitsgründen jederzeit ausgeschaltet werden. Darüber hinaus erfordert die Einführung der GPS-Technologie die Verfügbarkeit detaillierter elektronischer Karten mit einer Skala von bis zu 100 m, die nicht in allen Ländern kommerziell erhältlich sind. Es darf nicht erwähnt werden, dass das Satellitensystem bei der Berechnung der Koordinaten Fehler enthält. Die Art dieser Fehler ist unterschiedlich. Die Hauptfehlerquellen, die insbesondere die Genauigkeit der Navigationsberechnungen im GPS-System beeinflussen, sind:
Fehler aufgrund des selektiven Zugriffsmodus (S / A). Mit diesem Modus verringert das US-Verteidigungsministerium absichtlich die Standortgenauigkeit für Zivilisten. Im S / A-Modus werden künstliche Fehler generiert, die in das Signal an Bord der GPS-Satelliten eingefügt werden, um die Navigationsmessungen aufzurauhen. Solche Fehler sind falsche Daten auf der Umlaufbahn des Satelliten und die Verzerrung der Ablesungen seines Takts aufgrund der Einführung eines zusätzlichen Pseudozufallssignals. Die Größe der Standardabweichung aufgrund des Einflusses dieses Faktors beträgt ungefähr 30 m.
Fehler im Zusammenhang mit der Ausbreitung von Funkwellen in der Ionosphäre. Verzögerungen bei der Ausbreitung von Signalen, wenn sie die oberen Schichten der Atmosphäre durchlaufen, führen zu Fehlern in der Größenordnung von 20 bis 30 m am Nachmittag und 3 bis 6 m in der Nacht. Trotz der Tatsache, dass die vom GPS-Satelliten übertragene Navigationsnachricht die Parameter des Ionosphärenmodells enthält, beträgt die Kompensation der tatsächlichen Verzögerung bestenfalls 50%.
Fehler im Zusammenhang mit der Ausbreitung von Radiowellen in der Troposphäre. Tritt auf, wenn Radiowellen durch die unteren Schichten der Atmosphäre treten. Die Fehlerwerte dieses Typs bei der Verwendung von Signalen mit С / А-Code überschreiten nicht 30 m.
Ephemeridenfehler. Fehler beruhen auf der Diskrepanz zwischen der tatsächlichen Position des GPS-Satelliten und seiner berechneten Position, die aus den Daten des vom Satelliten übertragenen Navigationssignals bestimmt wird. Der Fehlerwert ist normalerweise nicht 3m.
Die Abfahrtszeit der Satellitenzeitskala wird durch die Diskrepanz zwischen den Zeitskalen verschiedener Satelliten verursacht. Sie kann durch Bodennachlaufstationen oder durch Ausgleich der Zeitskalenverschiebung in einem differentiellen Positioniermodus eliminiert werden.
Der Fehler bei der Bestimmung der Entfernung zum Satelliten ist ein statistischer Indikator. Sie wird für einen bestimmten Satelliten und ein bestimmtes Zeitintervall berechnet. Der Fehler ist nicht mit anderen Arten von Fehlern korreliert. Ihr Wert überschreitet normalerweise nicht 10 m.
NACHTEILE DES GLONASS-SYSTEMS:
Die Notwendigkeit, den Frequenzbereich nach rechts zu verschieben, stört GLONASS derzeit beim Betrieb sowohl der mobilen Satellitenkommunikation als auch der Radioastronomie
Beim Wechseln der Satelliten-Ephemeride erhöhen sich die Koordinatenfehler im Normalmodus um 25 bis 30 m und im Differentialmodus - über 10 m;
Die Korrektur der laufenden Sekunde unterbricht die Kontinuität des GLONASS-Signals. Dies führt zu großen Fehlern bei der Bestimmung der Koordinaten des Ortes des Verbrauchers, was für die Zivilluftfahrt nicht akzeptabel ist.
Die Schwierigkeit der Neuberechnung der Daten der GLONASS- und GPS-Systeme aufgrund des Fehlens einer offiziell veröffentlichten Matrix des Übergangs zwischen den verwendeten Koordinatensystemen.
Die Europäische Union entwickelt einen Satellitennavigation Galileo. China entwickelt auch ein eigenesnavigationssystem Beidou wird bis Ende 2008 das Hoheitsgebiet Chinas und die meisten benachbarten asiatischen Länder abdecken.
Galileo - Satellitensystemnavigationvon der Europäischen Union entwickelt. Das einheitliche Konzept wurde 1999 verabschiedet, der ursprüngliche Entwicklungsplan wurde 2003 genehmigt und war für den Start des Systems im Jahr 2008 vorgesehen.
Es wurde jedoch durch Meinungsverschiedenheiten zwischen den Regierungen der EU-Länder und die Zurückhaltung privater Unternehmen in Galileo verhindert. Ein Konsortium aus privaten Unternehmen bestand aus EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat und der deutschen Gruppe, darunter Deutsche Telekom und German Aerospace Center.
Im Mai 2007 zog sich das Konsortium aus dem Projekt zurück, und die Europäische Kommission übernahm die Leitung von Galileo. Jetzt ist nur einer von 30 geplanten Satelliten im Orbit, der zweite soll am 27. April 2008 starten.
Derzeit hat die EU rund 1 Milliarde Euro für das Projekt ausgegeben
Im Gegensatz zu dem amerikanischen GPS und dem russischen GLONASS wird das Galileo-System weder von der Regierung noch von militärischen Institutionen kontrolliert. Die Entwicklung wird von der ESA durchgeführt. Die Gesamtkosten für den Bau eines Systems werden auf 3,8 Milliarden Euro geschätzt. Der erste Satellit des Galileo-Systems wurde am 30. November 2005 an das Kosmodrom Baikonur geliefert. Am 28. Dezember 2005 um 8:19 Uhr wurde das GIOVE-A (Galileo In-Orbit Validation Element) -Segelflugzeug in eine berechnete Umlaufbahn mit einer Höhe von mehr als 23.000 km und einer Neigung von 56 ° gestartet. Die Masse des Geräts beträgt insgesamt 700 kg Dimensionen: Länge - 1,2 m, Durchmesser - 1,1 m Die aktive Existenz beträgt 12 Jahre. „ESA“ Die Europäische Weltraumorganisation (European Space Agency) ist eine internationale Organisation, die 1975 gegründet wurde, um die Bemühungen um die Eroberung des Weltraums für die Europäer von Galileo zu vereinen.
Einfluss der Ionosphäre auf die Charakteristik transionosphärischer Funksignale
Elektromagnetische Wellen, die sich in der Ionosphäre ausbreiten, erfahren eine Vielzahl von Störungen. Das Hauptmerkmal der Ionosphäre, das die Änderung der Parameter der Funkwelle bestimmt, ist der integrale (volle) elektronische InhaltIch (t ) oder ihre Ableitungen (in Zeit und Raum)Ich ´ t (t ), I ' x (t ) und I ' y (t a) entlang des Ausbreitungspfads.
PES-Änderungen können in regelmäßig und unregelmäßig unterteilt werden. Regelmäßige Änderungen (saisonal, täglich), zumindest für die magnetisch ruhige Ionosphäre mittlerer Breitengrad, werden durch Modelle beschrieben, die eine relative PES-Vorhersagegenauigkeit von 50 - 80% ermöglichen. Unregelmäßige Veränderungen (Variationen) sind mit ionosphärischen Unregelmäßigkeiten verschiedener Art verbunden, deren Spektrum das Potenzgesetz ist.
Als Ergebnis neuerer Studien wurde klar, dass Störungen der Ionosphäre während magnetischer Stürme die Signalverschlechterung und das Versagen des GPS-Systems nicht nur am Äquator und in der Polarzone, sondern sogar in mittleren Breiten beeinflussen. Die Frage nach den Ursachen und spezifischen Mechanismen dieses Einflusses bleibt jedoch weitgehend offen.
Die Hauptaufgabe der zukünftigen Forschung besteht in der Untersuchung der physikalischen Mechanismen multiskaliger Schwankungen des Gesamtelektronengehalts in der Ionosphäre während geomagnetischer Störungen des erdnahen Weltraums, begleitet von Signalabbau und Ausfällen von Satellitenfunksystemen. Diese Studien sollten umfassend sein, wobei eine Vielzahl unabhängiger experimenteller Mittel zur Überwachung der Ionosphäre (digitale Ionosonden, inkohärente Streuungsradare, Chirp-Ionosonden usw.) einbezogen werden sollte.
GPS-Genauigkeit
Jeder vollständige Datensatz enthält ein Ionosphärenmodell, das am Empfänger verwendet wird, um die Phasenverzögerung eines Signals zu approximieren, wenn es an jedem Satellitenstandort und zu jeder Zeit durch die Ionosphäre geht. Methoden zum Messen der Entfernung zum Satelliten unter Verwendung eines Pseudozufallscodes. Pseudo-Bereich - der Abstand zwischen der Empfangsantenne und dem Satelliten, gemessen mit einem Pseudo-Zufallscode. Wie bereits erwähnt, sind diese Abstände erforderlich, um die Koordinaten zu berechnen. Das Pseudkann wie folgt beschrieben werden.
Stellen Sie sich vor, dass die Uhr des Satelliten und des Empfängers vollständig miteinander synchronisiert sind. Wenn der PRN-Code vom Satelliten übertragen wird, gibt der Empfänger eine exakte Kopie desselben Codes wieder. Nach einiger Zeit wird der vom Satelliten übertragene Code vom Empfänger empfangen. Durch den Vergleich des übertragenen Codes und seiner genauen Kopie kann der Empfänger die Zeit berechnen, die der Code benötigt, um den Empfänger zu erreichen. Durch Vervielfachung der Fahrzeit mit Lichtgeschwindigkeit ergibt sich die Entfernung zwischen dem Satelliten und dem Empfänger. Distanzmessung per Code Leider ist die Annahme, dass der Empfänger und die Satellitenuhr vollständig synchronisiert sind, nicht ganz korrekt. Dieses Verfahren zur Berechnung der Entfernung würde eine sehr genaue Synchronisation der Satellitenuhr und des Empfängers erfordern. GPS-Satelliten sind sehr genaue Atomuhren, es ist sehr teuer, einen Empfänger mit solchen Uhren zu versehen, da ihr Preis 20.000 US-Dollar erreichen kann.
Das Uhrzeitsynchronisationsproblem wird gelöst, indem der Empfängeruhrfehler als zusätzliche Unbekanntheit in den Navigationsgleichungen betrachtet wird.
Der Abstand zwischen dem Satelliten und dem Empfänger ist die Summe der Gesamtzahl der vollständigen Zyklen plus dem Teilzyklus zwischen dem Empfänger und dem Satelliten, multipliziert mit der Trägerwellenlänge. Der durch die Trägerphase bestimmte Bereich hat eine viel größere Genauigkeit als der durch Code erhaltene Bereich.
Es gibt jedoch ein Problem. Die Trägerwelle ist eine Sinuswelle, was bedeutet, dass alle Zyklen gleich aussehen. Daher kann ein GPS-Empfänger keinen Zyklus von einem anderen unterscheiden. Mit anderen Worten kann der Empfänger, sobald er eingeschaltet ist, nicht die Gesamtzahl der vollständigen Zyklen zwischen dem Satelliten und dem Empfänger bestimmen. Es kann nur den Bruchteil des Zyklus bestimmen (mit einer Genauigkeit von mindestens 2 mm), während die Gesamtzahl der Zyklen unbekannt oder mehrdeutig bleibt.
Glücklicherweise kann der Empfänger den Phasenwechsel im eingeschalteten Zustand überwachen. Dies bedeutet, dass sich die anfängliche Unsicherheit im Laufe der Zeit auflöst. Die Bestimmung der Gesamtzahl der Trägerzyklen (Wellenlängen) zwischen der Antenne und dem Satelliten wird als Ambiguitätsauflösung bezeichnet - die Suche nach dem ganzzahligen Wert der Anzahl der Wellenlängen. Bei Nachbearbeitungsmessungen, mit denen ein Ort mit Zentimetergenauigkeit ermittelt wird, wird dieser ganzzahlige Wert während der Verarbeitung auf einem Computer bestimmt. Für Echtzeitmessungen, die zur zentimetergenauen Positionsbestimmung verwendet werden, wird dieser ganzzahlige Wert während eines als Initialisierung bezeichneten Prozesses bestimmt.
Ein Schleifensprung-Signal ist ein Sprung zu einer ganzzahligen Anzahl von Zyklen in der Trägerphase, wenn die Entfernung gemessen wird. Signalverlust kann durch ein Hindernis zwischen dem Signal und dem Satelliten verursacht werden. Funkstörungen, ionosphärische Störungen und hohe Empfängerdynamik - all dies kann auch ein kausaler Signalverlust sein. Aufgrund eines Empfängerfehlers kann auch ein Schleifenrutschen auftreten. Ein Loop-Sprung kann beliebig lange dauern.
Sie müssen die Koordinaten Ihrer Basisstation so genau wie möglich kennen, da die Genauigkeit, die sich aus der Differenzkorrektur ergibt, direkt von der Genauigkeit der Koordinaten der Basisstation abhängt. Es gibt zwei Methoden zum Durchführen der Differentialkorrektur in Echtzeit und in der Nachverarbeitung.
Ich glaube, dass die Entwicklung der SNA dazu beiträgt, sich gut zu entwickeln, und das Land, dem die SNA selbst gehört. Die aktive Erforschung des Weltraums in der Nähe unseres Planeten geht weiter. Die Erfolge auf dem Gebiet der Funkelektronik helfen nicht nur im militärischen Bereich, sondern auch im zivilen Bereich. Dank HF zum Beispiel ist die Suche nach Bergtouristen viel einfacher geworden. HH ist der „Helfer“ des Fahrers auf den Straßen und nicht nur. Aber egal, wie gut, es ist gut, eine schlechte Seite zu haben ... Die ohnehin schon genutzten Satelliten und ihre Fragmente verunreinigen den erdnahen Weltraum ständig. Wir müssen unsere Bedürfnisse erfüllen, ohne die Umwelt zu schädigen, was wir selten bekommen .... WISSENSCHAFTLICHE UND INFORMATIONSZENTRUM DER KOORDINATION (2002). - offizielle technische Beschreibung der Parameter und des GLONASS-Signals. Überprüft am 14. Dezember 2009
RUSSISCHES WISSENSCHAFTLICHES FORSCHUNGSINSTITUT FÜR RAUMFAHRT (2008). - offizielle technische Beschreibung der Parameter und des GLONASS-Signals. Überprüft am 14. Dezember 2009
Heute gibt es auf der Welt mehrere Navigationssysteme, die künstliche Satelliten der Erde verwenden. Ein wahrhaft globaler Ortungsdienst an fast jedem Ort unserer Erde wird jedoch von nur zwei ausgeführt: dem russischen GLONASS und dem amerikanischen GPS.
Globales GPS-Ortungssystem
Das amerikanische GPS-Positionierungssystem ist in seiner Funktionalität dem russischen GLONASS-System ähnlich. Sein Hauptzweck ist die genaue Bestimmung der Koordinaten des Verbrauchers, der Komponenten des Geschwindigkeitsvektors und der Referenz auf die Systemzeitskala.
In ähnlicher Weise wurde das GPS-System für das US-Verteidigungsministerium entwickelt und steht unter seiner Kontrolle. GPS besteht wie das GLONASS-System aus einem Weltraumsegment, einem bodengestützten Befehlsmesskomplex und einem Verbrauchersegment.
Galileo Satellitennavigationssystem
In den kommenden Jahren planen die Europäische Union (EU) und die Europäische Weltraumorganisation (ESA), ein neues europäisches globales Satellitennavigationssystem Galileo (Galileo) in Betrieb zu nehmen. Das Vorhandensein eines zweiten voll funktionsfähigen GNSS-Satellitensystems verspricht erheblichen Nutzen für zivile Verbraucher auf der ganzen Welt. Durch den erfolgreichen Start des Galileo-Projekts wird die Anzahl der für Benutzer verfügbaren Navigationssatelliten mehr als verdoppelt. Ein derartiger Anstieg der Anzahl von Satelliten wird nicht nur für das Offline-Arbeiten von Nutzen sein, sondern verbessert auch die Qualität der Koordinatenbestimmung und die Fähigkeit von GPS-Geräten, die Mehrdeutigkeit in der Trägerphase für das verfolgte Satellitensignal aufzulösen.
Vergleichende Merkmale
Indisches Satellitennavigationssystem
Die indische Regierung hat am 9. Mai 2006 ein Projekt genehmigt, mit dem das IRNSS (Indian Satellite Regional Navigation System) mit einem Budget von 14,2 Milliarden Rupien in den nächsten 6-7 Jahren eingesetzt werden soll. Die IRNSS-Satellitenkonstellation besteht aus sieben Satelliten in geosynchronen Umlaufbahnen. Alle sieben Satelliten werden mit indischen Kontrollstationen ununterbrochen im Radio sichtbar sein.
Das IRNSS-Bodensegment wird über eine Überwachungsstation, eine Station, Reservierungen, eine Bordsystemüberwachungs- und Kontrollstation verfügen. Das staatseigene Unternehmen ISRO ist für die Einführung von IRNSS verantwortlich, die vollständig unter der Kontrolle der indischen Regierung steht. Navigationsempfänger, die IRNSS-Signale empfangen, werden auch von indischen Unternehmen entwickelt und produziert.
China Navigationssatellitensystem-Kompass
China, das am schnellsten wachsende Land der Welt, hat auch mit dem Bau seines eigenen Satellitennavigationssystems Compass begonnen.
Das Satellitensegment des Satellitennavigationssystems Compass wird aus 5 Satelliten im geostationären Orbit (GSO) und 30 Satelliten im durchschnittlichen Erdorbit gebildet.
Es werden zwei Arten von Diensten angeboten. Zur allgemeinen Verwendung wird ein Signal übertragen, dessen Verarbeitung eine Positionierungsgenauigkeit von 10 m, eine Geschwindigkeit von 0,2 m / s und die Bestimmung der aktuellen Uhrzeit mit einer Genauigkeit von 50 ns ermöglicht.
Eine begrenzte Anzahl von Benutzern kann mit größerer Genauigkeit messen.
China möchte bei der Entwicklung der Satellitennavigation mit anderen Ländern zusammenarbeiten, damit Compass mit anderen globalen Navigationssystemen interagieren kann.
Japanisches Quasi-Zenith-Navigationssystem (QZSS)
Ursprünglich war das japanische QZSS im Jahr 2002 als kommerzielles System mit einer Reihe von Diensten für die mobile Kommunikation, den Rundfunk und die weit verbreitete Nutzung für die Navigation in Japan und den benachbarten Gebieten Südostasiens konzipiert. Der erste Start des Satelliten für QZSS war für 2008 geplant. Im März 2006 kündigte die japanische Regierung an, dass der erste Satellit nicht für den kommerziellen Gebrauch bestimmt ist und vollständig aus Haushaltsmitteln finanziert wird, um Entscheidungen zu treffen, die zur Lösung von Navigationsproblemen getroffen werden. Erst nach erfolgreichem Abschluss der Tests des ersten Satelliten wird die zweite Stufe beginnen und die nächsten Satelliten werden den zuvor geplanten Leistungsumfang vollständig gewährleisten.
Alexey Mikhailov, Bereichsleiter, FGU SIC „Protection“
In letzter Zeit wurden globale Navigationssysteme zunehmend zur Bestimmung der Koordinaten von stationären und mobilen Schutzobjekten eingesetzt.
Bleiben Sie nicht abseits vom Einsatz moderner technologischer Fortschritte und privater Sicherheit. In den Sicherheitsabteilungen werden seit langem Navigationsüberwachungssysteme wie Almaz (Kodos-B LLC, Moskau), Argo-Strazh (Navigationssysteme CJSC, Omsk) und Arkan CJSC eingesetzt. BaltAvtoPoisk, St. Petersburg, Inflow GPS LLC (Sicherheitsbüro Sokrat, Irkutsk).
Diese und viele andere Navigationssysteme basieren auf einem GPS-Empfänger (das Arkan-Navigationssystem kann auch das herkömmliche Funksuchverfahren zur Bestimmung des Orts eines Objekts verwenden), sodass Mitarbeiter, die diese Systeme bei ihrer Arbeit verwenden, ein allgemeines Verständnis der Prinzipien des GPS-Betriebs haben und genau wissen müssen das kann von solchen Systemen verlangt werden und was von ihnen nicht zu erwarten ist.
Das Verständnis der Prinzipien von Navigationssystemen und deren ordnungsgemäße Funktion ist der Schlüssel zu erfolgreicher Arbeit.
Hinter der geheimnisvollen GPS-Abkürzung steht das Global Positioning System - ein globales Positionierungssystem. Ursprünglich wurde das Projekt vom US-Militär als Mittel zur Bestimmung von Koordinaten in Echtzeit an jedem Ort der Welt erstellt und verwendet. Es wurde Navstar (Navigationssystem mit Timing und Ranging) genannt, während die Abkürzung GPS später erschien.
GPS-Betriebsprinzip
Das Prinzip der Triangulation ist die Grundlage für den Betrieb eines Navigationssystems, d. H. Bestimmen des Ortes eines Objekts aus einer Entfernung von bis zu drei bekannten Punkten im Raum.
Der Einfachheit halber gehen wir davon aus, dass wir drei feste Satelliten haben, deren Koordinaten wir mit hoher Genauigkeit kennen. Dann analysieren wir die Laufzeit des von ihnen synchron ausgesendeten Funksignals und bestimmen unsere Koordinaten im dreidimensionalen Raum. Die Entfernung zum Ziel, die den Zeitpunkt des Eintreffens des reflektierten Funksignals vom Objekt analysiert, wurde zu Beginn des zwanzigsten Jahrhunderts in Radar bestimmt, das gleiche Prinzip wird in Satellitennavigationssystemen verwendet.
Leider ist hier die Ähnlichkeit zwischen herkömmlichen und Satellitenortungssystemen erschöpft. In der Realität bewegen sich Satelliten auf einer Umlaufbahn von ungefähr 20.000 km mit großer Geschwindigkeit. Daher kennen wir auf der Erde nicht die Zeit der synchronen Strahlung von Satelliten und ihre Koordinaten.
Um diese Widersprüche aufzulösen, beschlossen die Entwickler, eine Atomuhr an Bord der Satelliten zu installieren. Sie sind äußerst genau und teuer. Sie kosten etwa 100.000 Dollar und jeder Satellit hat 4 davon, sodass Sie einen zuverlässigen Betrieb gewährleisten können. Damit wurde das Problem der Synchronisation (das Problem der gleichzeitigen Aussendung eines Funksignals) von Satelliten gelöst.
Die Frage der Bestimmung des Ortes des Satelliten im Orbit wird gelöst, indem von den Bodenverfolgungsstationen Daten auf ihren Umlaufbahnen zum Kontrollzentrum übertragen werden, wo die verfeinerten Elemente der Trajektorien berechnet werden. Diese Parameter werden in den Almanach eingegeben, an die Satelliten übertragen und senden diese Informationen wiederum an alle Betriebsempfänger. Um die Umlaufbahnen und Koordinaten von Satelliten zu steuern, gibt es vier Bodenverfolgungsstationen:
kommunikationssysteme und Kontrollzentrum, die vom US-Verteidigungsministerium kontrolliert werden. In Anbetracht der Tatsache, dass der Flug in einer Höhe von 20 km in einem luftleeren Raum stattfindet, wird er durch mathematische Abhängigkeiten mit hoher Genauigkeit beschrieben. Unter Berücksichtigung aller obigen Punkte wurde das Problem der Bestimmung des Orts eines Satelliten im Orbit gelöst.
Es bleibt das Problem der Bestimmung der genauen Uhrzeit im GPS-Signal des Bodenempfängers zu lösen. Tatsache ist, dass unsere Uhr im Empfänger des GPS-Signals im Vergleich zu der Ausbreitungsgeschwindigkeit des Funksignals im Raum einen großen Zeitfehler aufweist.
Um dieses Problem zu lösen, wird ein Signal vom vierten Satelliten verwendet. Betrachten Sie Reis. 1.
Wenn der Abstand A einem Satelliten bekannt ist, können die Koordinaten des Empfängers nicht bestimmt werden (er kann sich an einem beliebigen Punkt einer Kugel des Radius A befinden, die um den Satelliten herum beschrieben wird). Der Abstand B des Empfängers vom zweiten Satelliten sei bekannt. In diesem Fall ist auch die Definition von Koordinaten nicht möglich - das Objekt befindet sich irgendwo auf dem Kreis (in Fig. 1 ist es blau dargestellt), was der Schnittpunkt zweier Kugeln ist. Der Abstand C zum dritten Satelliten reduziert die Koordinatenunsicherheit auf zwei Punkte (in Abbildung 1 durch zwei fette blaue Punkte angezeigt). Dies reicht aus, um die Koordinaten eindeutig zu bestimmen - Tatsache ist, dass sich von zwei möglichen Punkten des Empfängerstandorts nur einer auf der Erdoberfläche (oder in unmittelbarer Nähe) befindet und der zweite, falsch, entweder tief in der Erde oder sehr hoch darüber liegt. von der Oberfläche. Für eine dreidimensionale Navigation genügt es theoretisch, die Entfernung des Empfängers zu drei Satelliten zu kennen, es ist jedoch erforderlich, die Zeit im GPS-Empfänger zu korrigieren, nachdem ein Signal von vier (oder mehr) Satelliten empfangen wurde (Daten des Kreises sind in der Figur nicht dargestellt, um die Abbildung nicht zu stören). Der Empfänger sucht nach dem Schnittpunkt der entsprechenden Kugeln. Wenn es keinen solchen Punkt gibt, beginnt der Prozessor des Empfängers, seinen Takt durch das Verfahren der aufeinanderfolgenden Annäherungen anzupassen, bis er an einem Punkt den Schnittpunkt aller Sphären erreicht.
Am wichtigsten:
1. Um die Koordinaten des Objekts zu bestimmen, muss das GPS mindestens vier Satelliten "sehen".
2. Je mehr Satelliten der Empfänger „sah“, desto genauer bestimmt er seine Koordinaten.
Genauigkeit der Koordinatenbestimmung im GPS-System
Der unbestreitbare Vorteil von GPS ist die hohe Genauigkeit der Koordinatenbestimmung, unabhängig vom Ort des Überwachungsobjekts auf dem Boden. Tatsache ist, dass sich 24 Satelliten ständig im Orbit befinden, die sich mit unterschiedlichen Deklinationen im Orbit befinden und theoretisch überall auf der Welt sichtbar sind, um globales Handeln sicherzustellen. Um dieses Problem zu lösen, reicht es aus, dass sich 18 Satelliten im Orbit befinden. Es wurde jedoch die Verwendung von 24 gewählt, um die Genauigkeit der Koordinatenbestimmung der Satelliten selbst zu verbessern.
Die Genauigkeit der Koordinatenbestimmung im GPS-System hängt von vielen Parametern ab, die sowohl von den physikalischen Parametern (insbesondere vom Signal-Rausch-Verhältnis des empfangenen Signals, siehe unten) als auch von der Position des Systembesitzers (USA) abhängen. Im GPS-System gibt es einen Selective Access-Modus (SA - Selective Availability) - Fehler, die künstlich in Satellitensignale für ungenaue zivile GPS-Empfänger eingeführt wurden, die die Vereinigten Staaten während der Operation Desert Storm im Irak durchgeführt haben. In fig. Fig. 2 zeigt ein Diagramm zur Bestimmung des Fehlers im selektiven Fehlermodus und ohne diesen.
Die Genauigkeit der Koordinatenbestimmung hängt auch ab von:
- Aus dem Zustand der Atmosphäre und der Ionosphäre ergibt sich, da die Ausbreitungsgeschwindigkeit des elektromagnetischen Feldes nur in einem Vakuum konstant ist, und jedes Fortpflanzungsmedium eine Änderung der Ausbreitungsgeschwindigkeit eines Funksignals einführt;
- Von "Mehrwegeausbreitung" des Funksignals;
- Von der relativen Position der Satelliten am Himmel die sogenannte "GDOP" (geometrischer Faktor, der die Genauigkeit verringert);
- Von der mathematischen Verarbeitung an Bord des Satelliten und vielem mehr.
In Anbetracht des Vorstehenden kann ein GPS-Empfänger die Bestimmung seiner Position in der Nähe von Hochhäusern (sogenannten Stadtbrunnen), in einem dichten Fichtenwald und natürlich in einem Hauptgebäude oder einer Metallgarage oder einem Hangar vollständig einstellen.
Einige private Sicherheitsunternehmen fordern die Möglichkeit, das Leben und die Gesundheit der Bürger vor einem Angriff mit einem GPS-Empfänger + Handy zu schützen. Diese Benutzer müssen jedoch daran denken, dass sie eine Person, die GPS verwendet, innerhalb des Gebäudes, im Treppenhaus, im Verkehr (d. H. wo Angriffe am häufigsten vorkommen) ist unmöglich.
Die tatsächliche Genauigkeit der Koordinatenbestimmung im GPS-System in Russland beträgt 10 bis 25 m. Natürlich ist diese Genauigkeit nicht das für das GPS-System erreichbare Maximum, wobei unterschiedliche Verfahren zur Bestimmung der Genauigkeit bis zu 10 cm oder weniger betragen können, aber wir müssen über diese Systeme sprechen welche tatsächlich in Sicherheitsabteilungen verwendet werden.
Am wichtigsten:
- GPS-Navigationssysteme zeichnen sich durch eine hohe Genauigkeit bei der Bestimmung von Koordinaten (in der Größenordnung von 10 bis 25 m) aus, unabhängig von der Entfernung des Objekts, geschützt vor der zentralen Überwachungsstation und dem Zeitpunkt der Bewegung des Objekts.
- Die Genauigkeit der Koordinatenbestimmung kann vom Eigentümer des Systems (USA) bis zur vollständigen Unmöglichkeit der Koordinatenbestimmung reduziert werden.
- Der GPS-Empfänger kann vollständig aufhören, seine Position in der Nähe von Hochhäusern (den sogenannten Stadtbrunnen), in einem dichten Fichtenwald und natürlich in der Hauptstadtstruktur, einer Metallgarage oder einem Hangar zu bestimmen.
Immunsystem des GPS-Systems
Störfestigkeit von GPS-Systemen hinsichtlich ihrer Verwendung in Sicherheitssystemen. Tatsache ist, dass die Leistung des Satellitensenders für den L1-Emissionsbereich auf 50 Watt und für den L2-Bereich auf 8 Watt begrenzt ist und die Aufhängungshöhe des Satelliten etwa 20.000 km beträgt.
Daher ist es nicht schwer zu verstehen, wie klein die Flussdichte der elektromagnetischen Strahlung für die GPS-Antenne ist. Eine einfache geometrische Berechnung zeigt, dass bei einer Sendeantenne eine Breite von 2є und eine Satellitenhöhe über der Erdoberfläche 20.000 km betragen
der elektromagnetische Strahlungsfluss fällt auf einen Kreis mit einem Durchmesser von 700 km. Diese Situation spart etwas den Gigahertz-Bereich der Strahlung (mit einer Erhöhung der Betriebsfrequenz sinkt der Geräuschpegel im Medium), gleichzeitig wird jedoch die elektromagnetische Welle um das Hindernis begrenzt. Die Ausbreitung einer elektromagnetischen Welle in diesem Bereich ist nahezu unkompliziert.
Der nächste Punkt, der häufig übersehen wird: Der GPS-Empfänger bestimmt seine Koordinaten an seinem Standort und die Informationen über die Koordinaten müssen an die Zapfwelle übermittelt werden. In der Regel nutzen sie dazu Mobilfunknetze oder UKW-Funkkanäle mit allen daraus folgenden Konsequenzen.
Mobilfunknetze werden leicht unterdrückt, der Benutzer ist vollständig von der Qualität der Dienste des Mobilfunkunternehmens abhängig, die im Großen und Ganzen nicht für die Schnelligkeit der Zustellung der Mitteilung, die Zuverlässigkeit der Kommunikation und die langfristigen Verpflichtungen des Kunden verantwortlich sind. Ein großer Abdeckungsbereich, ein niedriger Ausrüstungspreis (aber nicht der Preis einer regelmäßigen Übertragung von Objektkoordinaten) ist jedoch ein attraktives Merkmal einer solchen Lösung.
Der UKW-Funkkanal ist im Vergleich zu zellularen Netzwerken ein zuverlässigerer Kommunikationskanal, er erfordert keinen Vermittler für die Übertragung von Koordinaten zwischen dem Schutzobjekt und dem DSP, sondern zeichnet sich durch einen viel kleineren Abdeckungsbereich und die Notwendigkeit einer eigenen Frequenzressource aus, die nicht immer einfach zu implementieren ist. In diesem Fall besteht keine Notwendigkeit, den Verkehrsaustausch zwischen dem Schutzobjekt und der Überwachungsstation zu bezahlen.
Am wichtigsten:
Der Benutzer sollte alle Fallstricke, die mit der Verwendung von GPS-Überwachungssystemen verbunden sind, klar genug vertreten und kompetent Verträge für Dienstleistungen abschließen, die dem Kunden zur Verfügung gestellt werden, wobei höhere Gewalt zu berücksichtigen ist.
GPS oder "GLONASS"
Wenn GPS ein globales Positionssystem ist, das in den USA hergestellt wird, dann wird GLONASS (GLOBAL Navigation Satellite System) in der UdSSR - Russland hergestellt. In gesegneten Zeiten verfügte die UdSSR über ein vollwertiges Satellitennavigationssystem, das in seinen Eigenschaften mit dem US-amerikanischen Positionierungssystem identisch war, das hauptsächlich für militärische Zwecke verwendet wurde.
In den Jahren der Perestroika "fielen" die meisten GLONASS-Satelliten oder wurden außer Betrieb, und in den schlimmsten Jahren gab es anstelle von 24 Satelliten im Orbit nur 7 Satelliten. Für 2006 befinden sich 16 Satelliten im Orbit, von denen nur 9 in der nahen Zukunft arbeiten oder arbeiten werden (da sich einige Satelliten auf der Stufe der vollständigen Entwicklung ihrer Ressource befinden).
Zu Beginn der Entwicklung der Satellitennavigation in Russland für den zivilen Einsatz wurden Navigationsempfänger auf den Markt gebracht, die den Empfang von GPS- und GLONASS-Signalen ermöglichen, was zweifellos korrekt ist, da sich die Anzahl der möglicherweise für den Empfang verfügbaren Satelliten verdoppelt. Auf diese Weise können Sie die Wahrscheinlichkeit der Positionsbestimmung und Genauigkeit von Koordinaten erhöhen.
Aufgrund des tatsächlichen Ausfalls des GLONASS-Systems in den späten 90er Jahren sind derzeit jedoch nur GPS-Empfänger auf dem freien Markt in Russland vertreten. Aber nicht alles ist so schlimm, wie es scheint.
Der russische Präsident Wladimir Putin hat als vorrangiges nationales Programm für die Wiederbelebung des GLONASS-Navigationssystems bezeichnet. 2007 sollen 18 Arbeitssatelliten im Orbit und bis 2010 24 Satelliten vorhanden sein, wodurch die Abhängigkeit von einem so wichtigen Thema wie der globalen Bestimmung der Koordinaten ( in erster Linie für Zivil- und Abteilungsfragen *), aus dem Willen der Vereinigten Staaten.
(* Der Leser hat möglicherweise den Eindruck, dass das russische Militär derzeit keine Koordinaten ermitteln kann. Dies ist jedoch nicht der Fall.) Die militärische Navigation verwendet stets Backup-Systeme, wie beispielsweise Navigationssysteme, die auf Funkfeuer basieren, mechanische Gyroskope, Ringlaser-Gyros, Änderungen des Erdmagnetfelds oder andere dem Autor unbekannte Prinzipien zu registrieren, alle diese Systeme zeichnen sich jedoch durch einen hohen Preis und eine wesentlich geringere Genauigkeit bei der Bestimmung der Koordinaten aus (vielleicht für Gefängnissysteme auf Basis Ringlaserkreisel) und eine Tendenz zur Abhängigkeit Genauigkeit der Koordinaten des Objekts aus der Zeit (der Effekt der Fehlerakkumulation).
Basierend auf dem Vorstehenden ist das Navigationsniveau mit diesen Mitteln durch das Flugzeugniveau (Flugzeug, Hubschrauber) begrenzt, und die Verwendung eines Satellitennavigationssystems ermöglicht es Ihnen, die Position mit relativ geringen Materialkosten für eine große Anzahl von Objekten zu ermitteln, bis zu einem einzelnen Soldaten, der in den USA eingesetzt wird (Die Schaffung sogenannter "Computer" -Divisionen, in den USA wurden bereits zwei solcher Divisionen geschaffen).
Am wichtigsten:
- Derzeit dominieren GPS-Empfänger den heimischen Markt.
- Sowohl der Entwickler von Navigationssystemen als auch der Benutzer müssen in naher Zukunft daran denken, GPS- und GLONASS-Systeme gemeinsam zu nutzen.
- Wenn eine vollständige Orbitalkonstellation erstellt wird, muss auf das GLONASS-System umgeschaltet werden (obwohl dies tatsächlich möglich ist, und zwar bei einem GLONASS-Empfänger, der dem GPS-System entspricht oder darunter liegt, bei annähernd gleichen technischen Eigenschaften der Empfänger beider Systeme).
Es ist nicht schade, Geld für den Stabilisierungsfonds Russlands auszugeben, um ein wirklich wettbewerbsfähiges globales Navigationssystem im Inland zu schaffen, obwohl dies nicht Gegenstand dieses Artikels ist.
Schlussfolgerungen:
- Das globale Navigationssystem ist eine der neuesten Errungenschaften des modernen Engineerings und sollte in der Praxis des PSB aktiv eingesetzt werden.
- Das globale Navigationssystem ist kein Allheilmittel für alle Übel.
- Eine wirtschaftlich ungerechtfertigte, technisch nicht vertretbare Verwendung ohne Berücksichtigung der Besonderheiten des Navigationssystems kann in den Augen des Verbrauchers zu einer völligen Diskreditierung dieser Richtung führen.
Der Artikel wurde gemeinsam mit der Redaktion der Zeitschrift "Protection" erstellt.
E. Povalyaev, S. Khutornoy
Satellitennavigationssysteme GLONASS und GPS.
Wir bieten Ihnen einen Artikel zu den Satellitennavigationssystemen Glonass (globales Navigationssatellitensystem) und GPS (Global Positioning System). Der Artikel befasst sich mit dem Aufbau und Betrieb von Systemen, dem Aufbau und den Funktionen von Verbrauchergeräten (Empfängern), Algorithmen zur Lösung des Navigationsproblems und den Perspektiven für die Entwicklung von Systemen.
Reisende haben sich seit der Antike gefragt: Wie lässt sich der Standort auf der Erde bestimmen? Die alten Navigatoren wurden von den Sternen geführt und zeigten die Bewegungsrichtung an: Wenn Sie die Durchschnittsgeschwindigkeit und die Fahrzeit kennen, können Sie im Weltraum navigieren und die Entfernung zum endgültigen Ziel bestimmen. Die Wetterbedingungen waren jedoch nicht immer in der Hand von Forschern, so dass es nicht schwierig war, vom Kurs abzuweichen. Mit dem Aufkommen der Kompassaufgabe wurde die Aufgabe erheblich vereinfacht. Der Reisende ist bereits weniger wetterabhängig.
Die Ära des Radios hat dem Menschen neue Möglichkeiten eröffnet. Mit dem Aufkommen von Radarstationen, als es möglich wurde, die Bewegungsparameter und den relativen Ort eines Objekts aus einem von seiner Oberfläche reflektierten Radarstrahl zu messen, stellte sich die Frage, ob es möglich war, die Bewegungsparameter eines Objekts aus einem abgestrahlten Signal zu messen. In der UdSSR wurde 1957 eine Gruppe von Wissenschaftlern unter Leitung von V.A. Kotelnikova bestätigte experimentell die Möglichkeit, die Bewegungsparameter eines künstlichen Erdsatelliten (AES) basierend auf Messungen der Dopplerfrequenzverschiebung des von diesem Satelliten ausgestrahlten Signals zu bestimmen. Am wichtigsten war jedoch die Möglichkeit, das inverse Problem zu lösen - das Auffinden der Koordinaten des Empfängers anhand der gemessenen Dopplerverschiebung des vom Satelliten ausgesendeten Signals, wenn die Bewegungsparameter und Koordinaten dieses Satelliten bekannt sind. Bei einer Umlaufbahn sendet der Satellit ein Signal einer bestimmten Frequenz aus, dessen Nennwert auf der Empfängerseite (Verbraucher) bekannt ist. Die Position des Satelliten zu jedem Zeitpunkt ist bekannt, genauer gesagt, er kann auf der Grundlage der im Satellitensignal eingebetteten Informationen berechnet werden. Der Benutzer, der die Frequenz des ankommenden Signals misst, vergleicht den Standardwert ee und berechnet so die Dopplerfrequenzverschiebung, die durch die Bewegung des Satelliten verursacht wird. Die Messungen werden kontinuierlich durchgeführt, sodass Sie eine Art Funktion zum Ändern der Dopplerfrequenz erstellen können. Zu einem bestimmten Zeitpunkt wird die Frequenz Null und wechselt dann das Vorzeichen. In dem Moment, in dem die Dopplerfrequenz Null ist, befindet sich der Verbraucher auf der Leitung, was normal zum Satellitenbewegungsvektor ist. Unter Verwendung der Abhängigkeit der Steilheit der Dopplerfrequenzkurve vom Abstand zwischen dem Verbraucher und dem Satelliten und Messen des Zeitpunkts, zu dem die Dopplerfrequenz Null ist, ist es möglich, die Koordinaten des Verbrauchers zu berechnen.
So wird ein künstlicher Satellit der Erde zu einer Radionavigations-Referenzstation, deren Koordinaten sich aufgrund der Umlaufbahn des Satelliten mit der Zeit ändern, jedoch aufgrund der im Satellitennavigationssignal eingebetteten Ephemeriden-Informationen für jeden Zeitpunkt im Voraus berechnet werden können.
1958-1959 in der Leningrad Air Force Engineering Academy (LVVIA) sie. A.F. Mozhaisky, das Institut für Theoretische Astronomie der Akademie der Wissenschaften der UdSSR, das Institut für Elektromechanik der Akademie der Wissenschaften der UdSSR, zwei Meeresforschungsinstitute und der Gorky NIRFI untersuchten das Thema "Satellit", aus dem später das erste russische Satellitennavigationssystem "Tsikada" entstand. Und 1963 wurde mit dem Bau dieses Systems begonnen. 1967 wurde der erste russische Satellit Kosmos-192 in den Orbit gebracht. Ein charakteristisches Merkmal der Funknavigationssatellitensysteme der ersten Generation ist die Verwendung eines Satelliten mit niedrigem Orbit und die Verwendung eines einzigen, derzeit sichtbaren Satellitensignals, um die Navigationsparameter eines Objekts zu messen. Anschließend wurden die Cicada-Satelliten mit Empfangsgeräten zum Erkennen von Objekten in Not ausgestattet.
Parallel dazu wird nach dem erfolgreichen Start der UdSSR des ersten künstlichen Satelliten der Erde in den Vereinigten Staaten im Laboratorium für Angewandte Physik der John Hopkins University an der Möglichkeit gearbeitet, die Parameter des vom Satelliten ausgestrahlten Signals zu messen. Messungen werden zur Berechnung der Satellitenbewegungsparameter relativ zum Bodenbeobachtungspunkt verwendet. Die Lösung des inversen Problems ist eine Frage der Zeit.
Basierend auf diesen Studien wurde 1964 in den USA das erste Doppler-Satellitenfunknavigationssystem Transit in den USA geschaffen. Sein Hauptzweck ist die Navigationsunterstützung für den Start von U-Booten von ballistischen Polaris-Raketen. Der Vater des Systems ist der Direktor des Applied Physics Laboratory R. Kershner. Für den kommerziellen Einsatz ist das System ab 1967 verfügbar. Wie im Cicada-System werden im Transit-System die Quellkoordinaten aus der Dopplerfrequenzverschiebung des Signals eines der 7 sichtbaren Satelliten berechnet. Die Satellitensysteme haben kreisförmige polare Umlaufbahnen mit einer Höhe von ~ 1100 km über der Erdoberfläche, die Umlaufbahn der Transit-Satelliten beträgt 107 Minuten. Die Genauigkeit der Berechnung der Koordinaten der Quelle in den Systemen der ersten Generation hängt weitgehend von dem Fehler bei der Bestimmung der Geschwindigkeit der Quelle ab. Wenn also die Objektgeschwindigkeit mit einem Fehler von 0,5 m bestimmt wird, führt dies wiederum zu einem Fehler bei der Bestimmung der Koordinaten von ~ 500 m. Bei einem stationären Objekt sinkt dieser Wert auf 50 m.
Außerdem ist bei diesen Systemen kein kontinuierlicher Betrieb möglich. Aufgrund der Tatsache, dass sich die Systeme im niedrigen Orbit befinden, überschreitet die Zeit, während der sich der Satellit im Sichtfeld des Verbrauchers befindet, eine Stunde nicht. Außerdem hängt die Zeit zwischen dem Durchlaufen verschiedener Satelliten in der Sichtbarkeitszone eines Verbrauchers von der geographischen Breite ab, in der er sich befindet, und kann zwischen 35 und 90 Minuten betragen. Das Verringern dieses Intervalls durch Erhöhen der Anzahl von Satelliten ist unmöglich, da alle Satelliten Signale mit der gleichen Frequenz senden.
Folglich haben die Satellitennavigationssysteme der zweiten Generation eine Reihe erheblicher Nachteile. An erster Stelle - die mangelnde Genauigkeit bei der Bestimmung der Koordinaten von dynamischen Objekten. Der Nachteil ist auch auf die mangelnde Kontinuität der Messungen zurückzuführen.
Eines der Hauptprobleme beim Erstellen von Satellitensystemen, die Navigationsdefinitionen für mehrere Satelliten bereitstellen, ist die gegenseitige Synchronisation von Satellitensignalen (Zeitskalen) mit der erforderlichen Genauigkeit. Die Nichtübereinstimmung der Referenzsatellitengeneratoren bei 10 ns führt zu einem Fehler bei der Bestimmung der Koordinaten des Verbrauchers 10 ± 15 m. Das zweite Problem, mit dem Entwickler bei der Entwicklung von Satellitennavigationssystemen mit hoher Umlaufbahn konfrontiert waren, war die hochpräzise Bestimmung und Vorhersage der Parameter der Satellitenumlaufbahnen. Das Gerät des Empfängers, das die Verzögerungen von Signalen verschiedener Satelliten misst, berechnet die Koordinaten des Verbrauchers.
Zu diesem Zweck entwickelte die US Navy 1967 ein Programm, mit dem der Satellit TIMATION-I und 1969 der Satellit TIMATION-II gestartet wurde. An Bord dieser Satelliten wurden Quarzoszillatoren verwendet. Zur gleichen Zeit führte die Luftwaffe der Vereinigten Staaten gleichzeitig ein Programm zur Verwendung von Breitbandsignalen durch, die durch einen Pseudo-Noise-Code (PRN) moduliert wurden. Die Korrelationseigenschaften eines solchen Codes erlauben die Verwendung einer Signalfrequenz für alle Satelliten mit einer Codetrennung von Signalen von verschiedenen Satelliten. Später, 1973, wurden die beiden Programme zu einem gemeinsamen Programm namens "Navstar-GPS" zusammengefasst. Bis 1996 war der Einsatz des Systems abgeschlossen. Derzeit sind 28 aktive Satelliten verfügbar.
In der UdSSR begannen 1982 mit dem Start des Satelliten Cosmos-1413 die Flugtests des Satellitennavigationssystems Glonass mit hohem Orbit. Der Hauptentwickler und Schöpfer des Systems als Ganzes und im Weltraumsegment ist das NPO von Applied Mechanics (Krasnoyarsk), und das Navigationsraumfahrzeug ist die Polet-Software (Omsk). Der führende Entwickler von Funksystemen ist RNIIKP; Das Russische Institut für Funknavigation und Zeit wurde für die Schaffung eines Zeitkomplexes, eines Synchronisationssystems und eines Navigationsgeräts für Verbraucher verantwortlich gemacht.
Glonass-Netzwer(SRNSS)
Das Glonass-System ist für die globale Navigation von sich bewegenden Objekten konzipiert. SRNSS entwickelt im Auftrag des Verteidigungsministeriums. Glonass und GPS gelten in seiner Struktur als duales System, dh es kann sowohl für militärische als auch für zivile Zwecke verwendet werden.
Das System umfasst insgesamt drei Funktionsteile (in der Fachliteratur werden diese als Segmente bezeichnet) (Abb. 1).
Abbildung 1. Segmente der Hochbahn-Navigationssysteme Glonass und GPS
das Weltraumsegment, das die Umlaufgruppierung von künstlichen Erdsatelliten (mit anderen Worten Navigationsraumfahrzeugen) umfasst;
kontrollsegment, Bodenkontrollkomplex (NKU) der Orbitalgruppe von Raumfahrzeugen;
gerätebenutzer des Systems.
Von diesen drei Teilen ist der letztere, das Benutzergerät, am zahlreichsten. Das Glonass-System ist abfragefrei, sodass die Anzahl der Benutzer des Systems keine Rolle spielt. Neben der Hauptfunktion - Navigationsdefinitionen - ermöglicht das System eine hochgenaue gegenseitige Synchronisation von Frequenz- und Zeitstandards bei entfernten Bodenobjekten und gegenseitige geodätische Referenzierung. Darüber hinaus kann es verwendet werden, um die Orientierung eines Objekts basierend auf Messungen zu bestimmen, die von vier Empfängern von Signalen von Navigationssatelliten gemacht werden.
Im Glonass-System werden in einer kreisförmigen geostationären Umlaufbahn in einer Höhe von ~ 19.100 km drehende Navigationssatelliten (NKA) als Funknavigationsstation in einer Höhe von ~ 19.100 km verwendet (Abb. 2). Die Umlaufzeit eines Satelliten um die Erde beträgt im Durchschnitt 11 Stunden und 45 Minuten. Die Betriebszeit des Satelliten beträgt ≈ 5 Jahre, während dieser Zeit sollten die Parameter seines Orbits nicht mehr als 5% von den Nennwerten abweichen. Der Satellit selbst ist ein hermetischer Container mit einem Durchmesser von 1,35 m und einer Länge von 7,84 m, in dem verschiedene Geräte untergebracht sind. Alle Systeme werden mit Sonnenkollektoren betrieben. Die Gesamtmasse des Satelliten - 1415 kg. Die Ausrüstung an Bord umfasst: einen Onboard-Navigationssender, einen Chronizer (Uhr), ein Onboard-Steuersystem, ein Orientierungs- und Stabilisierungssystem und so weiter.
Abbildung 2. Das Weltraumsegment der GLONASS- und GPS-Systeme
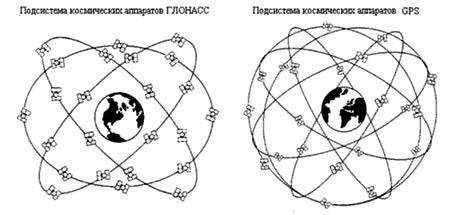
Abbildung 3. Segment des Bodenkontrollkomplexes des Glonass-Systems
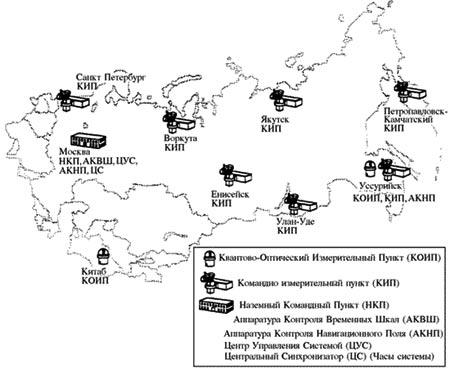
Abbildung 4. Komplexes Segment für GPS-Bodensteuerung
Das GLONASS Bodenkontrollkomplex-Segment erfüllt die folgenden Funktionen:
ephemeriden- und Zeitfrequenzunterstützung;
Überwachung des Radionavigationsfeldes;
Überwachung der Radiotelemetrie;
befehls- und Programmfunksteuerung NKA.
Um die Zeitskalen verschiedener Satelliten an Bord der NKA mit der erforderlichen Genauigkeit zu synchronisieren, werden Cäsium-Frequenzstandards mit relativer Instabilität in der Größenordnung von 10–13 verwendet. Auf dem Bodenkontrollkomplex wird der Wasserstoffstandard mit einer relativen Instabilität von 10-14 verwendet. Zusätzlich enthält die NKU Mittel zum Korrigieren von Satellitenzeitskalen relativ zu der Referenzskala mit einem Fehler von 3 ± 5 ns.
Das Bodensegment bietet Unterstützung für Ephemeriden-Satelliten. Dies bedeutet, dass die Parameter der Bewegung von Satelliten auf der Erde bestimmt werden und die Werte dieser Parameter für eine vorbestimmte Zeitdauer vorhergesagt werden. Die Parameter und ihre Prognose werden zusammen mit der Übertragung des Navigationssignals in die vom Satelliten übertragene Navigationsnachricht gelegt. Dazu gehören auch die Frequenz-Zeit-Korrekturen der Zeitskala des Satelliten relativ zur Systemzeit. Die Messung und Prognose der Bewegungsparameter des NKA werden im ballistischen Zentrum des Systems auf der Grundlage der Ergebnisse von Flugbahnmessungen der Entfernung zum Satelliten und seiner Radialgeschwindigkeit durchgeführt.
Netzwerk GPS-Navigationssatellitensystem
Das amerikanische GPS-System ähnelt in seiner Funktionalität dem inländischen Glonass-System. Sein Hauptzweck ist die genaue Bestimmung der Koordinaten des Verbrauchers, der Komponenten des Geschwindigkeitsvektors und die Bindung an die Systemzeitskala. Ähnlich wie im Inland wurde das GPS-System für das US-Verteidigungsministerium entwickelt und steht unter seiner Kontrolle. Laut dem Interface-Control-Dokument sind die wichtigsten Entwickler des Systems:
für das Weltraumsegment - Rockwell International Space Division, Martin Marietta Astro Space Division;
managementsegment - IBM, Federal System Company;
nach Verbrauchersegmenten - Rockwell International, Collins Avio-nics & Communication Division.
GPS besteht wie das Glonass-System aus einem Weltraumsegment, einem bodengestützten Befehlsmesskomplex und einem Verbrauchersegment.
Wie oben erwähnt, besteht die GPS-Orbitalkonstellation aus 28 Navigationssonden. Alle sind in kreisförmigen Umlaufbahnen mit einer Umlaufzeit von 12 Stunden um die Erde. Die Umlaufbahnhöhe jedes Satelliten beträgt ~ 20.000 km. Die NCAs des GPS-Systems wurden einer Reihe von Verbesserungen unterzogen, die sich auf ihre Leistung im Allgemeinen auswirkten. In tab. 1 zeigt die kurzen Eigenschaften des in dem System verwendeten Raumfahrzeugs.
Tabelle 1. Eigenschaften des im GPS-System verwendeten Raumfahrzeugs
|
Masse im Orbit |
Energie von Energiequellen, W |
Geschätztes aktives Leben |
Gründungsjahr der ersten NCA |
|
Tabelle 2. Vergleichende Merkmale der GLONASS- und GPS-Systeme
|
Anzeige | ||
|
Anzahl der Raumfahrzeuge in voller Orbitalgruppierung | ||
|
Die Anzahl der Umlaufbahnen | ||
|
Die Anzahl der Raumfahrzeuge in jeder Ebene | ||
|
Bahnneigung | ||
|
Bahnhöhe, km | ||
|
Satellitenrotationsperiode |
11 h 15 min 44 s |
11 h 58 min 00 s |
|
Koordinatensystem | ||
|
Masse des Navigationssatelliten, kg | ||
|
Solarenergie, W | ||
|
Der Begriff der aktiven Existenz, Jahre | ||
|
Mittel zum Starten eines Raumfahrzeugs in die Umlaufbahn |
"Proton-K / DM" | |
|
Die Anzahl der pro Start angezeigten Raumfahrzeuge | ||
|
Kosmodrom |
Baikonur (Kasachstan) |
Kap Canaveral (Kap Canaveral) |
|
Bezugszeit | ||
|
Zugriffsmethode | ||
|
Trägerfrequenz: L1 L2 |
1598.06251604.25 7/9 L1 |
1575.42 60/77 L1 |
|
Polarisation |
Rechtsseitig |
Rechtsseitig |
|
Geben Sie eine Pseudo-Noise-Sequenz ein |
m-Sequenz |
goldcode |
|
Anzahl der Codepunkte: C / A P | ||
|
Codierrate, Mbps: C / A P | ||
|
Der Pegel der internen Systemstörungen, dB | ||
|
Navigationsnachrichtenstruktur |
||
|
Baudrate, bps | ||
|
Modulationstyp |
BPSK (Manchester) | |
|
Superrahmenlänge, min. |
2,5 (5 Bilder) |
12,5 (25 Bilder) |
|
Rahmenlänge mit |
30 (15 Zeilen) |
30 (5 Zeilen) |
|
Leitungslänge mit | ||
Bei der Konzeption des Gesamtsystems und insbesondere der NCA wird den Fragen des autonomen Betriebs viel Aufmerksamkeit gewidmet. Das Raumfahrzeug der ersten Generation (Block I) stellte somit den normalen Betrieb des Systems (dh ohne signifikante Fehler bei der Koordinatenbestimmung) ohne Eingriff des Kontrollsegments für 3–4 Tage sicher. Bei Block II-Geräten wurde dieser Zeitraum auf 14 Tage verlängert. In der neuen Modifikation der NKA ermöglicht der Block-IIR einen autonomen Betrieb für 180 Tage, ohne die Orbitalparameter vom Boden aus anzupassen. Dabei wird nur der autonome Komplex der gegenseitigen Synchronisation von Satelliten verwendet. Die Geräte des Block-IIF sollten anstelle des verbrauchten Block-IIR verwendet werden.
Aufbau des Navigationsfunksignalsystems Glonass
Das Glonass-System verwendet die Frequenztrennung von Signalen (FDMA), die von jedem Satelliten ausgegeben werden - zwei phasenverschobene Signale. Die Frequenz des ersten Signals liegt im Bereich von L1 bis 1600 MHz und die Frequenz des zweiten Signals im Bereich von L2 bis 1250 MHz. Die Nennwerte der Betriebsfrequenzen der im L1- und L2-Band übertragenen Funksignale werden durch den Ausdruck definiert:
f k1 = f 1 + kf 1 f k2 = f 2 + kf 2 k = 0,1, ..., 24, (1)
wobei k = 0,1, ..., 24 - Anzahl von Buchstaben (Kanälen) der Betriebsfrequenzen von Satelliten;
f 1 = 1602 MHz; f 1 = 9/16 = 0,5625 MHz; f 2 = 1246 MHz; f 2 = 7/16 = 0,4375 MHz.
Für jeden Satelliten sind die Betriebsfrequenzen der Signale im L1- und L2-Bereich kohärent und werden aus einer einzigen Frequenzreferenz gebildet. Das Verhältnis der Betriebsfrequenzen des Trägers jedes Satelliten:
f k1 / f k2 = 7/9.
Die Nennfrequenz des Generators an Bord beträgt aus Sicht des auf der Erdoberfläche befindlichen Beobachters 5,0 MHz.
Im L1-Band strahlt jeder Satellit des Glonass-Systems 2 Träger mit der gleichen Frequenz aus, die um 90º gegeneinander phasenverschoben sind (Fig. 5).
Abbildung 5. Vektordiagramm der Trägersignale von GLONASS- und GPS-Systemen
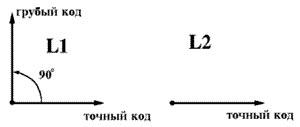
Einer der Träger wird bei 180º einer Phasenmanipulation unterzogen. Das Modulationssignal wird durch Addition der drei binären Signale von Modulo 2 erhalten (Fig. 6):
einen mit einer Geschwindigkeit von 511 kbit / s übertragenen Code für einen groben Entfernungsbereich (Fig. 6c);
sequenzen von Navigationsdaten, die mit 50 Bit / s übertragen werden (Fig. 6a);
mäanderoszillationen, die mit einer Geschwindigkeit von 100 bps übertragen werden (6b).
Abbildung 6. Die Struktur des GLONASS-Signals
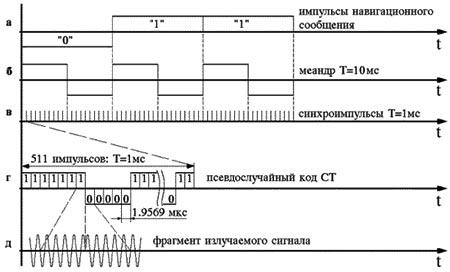
Das Signal im L1-Bereich (ähnlich dem C / A-Code bei GPS) steht allen Verbrauchern im Sichtfeld des Raumfahrzeugs zur Verfügung. Das Signal im L2-Bereich ist für militärische Zwecke gedacht und seine Struktur ist nicht bekannt.
Zusammensetzung und Struktur der Navigationsnachrichten von Glonass-Satelliten
Die Navigationsnachricht wird in Form von fortlaufend folgenden Zeilen mit jeweils 2 Sekunden Länge gebildet. Im ersten Teil der Zeile (Intervall 1,7 s) werden die Navigationsdaten und im zweiten Teil (0,3 s) der Zeitstempel übertragen. Es ist eine verkürzte Pseudozufallssequenz bestehend aus 30 Symbolen mit einer Taktfrequenz von 100 bps.
Die Navigationsnachrichten der Glonass-Satelliten werden von Verbrauchern für Navigationsdefinitionen und für die Planung von Kommunikationssitzungen mit Satelliten benötigt. Die Navigationsnachrichten sind entsprechend ihrem Inhalt in betriebliche und nichtbetriebliche Informationen unterteilt.
Betriebsinformationen beziehen sich auf den Satelliten, von dessen Signal er empfangen wurde. Zu den Betriebsinformationen gehören:
zeitstempelung;
relative Differenz zwischen der Satellitenträgerfrequenz und dem Nennwert;
ephemeriden-Informationen.
Die Bindungszeit der Ephemeriden-Informationen und Frequenz-Zeit-Korrekturen, die seit Beginn des Tages eine halbe Stundenmultiplizität aufweisen, ermöglichen eine genaue Bestimmung der geographischen Koordinaten und der Geschwindigkeit des Satelliten.
Nichtoperative Informationen enthalten einen Almanach, einschließlich:
daten zum Status aller Satelliten des Systems;
relativ zur Systemskala;
bahnparameter aller Satelliten des Systems;
Änderung der Zeitskala des Glonass-Systems.
Die Wahl der optimalen "Konstellation" des Raumfahrzeugs und die Vorhersage der Doppler-Verschiebung der Trägerfrequenz erfolgt durch Analyse des Almanachs des Systems.
Die Navigationsnachrichten der Satelliten des Glonass-Systems sind als Superframes mit einer Dauer von 2,5 Minuten strukturiert. Ein Superframe besteht aus fünf Frames mit einer Dauer von 30 s. Jeder Frame enthält 15 Zeilen mit einer Dauer von 2 Sekunden. Ab 2 Sekunden benötigen die letzten 0,3 Sekunden den Zeitstempel. Der Rest der Zeile enthält 85 Zeichen digitaler Informationen, die mit 50 Hz übertragen werden.
Jeder Frame enthält die vollständige Menge an Betriebsinformationen und einen Teil des Almanachs des Systems. Vollalmanach im gesamten Superrahmen enthalten. Zur gleichen Zeit bezieht sich die Information des Superframes, die in den Zeilen 1√4 enthalten ist, auf den Satelliten, von dem er kommt (der Betriebsteil), und ändert sich innerhalb des Superframes nicht.
GPS-Navigationsradiostruktur
GPS verwendet die Code-Division von Signalen (CDMA), sodass alle Satelliten Signale mit der gleichen Frequenz senden. Jeder GPS-Satellit sendet zwei phasenverschobene Signale aus. Die Frequenz des ersten Signals beträgt L1 = 1575,42 MHz und die zweite - L2 = 1227,6 MHz. Das Trägerfrequenzsignal L1 wird durch zwei binäre Sequenzen moduliert, von denen jede durch Modulo-2-Addition des Entfernungsbereichscodes und des übertragenen Systems und der mit 50 Bit / s erzeugten Navigationsdaten gebildet wird. Bei der L1-Frequenz werden zwei Quadraturkomponenten übertragen, die durch binäre Sequenzen biphasisch manipuliert werden. Die erste Sequenz ist die Summe Modulo 2 des genauen Bereichscodes P oder des geheimen Y-Codes und der Navigationsdaten. Die zweite Sequenz ist auch eine Modulo-2-Summe aus dem groben C / A-Code (offenem Code) und derselben Navigationsdatensequenz.
Das Funksignal auf der L2-Frequenz wird nur von einer der beiden zuvor betrachteten Sequenzen biphasisch manipuliert. Die Auswahl der Modulationssequenz erfolgt durch einen Befehl von der Erde.
Jeder Satellit verwendet die nur ihm eigenen Abstandscodes C / A und P (Y), wodurch es möglich ist, Satellitensignale zu trennen. Beim Bilden des exakten Entfernungs-P (Y) -Codes werden gleichzeitig Satellitenzeitstempel erzeugt.
Zusammensetzung und Struktur von Navigationsnachrichten von GPS-Satelliten
Die strukturelle Unterteilung der Navigationsinformationen von GPS-Satelliten erfolgt in Superframes, Frames, Subframes und Wörtern. Ein Superframe besteht aus 25 Frames und dauert 750 s (12,5 min). Ein Frame wird 30 Sekunden lang übertragen und ist 1500 Bit groß. Der Frame ist in 5 Subframes mit jeweils 300 Bit unterteilt und wird während des Intervalls von 6 Sekunden übertragen. Der Beginn jedes Unterrahmens zeigt den Zeitstempel an, der dem Beginn / Ende des nächsten 6-Sekunden-GPS-Systemzeitintervalls entspricht. Podcat besteht aus 10 30-Bit-Wörtern. In jedem Wort sind die 6 niedrigstwertigen Bits die Prüfbits.
Im 1., 2. und 3. Unterrahmen werden die Daten zu den Korrekturparametern der Uhr und die Ephemeriden-Daten des KA, mit dem die Verbindung hergestellt wird, übertragen. Inhalt und Struktur dieser Subframes bleiben auf allen Seiten des Superframes unverändert. Der 4. und 5. Unterrahmen enthalten Informationen zur Konfiguration und zum Status aller Raumfahrzeugsysteme, Almanache des Weltraumfahrzeugs, Sondermeldungen, Parameter, die die Beziehung zwischen der GPS-Zeit und der UTC usw. beschreiben.
Algorithmen zum Empfangen und Messen von Parametern von Satellitennavigationssignalen
Zu den Verbrauchern von GPS- und GLONASS-Systemen zählen Satellitensignalempfänger. Durch die Messung der Parameter dieser Signale wird das Navigationsproblem gelöst. Der Empfänger kann in drei Funktionsteile unterteilt werden:
hochfrequenzteil;
digitaler Korrelator;
prozessor
Von dem Ausgang der Antenneneinspeisungseinrichtung (Antenne) geht das Signal zum Hochfrequenzteil (Fig. 7). Das Hauptziel dieses Teils ist die Verstärkung des Eingangssignals, der Filterung, der Frequenzkonvertierung und der Analog-Digital-Konvertierung. Zusätzlich empfängt der Radiofrequenzteil des Empfängers die Taktfrequenz für den digitalen Teil des Empfängers. Vom Ausgang des Radiofrequenzteils werden digitale Abtastwerte des Eingangssignals dem Eingang eines digitalen Korrelators zugeführt.
Abbildung 7. Verallgemeinerte Empfängerstruktur
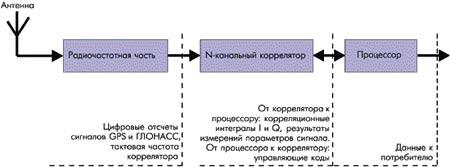
Im Korrelator wird das Signalspektrum auf die "Null" -Frequenz übertragen. Dies geschieht durch Multiplikation des Eingangssignals des Korrelators mit der harmonischen Referenzschwingung in den Inphase- und Quadraturkanälen. Als Nächstes durchläuft das Ergebnis der Multiplikation die Korrelationsverarbeitung durch Multiplizieren mit dem Referenzbereichscode und Akkumulieren der Periode des Bereichscodes. Als Ergebnis erhalten wir die Korrelationsintegrale I und Q. Die Korrelationsintegrale werden dem Prozessor zur weiteren Verarbeitung und zum Verriegeln der PLL-Schleifen (Phasenregelschleife) und der CVDs (Verzögerungsverfolgungsschaltung) zugeführt. Die Messung der Signalparameter im Empfänger erfolgt nicht direkt aus dem Eingangssignal, sondern aus der exakten Kopie, die von den PLL- und CVD-Systemen gebildet wird. Die Korrelationsintegrale I und Q ermöglichen es, den Grad der "Ähnlichkeit" (Korrelation) der Referenz- und Eingangssignale abzuschätzen. Die Aufgabe des Korrelators besteht neben der Bildung der Integrale I und Q darin, ein Bezugssignal entsprechend den vom Prozessor kommenden Steueraktionen (Steuercodes) zu bilden. Zusätzlich erzeugt der Korrelator in einigen Empfängern die notwendigen Messungen der Referenzsignale und überträgt sie zur weiteren Verarbeitung an den Prozessor. Gleichzeitig können, da die Referenzsignale im Korrelator aus den von dem Prozessor empfangenen Steuercodes erzeugt werden, die erforderlichen Messungen der Referenzsignale direkt im Prozessor durchgeführt werden, wobei die Steuercodes entsprechend verarbeitet werden, was in vielen modernen Empfängern erfolgt.
Welche Signalparameter misst der Korrelator (Prozessor)?
Die Reichweite für Funkmessungen ist durch die Laufzeit des Signals vom Messobjekt zum Messpunkt gekennzeichnet. In GPS / GLONASS-Navigationssystemen wird die Aussendung von Signalen mit der Zeitskala des Systems synchronisiert, genauer mit der Zeitskala des dieses Signal emittierenden Satelliten. Gleichzeitig hat der Verbraucher Informationen über die Diskrepanz zwischen der Zeitskala des Satelliten und dem System. Mit digitalen Informationen, die vom Satelliten übertragen werden, können Sie den Zeitpunkt der Aussendung eines bestimmten Teils des Signals (Zeitstempel) durch den Satelliten in der Systemzeit einstellen. Der Zeitpunkt des Empfangs dieses Fragments wird durch die Zeitskala des Empfängers bestimmt. Die Zeitskala des Empfängers (Verbrauchers) wird unter Verwendung von Quarzfrequenzstandards gebildet, daher gibt es eine konstante "Abweichung" der Zeitskala des Empfängers relativ zur Zeitskala des Systems. Die Differenz zwischen dem Moment des Empfangs eines Fragmentes eines Signals, gerechnet auf der Zeitskala des Empfängers, und dem Moment der Strahlung seines Satelliten, gerechnet auf der Skala des Satelliten, multipliziert mit der Lichtgeschwindigkeit, wird als Pseudoentfernung bezeichnet. Warum Pseudoabstand? Denn es unterscheidet sich von dem wahren Bereich um einen Betrag, der dem Produkt der Lichtgeschwindigkeit um den "Abflug" der Empfängerzeitskala relativ zur Systemzeitskala entspricht. Bei der Lösung eines Navigationsproblems wird dieser Parameter zusammen mit den Koordinaten des Verbrauchers (Empfängers) bestimmt.
Die im Korrelator gebildeten Korrelationsintegrale ermöglichen es, die Modulation des Satellitensignals mit Informationssymbolen zu verfolgen und den Zeitstempel im Eingangssignal zu berechnen. Zeitstempel folgen mit einer Frequenz von 6 s für GPS und 2 s für GLONASS und bilden eine Art Skala von 6 (2) Sekunden. Innerhalb der Grenzen einer Division dieser Skala bilden die Perioden des Entfernungscodes eine 1-ms-Skala. Eine Millisekunde ist wiederum in einzelne Elemente (Chips in GPS-Terminologie) unterteilt: für GPS-1023, für GLONASS-511. Somit können Sie mit den Elementen des Entfernungscodes die Entfernung zum Satelliten mit einem Fehler von ~ 300 m ermitteln, um eine genauere Bestimmung zu erhalten Es ist notwendig, die Phase des Entfernungscode-Generators zu kennen. Die Schemata zum Aufbau der Referenzgeneratoren des Korrelators ermöglichen es, seine Phase mit einer Genauigkeit von 0,01 Perioden zu bestimmen, was die Genauigkeit der Bestimmung der Pseudoentfernung von 3 m ist.
Bestimmen Sie anhand von Messungen der Parameter der vom PLL-System erzeugten harmonischen Referenzschwingung Frequenz und Phase der Trägerschwingung des Satelliten. Seine Abweichung relativ zum Nominalwert ergibt den Dopplerfrequenzversatz, der zur Abschätzung der Geschwindigkeit des Benutzers relativ zum Satelliten verwendet wird. Darüber hinaus ermöglichen die Trägerphasenmessungen die Bestimmung der Entfernung zum Satelliten mit einem Fehler von mehreren mm.
Bestimmung der Koordinaten des Verbrauchers
Um die Koordinaten des Verbrauchers zu bestimmen, müssen die Koordinaten der Satelliten (mindestens 4) und die Entfernung des Verbrauchers zu jedem sichtbaren Satelliten bekannt sein. Damit der Verbraucher die Koordinaten der Satelliten bestimmen kann, werden die von ihnen ausgesendeten Navigationssignale durch Meldungen über die Parameter ihrer Bewegung modelliert. In der Ausrüstung des Verbrauchers gibt es eine Auswahl dieser Nachrichten und die Bestimmung der Koordinaten der Satelliten zum richtigen Zeitpunkt.
Die Koordinaten und Komponenten des Geschwindigkeitsvektors ändern sich sehr schnell, so dass die Meldungen zu den Satellitenbewegungsparametern Informationen nicht über ihre Koordinaten und Genthalten, sondern Informationen über die Parameter eines bestimmten Modells, das sich der Bewegungsbahn des Raumfahrzeugs über einen ausreichend langen Zeitraum (etwa 30 Minuten) nähert. Die Parameter des Näherungsmodells variieren relativ langsam und können über das Näherungsintervall als konstant betrachtet werden.
Die Parameter des Näherungsmodells sind in den Satellitennavigationsnachrichten enthalten. Das GPS-System verwendet das Kepler-Bewegungsmodell mit Oszillationselementen. In diesem Fall wird die Flugbahn des Raumfahrzeugs in Näherungsbereiche von einer Stunde Dauer unterteilt. In der Mitte jedes Abschnitts wird ein Knotenzeitpunkt eingestellt, dessen Wert dem Benutzer von Navigationsinformationen mitgeteilt wird. Außerdem wird der Verbraucher über die Parameter des Modells von Oszillationselementen zu einem Knotenzeitpunkt sowie über die Parameter von Funktionen informiert, die Änderungen in den Parametern des Modells von Oszillationselementen zeitlich sowohl des vorherigen Knotenelements als auch des nachfolgenden Elements annähern.
In der Ausrüstung des Verbrauchers wird das Zeitintervall zwischen dem Zeitpunkt, zu dem die Position des Satelliten bestimmt werden soll, und dem Knotenmoment unterschieden. Dann werden unter Verwendung der Näherungsfunktionen und ihrer aus der Navigationsnachricht extrahierten Parameter die Werte der Parameter des Modells von Oszillationselementen zum gewünschten Zeitpunkt berechnet. In der letzten Stufe werden die Koordinaten und Komponenten des Sunter Verwendung der üblichen Kepler-Modellformeln bestimmt.
Im Glonass-System werden differenzielle Bewegungsmodelle verwendet, um die genaue Position des Satelliten zu bestimmen. In diesen Modellen werden die Koordinaten und Komponenten des Sdurch numerische Integration der Differentialgleichungen der Raumfahrzeugbewegung unter Berücksichtigung der endlichen Anzahl von auf das Weltraumfahrzeug wirkenden Kräften bestimmt. Die Anfangsintegrationsbedingungen werden zu einem Knotenpunkt angegeben, der sich in der Mitte des Approximationsintervalls befindet.
Wie oben erwähnt, ist es zur Bestimmung der Koordinaten des Verbrauchers erforderlich, die Koordinaten der Satelliten (mindestens 4) und die Entfernung des Verbrauchers zu jedem sichtbaren Satelliten zu kennen, die im Navigationsempfänger mit einer Genauigkeit von etwa 1 m bestimmt wird . 8
Abbildung 8. Bestimmung der Koordinaten des Verbrauchers
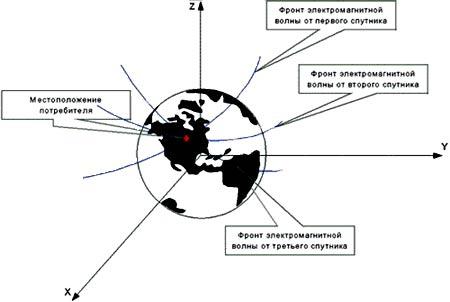
Jeder Satellit (Abb. 8) kann als Punktsender dargestellt werden. In diesem Fall ist die Vorderseite der elektromagnetischen Welle sphärisch. Der Schnittpunkt der beiden Kugeln ist derjenige, in dem sich der Verbraucher befindet.
Die Höhe der Satellitenbahnen beträgt ungefähr 20.000 km. Folglich kann der zweite Schnittpunkt der Kreise aufgrund von Informationen von vornherein abgelehnt werden, da er weit im Raum liegt.
Differentialmodus
Satellitennavigationssysteme ermöglichen es dem Verbraucher, Koordinaten mit einer Genauigkeit von etwa 10 bis 15 m zu erhalten, jedoch ist für viele Aufgaben, insbesondere für die Navigation in Städten, eine höhere Genauigkeit erforderlich. Eine der Hauptmethoden zur Verbesserung der Genauigkeit der Positionsbestimmung eines Objekts basiert auf der Anwendung des in der Funknavigation bekannten Prinzips differenzieller Navigationsmessungen.
Differentialmodus Mit DGPS (Differential GPS) können Sie die Koordinaten in einer dynamischen Navigationsumgebung mit einer Genauigkeit von 3 m und im stationären Betrieb bis zu 1 m einstellen. Der differentielle Modus wird unter Verwendung eines Steuer-GPS-Empfängers implementiert, der als Referenzstation bezeichnet wird. Es befindet sich an einem Punkt mit bekannten Koordinaten im selben Bereich wie der Haupt-GPS-Empfänger. Durch den Vergleich der bekannten Koordinaten (die als Ergebnis einer präzisen geodätischen Vermessung erhalten werden) mit den gemessenen Werten, berechnet die Referenzstation die Korrekturen, die in einem vorbestimmten Format über die Luft an die Verbraucher übermittelt werden.
Die Ausrüstung des Verbrauchers erhält differenzielle Korrekturen von der Referenzstation und berücksichtigt sie bei der Standortbestimmung des Verbrauchers.
Die mit der Differentialmethode erzielten Ergebnisse hängen weitgehend von der Entfernung zwischen Objekt und Referenzstation ab. Die Anwendung dieser Methode ist am effektivsten, wenn systematische Fehler aufgrund äußerer (in Bezug auf den Empfänger) Ursachen auftreten. Versuchsdaten zufolge wird empfohlen, die Referenzstation nicht mehr als 500 km vom Objekt entfernt zu haben.
Derzeit gibt es viele weiträumige, regionale und lokale Differenzsysteme.
Solche Systeme wie das amerikanische WAAS, das europäische EGNOS und das japanische MSAS sind eine große Lücke. Diese Systeme verwenden geostationäre Satelliten, um Korrekturen an alle Verbraucher in ihrem Abdeckungsbereich zu übermitteln.
Regionale Systeme dienen der Navigationsunterstützung bestimmter Bereiche der Erdoberfläche. Typischerweise werden regionale Systeme in Großstädten, auf Autobahnen und schiffbaren Flüssen, in Häfen und entlang der Küste von Meeren und Ozeanen eingesetzt. Der Arbeitsbereich des regionalen Systems hat normalerweise einen Durchmesser von 500 bis 2000 km. Es kann eine oder mehrere Referenzstationen haben.
Lokale Systeme haben eine maximale Reichweite von 50 bis 220 km. Diese umfassen normalerweise eine Basisstation. Lokale Systeme werden normalerweise nach der Art ihrer Anwendung aufgeteilt: Marine, Luftfahrt und geodätische lokale Differenzstationen.
Die Entwicklung der Satellitennavigation
Die allgemeine Richtung der Modernisierung sowohl von GPS- als auch von Glonass-Satellitensystemen bezieht sich auf die Verbesserung der Genauigkeit der Navigationsdefinitionen, die Verbesserung des für die Benutzer bereitgestellten Dienstes, die Erhöhung der Lebensdauer und Zuverlässigkeit der bordeigenen Satellitenausrüstung, die Verbesserung der Kompatibilität mit anderen Funksystemen und die Entwicklung differenzieller Subsysteme. Die allgemeine Entwicklungsrichtung von GPS-Systemen und Glonass ist die gleiche, aber die Dynamik und die erzielten Ergebnisse sind sehr unterschiedlich.
Die Verbesserung des GLONASS-Systems soll auf Basis der neuen Generation der GLONASS-M-Satelliten erfolgen. Dieser Satellit hat eine längere Lebensdauer und sendet ein Navigationssignal im L2-Bereich für zivile Anwendungen.
Eine ähnliche Entscheidung wurde in den Vereinigten Staaten getroffen, wo am 5. Januar 1999 angekündigt wurde, 400 Millionen US-Dollar für die Aufrüstung des GPS-Systems bereitzustellen, das mit der Übertragung des C / A-Codes auf der Frequenz L2 (1222,7 MHz) und der Einführung des dritten Beförderers L3 (1176) verbunden ist. 45 MHz) auf Satelliten, die ab 2005 starten werden. Das Signal auf der L2-Frequenz soll für zivile Zwecke verwendet werden, die nicht in direktem Zusammenhang mit der Gefahr für Menschen stehen. Es wird vorgeschlagen, mit der Umsetzung dieses Beschlusses im Jahr 2003 zu beginnen. Es wurde beschlossen, das dritte zivile Signal auf der Frequenz L3 für die Bedürfnisse der Zivilluftfahrt zu nutzen.
Literatur
Funksysteme. Ed. Kazarinova Yu.M. M .: Higher School, 1990.
Yu.A. Soloviev Satellitennavigationssysteme. M .: Eco-Trendz, 2000.
Globales Satellitennavigationssystem GLONASS / Ed. V.N. Harisova, A.I. Perova, V.A. Boldin. M .: IPRZHR, 1998.
Lipkin I.A. Satellitennavigationssysteme. M .: Universitätsbuch, 2001.
Globales Navigationssatellitensystem GLONASS. Schnittstellenkontrolldokument. M .: KNITS VKS, 1995.
Dokument zur Schnittstellensteuerung: NAVSTAR GPS-Weltraumsegment- / Navigations-Benutzeroberflächen (ICD-GPS-200).Rockwell Int. Corp. 1987