지구 항법 위성 시스템 보고서
글로벌 네비게이션 위성 시스템 (GLONASS, English GLONASS)은 러시아 위성 항법 시스템으로 육지, 해, 항공 및 우주 기반 사용자의 수, 무제한의 위치, 속도 및 정확한 시간을 결정합니다.
위성 항법 분야에서의 실제 작업의 시작에 대한 추진력은 1957 년 10 월 첫 번째 인공 지구 위성의 소련에서 성공적인 발사였다. 1960 년대 후반에 궤도 위성 위성 항법 시스템 "Cicada"가 소련에서 창안되었습니다.
해양 소비자에 의한 저궤도 위성 네비게이션 시스템의 성공적인 작동으로 위성 항법에 대한 관심이 높아지고있다. 압도적 인 잠재 고객의 요구를 충족시키는 보편적 인 네비게이션 시스템을 만들 필요가있었습니다.
1976 년 소련 정부는 그 개발에 관한 법령을 발표했다.
다자간 연구를 바탕으로 국내 전문가들은 공전 고도가 19,100 킬로미터 인 중 - 고도 근사 궤도에 위치한 24 개의 위성으로 이루어진 전임 궤도 별자리를 선택했다.
GLONASS 라 불리는 궤도의 높은 항법 시스템의 비행 시험은 1982 년 10 월 12 일 첫 번째 Glonass 우주선 (Cosmos-1413)의 출시로 시작되었습니다. 1993 년 9 월 24 일이 시스템은 제한된 수의 위성으로 구성된 궤도 별자리가있는 러시아 국방부의 이익을 위해 공식 가동되었다. 1995 년 12 월에 궤도 그 룹핑은 정규 직원 (24 개의 위성)에게 배치되었는데, 이는 전세계 전체를 포괄하는 데 필요합니다.
1990 년대에 우주 산업에 대한 자금 조달 감소로 인해 GLONASS 궤도 그룹의 성능이 저하되었습니다. 2002 년까지 7 개의 우주선 만 보유 할 수 있었으며, 최소한 GLONASS 시스템의 항법 신호는 러시아의 영토에 제공 할 수 없었습니다. 정확도는 미국 GPS 네비게이션 시스템에 비해 한 단계 이상 떨어졌습니다.
체제를 보존하고 발전시키기 위해 러시아 정부와 대통령에 의해 여러 정책 문서가 승인되었으며, 그 중 주요 목표는 2002-2012 년 연방 정부 목표 프로그램 인 글로벌 네비게이션 시스템 (Global Navigation System)이었다.
그것의 실시의 결과로, 궤도 분류는 완전히 복구되었다. 2012 년부터이 시스템은 새로운 연방 목표 프로그램 인 "2012-2020 년 GLONASS 시스템의 유지 보수, 개발 및 사용"의 틀 안에서 개발되어 국방, 안전 및 가까운 시일 내에 사회 경제적 영역의 발전을 위해 조정 시간 및 항법 지원 업무를 효율적으로 수행 할 수있게되었습니다. 그리고 먼 전망.
GLONASS 시스템은 우주선의 서브 시스템, 소비자의 모니터링 및 제어 및 내비게이션 장비의 하위 시스템으로 구성됩니다.
GLONASS 시스템의 기본은 각 비행기 8 대의 3 개의 궤도면에서 64.8 °의 각도로 적도에 기울고 19,100 킬로미터의 궤도 고도와 11 시간 15 분 44 초의 궤도 주기로 움직이는 24 개의 인공위성이다. 선택된 궤도 그룹 구조는 모든 우주선이 8 일 만에 지구 표면의 단일 경로를 따라 움직 이도록 보장합니다. 이러한 특성은 실제 존재하는 전체 기간 동안 우주선의 궤도를 수정하지 않고도 실제로 할 수있게하는 GLONASS 시스템의 궤도 그루핑의 높은 안정성을 제공합니다.
2017 년 10 월 10 일, GLONASS의 궤도 그룹은 25 개의 우주선을 가지고 있으며 그 중 23 개가 의도 된 목적으로 사용되었습니다.
GLONASS의 우주 위성은 Krasnoyarsk-26 (Zheleznogorsk)시에서 (지금은 Information Satellite Systems JSC가 학자 MF Reshetnev의 이름을 따서 명명되었습니다.)
글로 나스 (Glonass) 우주선이 가동 중이며, 3 년의 유효 보장 수명이 있습니다. 현재, 궤도 별자리의 기본은 수정 된 Glonass-M 시리즈의 인공위성으로 이루어져 있으며, 그 중 첫 번째 위성은 2003 년 12 월에 발사되었다. 그들은 1 세대 위성들과 달리 활동적인 존속 기간 (7 년)과 수입 부품의 사용 기간이 다릅니다. 그것은 새로운 세대 "Glonass-K"의 "Glonass-M"우주선을 최대 10 년의 수명으로 대체 할 계획입니다. 이 유형의 첫 우주선은 2014 년에 두 번째로 2011 년에 궤도에 진입했습니다.
현재, JSC "ISS"에서 고급 항법 위성 인 Glonass-K의 개발이 진행 중이다.
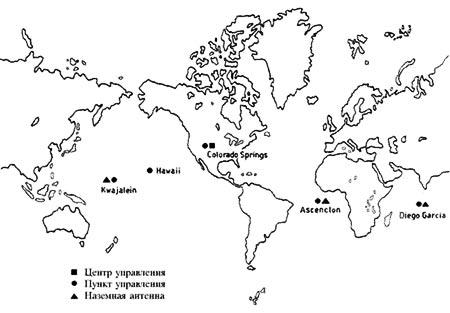
모니터링 및 제어 서브 시스템 (PKU)은 GLONASS 시스템 제어 센터와 러시아 전역에 분산 된 측정, 제어 및 모니터링 스테이션 네트워크로 구성됩니다. PKU의 임무는 우주선의 올바른 기능 감시, 궤도 매개 변수의 지속적인 개선 및 시간 프로그램의 위성 발급, 제어 명령 및 탐색 정보를 포함합니다.
소비자 네비게이션 장비는 GLONASS 위성으로부터 네비게이션 신호를 수신하고 자신의 좌표, 속도 및 시간을 계산하도록 설계된 네비게이션 수신기 및 처리 장치로 구성됩니다. GLONASS 소비자 네비게이션 장비는 네 개의 GLONASS 인공위성에 대한 요청없이 측정을 수행하고 네비게이션 메시지를 수신 및 처리합니다. 네비게이션 메시지는 시간과 공간에서 위성의 위치를 설명합니다. 수신 된 측정치 및 수신 된 네비게이션 메시지를 처리 한 결과로서, 소비자의 3 개의 좌표가 결정되고, 그의 움직임의 속도 벡터의 3 개의 성분, 및 소비자의 시간 척도의 주 표준시 UTC (SU)의 스케일에 대한 "바인딩"이 수행된다.
GLONASS 시스템은 18 개의 위성으로 0.95, 24 개의 위성으로 0.997의 확률로 표준 (L1) 및 고정밀 (L2) 신호를 사용하여 네비게이션 지원을위한 다양한 수준의 품질 요구 사항을 가진 모든 유형의 소비자를 지속적으로 글로벌 네비게이션 할 수 있습니다. 이중 용도 우주 기술과 관련이 있습니다.
현재 국영 기업인 "Roscosmos"와 러시아 부처는 국방부, 내무부, Rostechnadzor, 교통부, 연방 등록부, 산업 통상부, 러시아 표준, 연방 과학기구 (FANO) 등 GLONASS 프로젝트의 개발에 참여하고있다.
러시아 과학자들이 GLONASS 항행 장치의 정확도를 수 센티미터까지 높이기 위해 노력하고 있다고 기술 규제 및 계측 연맹 (러시아 표준) Alexey Abramov 의장 인 2017 년 여름에 그에 따르면, 미터 범위에 도달 할 때까지 (유리한 조건에서는 3 ~ 5 미터의 정확도로 물체의 위치를 결정할 수 있습니다).
2017 년 9 월 Dmitry Rogozin 부총리는 러시아의 GLONASS 시스템이 미국의 GPS보다 두 배나 우월하다고 주장했다. 블라디미르 푸틴 대통령은 군사 산업 단지 위임 회의에서 GPS와 GLONASS의 효율성을 평준화하고 2020 년까지 경쟁 지표에 도달하기위한 과제를 설정했다. Rogozin에 따르면, 이것은 새로운 장치의 출시 덕분에 이루어질 수 있습니다.
러시아 연방 대통령령에 따라 GLONASS 시스템의 내비게이션 신호에 대한 액세스는 러시아와 외국 소비자 모두에게 무료이며 제한없이 제공됩니다.
1996 년 이래 러시아 연방 정부의 제안에 따라 GLONASS는 미국 GPS와 함께 국제 해사기구와 국제 민간 항공기구 (International Civil Aviation Organization)에서 사용되었습니다.
위성 항법의 현대적인 수단은 이미 사회 경제적 영역의 다양한 분야에서 널리 사용되고 있으며 육상, 항공, 해상, 하천 및 우주선의 항해, 모든 유형의 교통 관리, 귀중하고 위험한 물건의 모니터링, 영해에서의 어업 모니터링을 허용합니다. , 수색 및 구조 작업, 환경 모니터링; 계측 및 석유 및 가스 파이프 라인, 전력선 건설시 센티미터 정확도의 지리적 대상물 위치 결정. 통신 시스템, 통신 및 전력 산업의 동기화; 근본적인 지구 물리학 적 문제를 푸는 것; 개인 소비자의 개인 항법.
위성 네비게이션은 이미 농업에서 사용되고 있으며, 콤비네이션이나 광업에서 토지를 자동으로 처리하는 데 사용됩니다. 위성 항법 기술의 응용 범위는 지속적으로 확대되고 있습니다.
자료는 RIA News 및 공개 자료의 정보를 기반으로합니다.
태양 플레어 중.
지자기 장애 발생시.
GNSS가 무엇인지 설명하십시오.
내비게이션 개발에 대해 알려주십시오 : "나침반에서 위성 항법 시스템 (SNA)에 이르기까지."
위성 항법 (SN)의 일반적인 원리를 설명하십시오.
현재의 SNA-GPS 및 광택, 그들의 구성 요소 (우주 및 지상 세그먼트) 및 응용 프로그램.
어느 SNS가 출시 준비 중이거나 진행 중인지 알려줍니다 (갈릴레오, 나침반).
SNS 실패를 설명하십시오 :
위치 정확도의 저하에 영향을 미치는 요인에 대해 설명하십시오.
GNSS.
위성 항법 : 개념, 시스템, 액션.
지구 항법 위성 시스템 (GLONASS) - 소련과 러시아요구에 의해 개발 된. 2 개의 현재 작동하는 세계 위성 항법 시스템 중 하나. 시스템의 기본은 표면 위로 움직이는 24 개의 위성이어야한다. 궤도면의 경사가 64.8 °이고 고도가 19,100km 인 3 개의 궤도면에서 측정 원리는 미국 내비게이션 시스템과 유사합니다.. 현재 GLONASS 프로젝트의 개발은 (Roscosmos)와 OJSC "러시아어"
와  인류가 얼마나 존재 하는가, 육지와 해, 숲 또는 도시에서의 위치를 결정하는 방법과 양. 지금까지 별이나 나침반의 고대 여행자와 항해자처럼 항해 할 필요가 없습니다. 전파 발견 시대는 우주의 정복 가능성을 발견 한 상태에서 지구상의 물체의 좌표를 결정하는 데 큰 발전을 이루었습니다. 인공 지구 위성은 무선 항법을위한 기준 스테이션이되었으며 오늘날 위성 항법 시스템은 군대 또는 선원뿐만 아니라 항해가 필요한 일반인, 개인 및 회사에서도 이용 가능하게되었다.
인류가 얼마나 존재 하는가, 육지와 해, 숲 또는 도시에서의 위치를 결정하는 방법과 양. 지금까지 별이나 나침반의 고대 여행자와 항해자처럼 항해 할 필요가 없습니다. 전파 발견 시대는 우주의 정복 가능성을 발견 한 상태에서 지구상의 물체의 좌표를 결정하는 데 큰 발전을 이루었습니다. 인공 지구 위성은 무선 항법을위한 기준 스테이션이되었으며 오늘날 위성 항법 시스템은 군대 또는 선원뿐만 아니라 항해가 필요한 일반인, 개인 및 회사에서도 이용 가능하게되었다.
컨셉 : 위성 네비게이션 시스템
- 지상, 물 및 공기 물체의 위치 (지리적 좌표 및 고도)와 동작 매개 변수 (속도 및 동작 방향 등)를 결정하도록 설계된 복합 및 지상 장비 조합으로 구성된 복잡한 전자 기술 시스템입니다.
시스템 :
위성 항법 시스템의 주요 요소 :
궤도 그룹
특별 라디오 신호를 방출하는 여러 위성 (2 ~ 30 개)으로 구성됩니다. 지상 제어 및 감시 시스템은 위성의 현재 위치를 측정하고 수신 된 정보를 궤도상의 정보를 조정하기 위해 전송하는 장치를 포함한다.
수신 클라이언트 장비
( "위성 내비게이터"), 좌표를 결정하는 데 사용;
선택 사항
:
사용자에게 보정 정보를 전송하는 정보 무선 시스템으로 좌표 결정의 정확성을 크게 향상시킵니다.
액션 : 위성 네비게이션 시스템의 작동 원리는 시설에서 안테나로부터의 거리 (측정 좌표를 얻어야 함)를 정확한 위치로 알려진 위성으로 측정하는 것에 기반합니다. 모든 위성의 위치 테이블은 연감 (almanac)이라고하며, 위성 수신기는 반드시 측정을 시작해야합니다. 일반적으로 수신기는 마지막 종료 이후 메모리에 일정표를 보관하고 오래된 날짜가 아니라면 즉시이를 사용합니다. 각 위성은 신호에 전체 연감 (almanac)을 전송합니다.
따라서, 연대표에 기초한 종래의 기하학적 구조를 사용하여, 시스템의 여러 위성에 대한 거리를 알면, 우주에서의 물체의 위치를 계산할 수있다. 위성으로부터 수신기 안테나까지의 거리를 측정하는 방법은 전파의 전파 속도를 측정하는 것을 기반으로합니다. 무선 신호의 전파 시간을 측정 할 수있는 가능성을 실현하기 위해 네비게이션 시스템의 각 위성은 시스템 시간과 정확하게 동기화 된 원자 시계를 사용하여 신호의 일부로 정확한 시간 신호를 방출합니다.
위성 수신기가 작동 중일 때 시계는 시스템 시간과 동기화되고 신호를 추가 수신하면 신호 자체에 포함 된 방사 시간과 신호 수신 시간 사이에 지연이 계산됩니다. 이 정보를 사용하여 내비게이션 수신기는 안테나의 좌표를 계산합니다. 대부분의 네비게이션 수신기는 속도 정보를 얻기 위해 도플러 효과를 사용합니다. 또한이 데이터를 일정 기간 축적하고 처리하면 속도 (현재, 최대, 평균), 이동 거리 등과 같은 모션 매개 변수를 계산할 수 있습니다. 실제로 시스템은 훨씬 더 복잡합니다.
다음은이를 해결하기위한 특별한 기술이 필요한 몇 가지 문제입니다.
대부분의 탐색 수신기에 원자 시계가 없습니다. 이러한 단점은 일반적으로 적어도 3 개의 (알려진 높이에서 2 차원 탐색) 또는 4 개의 (3 차원 탐색) 위성으로부터 정보를 얻는 요구 사항에 의해 제거됩니다. (하나 이상의 위성으로부터의 신호가있는 경우, 현재 시간을 정확하게 알 수 있습니다). 인공위성의 궤도에 영향을 미치는 지구의 중력장의 이질성. 전파의 전파 속도와 방향이 일정한 한계 내에서 변할 수있는 대기의 이질성. 도시에서 특히 눈에 띄는 지상 물체로부터의 신호 반사; 인공위성에 고전력 송신기를 배치 할 수 없기 때문에 신호를 수신하는 것은 실외에서 직접 시야에서만 가능합니다.
역사 및 개발 전망.
위성 항법 시스템의 개발 역사는 40 년이 넘습니다. 가장 흔한 것으로 간주되는 국내 인공위성 라디오 네비게이션 시스템 (SRNS) 개발의 시작은 1957 년 10 월 4 일 인류 역사상 최초의 인공 지구 위성 (AES) 소련에서 시작되었다. 1946 년 레닌 그라드 사이언 티픽 리서치 라디오 - 기술 연구소 (Leningrad Scientific Research Radio-Technical Institute)의 전문가 연설을 통해 과학 기술위원회 (Scientific and Technical Council)에서 여러 부서의 필요를 충족시키는 시스템을 만들 필요성에 대한 언급이 처음으로 제기되었습니다. 70 년대 중반에는 위성 항법 시스템 "Cicada"가 소련과 미국의 60 년대에 만들어졌습니다. Transit 시스템은 이후 많은 변화와 기술 개선을 거쳤습니다. 이 시스템은 국방부의 명령에 따라 개발되었으며 지상 이동 물체의 운영 전역 항법에 특화되어 있었으나 1976 년 12 월 CPSU 중앙위원회와 소련 내각 이사회 (Unified Space Navigation System)의 배치에 관한 결의안이 채택되었다. 기존 위성 항법 시스템, 소비자는 결과의 정확성과 좌표를 결정하는 데 필요한 시간에 만족하지 못했습니다. 차세대 시스템의 생성이 필요했습니다. 그 결과, 지난 세기 80 년대 초의 소련에서는 위성 항법 시스템이 발명되었습니다. 태어난 위성 항법 시스템은 미국에서는 GPS, 소련에서는 GLONASS라고 불렀다. 결과적으로, 최초의 미국 위성은 1978 년 2 월에, 그리고 첫 번째 소련 위성은 1982 년 10 월 12 일에 발사되었다. 1993 년 9 월 24 일 GLONASS가 공식적으로 위촉되었습니다. 1995 년 그녀의 위성 별자리는 24 대였습니다. 그 결과 자금 부족으로 인해 일하는 위성의 수가 줄어 들었습니다. 2001 년 8 월 연방 정부의 목표 프로그램 인 "Global Navigation System"이 채택되었는데, 러시아의 영토 전체에 대한 계획이 수립 되었는가? 2008 년 초 시스템은 2010 년 초까지 세계적인 규모에 도달했을 것입니다. 이 작업을 수행하기 위해 2007 년, 2008 년 및 2009 년에 6 회 발사체를 발사하고 18 개의 위성을 궤도에 진입시킬 계획이었습니다. 따라서 2009 년 말까지이 그룹은 다시 24 대의 차량으로 구성되어야합니다. 동시에 시스템 사용자의 위치를 결정하는 정확도는 GPS와 마찬가지로 1-5 미터에 도달합니다. 오늘날 기계 공학의 중앙 연구소 (Central Research Institute)에 따르면, GLONASS 시스템의 궤도 그룹은 19 개의 우주선을 가지고있다. 그것들 중 14 가지는 의도 된 목적을 위해 사용되었다. 3 - 시스템에 진입하는 단계에서 (09/25/2008에 발사 됨), 1 - 일시적으로 유지 보수로 가져 왔고, 1 - 시스템에서 철수하는 단계에서. 예측에 따르면 2008 년 말까지 3 개 이상의 오래된 장치가 시스템에서 제거됩니다.
우주 항법 시스템의 장기 개발 프로그램은 다음과 같은 통합 단계에서 구현되고있다.
1 단계
(2003 년까지). 최소한 q에서 GLONASS CNS 유지 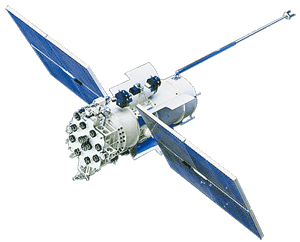 우주선 Glonass 출시 (그림), 지상 제어 단지의 정보 교환 회로의 현대화, GLONASS와 GPS의 두 시스템에서 신호로 작동하는 장비로 소비자의 장비가 확장되었습니다. 인공위성 "Glonass-M"의 개발과 창조.
우주선 Glonass 출시 (그림), 지상 제어 단지의 정보 교환 회로의 현대화, GLONASS와 GPS의 두 시스템에서 신호로 작동하는 장비로 소비자의 장비가 확장되었습니다. 인공위성 "Glonass-M"의 개발과 창조.
어. 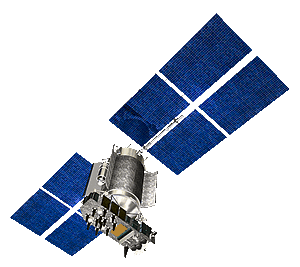 2 번 탭
(2005 년까지) 1415 kg의 질량을 가진 Glonass-M 위성 (그림.)에 기초하여 최대 18 개 유닛의 작업 궤도 별자리 배치. 그리고 7 년의 활동적인 삶은이 시리즈의 이전 위성보다 훨씬 큽니다. 네비게이션 신호의 새로운 주파수 범위로 전환합니다. 위성 간 측정을 사용하여 천체력 시간 지원 기술 테스트. GLONASS 및 GPS SPS에서 신호를 처리하는 소비자의 수와 명명법의 확장. 작은 질량의 우주선 인 Glonass-K의 개발과 창조.
2 번 탭
(2005 년까지) 1415 kg의 질량을 가진 Glonass-M 위성 (그림.)에 기초하여 최대 18 개 유닛의 작업 궤도 별자리 배치. 그리고 7 년의 활동적인 삶은이 시리즈의 이전 위성보다 훨씬 큽니다. 네비게이션 신호의 새로운 주파수 범위로 전환합니다. 위성 간 측정을 사용하여 천체력 시간 지원 기술 테스트. GLONASS 및 GPS SPS에서 신호를 처리하는 소비자의 수와 명명법의 확장. 작은 질량의 우주선 인 Glonass-K의 개발과 창조.
3 단계
(2010 년까지). 현저하게 더 긴 10 년, 더 작은 질량, 약 700kg의 현저하게 더 긴 활성 수명을 가진 더 작고, 더 진보 된, 가압되지 않은 Glonass-K 인공위성 (Fig No.)만으로 표준 궤도 별자리 배치 "Glonass-M"보다 적습니다. 자율적 인 천체력 시간 지원 문제, 우주선의 운영 제어 및 모니터링, 무결성 보장을위한 위성 간 라디오 링크 사용 확대 GLONASS CLS 및 기능 추가 기능을위한 지상 관측 네트워크 모니터링 네트워크 구축 GLONASS, GPS, Galileo 신호로 작동하는 NAP 소비자 공원 장비.
이 시리즈의 항법 위성은 Soyuz-2 발사체에 의해 Fregat 상단 단계가있는 단일 발사체 또는 한 패키지에 6 대의 차량 - Breeze-M 상단 단계가있는 Proton 발사체에 의해 궤도에 진입합니다. 또한, 인도 궤도 진입은 인도 GSLV 항공사의 도움으로 가능합니다. 그래서 2004 년 모스크바에서 인도는 2006 년에서 2008 년까지 두 개의 항법 위성을 발사하기로 합의했다. Glonass-K 장치는 전문가에 따르면 개방 공간에서 작동해야하는 장비 및 요소 기반에 대한 요구가 증가하는보다 진보적 인 비 밀폐 플랫폼을 기반으로 만들어졌습니다. 아마도 사용 된 요소 중 일부는 외국어 일 것입니다. 그러나 네비게이션 시스템은 러시아어이므로 주로 장치의 요소에서 작동해야합니다. 현재까지, GLONASS 네비게이션 모듈을 휴대 전화에 설치하는 기술적 가능성이 개발되고 있습니다. GPS 네비게이터가있는 전화기는 이미 존재하며 러시아를 비롯하여 전 세계에서 널리 사용되고 있습니다. 네비게이션 장비 시장에는 이미 GPS / GLONASS 수신기가 많이 있습니다.이 수신기는 러시아 전용으로 제작되었으며 매우 다른 용도로 사용됩니다.
전문가들은 현재의 GLONASS 복구 및 개발 기간의 주요 과제는 다음과 같다고 생각합니다.
Glonass 우주선의 지속적인 작동에 대한 신뢰도를 높이고 기간을 20 년으로 늘리십시오.
폐쇄 된 지형에서 높은 정밀도의 위치를 보장하기 위해 48 개의 위성으로 최대 6 개 비행기의 궤도 그룹을 만들 수 있습니다 (이 프로그램은 이미 미국에서 채택했습니다).
전자 보안 및 시스템 독립성 제공
Cospas 구조 시스템, 핵폭발의 위치, 적재물 위치를 대신하는 위성 간 통신을 "승객"시스템에서 제외 할 수있는 가능성을 고려하십시오.
그리고 가장 중요한 것은 - GLONASS에 대한 모든 진실을보고 할 수있는 전문가의 작업에 집중하는 것입니다. GLONASS는 모든 우주 프로그램의 우선 순위입니다. 그게 없으면 몇 년 안에 러시아는 무방비 상태로 남을 것이기 때문입니다. GLONASS가 없다면 미국의 미사일 방위와 다른 잠재적 인 위협에 대한 비대칭 대응은 원칙적으로 불가능하다. 따라서 대통령은 가능한 한 빨리 GLONASS의 부흥을 강력하게 요구하고 있습니다.
수술의 원리.
GLONASS 인공위성은 L1 대역 (1.6 GHz)의 표준 정확도 항법 신호 (ST)와 L1 및 L2 대역 (1.2 GHz)의 고정밀 항법 신호 (BT)의 두 가지 유형의 항법 신호를 지속적으로 방출합니다. CT 신호에 의해 제공되는 정보는 모든 소비자가 영구적이고 전 세계적으로 이용할 수 있으며, GLONASS 수신기를 사용하면 다음을 결정할 수 있습니다.
* 50-70m의 정확도를 가진 수평 좌표 (99.7 %의 확률);
* 정확도 70m의 수직 좌표 (확률 99.7 %);
* 정확도 15cm / s의 속도 벡터 구성 요소 (확률 99.7 %)
정확도 0.7 μs (99.7 % 확률)의 정확한 시간.
이러한 정밀도는 차동 항법 및 / 또는 추가 특수 측정 방법을 사용하여 크게 향상시킬 수 있습니다.
BT 신호는 주로 러시아 국방부 소비자를 대상으로하며 허가받지 않은 사용은 권장하지 않습니다. 민간 소비자에게 VT 신호를 제공하는 문제는 고려 중입니다.
공간 좌표와 정확한 시간을 결정하기 위해서는 적어도 4 개의 GLONASS 인공위성으로부터 내비게이션 신호를 수신하고 처리해야합니다. 내비게이션 무선 신호를 수신 할 때 GLONASS 수신기는 잘 알려진 무선 엔지니어링 방법을 사용하여 보이는 위성까지의 거리를 측정하고 속도를 측정합니다.
수신기에서의 측정과 동시에, 각 네비게이션 무선 신호에 포함 된 타임 스탬프 및 디지털 정보의 자동 처리가 수행된다. 디지털 정보는 단일 시스템 시간 스케일 및 지구 중심의 데카르트 좌표계에 비례하여 공간 및 시간 (천문력)에서 주어진 위성의 위치를 설명합니다. 또한, 디지털 정보는 시스템의 다른 위성들의 위치 (궤도 정보)를 궤도의 케플 른 (Keplerian) 요소의 형태로 설명하고 다른 매개 변수를 포함합니다. 측정 결과 및 수신 된 디지털 정보는 좌표 및 동작 파라미터를 결정하는 네비게이션 태스크를 해결하기위한 초기 데이터이다. 탐색 문제는 수신기의 컴퓨팅 장치에서 자동으로 해결되며 잘 알려진 최소 자승법이 사용됩니다. 솔루션의 결과로 소비자 위치의 세 좌표가 결정되고 운동 속도와 소비자의 시간 규모가 고정밀 UTC (Universal Coordinated Time) 스케일에 연결됩니다.
GLONASS 오늘.
현재 운영중인 우주선 (SC)은 11 개의 GLONASS-M 인공위성 (2003 년, 2005 년 2 회, 2006 년 3 회)과 7 년의 유효 기간 동안의 보증 기간을두고있다. 이 인공위성은 이전 세대의 장치와 달리 민간 소비자 용으로 이미 두 가지 신호를 방출하므로 위치 정확도를 크게 향상시킬 수 있습니다.
러시아 연방 대통령의 지시에 따라 2007 년에 최소한 18 개의 인공위성을 배치해야한다. 연방 정부의 목표 프로그램 인 글로벌 네비게이션 시스템 (Global Navigation System)에 따라 24 개의 위성을 모두 그룹화해야 2010 년에 배치되어야한다.
궤도 별자리에있는 GLONASS-M 인공위성은 적어도 2015 년까지 될 것입니다. 향상된 특성 (보증 기간을 10 년으로 연장하고 민간 소비자를위한 세 번째 L- 밴드 주파수)을 갖춘 차세대 "GLONASS-K"의 압력을받지 않은 위성의 비행 시험은 2009 년에 시작되어야합니다. 이 인공위성은 전임자보다 두 배 가벼울 것입니다 (약 700kg 대 Glonass-M의 1415kg)
앞으로 24 개의 인공위성의 궤도 별 배치가 완료된 후 소유 즈 항공사의 GLONASS-K 위성 2 개를 1 년에 1 회 그룹 발사해야 운영비가 크게 절감 될 것입니다.
2006 년 11 월 29 일, 세르게이 이바노프 (Sergei Ivanov) 국방 장관은 RIRT 방문 당시 GLONASS 시스템이 조만간 민간용으로 제공 될 것이라고 발표했다.
2007 년 5 월 18 일 블라디미르 푸틴 러시아 대통령은 러시아 GLONASS 내비게이션 시스템에 대한 접근이 러시아와 외국 소비자 모두에게 무료로 제공 될 것이라는 법령에 서명했다.
GLONASS 인공위성은 Plesetsk 우주 기지에서 발사 될 것이다.
모스크바, 4 월 9 일 - RIA 뉴스. 미래의 GLONASS 항법 위성의 발사는 Baikonur가 아니라 Soyuz-2 발사체의 Plesetsk 우주선에서 수행 될 것이라고 러시아 우주국 부국장 Alexander Kvasnikov는 말했다. "그것은 바이 코 누르 (Baikonur)에서 플레 세츠 (Plesetsk) 우주선에 이르기까지 러시아의 글로벌 네비게이션 시스템 인 GLONASS의 우주선 발사를 점차적으로 개시 할 계획이다. 이 발사는 현대화 된 소유 즈 -2 발사 차량에서 수행 될 계획이다 "라고 월요일에 Kvasnikov는 위성 항법에 관한 국제 포럼에서 연설했다.
그에 따르면 바이 코 누르에서 플레 세츠 크 (Plesetsk) 로의 발사가 자체 우주선을 궤도에 진입시키는 측면에서 러시아의 독립을 보장 할 것이다.
우주 부대 지휘관이 지적했듯이 GLONASS 위성 항법 장치를 군대에 적용하는 범위는 개별 군인에게 자신의 좌표 정보를 제공하여 전체 군대에 내비게이션 정보를 제공하는 것까지 확장됩니다.
"GLONASS 인공위성의 발사와 함께 소형 장치가 발사체에 설치되어 로켓 비행 중 고정밀 연속 궤도 측정을 제공합니다. 이전에는 지상 기반 궤도 측정 지점에 의한 로켓 비행 제어를 기반으로 많은 사람들과 자금의 참여가 요구되는 방법이 필요했습니다. "라고 Kvasnikov는 말했습니다.
그에게 따르면, 현재, 러시아 연방 우주 비행대에서 GLONASS 네비게이션 시스템의 지상 및 휴대용 장비에 대한 시험이 진행 중이다.
"그 사용으로 모든 기상 조건에서 GLONASS 수신기를 사용할 수있게되어 매우 거칠고 언덕이 많은 지형에서 좌표와 시간에 대한 정확한 참조를 제공 할 수 있습니다.
GLONASS와 GPS의 비교.

주요 위성 항법 시스템 (NAVSTAR 및 GLONASS)의 몇 가지 기능을 고려하십시오. 두 시스템은 군사용 및 민간용이라는 두 가지 목적을 가지고 있으므로 민간용 좌표 (~ 100m)와 다른 높은 정확도 (~ 10 -15 m 이상) 군사용으로 사용됩니다. NAVSTAR 인공위성은 대략 20,180 km의 고도에있는 6 개의 비행기에 위치하고 있습니다. GLONASS 인공위성 ( "허리케인"코드)은 약 19,100km 고도의 세 비행기에 위치하고 있습니다. NAVSTAR 별자리는 1994 년 4 월에 완전히 설치되어 유지되었으며, GLONASS 별자리는 1995 년 12 월에 완전히 배치되었지만 그 후로는 상당히 저하되었다. 현재로서는 적극적으로 회복하고 있습니다. 두 시스템 모두 소위 말하는 신호를 사용합니다. 의사 잡음 시퀀스 (Pseudo-Noise Sequence)는 송신기의 낮은 송신 전력에서 높은 잡음 내성과 신뢰성을 제공합니다. 목적에 따라 L1 (표준 정확도)과 L2 (높은 정확도)라는 두 가지 기본 주파수가 각 시스템에 있습니다. NAVSTAR L1 = 1575.42 MHz 및 L2 = 1227.6 MHz의 경우. GLONASS에서는 신호의 주파수 분리가 사용됩니다. 즉, 각 위성이 자체 주파수에서 작동하므로 L1은 1602.56 ~ 1615.5 MHz이고 L2는 1246.43 ~ 1256.53입니다. L1의 신호는 모든 사용자가 사용할 수 있으며 L2의 신호는 군대에서만 사용할 수 있습니다 (즉, 특수 비밀 키 없이는 해독 할 수 없습니다). 시스템의 각 위성은 기본 정보 외에도 수신 장비의 지속적인 작동에 필요한 보조 정보를 전송합니다. 이 범주에는 몇 분 동안 순차적으로 전송되는 전체 위성 별자리의 전체 연감이 포함됩니다. 따라서 수신 장치의 시작은 실제 연감 (약 1 분)이 포함 된 경우 매우 빠를 수 있습니다.이를 "웜 스타트 (warm start)"라고하지만 수신자가 전체 연감을 받도록 강제하는 경우 최대 15 분이 걸릴 수 있습니다. n "콜드 스타트". "콜드 스타트"의 필요성은 대개 수신기가 처음으로 켜지거나 오랫동안 사용되지 않은 경우에 발생합니다.차동 측정
위성 수신기의 분리 된 모델은 소위 생산할 수 있습니다. 큰 정확도 (센티미터)로 두 점 사이의 거리를 "차동 측정"합니다. 이렇게하려면 짧은 시간 간격으로 두 지점에서 네비게이터의 위치를 측정하십시오. 동시에, 이러한 각 측정은 지상 보정 시스템없이 10-15 미터 정도의 정확도를 가지지 만 이러한 시스템에서는 10-50 cm의 정확도를 가지지 만 측정 거리는 측정에 간섭하는 요소 (위성 궤도 오차, 대기 이질성 등) 때문에 훨씬 더 작은 오차를 갖습니다. d.)는이 경우 서로 공제가 가능합니다. 또한 수신기의 좌표를 10 센티미터로 측정하는 정확도를 높이기 위해 명확한 정보 (좌표에 대한 차등 보정)를 전송하는 여러 시스템이 있습니다. 차동 보정은 정지 된 물체 (위성, 지상 기지국)를 기반으로하며 일반적으로 지불됩니다 (신호는 "서비스 가입"을 지불 한 후 특정 수신자 만 해독 할 수 있습니다). 현재 (2006)에는 고정 정밀도 (최대 30cm)를 제공하지만 간헐적으로 또는 불안정하게 작동하는 2 개의 정지 위성을 기반으로하는 무료 유럽 시스템 EGNOS (European Geostationary Navigation Overlay Services)가 있습니다. 북미에서는 WAAS 시스템이 해당됩니다.
GPS 시스템이 부족합니다.
모든 장점에도 불구하고 GPS 시스템에는 단점이 있습니다. 예를 들어, GPS 수신기는 미국 보안상의 이유로 언제든지 꺼질 수 있습니다. 또한 GPS 기술의 도입은 모든 국가에서 상업적으로 이용 가능하지 않은 최대 100m 규모의 상세한 전자지도를 사용할 수 있음을 의미합니다. 좌표를 계산할 때 위성 시스템이 오류를 허용한다는 사실은 말할 것도 없습니다. 이러한 오류의 특성은 다릅니다. 특히 GPS 시스템의 내비게이션 계산의 정확성에 영향을 미치는 주요 오류의 원인은 다음과 같습니다.
선택적 액세스 모드 (S / A)로 인한 오류. 이 모드를 사용하여 미 국방부는 의도적으로 민간인의 위치 정확도를 줄입니다. S / A 모드에서는 항법 측정을 거칠게하기 위해 신호 온보드 GPS 위성에 삽입되는 인공 오류가 생성됩니다. 이러한 오류는 인공위성 궤도상의 부정확 한 데이터 및 부가적인 의사 - 무작위 신호의 도입으로 인한 시간 판독의 왜곡이다. 이 계수의 영향으로 인한 표준 편차의 크기는 약 30m입니다.
전리층의 전파 전파와 관련된 오류. 신호가 대기의 상위 레이어를 통과 할 때 신호 전파가 지연되면 오후 오후 20-30m, 야간 3-6m의 오차가 발생합니다. GPS 위성에서 전송 된 항법 메시지에는 전리층 모델의 매개 변수가 포함되어 있음에도 불구하고 실제 지연에 대한 보상은 기껏해야 50 %입니다.
대류권에서 전파의 전파와 관련된 오류. 전파가 대기의 하층을 통과 할 때 발생합니다. С / А-code로 신호를 사용할 때이 유형의 오류 값은 30m를 초과하지 않아야한다.
천체력 오류. 에러는 GPS 위성의 실제 위치와 위성으로부터 전송 된 네비게이션 신호의 데이터로부터 결정되는 계산 된 위치 사이의 불일치로 인한 것이다. 오류 값은 일반적으로 3m이 아닙니다.
위성 시간 스케일의 출발 시간은 다른 위성의 시간 스케일 사이의 불일치로 인해 발생합니다. 지상 추적 국을 사용하거나 차동 포지셔닝 모드에서 시간 눈금 표류를 보정하여 제거 할 수 있습니다.
위성까지의 거리를 결정할 때의 오류는 통계적 지표입니다. 특정 위성 및 지정된 시간 간격에 대해 계산됩니다. 오류는 다른 유형의 오류와 상관 관계가 없습니다. 그 값은 보통 10m를 초과하지 않습니다.
영장 시스템의 단점 :
현재 GLONASS는 이동 위성 통신과 전파 천문의 작동을 방해하므로 주파수 범위를 오른쪽으로 옮길 필요가 있습니다
위성 천문력을 변경할 때 표준 모드의 좌표 오류는 25-30m 증가하고 차동 모드 - 10m를 초과합니다.
실행중인 두 번째 수정은 GLONASS 신호의 연속성을 방해합니다. 이는 민간 항공기에서는 수용 할 수없는 소비자의 위치 좌표를 결정하는데 큰 오류를 일으킨다.
GLONASS 및 GPS 시스템의 데이터를 사용 된 좌표계 간의 공식적으로 공표 된 매트릭스가 없어서 다시 계산하기가 어렵습니다.
유럽 연합 (EU)네비게이션 갈릴레오. 중국은 자체 개발도하고있다.내비게이션 시스템 베이 도우 (Beidou)는 2008 년 말까지 중국과 주변 아시아 국가의 대부분을 포괄 할 것이다.
갈릴레오 - 위성 시스템네비게이션유럽 연합이 개발 중이다. 단일 컨셉은 1999 년에 채택되었고 원래의 개발 계획은 2003 년에 승인되었고 2008 년에 시스템의 출시를 제공했습니다.
그러나 그것은 EU 국가들의 정부와 갈릴레오에 투자하려는 사기업의 불일치로 인해 좌절했다. 민간 기업 컨소시엄은 EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat 및 Deutsche Telekom 및 German Aerospace Center를 포함한 독일 그룹으로 구성되었습니다.
2007 년 5 월, 컨소시엄은 프로젝트에서 물러 났고, 유럽위원회 (European Commission)는 갈릴레오 (Galileo)의 리더십을 이어 받았다. 현재 30 개의 계획 위성 중 하나만이 궤도에 있으며, 두 번째 위성은 2008 년 4 월 27 일에 궤도에 진입 할 계획입니다.
EU는이 프로젝트에 약 10 억 유로를 쓰고있다.
미국의 GPS와 러시아의 글로 나스와 달리, 갈릴레오 시스템은 정부 기관이나 군대에 의해 통제되지 않습니다. 개발은 ESA에 의해 수행됩니다. 시스템을 구축하기위한 총 비용은 38 억 유로로 추산됩니다. 갈릴레오 시스템의 첫 위성은 2005 년 11 월 30 일 바이 코 누르 우주 센터로 인도되었다. 2005 년 12 월 28 일 8시 19 분에 GIOVE-A (Galileo In-Orbit Validation Element) 우주선이 고도 23,000km, 56 °의 경사로 계산 된 궤도에 진입했다. 장치의 질량은 전체적으로 700kg 크기 : 길이 - 1.2 m, 지름 - 1.1 m 활성 존재 기간은 12 년입니다. "ESA"유럽 우주국 (European Space Agency, 유럽 우주국)은 1975 년에 설립 된 국제기구로, 갈릴레오의 유럽인들을 위해 공간을 정복하려는 노력을 단합합니다.
전리층 무선 신호의 특성에 전리층의 영향
전리층을 통해 전파되는 전자기파는 다양한 방해를 경험합니다. 전파의 매개 변수 변화를 결정하는 전리층의 주요 특성은 전자 (적분) 전자 콘텐츠나는 (~ ) 또는 파생 상품 (시간과 공간에서)나는 ´ ~ (~ ), 나는 x (~ ) 및 나는 y (~ a) 전파 경로를 따라.
PES 변경 사항은 규칙적인 규칙과 불규칙한 규칙으로 나눌 수 있습니다. 적어도 자기 적으로 조용한 중위도 전리층에 대한 정기적 인 변화 (계절, 일일)는 PES 예측 정확도를 50-80 %까지 높여주는 모델에 의해 설명됩니다. 불규칙한 변화 (변이)는 다양한 자연의 전리층 불규칙성과 관련이 있으며, 그 스펙트럼은 강압 법칙입니다.
최근의 연구의 결과로, 자기 폭풍 동안 전리층의 교란이 적도와 극지방뿐만 아니라 중위도에서도 신호 저하와 GPS 시스템 오류에 영향을 미치는 것이 분명 해졌다. 그러나이 영향의 원인과 구체적인 기제에 대한 질문은 크게 열려있다.
미래 연구의 주된 임무는 위성 지구 시스템의 신호 및 고장의 저하를 동반 한 지구 - 지구 공간의 지 자기 교란 중에 전리층의 전체 전자 함량의 다차원 변동의 물리적 메커니즘을 연구하는 것이다. 이러한 연구는 전리층을 모니터링하는 독립적 인 실험적 수단 (디지털 ionosondes, 비 간섭 성 scatter radar, chirp ionosondes 등)의 최대 참여로 포괄적이어야한다.
GPS 정확도
각각의 완전한 데이터 세트는 전리층 모델을 포함하며, 이것은 수신기가 위성 위치 및 언제든지 전리층을 통과 할 때 신호의 위상 지연을 근사화하는 데 사용됩니다. 의사 랜덤 코드 (pseudo-random code)를 사용하여 위성까지의 거리를 측정하는 방법. 가짜 범위 - 의사 랜덤 코드로 측정 된 수신 안테나와 위성 간의 거리. 앞서 언급했듯이이 거리는 좌표를 계산하는 데 필요합니다. 의사 범위 결정 절차는 다음과 같이 설명 될 수 있습니다.
위성과 수신기의 시계가 서로 완전히 동기화된다고 상상해보십시오. PRN 코드가 위성에서 전송되면 수신기는 동일한 코드의 정확한 사본을 재생합니다. 얼마 후 위성에서 전송 한 코드가 수신자에게 수신됩니다. 전송 된 코드와 정확한 사본을 비교함으로써, 수신기는 코드가 수신기에 도달하는 데 필요한 시간을 계산할 수 있습니다. 빛의 속도로 여행 시간을 곱하면 위성과 수신기 사이의 거리가됩니다. 코드에 의한 거리 측정 불행히도 수신기와 위성 시계가 완전히 동기화되었다고 가정하는 것은 완전히 정확하지 않습니다. 범위를 계산하는이 방법은 위성 시계와 수신기의 매우 정확한 동기화를 요구합니다. GPS 위성은 매우 정확한 원자 시계이며, 가격이 $ 20,000에 도달 할 수있는 시계와 같은 수신기를 제공하는 것은 매우 비쌉니다.
클록 동기화 문제는 수신기 클록 오류를 탐색 방정식에서 추가로 알려지지 않은 것으로 간주함으로써 해결된다.
위성과 수신기 사이의 거리는 전체 전체 사이클 수와 수신기와 위성 사이의 부분주기에 캐리어 파장을 곱한 값의 합계입니다. 반송파 위상에 의해 결정되는 범위는 코드에 의해 얻어진 범위보다 훨씬 더 정확하다.
그러나 한 가지 문제가 있습니다. 반송파는 사인파이므로 모든 사이클이 동일하게 보입니다. 따라서 GPS 수신기는 한주기를 다른주기와 구별 할 수 없습니다. 다시 말해, 수신기가 켜지면 위성과 수신기 사이의 전체 전체 사이클 수를 결정할 수 없습니다. 총 사이클 수가 알려지지 않거나 모호한 상태를 유지하면서 사이클의 분수 부분 만 (최소 2mm의 정확도로) 결정할 수 있습니다.
다행히 수신기는 켜져있는 동안 상 변화를 모니터링 할 수 있습니다. 이것은 초기 불확실성이 시간이 지남에 따라 해결된다는 것을 의미합니다. 안테나와 위성 사이의 총 반송파 수 (파장)를 결정하는 것은 모호성 분해능 - 파장 수의 정수 값 검색입니다. 센티미터 정확도로 위치를 결정하는 데 사용되는 사후 처리 측정의 경우이 정수 값은 컴퓨터에서 처리 중에 결정됩니다. 센티미터 정확도로 위치를 결정하는 데 사용되는 실시간 측정의 경우이 정수 값은 초기화라고하는 프로세스 중에 결정됩니다.
루프 스킵 신호는 거리를 측정 할 때 반송파 위상의 정수 사이클 수로 점프합니다. 신호 손실은 신호와 위성 간의 장애로 인해 발생할 수 있습니다. 전파 간섭, 전리 방해 및 높은 수신기 동역학 - 모두 인과적인 신호 손실 일 수 있습니다. 유사하게, 수신기 미끄러짐으로 인해 사이클 미끄러짐이 발생할 수 있습니다. 루프 건너 뛰기는 길이에 관계없이 지속될 수 있습니다.
차동 보정으로 인한 정확도는 기지국의 좌표 정확도에 직접적으로 좌우되기 때문에 가능한 한 정확하게 기지국의 좌표를 알아야합니다. 실시간 및 사후 처리에서 차등 보정을 수행하는 두 가지 방법이 있습니다.
나는 SNA의 발전이 SNA 자체를 소유하고있는 나라와 잘 발전하는 데 도움이된다고 믿는다. 우리 행성 근처의 우주 공간에 대한 활발한 탐사가 계속됩니다. 라디오 전자 분야의 업적은 군대뿐만 아니라 민간인들의 목적에도 크게 도움이됩니다. 예를 들어, HF 덕분에 산악 관광객을 찾는 것이 훨씬 쉬워졌습니다. HH는 운전자의 길잡이 역할을하는 것입니다. 그러나 그것이 나쁜 방향으로 나아가는 것이 좋을 것입니다 ... 이미 사용 된 인공위성들과 그 파편들에 의해 지구 근처의 공간이 끊임없이 오염되고 있습니다. 우리는 거의 환경에 해를 끼치 지 않고 우리의 필요를 충족시켜야합니다 .... 조정 과학 및 정보 센터 (2002). - 매개 변수와 GLONASS 신호의 공식 기술 설명. 2009 년 12 월 14 일에 확인되었습니다.
러시아 우주 과학 연구소 우주기구 (2008). - 매개 변수와 GLONASS 신호의 공식 기술 설명. 2009 년 12 월 14 일에 확인되었습니다.
오늘날 세계에는 인공위성을 사용하는 여러 항법 시스템이 있습니다. 그러나 지구상의 거의 모든 장소에있는 진정한 글로벌 포지셔닝 서비스는 오직 러시아 GLONASS와 미국 GPS 두 가지에 의해서만 수행됩니다.
글로벌 GPS 포지셔닝 시스템
미국의 GPS 위치 확인 시스템은 기능면에서 러시아 GLONASS 시스템과 유사합니다. 주요 목적은 소비자의 좌표, 속도 벡터의 구성 요소 및 시스템 시간 척도에 대한 참조를 정확하게 결정하는 것입니다.
마찬가지로 국내에서는 GPS 시스템이 미국 국방성을 위해 개발되었으며 통제하에 있습니다. GLONASS 시스템과 마찬가지로 GPS는 공간 세그먼트, 지상 기반의 명령 측정 복합체 및 소비자 세그먼트로 구성됩니다.
갈릴레오 위성 항법 시스템
유럽 연합 (EU)과 유럽 우주국 (ESA)은 새로운 유럽 위성 항법 시스템 인 갈릴레오 (Galileo)를 가동 할 계획이다. 두 번째로 완벽하게 작동하는 GNSS 위성 시스템의 존재는 전세계 민간 소비자에게 상당한 이익을 가져다 줄 것입니다. Galileo 프로젝트가 성공적으로 시작되면 사용자가 이용할 수있는 작업 항법 위성의 수를 두 배 이상 늘릴 수 있습니다. 이러한 위성 수의 증가는 오프라인에서 작업 할 때뿐만 아니라 추적 된 위성 신호에 대한 반송파 위상의 모호성을 해결하기위한 GPS 장치의 기능 및 좌표 결정의 품질을 향상시킬 수 있습니다.
비교 특성
인도 위성 항법 시스템
인도 정부는 2006 년 5 월 9 일 인도의 인공위성 지역 내비게이션 시스템 (IRNSS)을 향후 6 ~ 7 년 동안 142 억 루피의 예산으로 배치하는 프로젝트를 승인했다. IRNSS 위성 별자리는 정지 궤도에있는 7 개의 위성으로 구성됩니다. 일곱 개의 위성 모두 인도 제어 국과의 지속적인 무선 가시성을 확보 할 것이다.
IRNSS 지상 구역에는 모니터링 스테이션, 스테이션, 예약, 온보드 시스템 모니터링 및 제어 스테이션이 있습니다. 국유 기업 ISRO는 인도 정부의 통제하에있는 IRNSS의 배치를 담당합니다. IRNSS 신호를 수신 할 내비게이션 수신기도 인도 회사에서 개발 및 생산할 예정입니다.
중국 항법 위성 시스템 나침반
세계에서 가장 빠르게 성장하는 중국은 자체 위성 항법 장치 인 컴퍼스 (Compass)를 건설하기 시작했다.
컴퍼스 위성 항법 시스템 공간 세그먼트는 지구 정지 궤도 (GSO)의 5 개의 위성과 평균 지구 궤도의 30 개의 위성으로 구성됩니다.
두 종류의 서비스가 제공됩니다. 일반적으로 신호가 전송되며,이 신호를 통해 10 m의 위치 결정 정확도, 0.2 m / s의 속도 및 50 ns의 정확도로 현재 시간을 결정할 수 있습니다.
제한된 수의 사용자가 더 정확하게 측정 할 수 있습니다.
중국은 컴퍼스가 다른 글로벌 네비게이션 시스템과 상호 작용할 수 있도록하기 위해 위성 항법 개발에서 다른 나라와 협력하기를 원합니다.
일본 Quasi-Zenith 네비게이션 시스템 (QZSS)
원래 일본어 QZSS는 2002 년에 일본과 주변 동남 아시아 지역에서 이동 통신, 방송 및 널리 사용되는 일련의 서비스를 갖춘 상용 시스템으로 설계되었습니다. QZSS를위한 위성의 첫 발사는 2008 년으로 예정되어있다. 2006 년 3 월 일본 정부는 최초의 인공위성이 상업용으로 사용되지는 않을 것이며 내비게이션 문제를 해결하기위한 결정을 내리기 위해 예산 기금으로 전적으로 출범 할 것이라고 발표했다. 첫 번째 위성의 테스트가 성공적으로 완료된 후에야 두 번째 단계가 시작되고 다음 위성은 이전에 계획된 서비스 범위를 완전히 보장합니다.
알렉세이 미카 일 로프, 부문장, FGU NIC "보호"
최근에 고정식 및 이동형 물체의 좌표를 결정하기 위해 글로벌 네비게이션 시스템의 사용이 증가하고있다.
최신 기술 및 개인 보안 기술의 발전과는 별도로 유지하지 마십시오. 보안 부서에서는 Almaz (Kodos-B LLC, Moscow), Argo-Strazh (Navigation Systems CJSC, Omsk), Arkan CJSC와 같은 탐색 모니터링 시스템이 오래 동안 사용되었습니다. BaltAvtoPoisk, St. Petersburg, Inflow GPS LLC (보안 국 Sokrat, Irkutsk).
이들 및 다른 많은 네비게이션 시스템은 GPS 수신기를 기반으로합니다 (Arkan 네비게이션 시스템은 물체의 위치를 결정하는 전통적인 무선 방향 찾기 방법을 사용할 수도 있습니다). 따라서이 시스템을 작업에 사용하는 직원은 GPS 작동 원리를 일반적으로 이해하고 명확하게 알 필요가 있습니다 그러한 시스템으로부터 요구 될 수있는 것, 그리고 그 시스템으로부터 기대되어서는 안되는 것.
네비게이션 시스템의 원리와 올바른 작동 원리를 이해하는 것이 성공적인 작업의 열쇠입니다.
신비한 GPS 약어 뒤에는 GPS (Global Positioning System)가 있습니다. 초기에이 프로젝트는 미군에 의해 세계 어느 곳에서나 실시간으로 좌표를 결정하는 수단으로 만들어졌으며 Navstar (타이밍 및 거리 측정 기능이있는 네비게이션 시스템)라고 불렸지 만 나중에 GPS 약어가 표시되었습니다.
GPS 작동 원리
삼각 측량의 원리는 모든 네비게이션 시스템의 작동을위한 기초입니다. 공간에서 알려진 3 점까지의 거리로부터 대상의 위치를 결정하는 단계.
간단히하기 위해 우리는 3 개의 고정 위성을 가지고 있다고 가정하고, 그 좌표를 높은 정확도로 알고 그 다음에 동 기적으로 방출되는 무선 신호의 전파 시간을 분석하여 3 차원 공간에서 좌표를 결정합니다. 물체로부터의 반사 된 무선 신호의 도착 시간을 분석하는 목표까지의 거리는 20 세기 초 레이더에서 결정되었지만 위성 항법 시스템에서도 같은 원칙이 사용되었습니다.
불행하게도, 이것은 전통적인 위성 위치 확인 시스템과 위성 위치 확인 시스템 사이의 유사성이 고갈되는 곳입니다. 실생활에서 위성은 약 2 만 km 고도의 궤도에서 빠른 속도로 움직입니다. 그러므로 지구상에서 우리는 인공위성으로부터의 동시 복사 시간과 그 좌표를 알지 못합니다.
이러한 모순을 해결하기 위해 개발자는 인공위성에 원자 시계를 설치하기로 결정했습니다. 그들은 매우 정확하고 비쌉니다. 비용은 약 10 만 달러이며, 각 위성에는 4 개의 위성이 있으므로 신뢰할 수있는 작동을 보장 할 수 있습니다. 따라서, 인공위성으로부터의 동기화 (무선 신호의 동시 방출 문제)가 해결되었다.
궤도에있는 위성의 위치를 결정하는 문제는 궤도에있는 지상 추적 국의 데이터를 제어 센터로 전송하여 해결됩니다.이 궤도의 정교한 요소가 계산됩니다. 이 매개 변수는 almanac에 입력되어 위성으로 전송되며, 차례로이 정보가 모든 작동 수신기로 전송됩니다. 위성의 궤도와 좌표를 제어하기 위해 4 개의 지상 추적 국이 있으며,
통신 시스템 및 제어 센터 (미국 국방부에 의해 통제 됨). 비행 고도 20km의 비행이 공중이없는 공간에서 일어난다는 사실을 고려하면 수학적 의존성에 의해 고정밀 도로 설명됩니다. 위의 모든 것을 고려하여 궤도에있는 위성의 위치를 결정하는 문제는 해결되었습니다.
지상 수신기 GPS 신호의 정확한 시간을 결정하는 문제를 해결해야합니다. 사실 GPS 신호의 수신기에서 우리의 시계는 공간에서 무선 신호 전파의 속도에 비해 엄청난 시간 측정 오류가 있습니다.
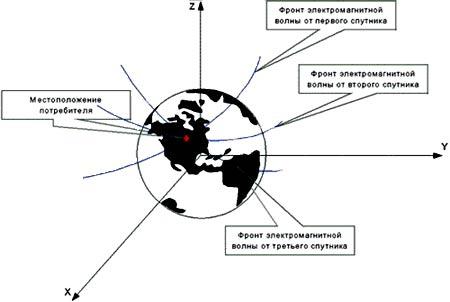
이 문제를 해결하기 위해 네 번째 위성 신호가 사용됩니다. 쌀을 고려해보십시오. 1.
하나의 위성에 대한 거리 A가 알려져 있다면, 수신기의 좌표는 결정될 수 없다 (이는 위성 주위에 기술 된 반경 A의 구의 임의의 지점에 위치 될 수있다). 두 번째 위성으로부터의 수신기의 거리 B가 알려지게하십시오. 이 경우, 좌표의 정의도 가능하지 않습니다 - 물체는 두 개의 구의 교차점 인 원 위에 있습니다 (그림 1의 파란색으로 표시). 세 번째 위성까지의 거리 C는 좌표의 불확실성을 두 지점으로 줄입니다 (그림 1에서 두 개의 굵은 파란색 점으로 표시). 이것은 좌표를 명확하게 결정할만큼 충분합니다. 실제로는 수신기 위치의 두 가지 가능한 지점 중 하나가 지구 표면 (또는 그 바로 근처)에 있으며, 두 번째는 지구 깊은 곳 또는 매우 위입니다. 표면에. 이론적으로는, 3 차원 항법에서는, 수신기로부터 3 개의 위성까지의 거리를 알면 충분하지만, 4 개 (또는 그 이상의) 위성으로부터의 신호를 수신 한 GPS 수신기의 시각을 보정 할 필요가있다 (도면의 원은 도시하지 않는다. 수신기는 대응하는 구의 교점을 찾고있다. 그런 점이 없다면 수신기의 프로세서는 한 점에서 모든 구의 교차점에 도달 할 때까지 연속 근사법을 사용하여 시계를 조정하기 시작합니다.
가장 중요한 사항 :
1. GPS의 좌표를 결정하려면 GPS가 적어도 네 개의 위성을 "보아야"합니다.
2. 수신기가 "보았던"위성이 많을수록 수신기의 좌표가 더 정확하게 결정됩니다.
GPS 시스템에서의 좌표 결정의 정확성
GPS의 명백한 이점은 지상에서의 모니터링 물체의 위치에 관계없이 좌표를 결정하는 높은 정확도입니다. 사실 세계적인 행동을 보장하기 위해서는 24 개의 인공위성이 끊임없이 궤도에 진입하며, 다른 쇠퇴 궤도를 돌며 세계 어디에서나 자신의 시야를 이론적으로 보장해야합니다. 이 문제를 해결하려면 궤도에 18 개의 위성이 있으면 충분하지만 24를 사용하여 위성 자체의 좌표를 결정하는 정확도를 높이기로 결정했습니다.
GPS 시스템에서 좌표를 결정하는 정확도는 물리적 매개 변수 (특히 수신 신호의 신호 대 잡음비, 아래 참조) 및 시스템 소유자 (미국)의 위치에 따라 많은 매개 변수에 따라 다릅니다. GPS 시스템에는 미국이 이라크 작전 사막 폭풍 동안 수행 한 부정확 한 민간 GPS 수신기를 위해 인위적으로 인공위성 신호에 도입 된 오류 인 선택적 액세스 모드 (SA 선택 가능)가 있습니다. 그림에서. 도 2는 선택 에러 모드에서의 에러를 결정하기위한 그래프를 도시한다.
좌표를 결정하는 정확도는 다음에 따라 달라집니다.
- 대기와 전리층의 상태에서 전자기장의 전파 속도는 진공 상태에서만 일정하기 때문에 전파 매체는 무선 신호의 전파 속도를 변화시킨다.
- 무선 신호의 "다중 경로"전파로부터.
- 하늘에있는 위성의 상대적 위치에서, 소위 "GDOP"(정확도를 감소시키는 기하학적 요소);
- 위성에서의 수학적 처리와 훨씬 더 많은 것에서.
전술 한 견지에서, GPS 수신기는 조밀 한 가문비 나무 숲에서, 그리고 물론, 자본 건물 또는 금속 차고 또는 격납고 내에 가까운 고층 건물 (소위 도시 우물) 근처에서 그 위치를 결정하는 것을 완전히 중단 할 수있다.
일부 사설 보안 업체는 GPS 수신기 + 휴대 전화를 사용하여 시민의 생명과 건강을 보호 할 가능성을 주장하지만 GPS를 사용하는 사람을 건물 내부, 계단 통, 운송 수단 (예 : 공격이 가장 자주 일어나는 곳)은 불가능합니다.
러시아에서 GPS 시스템의 좌표를 결정하는 실제 정확도는 10-25m입니다. 당연히이 정확도는 GPS 시스템에서 달성 할 수있는 최대 값이 아니며 정확도를 결정하는 차동 방법을 사용할 때 최대 10cm 이하가 될 수 있지만 이러한 시스템에 대해 이야기해야합니다 실제로 보안 부서에서 사용됩니다.
가장 중요한 사항 :
- GPS 네비게이션 시스템은 물체의 거리에 관계없이 중앙 감시 스테이션과 물체의 이동 시간으로부터 보호 된 좌표 (10-25m의 차수)를 결정하는 데있어 높은 정확도를 특징으로합니다.
- 좌표를 결정하는 정확성은 시스템 소유자 (미국)가 좌표를 결정할 수없는 완전한 수준까지 줄일 수 있습니다.
- GPS 수신기는 가까운 고층 빌딩 (소위 도시 우물) 근처, 고밀도의 가문비 나무 숲, 그리고 물론 자본 구조, 금속 차고 또는 격납고 안에 위치를 결정하는 것을 완전히 멈출 수 있습니다.
GPS 시스템 내성
보안 시스템에서의 사용 측면에서 GPS 시스템의 간섭 내성. 사실 위성 송신기의 출력은 L1 방출 범위의 경우 50 와트, L2 범위의 경우 8 와트로 제한되며 위성의 서스펜션 높이는 약 2 만 km입니다.
따라서 전자기파의 자속 밀도가 GPS 안테나에 미치는 영향을 이해하는 것은 어렵지 않습니다. 간단한 기하학적 계산은 송신기 안테나 다이어그램 너비가 2 마일이고 지구 표면의 위성 높이가 20,000km 인 경우
전자기 방사선의 흐름은 직경 700km의 원에 떨어집니다. 이러한 상황은 기가 헤르츠 방사 범위를 약간 줄여 주지만 (작동 주파수의 증가로 인해 매체의 소음 수준이 떨어짐) 동시에 장애물 주변에서 반올림되는 전자기파에 제한이 부과됩니다. 이 범위의 전자기파 전파는 거의 직관적입니다.
다음 지점은 종종 간과되기도합니다. GPS 수신기는 위치에서 좌표를 결정하고 좌표에 대한 정보는 PTO로 전송되어야합니다. 일반적으로이 목적을 위해 그들은 셀룰러 네트워크 또는 VHF 라디오 채널을 사용하여 모든 결과를 얻습니다.
셀룰러 네트워크는 쉽게 억압되며, 사용자는 셀룰러 회사에 의해 제공되는 서비스 품질에 전적으로 의존하며, 전체적으로 통지의 전달 속도, 통신의 신뢰성 및 클라이언트에 대한 의무의 장기에 대해 책임을지지 않습니다. 그러나 넓은 범위의 영역, 장비의 저렴한 가격 (그러나 객체 좌표의 정규 전송 가격이 아닌)은 이러한 솔루션의 매력적인 특징입니다.
VHF 라디오 채널은 셀룰러 네트워크에 비해 더 신뢰할 수있는 통신 채널이며 보호 대상과 PTO 간의 좌표 전송을위한 중개가 필요하지 않지만 훨씬 더 작은 서비스 지역과 구현하기 쉬운 항상 고유 한 주파수 리소스가 필요하다는 특징이 있습니다. 이 경우 보호 대상과 모니터링 스테이션 간의 트래픽 교환에 대해 비용을 지불 할 필요가 없습니다.
가장 중요한 사항 :
사용자는 GPS 모니터링 시스템 사용과 관련된 모든 함정을 명확하게 나타내야하고 불가항력을 고려해야하는 클라이언트에게 제공되는 서비스 계약을 유능하게 작성해야합니다.
GPS 또는 "GLONASS"
GPS가 미국에서 만든 글로벌 위치 시스템 인 경우 소련 - 러시아에서 만든 GLONASS (GLOBAL Navigation Satellite System)입니다. 축복받은 시대에 소련은 주로 군사 목적으로 사용 된 미국의 위치 확인 시스템과 동일한 특성을 가진 본격적인 위성 항법 시스템을 갖추고있었습니다.
그런 다음 페레스트로이카 (perestroika) 년 동안 GLONASS 인공위성의 대부분은 "떨어져"질서가 나 빠졌고 최악의 경우 궤도에있는 24 개의 위성 대신 7 개의 인공위성 만있었습니다. 2006 년에는 16 개의 위성이 궤도에 진입했으며, 그 중 9 개는 가까운 미래에 작동하거나 작동 할 예정입니다 (위성의 일부는 자원을 충분히 개발 한 단계이므로).
민간용으로 러시아에서 위성 네비게이션을 개발하기 시작한 시점에 네비게이션 리시버가 시장에 출시되어 의심 할 여지없이 정확하게 GPS와 GLONASS 신호를 수신 할 수있게되었습니다. 이는 수신시 잠재적으로 사용할 수있는 위성 수가 두 배이기 때문입니다. 이는 차례로 좌표의 위치와 정확도를 결정할 확률을 높여줍니다.
그러나 90 년대 후반의 GLONASS 시스템의 실제 사망으로 인해 현재 러시아의 자유 시장에는 GPS 수신기 만 존재합니다. 그러나 모든 것이 그렇게 나쁘지는 않습니다.
블라디미르 푸틴 (Vladimir Putin) 러시아 대통령은 GLONASS 네비게이션 시스템의 부흥을위한 우선 국가 프로그램으로 확인했으며, 2007 년에는 2010 년까지 궤도와 18 개의 위성으로 18 개의 위성을 운용 할 계획을 세우고있다. 주로 민사 및 부서별 신청서 *)에 대해 미국의 의지로부터
(군대 항법은 항상 무선 비콘, 기계 자이로 스코프, 링 레이저 자이로 스코프 등의 네비게이션 시스템과 같은 백업 시스템을 사용합니다. 지구 자기장의 변화 또는 저자가 알지 못하는 다른 원리를 등록하는 것이지만,이 모든 시스템은 가격이 비싸고 좌표를 결정할 때 정확도가 훨씬 낮습니다 구금 링 레이저 자이로 기반 시스템)과 시간 (누적 오차의 영향)에서 오브젝트의 좌표의 정확도 의존하는 경향 대.
위의 내용을 토대로 이러한 수단을 사용하는 항법 수준은 항공기 (항공기, 헬리콥터)의 수준에 따라 제한되며 위성 항법 시스템을 사용하면 미국에서 실현되는 더 많은 전투를 위해 개인 병사의 위치까지 엄청난 물체 비용으로 상대적으로 작은 자재 비용으로 위치를 추적 할 수 있습니다 (소위 "컴퓨터"부서의 창설, 미국에서는 이미 두 개의 부서가 만들어져있다).
가장 중요한 사항 :
- 현재 GPS 수신기가 국내 시장을 장악하고 있습니다.
- 사용자뿐만 아니라 네비게이션 시스템 개발자는 가까운 장래에 GPS 및 GLONASS 시스템을 공유 할 필요가 있습니다.
- 본격적인 궤도 별자리가 생기므로 GLONASS 시스템으로 전환해야합니다 (GPS 시스템과 동일한 GLONASS 수신기 또는 두 시스템의 수신기와 거의 동일한 기술 특성으로 인해 실제로이 작업을 수행 할 수는 있지만).
이 기사의 주제가 아니지만 러시아의 안정화 기금에 진정한 경쟁력을 갖춘 국내 내비게이션 시스템을 만들기 위해 돈을 쓰는 것은 유감스러운 일이 아닙니다.
결론 :
- 글로벌 네비게이션 시스템은 현대 엔지니어링의 최신 업적 중 하나이며 PSB의 실행에 적극적으로 사용되어야합니다.
- 글로벌 네비게이션 시스템은 모든 질병에 대한 만병 통치약이 아닙니다.
- 네비게이션 시스템의 특성을 고려하지 않고 경제적으로 정당하지 못하고 기술적으로 부당하게 사용하면 소비자의 관점에서이 방향에 대한 완전한 불신이 초래 될 수 있습니다.
이 기사는 잡지 "보호"편집자와 공동으로 작성되었습니다.
E. Povalyaev, S. Khutornoy
위성 항법 시스템 GLONASS 및 GPS.
우리는 Glonass (글로벌 네비게이션 위성 시스템) 및 GPS (위성 위치 확인 시스템) 위성 네비게이션 시스템에 대한 기사를 여러분의 주목을 끌고 있습니다. 이 기사에서는 시스템의 구성 및 작동, 소비자 장비 (수신기)의 구조와 기능, 탐색 문제를 해결하기위한 알고리즘 및 시스템 개발 전망을 다룹니다.
고대부터 여행자들은 궁금해했습니다. 지구에서의 위치를 어떻게 결정할 것인가? 고대 항행자는 별의 안내를받으며 이동 방향을 표시했습니다. 평균 속도와 이동 시간을 알면 우주에서 탐색하고 최종 목적지까지의 거리를 결정할 수있었습니다. 그러나 기상 조건은 항상 연구자의 손에 달려있는 것이 아니므로 코스를 벗어나는 것이 어렵지 않았습니다. 나침반 작업의 출현과 함께 크게 단순화되었습니다. 여행자는 이미 날씨에 덜 의존하고 있습니다.
라디오의 시대는 사람에게 새로운 기회를 열어주었습니다. 레이더 스테이션이 출현하면서, 표면으로부터 반사 된 레이다 빔으로부터 물체의 모션 파라미터 및 상대 위치를 측정 할 수있게되었을 때, 방사 된 신호로부터 물체의 모션 파라미터를 측정 할 수 있는지의 문제가 발생했다. 1957 년 소련에서 과학자 그룹 V.A. 코텔 니코 바 (Kotelnikova)는 인공위성에 의해 방출 된 신호의 도플러 주파수 편이를 측정하여 인공 지구 위성 (AES)의 동작 매개 변수를 결정할 가능성을 실험적으로 확인했습니다. 그러나 가장 중요하게는,이 위성의 모션 파라미터와 좌표가 알려졌다면, 위성으로부터 방출 된 신호의 측정 된 도플러 편이로부터 수신기의 좌표를 찾는 역함수를 푸는 가능성이 확립되었다. 궤도를 여행 할 때, 위성은 특정 주파수의 신호를 방출하는데, 그 값은 수신 측 (소비자)에게 알려져있다. 각 시점에서의 위성의 위치는 더 정확하게 알려지며, 이는 위성 신호에 내장 된 정보에 기초하여 계산 될 수있다. 사용자는 자신에게 오는 신호의 주파수를 측정하여 기준 신호를 비교하여 위성의 움직임으로 인한 도플러 주파수 편이를 계산합니다. 측정은 지속적으로 이루어 지므로 도플러 주파수를 변경하는 일종의 기능을 만들 수 있습니다. 특정 시점에서 주파수는 0이되고 부호가 바뀝니다. 도플러 주파수가 0 일 때 소비자는 위성 모션 벡터에 수직 인 라인 상에있다. 소비자와 위성 간의 거리에 대한 도플러 주파수 곡선의 가파른 의존성을 이용하고 도플러 주파수가 0 일 때의 시점을 측정함으로써 소비자의 좌표를 계산하는 것이 가능하다.
따라서, 지구의 인공위성은 위성의 궤도에 따라 시간에 따라 변화하는 좌표 인 라디오 네비게이션 레퍼런스 스테이션이되지만, 위성 네비게이션 신호에 내장 된 천체력 정보로 인해 임의의 순간에 대해 미리 계산 될 수있다.
1958-1959 년 레닌 그라드 공군 공학 아카데미 (LVVIA)에서 A.F. Mozilisky는 소련 과학 아카데미의 이론 천문학 연구소, 소련 과학 기술 연구소의 전자 기계 연구소, 두 개의 해양 연구소 및 Gorky NIRFI가 최초의 러시아 저 궤도 항법 위성 시스템 "Tsikada"를 건설하기위한 기초가 된 주제 인 "위성"에 대한 연구를 수행했습니다. 그리고 1963 년이 시스템의 건설이 시작되었습니다. 1967 년 최초의 러시아 위성 Kosmos-192가 궤도에 진입했다. 1 세대 무선 항법 위성 시스템의 특징은 저궤도 위성의 사용과 현재 가시적 인 단일 위성 신호를 사용하여 물체의 탐색 매개 변수를 측정하는 것입니다. 그 후, Cicada 인공위성은 조난중인 물체를 탐지하기위한 수신 장비를 갖추고 있었다.
이와 동시에 John Hopkins University의 응용 물리학 실험실에서 미국 최초의 지구 인공 위성 소련의 성공적인 발사 후 인공위성이 방출하는 신호의 매개 변수를 측정 할 수있는 가능성에 관한 연구가 진행되고있다. 측정에 따르면, 위성 관측 매개 변수는 지상 관측 지점에 상대적으로 계산됩니다. 역 문제의 해법은 시간 문제입니다.
이 연구에 기초하여, 1 세대 도플러 위성 라디오 네비게이션 시스템 인 Transit은 1964 년에 미국에서 창안되었습니다. 그것의 주요 목적은 폴라리스 탄도 미사일의 잠수함을 발사하기위한 항법 지원이다. 이 시스템의 아버지는 Applied Physics Laboratory R. Kershner의 이사입니다. 상업용으로 사용하려면 1967 년에 시스템을 사용할 수있게됩니다. Cicada 시스템과 마찬가지로 Transit 시스템에서는 7 개의 보이는 위성 중 하나의 신호의 도플러 주파수 편이에서 소스 좌표가 계산됩니다. 위성 시스템은 지구의 표면에서 약 1,100km 높이의 원형 극성 궤도를 가지며, 대중 교통 위성 궤도의주기는 107 분입니다. 1 세대 시스템에서 소스의 좌표를 계산하는 정확도는 소스의 속도를 결정할 때의 오차에 크게 달려있다. 따라서 객체 속도가 0.5 m의 오차로 결정되면 ~500 m의 좌표를 결정하는 데 오류가 발생합니다. 고정 된 객체의 경우이 값은 50 m로 감소합니다.
또한이 시스템에서는 연속 작동이 불가능합니다. 시스템이 궤도가 낮기 때문에 위성이 소비자의 시야에있는 시간은 1 시간을 초과하지 않습니다. 또한 소비자의 시야 영역에서 다양한 위성이 지나가는 시간은 그가 위치하는 지리적 인 위도에 따라 달라지며 35-90 분 사이가 될 수 있습니다. 모든 위성이 동일한 주파수에서 신호를 방출하므로 위성 수를 늘려이 간격을 줄이는 것은 불가능합니다.
결론적으로, 제 2 세대 위성 네비게이션 시스템은 다수의 중요한 단점을 갖는다. 우선 동적 객체의 좌표를 결정할 때 정확성이 부족합니다. 단점은 측정에서 연속성이 결여되어 있기 때문일 수도 있습니다.
여러 위성에 대한 네비게이션 정의를 제공하는 위성 시스템을 만들 때 발생하는 주요 문제 중 하나는 필요한 정확도로 위성 신호 (시간 스케일)의 상호 동기화입니다. 10ns에서 기준 위성 제너레이터가 일치하지 않으면 소비자의 좌표를 결정하는 데 오차가 발생합니다. 고궤도 위성 항법 시스템을 개발할 때 개발자가 직면 한 두 번째 문제는 위성의 궤도 파라미터를 고정밀 도로 결정하고 예측하는 것이 었습니다. 수신기의 장비는 서로 다른 위성의 신호 지연을 측정하여 소비자의 좌표를 계산합니다.
이러한 목적으로 1967 년 미 해군은 TIMATION-I 위성을 발사 한 프로그램을 개발했고 1969 년에는 TIMATION-II 위성을 개발했습니다. 석영 발진기는이 인공위성에서 사용되었습니다. 동시에, 미국 공군은 의사 잡음 코드 (PRN)로 변조 된 광대역 신호의 사용에 관한 프로그램을 동시에 수행했습니다. 이러한 코드의 상관 특성을 통해 서로 다른 위성의 신호를 코드 분리하여 모든 위성에 대해 하나의 신호 주파수를 사용할 수 있습니다. 나중에, 1973 년에, 2 개의 프로그램은 "Navstar-GPS"에게 불린 1 개의 일반적인 프로그램으로 결합되었다. 1996 년까지이 시스템의 배치가 완료되었습니다. 현재 28 개의 활성 인공위성이 있습니다.
소련에서, Glonass 고궤도 위성 항법 시스템의 비행 시험은 Cosmos-1413 위성의 발사와 함께 1982 년에 시작되었다. 전체 우주 공간에서 시스템의 주요 개발자이자 창시자는 Applied Mechanics (Krasnoyarsk)의 NPO이고 항법 우주선은 Polet 소프트웨어 (Omsk)입니다. 무선 시스템의 선두 개발 업체는 RNIIKP입니다. 러시아 전파 항법 연구소 (Radio Navigation and Time)는 시간 콤플렉스, 동기화 시스템 및 소비자 네비게이션 장비 제작에 대한 책임자로 확인되었습니다.
Glonass 네트워크 무선 항법 위성 시스템 (SRNSS)
Glonass 시스템은 표면 이동 물체의 글로벌 조작 항법을 위해 설계되었습니다. SRNSS는 국방부의 명령으로 개발되었습니다. 그 구조에서 Glonass는 GPS뿐만 아니라 군사 및 민간 목적으로 사용될 수있는 이중 동작 시스템으로 간주됩니다.
시스템은 전체적으로 세 가지 기능적 부분을 포함합니다 (전문 문헌에서 이러한 부분을 세그먼트라고 함) (그림 1).
그림 1. 고궤도 항법 시스템의 세그먼트 Glonass 및 GPS
인공위성 인공위성의 궤도 그룹화를 포함하는 공간 세그먼트 (즉, 항법 우주선);
제어 세그먼트, 우주선의 궤도 그룹의 지상 제어 단지 (NKU);
시스템의 장비 사용자.
이 세 부분 중 후자 인 사용자 장비가 가장 많습니다. Glonass 시스템은 쿼리가 필요 없으므로 시스템의 사용자 수는 중요하지 않습니다. 주요 기능인 탐색 정의 외에도 시스템은 원격지면 물체와 상호 측량 참조에서 주파수와 시간 표준에 대한 매우 정확한 상호 동기화를 허용합니다. 또한 네비게이션 위성의 신호를 수신하는 네 개의 수신기를 기준으로 개체의 방향을 결정하는 데 사용할 수 있습니다.
Glonass 시스템에서 ~ 19,100km 고도의 순환 정지 궤도에서 회전하는 네비게이션 우주선 (NKA)은 ~ 19,100km 고도의 무선 항법 장치로 사용됩니다 (그림 2). 지구 주위 위성의 궤도주기는 평균 11 시간 45 분입니다. 위성의 작동 시간은 약 5 년이며,이 시간 동안 궤도의 매개 변수는 공칭 값과 5 % 이상 차이가 없어야합니다. 위성 자체는 직경 1.35m, 길이 7.84m의 밀폐 용기이며, 내부에는 다양한 종류의 장비가 수용됩니다. 모든 시스템은 태양열 패널로 구동됩니다. 총 위성 1415kg. 온보드 장비에는 온보드 항법 송신기, 크로노 나이저 (시계), 온보드 제어 콤플렉스, 방향 및 안정화 시스템 등이 포함됩니다.
그림 2. GLONASS 및 GPS 시스템의 공간 세그먼트
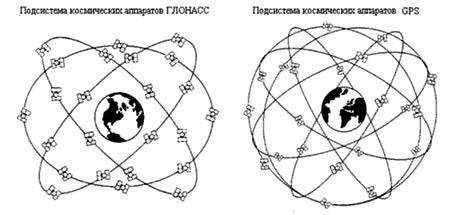
그림 3. Glonass 시스템의 지상 제어 단지의 세그먼트
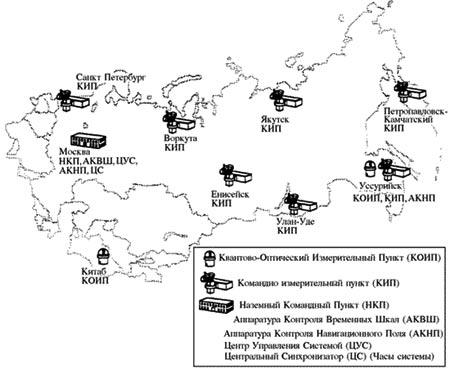
그림 4. 지상 GPS 제어 콤플렉스 세그먼트
GLONASS 지상 통제 단지는 다음과 같은 기능을 수행합니다 :
천문력 및 시간 - 주파수 지원;
무선 항행 분야의 감시;
라디오 원격 측정 모니터링;
명령 및 프로그램 라디오 컨트롤 NKA.
다양한 위성의 시간 스케일을 NKA에 요구되는 정확도와 동기화시키기 위해, 10-13의 차수의 상대적으로 불안정한 세슘 주파수 표준이 사용된다. 지면 대조군은 상대적 불안정성이 10-14 인 수소 표준을 사용합니다. 또한, NKU는 기준 스케일과 관련하여 위성 시간 스케일을 3√5 ns의 오차로 보정하기위한 수단을 포함한다.
지상 세그먼트는 천체력 위성 지원을 제공합니다. 이는 인공위성 동작의 매개 변수가 지구에서 결정되고 이러한 매개 변수의 값이 미리 정해진 기간 동안 예측된다는 것을 의미합니다. 매개 변수 및 그들의 예측은 항법 신호의 전송과 함께 위성에 의해 전송 된 항법 메시지에 놓여있다. 여기에는 시스템 시간에 비례 한 위성 시간 스케일의 주파수 - 시간 보정도 포함됩니다. NCA의 동작 매개 변수 측정 및 예측은 위성까지의 거리 및 방사 속도의 궤적 측정 결과에 따라 시스템의 탄도 중심에서 이루어집니다.
네트워크 GPS 네비게이션 위성 시스템
미국 GPS 시스템의 기능은 국내 Glonass 시스템과 유사합니다. 주요 목적은 소비자의 좌표, 속도 벡터의 구성 요소를 정확하게 결정하고 시스템 시간 척도에 바인딩하는 것입니다. 국내와 마찬가지로 GPS 시스템은 미국 국방성을 위해 개발되었으며 통제하에 있습니다. 인터페이스 제어 문서에 따르면 시스템의 주요 개발자는 다음과 같습니다.
공간 세그먼트 - 로크 웰 국제 우주 부문, 마틴 마리에타 우주 공간 부문;
관리 부문 - IBM, Federal System Company;
소비자 부문별로 - Rockwell International, Collins Avio-nics & Communication Division.
Glonass 시스템과 마찬가지로 GPS는 공간 세그먼트, 지상 기반의 명령 측정 단지 및 소비자 세그먼트로 구성됩니다.
위에서 언급했듯이 GPS 궤도 별자리는 28 개의 항법 우주선으로 구성됩니다. 그들 모두는 12 시간에 달하는 지구 주위의 자전주기를 가진 원형 궤도에있다. 각 위성의 궤도 고도는 ~ 20,000 km입니다. GPS 시스템의 NCA는 일반적으로 성능에 영향을주는 여러 가지 개선 사항을 거쳤습니다. 탭. 1은 시스템에 사용 된 우주선의 간단한 특성을 보여준다.
표 1. GPS 시스템에 사용 된 우주선의 특성
|
궤도의 질량 |
에너지 원의 동력, W |
예상 수명 |
최초의 NCA 출시 년도 |
|
표 2. GLONASS 및 GPS 시스템의 비교 특성
|
지표 | ||
|
전체 궤도 그룹에서의 우주선 수 | ||
|
궤도면의 수 | ||
|
각 비행기의 우주선 수 | ||
|
궤도 경사 | ||
|
궤도 고도, km | ||
|
위성 회전주기 |
11 시간 15 분. 44 초 |
11 시간 58 분. 00 초 |
|
좌표계 | ||
|
항법 위성의 질량, kg | ||
|
태양 광 발전, W | ||
|
활동적인 존재의 기간, 년 | ||
|
우주선을 궤도에 진입시키는 수단 |
"프로톤 -K / DM" | |
|
발사 당 표시되는 우주선의 수 | ||
|
우주선 |
바이 코 누르 (카자흐스탄) |
케이프 커 내버 럴 (케이프 커 내버 럴) |
|
기준 시간 | ||
|
액세스 방법 | ||
|
캐리어 주파수 : L1 L2 |
1598.06251604.25 7/9 L1 |
1575.42 60/77 L1 |
|
양극화 |
오른쪽 양면 |
오른쪽 양면 |
|
유형 의사 잡음 시퀀스 |
m- 시퀀스 |
골드 코드 |
|
코드 포인트 수 : C / A P | ||
|
코딩 속도, Mbps : C / A P | ||
|
내부 시스템 간섭 레벨, dB | ||
|
탐색 메시지 구조 |
||
|
전송 속도, bps | ||
|
변조 유형 |
BPSK (맨체스터) | |
|
수퍼 프레임 길이, 분. |
2.5 (5 프레임) |
12.5 (25 프레임) |
|
프레임 길이 |
30 (15 행) |
30 (5 행) |
|
선 길이 | ||
시스템 전체와 특히 NCA를 설계 할 때 자율적 운영 문제에 많은주의를 기울입니다. 따라서 1 세대 우주선 (블록 I)은 3-4 일 동안 제어 세그먼트를 개입시키지 않고 시스템의 정상적인 작동 (좌표 결정에 심각한 오류없이 의미)을 보장했습니다. Block II 장치에서이 기간은 14 일로 연장되었습니다. NKA의 새로운 수정에서 Block-IIR은 인공위성의 상호 동기화의 자율적 인 복합 단지를 사용하여 지상에서 궤도 매개 변수를 조정하지 않고 180 일 동안 자율적 인 작동을 허용합니다. Block-IIF의 장치는 사용 된 Block-IIR 대신에 사용되어야한다.
네비게이션 무선 신호 시스템의 구조
Glonass 시스템은 각 위성에서 방출되는 신호 (FDMA)의 주파수 분리 - 2 개의 위상 편이 된 신호를 사용합니다. 첫 번째 신호의 주파수는 L1 ~ 1600 MHz 범위에 있고 두 번째 주파수는 L2 ~ 1250 MHz 범위에 있습니다. L1 및 L2 대역에서 송신되는 무선 신호의 동작 주파수의 공칭 값은 다음 식으로 정의된다.
f1 + kf1f2 = f2 + kf2k = 0,1, ..., 24, (1)
k = 0,1, ..., 24 - 위성 작동 주파수 문자 (채널) 수.
f1 = 1602 MHz, f1 = 9/16 = 0.5625 MHz; f2 = 1246MHz, f2 = 7 / 16 = 0.4375MHz.
각 위성에 대해, L1 및 L2 범위의 신호의 동작 주파수는 일관되고 단일 주파수 기준으로부터 형성된다. 각 위성의 반송파의 운용 주파수 비율 :
fk1 / fk2 = 7 / 9이다.
지구 표면에있는 관찰자의 관점에서 온보드 발전기의 공칭 주파수는 5.0MHz입니다.
L1 대역에서 Glonass 시스템의 각 위성은 동일한 주파수에서 2 개의 반송파를 내보내고 서로 90 ° 위상차가 있습니다 (그림 5).
그림 5. GLONASS 및 GPS 시스템의 반송파 벡터 다이어그램
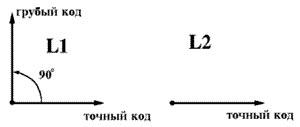
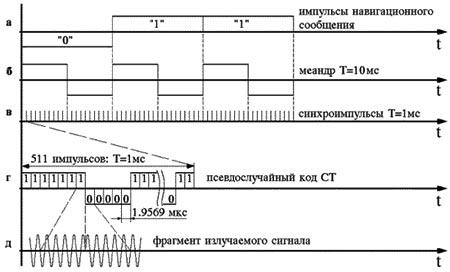
캐리어 중 하나가 180 °에서 위상 조작을받습니다. 변조 신호는 모듈로 2 3 개의 이진 신호를 가산하여 얻습니다 (그림 6).
511 Kbps의 속도로 전송 된 거친 레인 징 코드 (도 6c);
50 비트 / 초로 전송 된 네비게이션 데이터의 시퀀스 (그림 6a);
미 앤더 진동은 100 bps의 속도로 전송됩니다 (그림 6b).
그림 6. GLONASS 신호의 구조
L1 범위의 신호 (GPS의 C / A 코드와 유사)는 우주선의 시야에서 모든 소비자가 사용할 수 있습니다. L2 범위의 신호는 군대의 요구를위한 것이며 구조는 공개되지 않습니다.
Glonass 인공위성의 항법 메시지의 구성과 구조
네비게이션 메시지는 2 초마다 연속적으로 이어지는 형태로 형성됩니다. 첫 번째 부분 (1.7 초 간격)에서 네비게이션 데이터가 전송되고 두 번째 (0.3 초) - 타임 스탬프가 전송됩니다. 이는 100 bps의 클럭 주파수를 갖는 30 개의 심볼로 구성된 단축 된 의사 랜덤 시퀀스입니다.
Glonass 위성의 네비게이션 메시지는 네비게이션 정의 및 위성과의 통신 세션 계획을 위해 소비자가 필요로합니다. 그 내용에 따르면, 네비게이션 메시지는 운영 및 비 운영 정보로 나뉘어져 있습니다.
운용 정보는 그것이 수신 된 신호로부터 위성과 관련된다. 운영 정보에는 다음이 포함됩니다.
타임 스탬핑;
위성 반송파 주파수와 공칭 값 사이의 상대적인 차이;
궤도 력 정보.
하루의 시작부터 30 분의 다중성을 갖는 천체력 정보 및 주파수 - 시간 보정의 바인딩 시간은 위성의 지리적 좌표 및 속도를 정확하게 결정할 수있게합니다.
비 작동 정보에는 다음과 같은 연감이 포함됩니다.
시스템의 모든 위성의 상태에 관한 데이터;
시스템 스케일에 비례하는 위성 시간 스케일 쉬프트;
시스템의 모든 위성들의 궤도 파라미터들;
glonass 시스템의 시간 척도에 대한 개정.
우주선의 최적 "별자리 (constellation)"의 선택과 반송파 주파수의 도플러 이동 예측은 시스템의 연감 (almanac)을 분석하여 제공됩니다.
Glonass 시스템의 위성들의 네비게이션 메시지들은 2.5 분의 지속 시간을 갖는 수퍼 프레임들로 구조화된다. 수퍼 프레임은 30 초의 지속 시간을 갖는 5 개의 프레임으로 구성됩니다. 각 프레임에는 2 초의 지속 시간을 갖는 15 개의 라인이 있습니다. 2 초에서 마지막 0.3 초가 시간 소인을 사용합니다. 나머지 줄에는 50Hz로 전송되는 85 개의 디지털 정보가 들어 있습니다.
각 프레임에는 운영 정보의 전체 양과 시스템의 연감의 일부가 들어 있습니다. 수퍼 프레임 전체에 포함 된 전체 연감 동시에, 라인 1√4에 포함 된 수퍼 프레임의 정보는 그것이 오는 (작동 부분 인) 위성을 지칭하며, 수퍼 프레임 내에서 변하지 않는다.
GPS 네비게이션 라디오 구조
GPS는 신호의 코드 분할 (CDMA)을 사용하므로 모든 위성이 동일한 주파수로 신호를 방출합니다. 각 GPS 위성은 두 개의 위상 편이 된 신호를 방출합니다. 제 1 신호의 주파수는 L1 = 1575.42 MHz이고, 제 2-L2 = 1227.6 MHz이다. 반송파 주파수 신호 (L1)는 두 개의 2 진수열에 의해 변조되며, 각각은 50 비트 / 초로 생성 된 레인 징 코드 및 송신 된 시스템 및 네비게이션 데이터를 모듈로 2 합산하여 형성된다. L1 주파수에서, 2 개의 직교 성분이 전송되고, 바이너리 시퀀스에 의해 바이 페이즈 조작된다. 제 1 시퀀스는 정확한 레인 징 코드 P 또는 비밀 Y 코드 및 네비게이션 데이터의 모듈로 2의 합이다. 두 번째 시퀀스는 또한 거친 C / A (개방) 코드와 동일한 탐색 데이터 시퀀스의 모듈로 2 합입니다.
L2 주파수의 무선 신호는 이전에 고려 된 두 개의 시퀀스 중 하나에 의해서만 바이 페이즈로 조작됩니다. 변조 시퀀스의 선택은 지구로부터의 명령에 의해 수행됩니다.
각 위성은 위성 신호를 분리 할 수있는 고유 한 C / A 및 P (Y) 거리 코드를 사용합니다. 정확한 레인 징 P (Y) 코드를 형성하는 과정에서 위성 타임 스탬프가 동시에 생성됩니다.
GPS 위성의 네비게이션 메시지 구성 및 구조
GPS 위성의 네비게이션 정보의 구조적 분할은 수퍼 프레임, 프레임, 서브 프레임 및 단어로 수행됩니다. 수퍼 프레임은 25 프레임으로 구성되며 750 초 (12.5 분) 걸립니다. 하나의 프레임은 30 초 동안 전송되고 1500 비트의 크기입니다. 프레임은 각각 300 비트의 5 개의 서브 프레임으로 분할되어 6 초 간격으로 전송됩니다. 각 서브 프레임의 시작은 다음 6 초 GPS 시스템 시간 간격의 시작 / 끝에 해당하는 타임 스탬프를 나타냅니다. Podcat은 10 개의 30 비트 단어로 구성됩니다. 각 단어에서 6 개의 최하위 비트는 검사 비트입니다.
제 1, 제 2 및 제 3 서브 프레임에서는, 통신이 확립 된 우주선의 시계 및 에피 메리 스 데이터의 보정 파라미터에 관한 데이터가 전송된다. 이러한 서브 프레임의 내용과 구조는 수퍼 프레임의 모든 페이지에서 변경되지 않습니다. 4 번째 및 5 번째 서브 프레임에는 모든 우주선 인공위성, 우주선 연감, 특수 메시지, GPS 시간과 UTC 간의 관계를 설명하는 매개 변수 등의 구성 및 상태에 대한 정보가 들어 있습니다.
위성 항법 신호의 수신 및 측정 알고리즘
GPS 및 GLONASS 시스템의 소비자 부문에는 위성 신호 수신기가 포함됩니다. 이러한 신호의 매개 변수를 측정하면 탐색 문제가 해결됩니다. 수신기는 세 가지 기능적 부분으로 나눌 수 있습니다.
무선 주파수 부분;
디지털 상관기;
프로세서
안테나 피더 장치 (안테나)의 출력에서 신호는 무선 주파수 부분으로 이동합니다 (그림 7). 이 부분의 주요 목적은 입력 신호, 필터링, 주파수 변환 및 아날로그 - 디지털 변환을 증폭하는 것입니다. 또한, 수신기의 무선 주파수 부분은 수신기의 디지털 부분에 대한 클록 주파수를 수신한다. 무선 주파수 부분의 출력으로부터, 입력 신호의 디지털 샘플은 디지털 상관기의 입력으로 공급된다.
그림 7. 일반화 된 수신기 구조
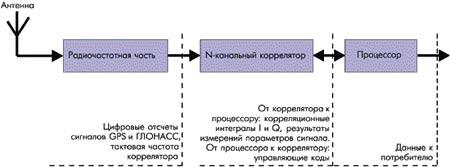
상관기에서 신호 스펙트럼은 "제로"주파수로 전송됩니다. 이것은 상관기의 입력 신호에 동상 및 직교 채널의 기준 고조파 발진을 곱하여 수행됩니다. 다음으로, 상기 승산 결과는 상기 레퍼런스 레인 징 코드와 곱해지고 상기 레인 징 코드의주기 상에 누적되어 상관 처리 과정을 통과한다. 결과적으로, 우리는 상관 적분 I과 Q를 얻습니다. 상관 적분은 PLL 루프 (위상 고정 루프)와 CVD (지연 추적 회로)를 추가로 처리하고 잠그기 위해 프로세서에 공급됩니다. 수신기에서 신호 매개 변수의 측정은 입력 신호에서 직접적으로 이루어지지 않고 PLL 및 CVD 시스템에 의해 형성되는 정확한 사본으로 이루어집니다. 상관 적분 I와 Q는 기준 신호와 입력 신호의 "유사도"(상관 관계)의 정도를 추정 할 수있게합니다. 상관기의 임무는, 적분 I 및 Q의 형성뿐만 아니라, 프로세서로부터 수신 된 제어 동작 (제어 코드)에 따라 기준 신호를 형성하는 것이다. 또한, 일부 수신기에서, 상관기는 기준 신호의 필요한 측정치를 생성하고 추가 처리를 위해 프로세서로 전송한다. 동시에, 상관기 내의 기준 신호는 프로세서로부터 수신 된 제어 코드로부터 생성되기 때문에, 참조 신호의 필요한 측정은 프로세서에서 직접 이루어질 수 있으며 그에 따라 많은 최신 수신기에서 수행되는 제어 코드를 처리합니다.
상관기 (프로세서)는 어떤 신호 매개 변수를 측정합니까?
무선 측정 범위는 측정 대상에서 측정 지점까지의 신호 전파 시간을 특징으로합니다. GPS / GLONASS 네비게이션 시스템에서, 신호의 방출은 시스템의 시간 스케일,보다 정확하게는이 신호를 방출하는 위성의 시간 스케일과 동기화됩니다. 동시에 소비자는 위성의 시간 척도와 시스템 간의 불일치에 대한 정보를 가지고있다. 위성에서 전송 된 디지털 정보를 사용하여 시스템 시간의 위성에 의한 특정 신호 단편 (타임 스탬프)의 방출 순간을 설정할 수 있습니다. 이 단편의 수신 순간은 수신기의 시간 척도에 의해 결정됩니다. 수신기 (소비자)의 시간 규모는 석영 주파수 표준을 사용하여 형성되기 때문에 수신기의 시간 척도가 시스템의 시간 척도와 관련하여 일정한 "이탈"이 있습니다. 수신기의 시간 척도로 계산 된 신호 조각의 수신 순간과 인공위성의 눈금에 곱해진 위성의 방사선 순간에 빛의 속도를 곱한 값의 차이는 의사 거리라고 불립니다. 왜 의사 범위인가? 이는 시스템 시간 스케일에 상대적인 수신기 시간 스케일의 "출발"에 의한 빛의 속도의 곱과 동일한 양만큼 실제 범위와 다르므로. 탐색 문제를 해결할 때이 매개 변수는 소비자 (수신기)의 좌표와 함께 결정됩니다.
상관기에서 형성된 상관 적분은 정보 심볼로 위성 신호의 변조를 추적하고 입력 신호의 타임 스탬프를 계산하는 것을 가능하게한다. 타임 스탬프는 GPS의 경우 6 초, GLONASS의 경우 2 초, 6 초 (2) 초의 종류로 구성됩니다. 이 눈금의 한 눈금 범위 내에서 눈금 표시 코드의 기간은 1-MS 눈금을 형성합니다. 1 millisecond는 개별 요소 (GPS 용어의 칩)로 나뉘어집니다 : GPS-1023의 경우 GLONASS-511의 경우. 따라서 거리 측정 코드의 요소를 사용하면 ~ 300m의 오차로 위성까지의 거리를 결정할 수 있습니다. 레인 징 코드 생성기의 위상을 알아야 할 필요가있다. 상관기의 기준 생성기를 구성하는 기법은 의사주기를 3m로 결정하는 정확도 인 0.01주기의 정확도로 위상을 결정할 수있다
PLL 시스템에 의해 생성 된 기준 고조파 발진의 파라미터의 측정에 기초하여, 위성의 반송파 발진의 주파수 및 위상을 결정한다. 공칭 값에 대한 그것의 이탈은 위성에 대한 소비자의 속도에 의해 추정되는 도플러 주파수 오프셋을 제공 할 것이다. 또한 반송파 위상 측정을 통해 수 밀리미터의 오차로 위성까지의 거리를 지정할 수 있습니다.
소비자의 좌표 결정
소비자의 좌표를 결정하려면 위성의 좌표 (최소 4)와 소비자에서 눈에 보이는 위성까지의 거리를 알아야합니다. 소비자가 위성의 좌표를 결정하기 위해, 위성에 의해 방출되는 네비게이션 신호는 그들의 움직임의 파라미터에 관한 메시지에 의해 모델링된다. 소비자의 장비에는 이러한 메시지의 선택과 적시에 위성 좌표의 결정이 있습니다.
속도 벡터의 좌표와 구성 요소는 매우 빠르게 변화하므로 위성 모션 매개 변수에 대한 메시지에는 좌표와 속도 벡터 구성 요소가 아닌, 충분히 긴 시간 간격 (약 30 분) 동안 우주선의 모션 궤적을 근사하는 특정 모델의 매개 변수에 대한 정보가 포함됩니다. 근사 모델의 매개 변수는 다소 천천히 변하므로 근사 간격에 대해 일정한 것으로 간주 될 수 있습니다.
근사 모델의 파라미터는 위성 항법 메시지에 포함됩니다. GPS 시스템은 요소를 움직이는 Kepler 모션 모델을 사용합니다. 이 경우, 우주선의 비행 궤적은 1 시간의 근사 영역으로 나누어진다. 각 섹션의 중앙에는 노드 시점이 설정되며,이 값은 네비게이션 정보의 소비자에게 전달됩니다. 또한 소비자는 마디 시점에서 요소를 모델링하는 매개 변수뿐만 아니라 이전 마디 요소와 그 뒤에 오는 노드 요소의 시간에 따라 요소를 모델링하는 매개 변수의 변화를 근사화하는 함수의 매개 변수를 알 수 있습니다.
소비자의 장비에있어서, 위성의 위치가 결정되는 순간과 노드 순간이 구별되는 시간 사이의 시간 간격. 그런 다음 탐색 메시지에서 추출한 근사 함수와 매개 변수를 사용하여 원하는 시점에 함수 요소 모델의 매개 변수 값을 계산합니다. 마지막 단계에서 위성 속도 벡터의 좌표와 구성 요소는 일반적인 Keplerian 모델 공식을 사용하여 결정됩니다.
Glonass 시스템에서 차동 모션 모델은 위성의 정확한 위치를 결정하는 데 사용됩니다. 이 모델에서 인공위성 속도 벡터의 좌표와 구성 요소는 우주선에 작용하는 힘의 유한 수를 고려한 우주선 운동의 미분 방정식의 수치 적 적분에 의해 결정됩니다. 초기 통합 조건은 근사 간격의 중간에있는 노드 시점에서 지정됩니다.
위에서 언급했듯이, 소비자의 좌표를 결정하기 위해서는 적어도 약 4 미터의 정확도로 내비게이션 수신기에서 결정되는 위성의 좌표 (최소 4)와 소비자로부터 보이는 각 위성까지의 거리를 알아야합니다. 편의상, 그림에서 보여지는 가장 단순한 "평면"케이스를 고려하십시오 . 8
그림 8. 소비자의 좌표 결정
각 위성 (그림 8)은 포인트 이미 터로 나타낼 수 있습니다. 이 경우, 전자기파의 전방은 구형이 될 것이다. 두 가지 영역이 교차하는 지점은 소비자가있는 지점이됩니다.
위성 궤도의 높이는 약 20,000km입니다. 결과적으로, 원의 두 번째 교차점은 멀리있는 공간에 있기 때문에 선험적 정보로 인해 거부 될 수 있습니다.
차동 모드
위성 네비게이션 시스템은 소비자가 약 10-15 미터의 정확도로 좌표를 얻을 수있게 해준다. 그러나 많은 작업, 특히 도시에서의 네비게이션을 위해서는 더 높은 정확도가 요구된다. 물체의 위치를 결정하는 정확성을 향상시키는 주된 방법 중 하나는 무선 항법에서 알려진 차동 항법 측정의 원리 적용에 근거합니다.
차동 모드 DGPS (Differential GPS)를 사용하면 동적 탐색 환경에서 3m의 정확도와 정지 상태에서 최대 1m의 좌표를 설정할 수 있습니다. 차동 모드는 참조 스테이션이라고하는 제어 GPS 수신기를 사용하여 구현됩니다. GPS 수신기와 동일한 영역에 알려진 좌표가있는 지점에 있습니다. 알려진 좌표 (정밀 측지 측량의 결과로 얻어진)를 측정치와 비교함으로써, 기준 스테이션은 공기를 통해 미리 결정된 포맷으로 소비자에게 전송되는 보정치를 계산한다.
소비자 장비는 기준 스테이션으로부터 차등 보정을 받아 소비자의 위치를 결정할 때이를 고려합니다.
차동 방법을 사용하여 얻은 결과는 주로 대상과 참조 스테이션 간의 거리에 따라 달라집니다. 이 방법의 사용은 외부 (수신기에 대한)로 인한 체계적인 오류가 우세 할 때 가장 효과적이다. 실험 데이터에 따르면, 기준 역은 물체로부터 500km를 넘지 않는 것이 좋습니다.
현재 많은 광역, 지역 및 지역 차별 시스템이 있습니다.
미국의 WAAS, 유럽의 EGNOS 및 일본의 MSAS와 같은 시스템은 넓은 간격으로 주목할 가치가 있습니다. 이 시스템은 정지 위성을 사용하여 서비스 지역의 모든 소비자에게 정정을 전송합니다.
지역 시스템은 지구 표면의 특정 영역에 대한 탐색 지원을 위해 설계되었습니다. 일반적으로 지역 시스템은 대도시, 고속도로 및 항행하기 쉬운 강, 항구 및 바다와 바다의 해안을 따라 사용됩니다. 지역 시스템의 작업 지역의 지름은 보통 500 ~ 2000km이다. 하나 이상의 참조 스테이션을 가질 수 있습니다.
로컬 시스템의 최대 범위는 50 ~ 220km입니다. 여기에는 대개 하나의 기지국이 포함됩니다. 지역 시스템은 일반적으로 해양, 항공 및 측지 지역 차별 방송국과 같이 적용 방법에 따라 분류됩니다.
위성 네비게이션 개발
GPS 및 Glonass 위성 시스템의 근대화의 일반적인 방향은 항법 정의의 정확성 향상, 사용자에게 제공되는 서비스 개선, 온보드 위성 장비의 서비스 수명 및 신뢰성 증가, 다른 무선 시스템과의 호환성 개선 및 차동 서브 시스템 개발과 관련됩니다. GPS 시스템과 Glonass의 일반적인 개발 방향은 동일하지만 달성 된 역학과 결과는 매우 다릅니다.
GLONASS 시스템의 개선은 차세대 GLONASS-M 위성을 기반으로 수행 될 계획이다. 이 위성은 향상된 수명을 가지며 민간용 애플리케이션을 위해 L2 범위에서 내비게이션 신호를 방출합니다.
1999 년 1 월 5 일에 L2 주파수 (1222.7 MHz)에서 C / A 코드의 전송과 관련된 GPS 시스템을 업그레이드하고 3 번째 운송 업체 인 L3 (1176)을 도입하기 위해 4 억 달러를 배정한다고 미국에서 유사한 결정이 내려졌습니다. 45 MHz)를 2005 년에 출시 할 위성에 탑재했다. L2 주파수의 신호는 인간의 삶의 위험과 직접적인 관련이없는 민간용으로 사용하기위한 것입니다. 2003 년이 결정의 이행을 시작하는 것이 제안된다. 민간 항공 수요를 위해 L3 주파수에서 세 번째 시민 신호를 사용하기로 결정되었습니다.
문학
무선 시스템. 에드. Kazarinova Yu.M. M .: Higher School, 1990.
유 솔로 비프 위성 항법 시스템. M : Eco-Trendz, 2000 년
세계 위성 전파 항법 시스템 GLONASS / Ed. V.N. Harisova, A.I. Perova, V.A. 볼딘. M .: IPRZHR, 1998.
립킨 I.A. 위성 항법 시스템. M .: University book, 2001.
글로벌 항법 위성 시스템 GLONASS. 인터페이스 제어 문서. M : KNITS VKS, 1995.
인터페이스 제어 문서 : NAVSTAR GPS 공간 세그먼트 / 내비게이션 사용자 인터페이스 (ICD-GPS-200).Rockwell Int. Corp. 1987