วงโคจรของโลกคือระยะห่างจากโลก ประเภทของวงโคจรดาวเทียมและคำจำกัดความ
ในวงโคจรค้างฟ้า ดาวเทียมจะไม่เข้าใกล้หรือเคลื่อนออกจากโลก และยิ่งไปกว่านั้น เมื่อหมุนไปพร้อมกับโลก ดาวเทียมจะอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรตลอดเวลา ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจึงต้องสร้างสมดุลซึ่งกันและกัน ในการคำนวณความสูงของวงโคจรค้างฟ้า คุณสามารถใช้วิธีนี้ได้ กลศาสตร์คลาสสิกและเมื่อเคลื่อนไปยังกรอบอ้างอิงของดาวเทียม ให้ดำเนินการจากสมการต่อไปนี้
แรงเฉื่อยอยู่ที่ไหน และในกรณีนี้ แรงเหวี่ยง คือแรงโน้มถ่วง ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้ตามกฎแรงโน้มถ่วงสากลของนิวตัน:
![]()
โดยที่มวลของดาวเทียมคือมวลของโลกเป็นกิโลกรัม คือค่าคงที่แรงโน้มถ่วง และคือรัศมีของวงโคจร (ระยะห่างเป็นเมตรจากดาวเทียมถึงศูนย์กลางโลก)
ขนาดของแรงเหวี่ยงหนีศูนย์เท่ากับ:
โดยที่คือความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
ดังที่เห็น มวลของดาวเทียมแสดงอยู่ในทั้งแรงหนีศูนย์กลางและแรงโน้มถ่วง นั่นคือ ความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลมาจากความเท่าเทียมกันของมวลความโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรค้างฟ้าจะถูกกำหนดโดยระดับความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะมีขนาดเท่ากันและตรงกันข้ามในทิศทางกับแรงโน้มถ่วงที่สร้างขึ้นโดยแรงโน้มถ่วงของโลกที่ระดับความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางเท่ากับ:
โดยที่ คือ ความเร็วเชิงมุมของการหมุนของดาวเทียม มีหน่วยเป็นเรเดียนต่อวินาที
จากความเท่าเทียมกันของแรงโน้มถ่วงและแรงเหวี่ยงเราได้รับ:
![]()
ความเร็วเชิงมุม ω
คำนวณโดยการหารมุมที่เคลื่อนที่ในการปฏิวัติหนึ่งครั้งด้วยคาบการโคจร (เวลาที่ใช้ในการหมุนการปฏิวัติในวงโคจรครบหนึ่งครั้ง: วันหนึ่งดาวฤกษ์หรือ 86,164 วินาที) เราได้รับ: ![]() ราด/เอส
ราด/เอส
รัศมีวงโคจรโดยประมาณคือ 42,164 กม. เมื่อลบรัศมีเส้นศูนย์สูตรของโลกออกไป 6,378 กม. เราจะได้ระดับความสูง GSO ที่ 35,786 กม.
ความเร็ววงโคจร
ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณ ความเร็วเชิงมุมต่อรัศมีวงโคจร: กม./วินาที
ซึ่งน้อยกว่าความเร็วหลุดพ้นครั้งแรกประมาณ 8 กม./วินาที สำหรับวงโคจรใกล้โลก (โดยมีรัศมี 6,400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรวงกลมนั้นแปรผกผันกับรัศมี ความเร็วที่ลดลงเมื่อเทียบกับความเร็วจักรวาลแรกจึงทำได้โดยการเพิ่มรัศมีวงโคจรมากกว่า 6 เท่า
ความยาววงโคจร
ความยาววงโคจรค้างฟ้า: . ด้วยรัศมีวงโคจร 42,164 กม. เราจะได้ความยาววงโคจร 264,924 กม. ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "จุดยืน" ของดาวเทียม
การรักษาดาวเทียมให้อยู่ในตำแหน่งวงโคจรในวงโคจรค้างฟ้า ดาวเทียมที่โคจรอยู่ในวงโคจรค้างฟ้าอยู่ภายใต้อิทธิพลของแรงจำนวนหนึ่ง (การรบกวน) ที่เปลี่ยนแปลงพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่งการรบกวนดังกล่าว ได้แก่ การรบกวนจากแรงโน้มถ่วงของดวงจันทร์-ดวงอาทิตย์ อิทธิพลของความไม่สอดคล้องกันของสนามโน้มถ่วงของโลก วงรีของเส้นศูนย์สูตร เป็นต้น ความเสื่อมโทรมของวงโคจรแสดงออกมาในสองปรากฏการณ์หลัก:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งวงโคจรเดิมไปยังจุดใดจุดหนึ่งจากสี่จุดที่มีความสมดุลเสถียร ซึ่งเรียกว่า "หลุมที่มีศักยภาพของวงโคจรค้างฟ้า" (ลองจิจูดคือ 75.3°E, 104.7°W, 165.3°E และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก;
2) ความเอียงของวงโคจรถึงเส้นศูนย์สูตรเพิ่มขึ้น (จากจุดเริ่มต้น = 0) ในอัตราลำดับ 0.85 องศาต่อปี และถึง ค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยการรบกวนเหล่านี้และรักษาดาวเทียมให้อยู่ในจุดที่หยุดนิ่งที่กำหนด ดาวเทียมจึงติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) ด้วยการเปิดเครื่องยนต์แรงขับต่ำเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความโน้มเอียงของวงโคจรที่เพิ่มขึ้น และ "ตะวันตก-ตะวันออก" เพื่อชดเชยการเคลื่อนตัวไปตามวงโคจร) ดาวเทียมจะถูกเก็บไว้ที่จุดหยุดนิ่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งทุกๆ สองสาม (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขแนวเหนือ-ใต้ต้องการความเร็วลักษณะเฉพาะเพิ่มขึ้นอย่างมาก (ประมาณ 45-50 เมตร/วินาทีต่อปี) มากกว่าการแก้ไขตามยาว (ประมาณ 2 เมตร/วินาทีต่อปี) เพื่อให้แน่ใจว่าการแก้ไขวงโคจรของดาวเทียมตลอดอายุการใช้งาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจ่ายเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีที่ใช้เครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีระบบจ่ายเชื้อเพลิงแบบแทนที่ (เพิ่มแก๊ส - ฮีเลียม) และทำงานบนส่วนประกอบที่มีจุดเดือดสูงและมีอายุการใช้งานยาวนาน (โดยปกติจะเป็นไดเมทิลไฮดราซีนและไนโตรเจนเตตรอกไซด์ที่ไม่สมมาตร) ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องยนต์พลาสมา แรงขับของพวกมันน้อยกว่าแรงขับของสารเคมีอย่างมาก แต่ช่วยให้มีประสิทธิภาพมากขึ้น (เนื่องจาก ทำงานที่ยาวนานซึ่งวัดภายในสิบนาทีสำหรับการซ้อมรบเพียงครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเครื่องบินลงอย่างมาก การเลือกประเภทระบบขับเคลื่อนจะถูกกำหนดโดยเฉพาะ คุณสมบัติทางเทคนิคอุปกรณ์
หากจำเป็น จะใช้ระบบขับเคลื่อนเดียวกันนี้เพื่อเคลื่อนย้ายดาวเทียมไปยังตำแหน่งอื่นในวงโคจร ในบางกรณี ซึ่งโดยปกติเมื่ออายุการใช้งานของดาวเทียมสิ้นสุดลง เพื่อลดการใช้เชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุดลง และเชื้อเพลิงที่เหลือจะถูกใช้สำหรับการแก้ไขวงโคจรตะวันตก-ตะวันออกเท่านั้น การสำรองเชื้อเพลิงเป็นปัจจัยหลักในการจำกัดอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
นับตั้งแต่การปล่อยดาวเทียมโลกเทียม (AES) ดวงแรกในปี 2500 ชีวิตมนุษย์เปลี่ยนแปลงไปอย่างมาก ความสำเร็จมากมาย ความก้าวหน้าทางเทคนิค(การสื่อสารผ่านดาวเทียมระหว่างประเทศ การพยากรณ์อากาศที่แม่นยำ อินเทอร์เน็ต) มนุษยชาติเป็นหนี้ดาวเทียมที่บินอยู่ในวงโคจรในอวกาศใกล้โลกอย่างแม่นยำ ทุกวันนี้ ดาวเทียมดังกล่าวทำงานได้อย่างสมบูรณ์ งานที่แตกต่างกัน, นับหมื่น. ขนาดมีตั้งแต่ใหญ่ (ประมาณ 100 เมตร) ไปจนถึงเล็กมาก (ไม่กี่เซนติเมตร) แต่ละคนมีหน้าที่ของตัวเองและมีวงโคจรของตัวเอง ดาวเทียมบินอยู่ในวงโคจรใด มีวงโคจรประเภทใดบ้างและมันคืออะไร?

ประวัติเล็กน้อย
ผู้คนสังเกตเห็นมานานแล้วว่าวัตถุในจักรวาลขนาดใหญ่ ไม่ว่าจะเป็นดาวหาง ดาวเคราะห์ หรือดวงดาว เคลื่อนที่ข้ามท้องฟ้า โดยรักษาช่วงระยะเวลาหนึ่งไว้ บรรดาผู้ที่อยากรู้อยากเห็นเป็นพิเศษได้บันทึกข้อสังเกตของพวกเขา ซึ่งทำให้คนรุ่นใหม่แต่ละคนมีความรู้เกี่ยวกับการเคลื่อนไหวในอวกาศมากขึ้นเรื่อยๆ
ตัวอย่างเช่น ขณะศึกษาผลงานของนักดาราศาสตร์ชาวเดนมาร์ก ไทโค บราเฮอ โยฮันเนส เคปเลอร์ นักดาราศาสตร์ชาวเยอรมันแห่งศตวรรษที่ 16 ได้ตั้งสมมติฐานว่าวัตถุในจักรวาลทั้งหมดเคลื่อนที่ตามกฎบางประการ โดยเฉพาะอย่างยิ่งเคปเลอร์แนะนำว่าดาวอังคาร (สำหรับดาวเคราะห์ดวงนี้ที่ Brahe สังเกตมาเป็นเวลานาน) จะไม่เคลื่อนที่รอบดวงอาทิตย์เป็นวงกลมเลย ในงานของเขา “New Astronomy Set forh in Researches on the Motion of the Star Mars” เคปเลอร์แสดงให้เห็นว่าดาวอังคารหมุนรอบดวงอาทิตย์เป็นรูปวงรี ต่อมา เคปเลอร์ได้กำหนดข้อสรุปเพิ่มเติมหลายประการ ซึ่งเขารวมเป็นสามคำจำกัดความ ปัจจุบันเรารู้จักคำจำกัดความเหล่านี้ (ปัจจุบันเรียกว่ากฎ) ในชื่อของเขา
เราจะไม่เข้าไปในประวัติศาสตร์โดยละเอียดทั้งหมด ยังดีกว่า เรามาดูกันว่ามนุษยชาติประสบความสำเร็จอะไรบ้าง และได้ข้อสรุปอะไรบ้างโดยใช้กฎของเคปเลอร์ เริ่มต้นด้วยการกำหนดวงโคจร
วงโคจรของดาวเทียมคืออะไร
จริงๆ แล้ว วงโคจรของดาวเทียมคือวิถีการเคลื่อนที่ของมัน การเคลื่อนที่ของวงโคจรเกิดขึ้นจากความเฉื่อย (โดยที่เครื่องยนต์ดับ) และในขณะเดียวกันดาวเทียม (อาจเป็นดาวเทียมเทียมหรือดาวเคราะห์ก็ได้) ก็ได้รับอิทธิพลจากแรงโน้มถ่วงเท่านั้น (แน่นอนว่าโลกเป็นหลัก) วงโคจรดาวเทียมพวกมันมีรูปร่างเป็นวงรีและเคลื่อนที่ไปตามระนาบจินตนาการที่ผ่านศูนย์กลางของโลก ระนาบนี้และด้วยเหตุนี้วงโคจรจึงไม่สมมาตร แต่ค่อนข้างยาว กล่าวคือ มันไม่คงที่ เปลี่ยนแปลงตลอดเวลา บางครั้งเพิ่มขึ้นและบางครั้งก็ลดลงตามวิถีโคจร ในแง่วิทยาศาสตร์ จุดสูงสุดของวงโคจร (ระยะทางสูงสุดจากโลก) เรียกว่า จุดสุดยอด และจุดต่ำสุด (ระยะทางขั้นต่ำจากโลก) เรียกว่า จุดเพอริจี ตั้งอยู่ตามลำดับในซีกโลกใต้และซีกโลกเหนือ
ตามกฎข้อที่สองของเคปเลอร์ ดาวเคราะห์ (ในกรณีของเราคือดาวเทียม) ที่กำลังเคลื่อนที่ในเครื่องบินจะผ่าน (อธิบาย) พื้นที่ที่เท่ากันในช่วงเวลาที่เท่ากัน จากนี้เราสามารถสรุปได้ว่าดาวเทียมเคลื่อนที่ไม่สม่ำเสมอ ยิ่งดาวเทียมอยู่ใกล้โลก (เพริจี) ยิ่งมีความเร็วเชิงเส้นสูง และยิ่งอยู่ห่างจากโลก (เอโปจี) ความเร็วก็ยิ่งต่ำลง ปรากฏการณ์นี้ทำให้นักวิทยาศาสตร์สามารถสันนิษฐานและคำนวณต่างๆ ได้ วงโคจรของดาวเทียมเหมาะสมที่สุดสำหรับวัตถุประสงค์เฉพาะ
วงโคจรคืออะไร?
ขึ้นอยู่กับความเร็วเริ่มต้นที่กำหนด ดาวเทียมที่ปล่อยสู่อวกาศจะมีวงโคจรที่แน่นอน (หรือวงแรกและวงโคจรอื่น) คุณสมบัติของวงโคจรของดาวเทียมทำให้สามารถเพิ่มประสิทธิภาพอุปกรณ์ส่งและรับเพื่อการปฏิบัติงานที่ได้รับมอบหมายให้เกิดประโยชน์สูงสุด วงโคจรจะแตกต่างกันไปตามความเอียง โดยขนาดของกึ่งแกนเอก (หรือความสูงเหนือพื้นผิวโลก) และโดยความเร็วของการหมุนรอบโลกของดาวเทียม ลองพิจารณาประเภทต่างๆ วงโคจรของดาวเทียมรายละเอียดเพิ่มเติม.
วงโคจรด้วยความโน้มเอียงที่กำหนด
การจำแนกประเภทนี้แสดงให้เห็นว่าวงโคจรมีความลาดเอียงแตกต่างกันอย่างไร ยิ่งมุมเอียงของวงโคจรมากเท่าไร ดาวเทียมก็จะยิ่งมองเห็นได้มากขึ้นที่ละติจูดเหนือ และยิ่งดาวเทียมสูงเท่าใด ขอบเขตการมองเห็นก็จะกว้างขึ้นเท่านั้น มีเส้นศูนย์สูตร (วงโคจรตามเส้นศูนย์สูตรของโลก) ขั้วโลก (วงโคจรตั้งฉากกับเส้นศูนย์สูตร) และวงโคจรซิงโครนัสของดวงอาทิตย์ วงโคจรหลังมักใช้เพื่อวางดาวเทียมสำหรับบันทึกภาพถ่ายและวิดีโอของพื้นผิวโลก
วงโคจรที่มีระดับความสูงต่างกัน (กึ่งแกนเอก)
ดาวเทียมที่ปล่อยนั้นเรียกว่าวงโคจรต่ำหรือวงโคจรกลางตามลำดับ ทั้งนี้ขึ้นอยู่กับความสูงของวงโคจร
ต่ำ ดาวเทียมวงโคจร บินเหนือพื้นผิวโลกที่ระดับความสูง 160 กิโลเมตรถึง 2,000 กิโลเมตร ชื่อที่พบมากที่สุดในวรรณกรรมทางวิทยาศาสตร์คือ LEO (จากวงโคจรโลกต่ำของอังกฤษ)
ดาวเทียมวงโคจรต่ำดังกล่าวมักใช้เพื่อการสื่อสารทางวิทยุโทรศัพท์ส่วนบุคคล สิ่งนี้อธิบายได้จากการสัมผัสขั้วกราวด์กับตัวทวนสัญญาณดาวเทียมอย่างต่อเนื่องตลอดจนพลังของการส่งและรับสัญญาณ อย่างไรก็ตาม แง่มุมนี้ถูกนำมาใช้ในสาขาโทรคมนาคมเมื่อไม่นานมานี้ ดังนั้นในประเทศที่มีโครงสร้างพื้นฐานที่พัฒนาแล้ว ส่วนแบ่งของบริการที่มีให้โดยเฉพาะ ดาวเทียมวงโคจรต่ำมีเพียงประมาณ 35% เท่านั้น ส่วนแบ่งหลักประกอบด้วยดาวเทียมที่บินอยู่ในวงโคจรค้างฟ้า
ดาวเทียมวงโคจรขนาดกลางเรียกว่าดาวเทียมที่บินอยู่เหนือพื้นผิวโลกที่ระดับความสูง 2,000 กิโลเมตรถึง 35,786 กิโลเมตร พวกมันถูกเรียกตามลำดับว่า MEO (จากภาษาอังกฤษว่า "Medium Earth Orbit")
ระดับความสูงของวงโคจรเหล่านี้ใช้โดยระบบนำทางทั่วโลก (GPS, GLONASS) ซึ่งค่อนข้างยุติธรรมเนื่องจากระดับความสูงที่กำหนดของดาวเทียมวงโคจรกลางช่วยให้การแลกเปลี่ยนข้อมูลกับเครื่องรับ (ระบบนำทาง) แม่นยำที่สุด
วงโคจรค้างฟ้า
การจำแนกประเภทนี้แสดงความเร็วของการปฏิวัติของดาวเทียมรอบโลกที่อยู่ในวงโคจรที่แน่นอน ความเร็ววงโคจรของดาวเทียมดังกล่าวคือ 23 ชั่วโมง 56 นาที และ 4.09 วินาที เป็นเรื่องง่ายที่จะเข้าใจว่าตัวเลขนี้เท่ากับวันทางโลก ด้วยเหตุนี้ ดาวเทียมในวงโคจรดังกล่าวจึงดูเหมือนจะ "ค้าง" บนท้องฟ้าในที่เดียว
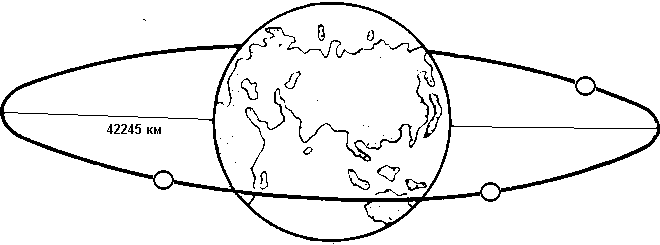 วงโคจรค้างฟ้าอยู่ห่างจากพื้นผิวโลก 35,786 กิโลเมตร วงโคจรผ่านไปในระนาบเส้นศูนย์สูตรของโลก รัศมีของมันคือ 42164 กิโลเมตร ซึ่งมากกว่ารัศมีของโลกของเราประมาณ 6 เท่า (6378 กิโลเมตร) พิกัดท้องฟ้าของดาวเทียมดังกล่าวในวงโคจรค้างฟ้าคงที่ ทำให้สามารถใช้งานได้ในการทำงาน โทรทัศน์ดาวเทียม- สัญญาณที่มาจากดาวเทียมดังกล่าวมีความชัดเจนและไม่สะดุด
วงโคจรค้างฟ้าอยู่ห่างจากพื้นผิวโลก 35,786 กิโลเมตร วงโคจรผ่านไปในระนาบเส้นศูนย์สูตรของโลก รัศมีของมันคือ 42164 กิโลเมตร ซึ่งมากกว่ารัศมีของโลกของเราประมาณ 6 เท่า (6378 กิโลเมตร) พิกัดท้องฟ้าของดาวเทียมดังกล่าวในวงโคจรค้างฟ้าคงที่ ทำให้สามารถใช้งานได้ในการทำงาน โทรทัศน์ดาวเทียม- สัญญาณที่มาจากดาวเทียมดังกล่าวมีความชัดเจนและไม่สะดุด
การรักษาจุดตำแหน่งให้คงที่ ("ติด" ในที่เดียว) นั้นไม่สมบูรณ์ เนื่องจากดาวเทียมได้รับอิทธิพลจากจุดที่ใกล้ที่สุดอยู่ตลอดเวลา ดาวเทียมธรรมชาติโลก-ดวงจันทร์. ดวงจันทร์ทำให้เกิดการรบกวนจากแรงโน้มถ่วงในวงโคจรของดาวเทียมและดึงมันเข้าหาตัวมันเอง ตำแหน่งของดาวเทียมจะถูกปรับโดยใช้เครื่องยนต์ที่ติดตั้งไว้
“คลาร์ก เบลท์”
เป็นครั้งแรกในประวัติศาสตร์ที่วิศวกรชาวอังกฤษ Arthur Clarke คำนวณวงโคจรค้างฟ้า สิ่งนี้เกิดขึ้นในปี พ.ศ. 2488 อันห่างไกลออกไปแล้ว คลาร์กเสนอให้ใช้วงโคจรนี้สำหรับดาวเทียมสื่อสาร ความคิดนี้ทำให้คลาร์กประหลาดใจและในไม่ช้าก็เป็นจริง! ระบบการสื่อสารทั่วโลกเกือบทั้งหมดเป็นหนี้การมีอยู่ของบุคคลนี้ ในความหมายที่กว้างกว่า ทุกคนที่ใช้อินเทอร์เน็ตในปัจจุบันเป็นหนี้ Arthur C. Clarke ที่ประเมินค่าไม่ได้ ในอังกฤษและประเทศอื่นๆ ส่วนใหญ่ โดยเฉพาะในยุโรป วงโคจรค้างฟ้าเรียกว่า "แถบคลาร์ก"
การนำดาวเทียมขึ้นสู่วงโคจร
ขั้นตอนการส่งดาวเทียมแล้วนำไปให้ ความสูงที่กำหนด(วงโคจร) คือชุดของการกระทำทางวิทยาศาสตร์และการปฏิบัติซึ่งมีพื้นฐานมาจากการคำนวณทางคณิตศาสตร์และกายภาพที่ชัดเจน การส่งดาวเทียมโดยตรงนั้นดำเนินการโดยจรวดหลายขั้นตอนโดยใช้วงโคจรระดับกลาง
มันมีไว้เพื่ออะไร
 การพิจารณาหัวข้อที่ซับซ้อนแต่น่าสนใจ เช่น การโคจรของดาวเทียม คำจำกัดความและการจำแนกวงโคจร และอื่นๆ ทำให้เกิดคำถามมากมายในเชิงตรรกะ สิ่งนี้มีประโยชน์อะไร? ทำไมคุณต้องรู้ทั้งหมดนี้?
การพิจารณาหัวข้อที่ซับซ้อนแต่น่าสนใจ เช่น การโคจรของดาวเทียม คำจำกัดความและการจำแนกวงโคจร และอื่นๆ ทำให้เกิดคำถามมากมายในเชิงตรรกะ สิ่งนี้มีประโยชน์อะไร? ทำไมคุณต้องรู้ทั้งหมดนี้?
ดังที่ได้กล่าวไปแล้วในตอนต้นของบทความเกี่ยวกับการถือกำเนิดของวงโคจร ดาวเทียมประดิษฐ์การสำรวจวงโคจรใกล้โลกโดยมนุษย์และโลก มีการเปลี่ยนแปลงไปมากในชีวิตของมนุษยชาติยุคใหม่ เช่น ต้นทุนเฉลี่ยของต่างประเทศ การสนทนาทางโทรศัพท์- มีโอกาสที่จะใช้ทรัพยากร ระบบทั่วโลก การนำทางด้วยดาวเทียม- พยากรณ์อากาศที่แม่นยำ การคำนวณการเปลี่ยนแปลงสภาพภูมิอากาศในบางภูมิภาคของโลก การพยากรณ์การเปลี่ยนแปลงทางภูมิศาสตร์และภูมิอากาศในระดับดาวเคราะห์ การสำรวจก้นทะเลและแหล่งสะสมแร่ การเข้าถึง เครือข่ายทั่วโลกอินเทอร์เน็ตได้ทุกที่บนโลก การสำรวจอวกาศ ทั้งหมดนี้เกิดขึ้นได้ด้วยการโคจรของดาวเทียม
น่าเสียดายที่ทุกวันนี้วงโคจรใกล้โลกมีความอิ่มตัวมากเกินไปด้วยปัจจัยต่างๆ” เศษอวกาศ- มีการประมาณกันว่าวัตถุบินมากกว่า 1,100 ชิ้นที่มีเส้นผ่านศูนย์กลางมากกว่าครึ่งเมตรนั้นอยู่ในบริเวณใกล้เคียงกับวงโคจรค้างฟ้าของโลก ซึ่งโดยทั่วไปเป็นเจ้าภาพ อุปกรณ์สื่อสาร- อย่างไรก็ตาม มีวัตถุเหล่านี้เพียง 300 ชิ้นเท่านั้นที่เป็นดาวเทียมปฏิบัติการ ในบรรดาวัตถุอันตรายที่ถูกทิ้งโดยไม่จำเป็นในอวกาศที่ระดับความสูงต่างกัน ได้แก่ เครื่องปฏิกรณ์นิวเคลียร์ 32 เครื่องที่เลิกใช้งานมานาน ทั้งหมดนี้พูดถึงความอกตัญญูของ "ผู้ใช้" แต่ละคนของวงโคจรที่มีต่อผู้ที่ครั้งหนึ่งเคยให้ความรู้อันล้ำค่าแก่เราเกี่ยวกับกฎการเคลื่อนที่ของวัตถุในจักรวาล
: 23 ชั่วโมง 56 นาที 4.091 วินาที)
แนวคิดในการใช้ดาวเทียมค้างฟ้าเพื่อการสื่อสารแสดงโดยนักทฤษฎีอวกาศชาวสโลวีเนีย Herman Potočnik ในปี 1928
ข้อดีของวงโคจร geostationary เป็นที่รู้จักอย่างกว้างขวางหลังจากการตีพิมพ์บทความวิทยาศาสตร์ยอดนิยมของ Arthur Clarke ในนิตยสาร Wireless World ในปี 1945 ดังนั้นในวงโคจร geostationary และ geosynchronous ตะวันตกบางครั้งจึงถูกเรียกว่า " วงโคจรของคลาร์ก", เอ" เข็มขัดของคลาร์ก" หมายถึง ขอบเขตของอวกาศรอบนอกที่ระยะทาง 36,000 กิโลเมตร เหนือระดับน้ำทะเลในระนาบของเส้นศูนย์สูตรของโลก โดยที่พารามิเตอร์การโคจรอยู่ใกล้กับการเคลื่อนที่ของแรงโน้มถ่วง ดาวเทียมดวงแรกที่ประสบความสำเร็จในการปล่อยเข้าสู่ GEO คือ ซินคอม-3เปิดตัวโดย NASA ในเดือนสิงหาคม พ.ศ. 2507
YouTube สารานุกรม
-
1 / 5
วงโคจรค้างฟ้าสามารถทำได้อย่างแม่นยำบนวงกลมที่อยู่เหนือเส้นศูนย์สูตรโดยตรงเท่านั้น โดยมีระดับความสูงใกล้เคียง 35,786 กม.
หากมองเห็นดาวเทียมค้างฟ้าบนท้องฟ้า ตาเปล่าจากนั้นเส้นที่มองเห็นได้จะตรงกับ "เข็มขัดคลาร์ก" สำหรับบริเวณนี้ ดาวเทียมค้างฟ้าซึ่งมีจุดยืนที่มีอยู่ทำให้ใช้งานได้สะดวก การสื่อสารผ่านดาวเทียม: เมื่อวางทิศทางแล้ว เสาอากาศจะชี้ไปที่ดาวเทียมที่เลือกไว้เสมอ (เว้นแต่จะเปลี่ยนตำแหน่ง)
ในการถ่ายโอนดาวเทียมจากวงโคจรระดับความสูงต่ำไปยังวงโคจร geostationary จะใช้วงโคจรถ่ายโอน geostationary (GTO) - วงโคจรรูปไข่ที่มี perigee ที่ระดับความสูงต่ำและ apogee ที่ระดับความสูงใกล้กับวงโคจร geostationary
หลังจากเสร็จสิ้นการดำเนินการกับเชื้อเพลิงที่เหลืออยู่ ดาวเทียมจะต้องถูกย้ายไปยังวงโคจรกำจัดซึ่งอยู่เหนือ GEO 200-300 กม.
การคำนวณพารามิเตอร์วงโคจรค้างฟ้า
รัศมีวงโคจรและความสูงของวงโคจร
ในวงโคจรค้างฟ้า ดาวเทียมจะไม่เข้าใกล้หรือเคลื่อนออกจากโลก และยิ่งไปกว่านั้น เมื่อหมุนไปพร้อมกับโลก ดาวเทียมจะอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรตลอดเวลา ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจึงต้องสร้างสมดุลซึ่งกันและกัน ในการคำนวณความสูงของวงโคจรค้างฟ้า คุณสามารถใช้วิธีกลศาสตร์คลาสสิก และดำเนินการจากสมการต่อไปนี้เมื่อย้ายไปยังกรอบอ้างอิงของดาวเทียม
F u = F Γ (\displaystyle F_(u)=F_(\Gamma )),ที่ไหน F u (\displaystyle F_(u))- แรงเฉื่อยและในกรณีนี้คือแรงเหวี่ยง F Γ (\displaystyle F_(\Gamma ))- แรงโน้มถ่วง. ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้ตามกฎแรงโน้มถ่วงสากลของนิวตัน:
F Γ = G ⋅ M 3 ⋅ m c R 2 (\รูปแบบการแสดงผล F_(\Gamma )=G\cdot (\frac (M_(3)\cdot m_(c))(R^(2)))),มวลของดาวเทียมอยู่ที่ไหน ม 3 (\รูปแบบการแสดงผล M_(3))- มวลของโลกเป็นกิโลกรัม G (\displaystyle G)คือค่าคงที่แรงโน้มถ่วง และ R (\รูปแบบการแสดงผล R)- ระยะทางเป็นเมตรจากดาวเทียมถึงใจกลางโลก หรือในกรณีนี้คือรัศมีของวงโคจร
ขนาดของแรงเหวี่ยงหนีศูนย์เท่ากับ:
F u = m c ⋅ a (\displaystyle F_(u)=m_(c)\cdot a),ที่ไหน ก (\displaystyle ก)- ความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
อย่างที่คุณเห็นมวลของดาวเทียม ม. ค (\displaystyle m_(c))ปรากฏเป็นตัวคูณในนิพจน์สำหรับแรงเหวี่ยงหนีศูนย์และแรงโน้มถ่วง กล่าวคือ ระดับความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียมซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลจากความเท่าเทียมกันของ มวลความโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรค้างฟ้าจะถูกกำหนดโดยระดับความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะมีขนาดเท่ากันและตรงกันข้ามในทิศทางกับแรงโน้มถ่วงที่สร้างขึ้นโดยแรงโน้มถ่วงของโลกที่ระดับความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางเท่ากับ:
a = ω 2 ⋅ R (\displaystyle a=\omega ^(2)\cdot R),โดยที่ความเร็วเชิงมุมของการหมุนของดาวเทียมคือเรเดียนต่อวินาที
มาทำความเข้าใจประเด็นสำคัญกัน ในความเป็นจริง ความเร่งสู่ศูนย์กลางมีความหมายทางกายภาพเฉพาะในกรอบอ้างอิงเฉื่อยเท่านั้น ในขณะที่แรงหนีศูนย์กลางเป็นสิ่งที่เรียกว่าแรงในจินตนาการ และเกิดขึ้นเฉพาะในกรอบอ้างอิง (พิกัด) ที่เกี่ยวข้องกับวัตถุที่หมุนอยู่ แรงสู่ศูนย์กลาง (ในกรณีนี้คือ แรงโน้มถ่วง) ทำให้เกิดการเร่งความเร็วสู่ศูนย์กลาง ในค่าสัมบูรณ์ ความเร่งสู่ศูนย์กลางในกรอบอ้างอิงเฉื่อยจะเท่ากับความเร่งสู่ศูนย์กลางในหน้าต่างอ้างอิงที่เกี่ยวข้องในกรณีของเรากับดาวเทียม ดังนั้น เมื่อคำนึงถึงข้อสังเกตที่ตั้งไว้แล้ว เราจึงสามารถใช้คำว่า "ความเร่งสู่ศูนย์กลาง" ร่วมกับคำว่า "แรงเหวี่ยง" ได้
เราได้รับสมการนิพจน์สำหรับแรงโน้มถ่วงและแรงเหวี่ยงด้วยการแทนที่ความเร่งสู่ศูนย์กลาง:
m c ⋅ ω 2 ⋅ R = G ⋅ M 3 ⋅ m c R 2 (\displaystyle m_(c)\cdot \omega ^(2)\cdot R=G\cdot (\frac (M_(3)\cdot m_(c) ))(ร^(2)))).กำลังลด ม. ค (\displaystyle m_(c)), กำลังแปล R 2 (\รูปแบบการแสดงผล R^(2))ไปทางซ้ายและ ω 2 (\displaystyle \โอเมก้า ^(2))ทางด้านขวาเราจะได้:
R 3 = G ⋅ M 3 ω 2 (\displaystyle R^(3)=G\cdot (\frac (M_(3))(\omega ^(2)))) R = G ⋅ M 3 ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (G\cdot M_(3))(\omega ^(2))))).นิพจน์นี้สามารถเขียนให้แตกต่างออกไปได้โดยการแทนที่ G ⋅ M 3 (\displaystyle G\cdot M_(3))บน μ (\displaystyle \mu )- ค่าคงที่แรงโน้มถ่วงศูนย์กลางโลก:
R = μ ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (\mu )(\omega ^(2)))))ความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )คำนวณโดยการหารมุมที่เคลื่อนที่ในหนึ่งรอบ ( 360 ∘ = 2 ⋅ π (\displaystyle 360^(\circ )=2\cdot \pi )เรเดียน) สำหรับคาบการโคจร (เวลาที่ใช้ในการหมุนรอบวงโคจรครบหนึ่งรอบ: วันดาวฤกษ์หนึ่งวัน หรือ 86,164 วินาที) เราได้รับ:
ω = 2 ⋅ π 86164 = 7 , 29 ⋅ 10 − 5 (\displaystyle \omega =(\frac (2\cdot \pi )(86164))=7.29\cdot 10^(-5)) ราด/เอสรัศมีวงโคจรที่ได้คือ 42,164 กม. เมื่อลบรัศมีเส้นศูนย์สูตรของโลกออกไป 6,378 กม. เราจะได้ระดับความสูง 35,786 กม.
คุณสามารถคำนวณด้วยวิธีอื่นได้ ระดับความสูงของวงโคจรค้างฟ้าคือระยะห่างจากจุดศูนย์กลางของโลก โดยที่ความเร็วเชิงมุมของดาวเทียมซึ่งสอดคล้องกับความเร็วเชิงมุมของการหมุนของโลก ทำให้เกิดความเร็วของวงโคจร (เชิงเส้น) เท่ากับความเร็วจักรวาลแรก (เพื่อให้แน่ใจว่า วงโคจรเป็นวงกลม) ที่ระดับความสูงที่กำหนด
ความเร็วเชิงเส้นของดาวเทียมที่เคลื่อนที่ด้วยความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )ในระยะทาง R (\รูปแบบการแสดงผล R)จากจุดศูนย์กลางการหมุนเท่ากับ
v l = ω ⋅ R (\displaystyle v_(l)=\omega \cdot R)อันดับแรก ความเร็วหลบหนีในระยะทาง R (\รูปแบบการแสดงผล R)จากวัตถุที่มีมวล M (\displaystyle M)เท่ากับ
v k = G M R ; (\displaystyle v_(k)=(\sqrt (G(\frac (M)(R))));)เมื่อเท่ากันทางด้านขวาของสมการเราจะได้นิพจน์ที่ได้รับก่อนหน้านี้ รัศมีหน่วยงานภาครัฐ:
R = G M ω 2 3 (\รูปแบบการแสดงผล R=(\sqrt[(3)](G(\frac (M)(\omega ^(2))))))ความเร็ววงโคจร
ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีของวงโคจร:
v = ω ⋅ R = 3.07 (\displaystyle v=\omega \cdot R=3.07) กม./วินาทีซึ่งน้อยกว่าความเร็วจักรวาลแรกที่ 8 กม./วินาที ในวงโคจรโลกต่ำประมาณ 2.5 เท่า (โดยมีรัศมี 6,400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรวงกลมนั้นมีสัดส่วนผกผันกับรัศมี
โวลต์ = G M R ; (\displaystyle v=(\sqrt (G(\frac (M)(R))));)จากนั้นความเร็วที่ลดลงเมื่อเทียบกับความเร็วจักรวาลแรกนั้นทำได้โดยการเพิ่มรัศมีวงโคจรมากกว่า 6 เท่า
R ۞ 6400 ∗ (8 3 , 07) 2 ۞ 43000 (\รูปแบบการแสดงผล R\ประมาณ \,\!(6400*((\frac (8)(3.07)))^(2))\ประมาณ \,\ !43000 )ความยาววงโคจร
ความยาววงโคจรค้างฟ้า: 2 ⋅ π ⋅ R (\รูปแบบการแสดงผล (2\cdot \pi \cdot R))- ด้วยรัศมีวงโคจร 42,164 กม. เราจะได้ความยาววงโคจร 264,924 กม.
ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "จุดยืน" ของดาวเทียม
การรักษาดาวเทียมให้อยู่ในตำแหน่งวงโคจรในวงโคจรค้างฟ้า
ดาวเทียมที่โคจรอยู่ในวงโคจรค้างฟ้าอยู่ภายใต้อิทธิพลของแรงจำนวนหนึ่ง (การรบกวน) ที่เปลี่ยนแปลงพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่งการรบกวนดังกล่าว ได้แก่ การรบกวนจากแรงโน้มถ่วงของดวงจันทร์-ดวงอาทิตย์ อิทธิพลของความไม่สอดคล้องกันของสนามโน้มถ่วงของโลก วงรีของเส้นศูนย์สูตร เป็นต้น การเสื่อมถอยของวงโคจรแสดงออกมาในปรากฏการณ์หลักสองประการ:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งวงโคจรเดิมไปยังจุดใดจุดหนึ่งของจุดสมดุลเสถียรที่เรียกว่า “หลุมวงโคจรค้างฟ้าที่อาจเกิดขึ้น” (ลองจิจูดอยู่ที่ 75.3°E, 104.7°W, 165.3°E และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก
2) ความเอียงของวงโคจรถึงเส้นศูนย์สูตรจะเพิ่มขึ้น (จากจุดเริ่มต้น 0) ในอัตราประมาณ 0.85 องศาต่อปี และถึงค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยการรบกวนเหล่านี้และรักษาดาวเทียมให้อยู่ในจุดที่หยุดนิ่งที่กำหนด ดาวเทียมจึงติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) ด้วยการเปิดเครื่องยนต์แรงขับต่ำเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความโน้มเอียงของวงโคจรที่เพิ่มขึ้น และ "ตะวันตก-ตะวันออก" เพื่อชดเชยการเคลื่อนตัวไปตามวงโคจร) ดาวเทียมจะถูกเก็บไว้ที่จุดหยุดนิ่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งทุกๆ สองสาม (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขแนวเหนือ-ใต้ต้องการความเร็วลักษณะเฉพาะเพิ่มขึ้นอย่างมาก (ประมาณ 45-50 เมตร/วินาทีต่อปี) มากกว่าการแก้ไขตามยาว (ประมาณ 2 เมตร/วินาทีต่อปี) เพื่อให้แน่ใจว่าการแก้ไขวงโคจรของดาวเทียมตลอดอายุการใช้งาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจ่ายเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีที่ใช้เครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีการจ่ายเชื้อเพลิงแทนที่ (ชาร์จก๊าซฮีเลียม) และทำงานบนส่วนประกอบที่มีจุดเดือดสูงซึ่งมีอายุการใช้งานยาวนาน (โดยปกติคือไดเมทิลไฮดราซีนและไดไนโตรเจนเตตรอกไซด์ที่ไม่สมมาตร) ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องยนต์พลาสมา แรงขับของพวกมันน้อยกว่าสารเคมีอย่างมาก แต่ประสิทธิภาพที่สูงกว่าช่วยให้ (เนื่องจากการทำงานระยะยาวซึ่งวัดได้ในเวลาสิบนาทีสำหรับการซ้อมรบครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเรืออย่างรุนแรง การเลือกประเภทของระบบขับเคลื่อนจะขึ้นอยู่กับคุณสมบัติทางเทคนิคเฉพาะของอุปกรณ์
หากจำเป็น จะใช้ระบบขับเคลื่อนเดียวกันนี้เพื่อเคลื่อนย้ายดาวเทียมไปยังตำแหน่งอื่นในวงโคจร ในบางกรณี - โดยปกติเมื่ออายุการใช้งานของดาวเทียมสิ้นสุดลง เพื่อลดการใช้เชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุดลง และเชื้อเพลิงที่เหลือจะถูกใช้สำหรับการแก้ไขวงโคจรตะวันตก-ตะวันออกเท่านั้น
การสำรองเชื้อเพลิงเป็นปัจจัยหลักในการจำกัดอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
ข้อเสียของวงโคจรค้างฟ้า
สัญญาณล่าช้า
การสื่อสารผ่านดาวเทียมค้างฟ้ามีลักษณะดังนี้ ความล่าช้าเป็นเวลานานในการกระจายสัญญาณ ด้วยระดับความสูงของวงโคจร 35,786 กม. และความเร็วแสงประมาณ 300,000 กม./วินาที การเดินทางของลำแสงโลก-ดาวเทียมใช้เวลาประมาณ 0.12 วินาที เส้นทางลำแสง “โลก (ตัวส่งสัญญาณ) → ดาวเทียม → โลก (ตัวรับ)” µs.0.24 วิ เวลาแฝงทั้งหมด (วัดโดยยูทิลิตี้ Ping) เมื่อใช้การสื่อสารผ่านดาวเทียมเพื่อรับและส่งข้อมูลจะอยู่ที่เกือบครึ่งวินาที โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียมในอุปกรณ์และใน ระบบเคเบิลการส่งสัญญาณบริการภาคพื้นดินความล่าช้าของสัญญาณทั้งหมดบนเส้นทาง "แหล่งสัญญาณ → ดาวเทียม → เครื่องรับ" สามารถเข้าถึงได้ 2-4 วินาที ความล่าช้านี้ทำให้ยากต่อการใช้ดาวเทียม GSO ในระบบโทรศัพท์ และทำให้ไม่สามารถใช้การสื่อสารผ่านดาวเทียมโดยใช้ GSO ในบริการเรียลไทม์ต่างๆ (เช่น ในเกมออนไลน์)
การมองไม่เห็นของ GSO จากละติจูดสูง
เนื่องจากไม่สามารถมองเห็นวงโคจรค้างฟ้าได้จากละติจูดสูง (จากประมาณ 81° ถึงขั้วโลก) และที่ละติจูดเหนือ 75° จะสังเกตเห็นได้ต่ำมากเหนือขอบฟ้า (ในสภาวะจริง ดาวเทียมจะถูกซ่อนไว้โดยวัตถุและภูมิประเทศที่ยื่นออกมา) และ มองเห็นเพียงส่วนเล็กๆ ของวงโคจร ( ดูตาราง) ดังนั้นการสื่อสารและการแพร่ภาพโทรทัศน์โดยใช้ GSO จึงเป็นไปไม่ได้ในภูมิภาคละติจูดสูงของ Far North (อาร์กติก) และแอนตาร์กติกา ตัวอย่างเช่น นักสำรวจขั้วโลกชาวอเมริกันที่สถานีอามุนด์เซน-สกอตต์ใช้สายเคเบิลใยแก้วนำแสงยาว 1,670 กิโลเมตรเพื่อสื่อสารกับโลกภายนอก (โทรศัพท์ อินเทอร์เน็ต) ไปยังตำแหน่งที่ตั้งอยู่ที่ 75° S สถานีคอนคอร์เดียของฝรั่งเศส ซึ่งมีดาวเทียมค้างฟ้าของอเมริกาหลายดวงที่มองเห็นได้แล้ว (~60°) ส่วนที่มองเห็นได้ของวงโคจร (และจำนวนดาวเทียมที่ได้รับด้วย) เท่ากับ 84% ของค่าสูงสุดที่เป็นไปได้ (เปิดและส่งสัญญาณ ดาวเทียมอยู่ในแนวเดียวกับเสาอากาศรับสัญญาณ (ตำแหน่ง "ดวงอาทิตย์" ด้านหลังดาวเทียม") ปรากฏการณ์นี้ยังเกิดขึ้นในวงโคจรอื่น แต่จะอยู่ในวงโคจรค้างฟ้า เมื่อดาวเทียม "หยุดนิ่ง" บนท้องฟ้า การรบกวนจากแสงอาทิตย์ ปรากฏชัดเจนโดยเฉพาะในละติจูดกลางของซีกโลกเหนือในช่วงตั้งแต่วันที่ 22 กุมภาพันธ์ถึง 11 มีนาคม และตั้งแต่วันที่ 3 ถึง 21 ตุลาคม โดยมีระยะเวลาสูงสุดไม่เกินสิบนาที .
การอ้างสิทธิ์ของรัฐเส้นศูนย์สูตรเหล่านี้ถูกปฏิเสธซึ่งตรงกันข้ามกับหลักการไม่จัดสรรพื้นที่รอบนอก ข้อความดังกล่าวได้รับการวิพากษ์วิจารณ์อย่างสมเหตุสมผลจากคณะกรรมการสหประชาชาติด้านอวกาศ ประการแรก ไม่มีใครสามารถอ้างสิทธิ์ในการจัดสรรอาณาเขตหรือพื้นที่ใดๆ ที่อยู่ห่างจากอาณาเขตของรัฐที่เกี่ยวข้องได้อย่างมีนัยสำคัญ ประการที่สอง พื้นที่รอบนอกไม่อยู่ภายใต้การจัดสรรของชาติ ประการที่สาม เป็นการไร้ความสามารถทางเทคนิคที่จะพูดคุยเกี่ยวกับความสัมพันธ์ทางกายภาพระหว่างอาณาเขตของรัฐกับพื้นที่ห่างไกลดังกล่าว ในที่สุด ในแต่ละกรณี ปรากฏการณ์ของดาวเทียมค้างฟ้าจะสัมพันธ์กับวัตถุอวกาศเฉพาะ หากไม่มีดาวเทียมก็ไม่มีวงโคจรค้างฟ้า