ประเภทของวงโคจรของโลก ประเภทของวงโคจรดาวเทียมและคำจำกัดความ
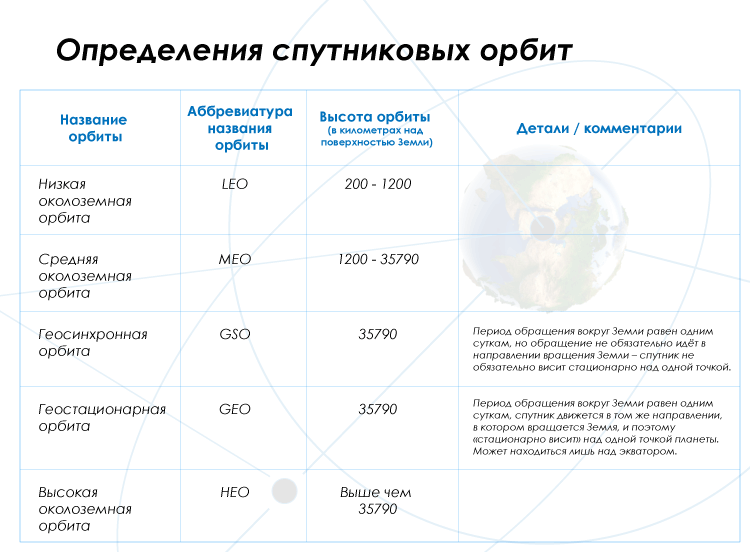
ปัจจุบัน มนุษยชาติใช้วงโคจรที่แตกต่างกันหลายวงเพื่อวางดาวเทียม ความสนใจที่ยิ่งใหญ่ที่สุดคือมุ่งเน้นไปที่วงโคจรค้างฟ้า ซึ่งสามารถใช้เพื่อ "นิ่ง" เพื่อวางดาวเทียมเหนือจุดใดจุดหนึ่งบนโลก วงโคจรที่เลือกให้ดาวเทียมทำงานขึ้นอยู่กับวัตถุประสงค์ ตัวอย่างเช่น ดาวเทียมที่ใช้ในการออกอากาศรายการสดทางโทรทัศน์จะอยู่ในวงโคจรค้างฟ้า ดาวเทียมสื่อสารจำนวนมากก็อยู่ในวงโคจรค้างฟ้าเช่นกัน อื่น ระบบดาวเทียมโดยเฉพาะที่ใช้เพื่อการสื่อสารระหว่าง โทรศัพท์ผ่านดาวเทียม, หมุนต่ำ วงโคจรโลกต่ำ- ในทำนองเดียวกัน ระบบดาวเทียมที่ใช้สำหรับระบบนำทาง เช่น Navstar หรือ Global Positioning System (GPS) ก็อยู่ในวงโคจรโลกที่ค่อนข้างต่ำเช่นกัน มีดาวเทียมอื่นๆ อีกนับไม่ถ้วน เช่น อุตุนิยมวิทยา การวิจัย และอื่นๆ และแต่ละคนนั้นขึ้นอยู่กับจุดประสงค์ของมันจะได้รับ "การลงทะเบียน" ในวงโคจรที่แน่นอน
อ่านเพิ่มเติม:
วงโคจรเฉพาะที่เลือกสำหรับการปฏิบัติการของดาวเทียมขึ้นอยู่กับหลายปัจจัย รวมถึงการทำงานของดาวเทียม ตลอดจนอาณาเขตที่ดาวเทียมให้บริการ ในบางกรณีอาจอยู่ในวงโคจรโลกต่ำมาก (LEO) ซึ่งอยู่ที่ระดับความสูงเพียง 160 กิโลเมตรเหนือพื้นโลก ในกรณีอื่นๆ ดาวเทียมจะอยู่ที่ระดับความสูงมากกว่า 36,000 กิโลเมตร เหนือพื้นโลก กล่าวคือ ในวงโคจรค้างฟ้า GEO นอกจากนี้ ดาวเทียมจำนวนหนึ่งไม่ได้ใช้วงโคจรเป็นวงกลม แต่เป็นวงรี
แรงโน้มถ่วงของโลกและ วงโคจรของดาวเทียม
ขณะที่ดาวเทียมโคจรรอบโลก พวกมันจะค่อยๆ เคลื่อนตัวออกห่างจากมันเนื่องจากแรงดึงดูดของโลก หากดาวเทียมไม่หมุนในวงโคจร พวกมันก็จะค่อยๆ ตกลงสู่พื้นโลกและเผาไหม้ในชั้นบรรยากาศชั้นบน อย่างไรก็ตาม การหมุนรอบตัวเองของดาวเทียมรอบโลกทำให้เกิดแรงผลักพวกมันออกจากโลกของเรา สำหรับแต่ละวงโคจรจะมีความเร็วในการออกแบบของตัวเอง ซึ่งช่วยให้คุณปรับสมดุลแรงโน้มถ่วงของโลกและแรงเหวี่ยง ทำให้อุปกรณ์อยู่ในวงโคจรคงที่ และป้องกันไม่ให้อุปกรณ์ขึ้นหรือสูญเสียระดับความสูง
เห็นได้ชัดว่ายิ่งวงโคจรของดาวเทียมต่ำลง แรงดึงดูดของโลกก็จะยิ่งมีอิทธิพลมากขึ้น และความเร็วที่จำเป็นในการเอาชนะแรงนี้ก็จะยิ่งมากขึ้นเท่านั้น ยิ่งระยะห่างจากพื้นผิวโลกถึงดาวเทียมมากเท่าใด ความเร็วก็จะน้อยลงตามลำดับเพื่อให้อยู่ในวงโคจรคงที่ ดาวเทียมที่โคจรอยู่เหนือพื้นผิวโลกประมาณ 160 กิโลเมตร ต้องใช้ความเร็วประมาณ 28,164 กิโลเมตรต่อชั่วโมง ซึ่งหมายความว่าจะใช้เวลาประมาณ 90 นาทีในการโคจรรอบโลก ที่ระยะห่าง 36,000 กม. เหนือพื้นผิวโลก ดาวเทียมต้องการความเร็วไม่เกิน 11,266 กม./ชม. เพื่อให้อยู่ในวงโคจรคงที่ ซึ่งช่วยให้ดาวเทียมดังกล่าวโคจรรอบโลกได้ในเวลาประมาณ 24 ชั่วโมง
คำจำกัดความของวงโคจรทรงกลมและวงรี
ดาวเทียมทุกดวงโคจรรอบโลกโดยใช้หนึ่งในสองดวง ประเภทพื้นฐานวงโคจร
- วงโคจรดาวเทียมแบบวงกลม: เมื่อโคจรอยู่ ยานอวกาศเมื่อโคจรรอบโลกเป็นวงกลม ระยะห่างเหนือพื้นผิวโลกจะยังคงเท่าเดิมเสมอ
- วงโคจรดาวเทียมทรงรี: การหมุนของดาวเทียมในวงโคจรทรงรีหมายถึงระยะห่างจากพื้นผิวโลกเปลี่ยนแปลงไปในเวลาที่ต่างกันระหว่างวงโคจรหนึ่งวง
อ่านเพิ่มเติม:
วงโคจรดาวเทียม
มีคำจำกัดความที่แตกต่างกันมากมายที่เกี่ยวข้องกับ ประเภทต่างๆวงโคจรของดาวเทียม:
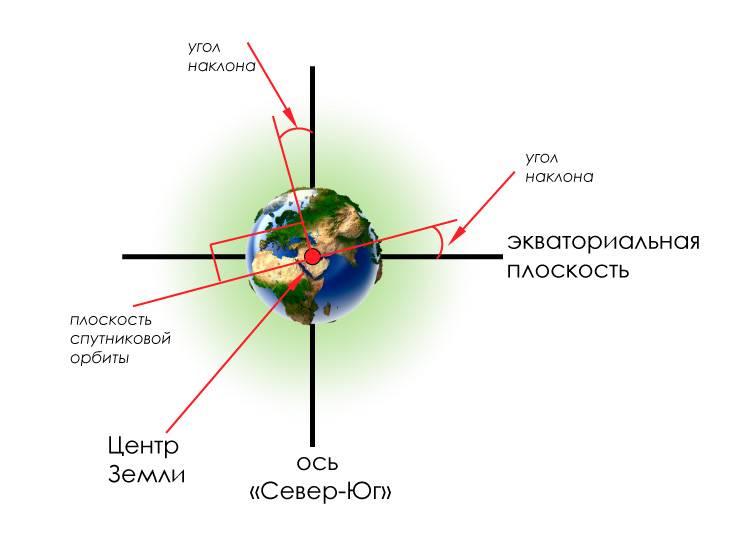
- ศูนย์กลางของโลก: เมื่อดาวเทียมโคจรรอบโลก - ในวงโคจรเป็นวงกลมหรือวงรี - วงโคจรของดาวเทียมจะก่อตัวเป็นระนาบที่ผ่านจุดศูนย์ถ่วงหรือจุดศูนย์กลางของโลก
- ทิศทางการเคลื่อนที่รอบโลก: วิธีที่ดาวเทียมโคจรรอบโลกของเราสามารถแบ่งออกเป็นสองประเภทตามทิศทางของวงโคจรนี้:
1. วงโคจรความเร่ง:
การปฏิวัติของดาวเทียมรอบโลกเรียกว่าความเร่งหากดาวเทียมหมุนไปในทิศทางเดียวกับที่โลกหมุน
2. วงโคจรถอยหลังเข้าคลอง:
การปฏิวัติของดาวเทียมรอบโลกเรียกว่าการถอยหลังเข้าคลองหากดาวเทียมหมุนไปในทิศทาง ทิศทางตรงกันข้ามการหมุนของโลก
- เส้นทางวงโคจร:เส้นทางการโคจรของดาวเทียมคือจุดหนึ่งบนพื้นผิวโลกที่ดาวเทียมเคลื่อนผ่านเหนือศีรษะโดยตรงขณะโคจรรอบโลก เส้นทางนี้ก่อตัวเป็นวงกลม โดยตรงกลางคือศูนย์กลางของโลก ควรสังเกตว่าดาวเทียมค้างฟ้าเป็นกรณีพิเศษเนื่องจากดาวเทียมเหล่านั้นยังคงอยู่ในจุดเดิมเหนือพื้นผิวโลกอย่างต่อเนื่อง ซึ่งหมายความว่าเส้นทางการโคจรของพวกมันประกอบด้วยจุดเดียวซึ่งอยู่ที่เส้นศูนย์สูตรของโลก นอกจากนี้เรายังสามารถเพิ่มได้ว่าเส้นทางการโคจรของดาวเทียมที่หมุนอยู่เหนือเส้นศูนย์สูตรอย่างเคร่งครัดทอดยาวไปตามเส้นศูนย์สูตรนี้
โดยทั่วไปแล้ว วงโคจรเหล่านี้มีลักษณะเฉพาะด้วยการเคลื่อนตัวไปทางทิศตะวันตกในเส้นทางการโคจรของดาวเทียมแต่ละดวงเมื่อโลกใต้ดาวเทียมหมุนไปทางทิศตะวันออก
- โหนดวงโคจร: นี่คือจุดที่เส้นทางการโคจรผ่านจากซีกโลกหนึ่งไปอีกซีกโลกหนึ่ง สำหรับวงโคจรที่ไม่ใช่เส้นศูนย์สูตรจะมีโหนดดังกล่าวสองจุด:
1. โหนดจากน้อยไปมาก:
นี่คือโหนดที่เส้นทางการโคจรเปลี่ยนจากซีกโลกใต้ไปทางเหนือ
2. โหนดจากมากไปน้อย:
นี่คือโหนดที่เส้นทางการโคจรเปลี่ยนจากซีกโลกเหนือไปซีกโลกใต้
- ความสูงของดาวเทียม: เมื่อคำนวณวงโคจรหลายๆ รอบ จำเป็นต้องคำนึงถึงความสูงของดาวเทียมเหนือศูนย์กลางโลกด้วย ตัวบ่งชี้นี้รวมถึงระยะทางจากดาวเทียมถึงพื้นผิวโลกบวกกับรัศมีของดาวเคราะห์ของเรา ตามกฎแล้วจะถือว่าเท่ากับ 6,370 กิโลเมตร
- ความเร็ววงโคจร: สำหรับวงโคจรเป็นวงกลมก็จะเหมือนกันเสมอ อย่างไรก็ตาม ในกรณีของวงโคจรทรงรี ทุกอย่างจะแตกต่างออกไป ความเร็วของวงโคจรของดาวเทียมจะเปลี่ยนไปขึ้นอยู่กับตำแหน่งในวงโคจรเดียวกันนี้ จะถึงจุดสูงสุดเมื่ออยู่ใกล้โลกมากที่สุด โดยที่ดาวเทียมต้องเผชิญกับแรงต้านสูงสุดต่อแรงโน้มถ่วงของดาวเคราะห์ และจะลดลงเหลือน้อยที่สุดเมื่อถึงจุดที่อยู่ห่างจากโลกมากที่สุด
- มุมยก: มุมเงยของดาวเทียมคือมุมที่ดาวเทียมตั้งอยู่เหนือขอบฟ้า หากมุมเล็กเกินไป สัญญาณอาจถูกบล็อกโดยวัตถุใกล้เคียงหากเสาอากาศรับสัญญาณไม่ยกสูงเพียงพอ อย่างไรก็ตาม สำหรับเสาอากาศที่ยกขึ้นเหนือสิ่งกีดขวาง ก็ประสบปัญหาในการรับสัญญาณจากดาวเทียมที่มีมุมเงยต่ำเช่นกัน เหตุผลก็คือ สัญญาณดาวเทียมจะต้องเดินทางเป็นระยะทางที่ไกลกว่าผ่านชั้นบรรยากาศของโลก และผลก็คือ อาจมีการลดทอนสัญญาณมากขึ้น มุมเงยขั้นต่ำที่ยอมรับได้สำหรับการรับสัญญาณที่น่าพอใจมากหรือน้อยถือเป็นมุมห้าองศา
- มุมเอียง: วงโคจรดาวเทียมบางวงไม่ได้เป็นไปตามเส้นศูนย์สูตร ที่จริงแล้ว วงโคจรโลกต่ำส่วนใหญ่ไม่เป็นไปตามเส้นนี้ ดังนั้นจึงจำเป็นต้องกำหนดมุมเอียงของวงโคจรของดาวเทียม แผนภาพด้านล่างแสดงให้เห็นถึงกระบวนการนี้
 มุมเอียงของวงโคจรดาวเทียม
มุมเอียงของวงโคจรดาวเทียม ตัวชี้วัดอื่นๆ ที่เกี่ยวข้องกับวงโคจรของดาวเทียม
เพื่อที่จะใช้ดาวเทียมในการให้บริการการสื่อสาร สถานีภาคพื้นดินจะต้องสามารถ "ติดตาม" เพื่อรับสัญญาณจากดาวเทียมและส่งสัญญาณไปยังดาวเทียมได้ เป็นที่ชัดเจนว่าการสื่อสารกับดาวเทียมสามารถทำได้เฉพาะในขณะที่อยู่ในช่วงการมองเห็นของสถานีภาคพื้นดินเท่านั้น และสามารถอยู่ในช่วงการมองเห็นในช่วงเวลาสั้น ๆ เท่านั้น ทั้งนี้ขึ้นอยู่กับประเภทของวงโคจร เพื่อให้แน่ใจว่าการสื่อสารกับดาวเทียมเป็นไปได้ในระยะเวลาสูงสุด มีหลายตัวเลือกที่สามารถใช้ได้:
- ตัวเลือกแรกประกอบด้วยการใช้วงโคจรทรงรีซึ่งจุดสุดยอดซึ่งอยู่เหนือตำแหน่งที่วางแผนไว้ของสถานีภาคพื้นดินพอดี ซึ่งช่วยให้ดาวเทียมคงอยู่ในช่วงการมองเห็นของสถานีนี้เป็นระยะเวลาสูงสุด
- ตัวเลือกที่สองประกอบด้วยการปล่อยดาวเทียมหลายดวงเข้าสู่วงโคจรเดียว และเมื่อหนึ่งในนั้นหายไปจากการมองเห็นและการสื่อสารกับดาวเทียมนั้นหายไป ก็มีอีกดวงหนึ่งเข้ามาแทนที่ ตามกฎแล้ว เพื่อจัดระเบียบการสื่อสารอย่างต่อเนื่องไม่มากก็น้อยนั้นจำเป็นต้องส่งดาวเทียมสามดวงขึ้นสู่วงโคจร อย่างไรก็ตาม กระบวนการเปลี่ยนดาวเทียม "หน้าที่" หนึ่งดวงด้วยอีกดวงหนึ่งทำให้เกิดความซับซ้อนเพิ่มเติมในระบบ เช่นเดียวกับข้อกำหนดหลายประการสำหรับดาวเทียมอย่างน้อยสามดวง
คำจำกัดความของวงโคจรเป็นวงกลม
วงโคจรแบบวงกลมสามารถจำแนกได้ตามพารามิเตอร์หลายตัว คำศัพท์ต่างๆ เช่น วงโคจรโลกต่ำ วงโคจรค้างฟ้า (และอื่นๆ ที่คล้ายคลึงกัน) บ่งบอกถึงคุณลักษณะเฉพาะของวงโคจรเฉพาะ ภาพรวมโดยย่อคำจำกัดความของวงโคจรเป็นวงกลมแสดงไว้ในตารางด้านล่าง
: 23 ชั่วโมง 56 นาที 4.091 วินาที)
แนวคิดในการใช้ดาวเทียมค้างฟ้าเพื่อการสื่อสารแสดงโดยนักทฤษฎีอวกาศชาวสโลวีเนีย Herman Potočnik ในปี 1928
ข้อดีของวงโคจร geostationary เป็นที่รู้จักอย่างกว้างขวางหลังจากการตีพิมพ์บทความวิทยาศาสตร์ยอดนิยมของ Arthur Clarke ในนิตยสาร Wireless World ในปี 1945 ดังนั้นในวงโคจร geostationary และ geosynchronous ตะวันตกบางครั้งจึงถูกเรียกว่า " วงโคจรของคลาร์ก", เอ" เข็มขัดของคลาร์ก" หมายถึง ขอบเขตของอวกาศรอบนอกที่ระยะทาง 36,000 กิโลเมตร เหนือระดับน้ำทะเลในระนาบของเส้นศูนย์สูตรของโลก โดยที่พารามิเตอร์การโคจรอยู่ใกล้กับการเคลื่อนที่ของแรงโน้มถ่วง ดาวเทียมดวงแรกที่ประสบความสำเร็จในการปล่อยสู่ GEO คือ ซินคอม-3เปิดตัวโดย NASA ในเดือนสิงหาคม พ.ศ. 2507
YouTube สารานุกรม
-
1 / 5
วงโคจรค้างฟ้าสามารถทำได้อย่างแม่นยำบนวงกลมที่อยู่เหนือเส้นศูนย์สูตรโดยตรงเท่านั้น โดยมีระดับความสูงใกล้เคียง 35,786 กม.
หากมองเห็นดาวเทียมค้างฟ้าบนท้องฟ้า ตาเปล่าจากนั้นเส้นที่มองเห็นได้จะตรงกับ "เข็มขัดคลาร์ก" สำหรับบริเวณนี้ ดาวเทียมค้างฟ้าซึ่งมีจุดยืนที่มีอยู่ทำให้ใช้งานได้สะดวก การสื่อสารผ่านดาวเทียม: เมื่อวางทิศทางแล้ว เสาอากาศจะชี้ไปที่ดาวเทียมที่เลือกไว้เสมอ (เว้นแต่จะเปลี่ยนตำแหน่ง)
ในการถ่ายโอนดาวเทียมจากวงโคจรระดับความสูงต่ำไปยังวงโคจร geostationary จะใช้วงโคจรถ่ายโอน geostationary (GTO) - วงโคจรรูปไข่ที่มี perigee ที่ระดับความสูงต่ำและ apogee ที่ระดับความสูงใกล้กับวงโคจร geostationary
หลังจากเสร็จสิ้นการดำเนินการกับเชื้อเพลิงที่เหลืออยู่ ดาวเทียมจะต้องถูกย้ายไปยังวงโคจรกำจัดซึ่งอยู่เหนือ GEO 200-300 กม.
การคำนวณพารามิเตอร์วงโคจรค้างฟ้า
รัศมีวงโคจรและความสูงของวงโคจร
ในวงโคจรค้างฟ้า ดาวเทียมจะไม่เข้าใกล้หรือเคลื่อนออกจากโลก และยิ่งไปกว่านั้น เมื่อหมุนไปพร้อมกับโลก ดาวเทียมจะอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรตลอดเวลา ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจึงต้องสร้างสมดุลซึ่งกันและกัน ในการคำนวณความสูงของวงโคจรค้างฟ้า คุณสามารถใช้วิธีนี้ได้ กลศาสตร์คลาสสิกและเมื่อเคลื่อนไปยังกรอบอ้างอิงของดาวเทียม ให้ดำเนินการจากสมการต่อไปนี้
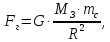
F u = F Γ (\displaystyle F_(u)=F_(\Gamma )),ที่ไหน F u (\displaystyle F_(u))- แรงเฉื่อยและในกรณีนี้คือแรงเหวี่ยง F Γ (\displaystyle F_(\Gamma ))- แรงโน้มถ่วง ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้ตามกฎแรงโน้มถ่วงสากลของนิวตัน:
F Γ = G ⋅ M 3 ⋅ m c R 2 (\รูปแบบการแสดงผล F_(\Gamma )=G\cdot (\frac (M_(3)\cdot m_(c))(R^(2)))),มวลของดาวเทียมอยู่ที่ไหน ม 3 (\รูปแบบการแสดงผล M_(3))- มวลของโลกเป็นกิโลกรัม G (\displaystyle G)คือค่าคงที่แรงโน้มถ่วง และ R (\รูปแบบการแสดงผล R)- ระยะทางเป็นเมตรจากดาวเทียมถึงใจกลางโลก หรือในกรณีนี้คือรัศมีของวงโคจร
ขนาดของแรงเหวี่ยงหนีศูนย์เท่ากับ:
F u = m c ⋅ a (\displaystyle F_(u)=m_(c)\cdot a),ที่ไหน ก (\displaystyle ก)- ความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
อย่างที่คุณเห็นมวลของดาวเทียม ม. ค (\displaystyle m_(c))ปรากฏเป็นตัวคูณในนิพจน์สำหรับแรงเหวี่ยงหนีศูนย์และแรงโน้มถ่วง กล่าวคือ ระดับความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียมซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลจากความเท่าเทียมกันของ มวลความโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรค้างฟ้าจะถูกกำหนดโดยระดับความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะมีขนาดเท่ากันและตรงกันข้ามในทิศทางกับแรงโน้มถ่วงที่สร้างขึ้นโดยแรงโน้มถ่วงของโลกที่ระดับความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางเท่ากับ:
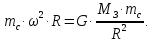
a = ω 2 ⋅ R (\displaystyle a=\omega ^(2)\cdot R),โดยที่ความเร็วเชิงมุมของการหมุนของดาวเทียมคือเรเดียนต่อวินาที
มาทำความเข้าใจประเด็นสำคัญกัน ในความเป็นจริง ความเร่งสู่ศูนย์กลางมีความหมายทางกายภาพเฉพาะในกรอบอ้างอิงเฉื่อยเท่านั้น ในขณะที่แรงหนีศูนย์กลางเป็นสิ่งที่เรียกว่าแรงในจินตนาการ และเกิดขึ้นเฉพาะในกรอบอ้างอิง (พิกัด) ที่เกี่ยวข้องกับวัตถุที่หมุนอยู่ แรงสู่ศูนย์กลาง (ในกรณีนี้คือ แรงโน้มถ่วง) ทำให้เกิดการเร่งความเร็วสู่ศูนย์กลาง ในค่าสัมบูรณ์ ความเร่งสู่ศูนย์กลางในกรอบอ้างอิงเฉื่อยจะเท่ากับความเร่งสู่ศูนย์กลางในหน้าต่างอ้างอิงที่เกี่ยวข้องในกรณีของเรากับดาวเทียม ดังนั้น เมื่อคำนึงถึงข้อสังเกตที่ตั้งไว้แล้ว เราจึงสามารถใช้คำว่า "ความเร่งสู่ศูนย์กลาง" ร่วมกับคำว่า "แรงเหวี่ยง" ได้
เราได้รับสมการนิพจน์สำหรับแรงโน้มถ่วงและแรงเหวี่ยงด้วยการแทนที่ความเร่งสู่ศูนย์กลาง:
m c ⋅ ω 2 ⋅ R = G ⋅ M 3 ⋅ m c R 2 (\displaystyle m_(c)\cdot \omega ^(2)\cdot R=G\cdot (\frac (M_(3)\cdot m_(c) ))(ร^(2)))).กำลังลด ม. ค (\displaystyle m_(c)), กำลังแปล R 2 (\รูปแบบการแสดงผล R^(2))ไปทางซ้ายและ ω 2 (\displaystyle \โอเมก้า ^(2))ทางด้านขวาเราจะได้:
R 3 = G ⋅ M 3 ω 2 (\displaystyle R^(3)=G\cdot (\frac (M_(3))(\omega ^(2)))) R = G ⋅ M 3 ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (G\cdot M_(3))(\omega ^(2))))).นิพจน์นี้สามารถเขียนให้แตกต่างออกไปได้โดยการแทนที่ G ⋅ M 3 (\displaystyle G\cdot M_(3))บน μ (\displaystyle \mu )- ค่าคงที่แรงโน้มถ่วงศูนย์กลางโลก:
R = μ ω 2 3 (\displaystyle R=(\sqrt[(3)](\frac (\mu )(\omega ^(2)))))ความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )คำนวณโดยการหารมุมที่เคลื่อนที่ในหนึ่งรอบ ( 360 ∘ = 2 ⋅ π (\displaystyle 360^(\circ )=2\cdot \pi )เรเดียน) สำหรับคาบการโคจร (เวลาที่ใช้ในการหมุนรอบวงโคจรครบหนึ่งรอบ: วันดาวฤกษ์หนึ่งวัน หรือ 86,164 วินาที) เราได้รับ:
ω = 2 ⋅ π 86164 = 7 , 29 ⋅ 10 − 5 (\displaystyle \omega =(\frac (2\cdot \pi )(86164))=7.29\cdot 10^(-5)) ราด/เอสรัศมีวงโคจรที่ได้คือ 42,164 กม. เมื่อลบรัศมีเส้นศูนย์สูตรของโลกออกไป 6,378 กม. เราจะได้ระดับความสูง 35,786 กม.
คุณสามารถคำนวณด้วยวิธีอื่นได้ ระดับความสูงของวงโคจรค้างฟ้าคือระยะห่างจากจุดศูนย์กลางของโลก โดยที่ความเร็วเชิงมุมของดาวเทียมซึ่งสอดคล้องกับความเร็วเชิงมุมของการหมุนของโลก ทำให้เกิดความเร็วของวงโคจร (เชิงเส้น) เท่ากับความเร็วจักรวาลแรก (เพื่อให้แน่ใจว่า วงโคจรเป็นวงกลม) ที่ระดับความสูงที่กำหนด
ความเร็วเชิงเส้นของดาวเทียมที่เคลื่อนที่ด้วยความเร็วเชิงมุม ω (\displaystyle \โอเมก้า )ในระยะไกล R (\รูปแบบการแสดงผล R)จากจุดศูนย์กลางการหมุนเท่ากับ
v l = ω ⋅ R (\displaystyle v_(l)=\omega \cdot R)อันดับแรก ความเร็วหลบหนีในระยะไกล R (\รูปแบบการแสดงผล R)จากวัตถุที่มีมวล M (\displaystyle M)เท่ากับ
v k = G M R ;(\displaystyle v_(k)=(\sqrt (G(\frac (M)(R))));) เมื่อเท่ากันทางด้านขวาของสมการเราจะได้นิพจน์ที่ได้รับก่อนหน้านี้รัศมี
หน่วยงานภาครัฐ:R = G M ω 2 3 (\รูปแบบการแสดงผล R=(\sqrt[(3)](G(\frac (M)(\omega ^(2))))))
ความเร็ววงโคจร ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณความเร็วเชิงมุม
ต่อรัศมีวงโคจร: v = ω ⋅ R = 3.07 (\displaystyle v=\omega \cdot R=3.07)กม./วินาที
ซึ่งน้อยกว่าความเร็วจักรวาลแรกที่ 8 กม./วินาที ในวงโคจรโลกต่ำประมาณ 2.5 เท่า (โดยมีรัศมี 6,400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรวงกลมนั้นมีสัดส่วนผกผันกับรัศมีโวลต์ = G M R ;
(\displaystyle v=(\sqrt (G(\frac (M)(R))));)จากนั้นความเร็วที่ลดลงเมื่อเทียบกับความเร็วจักรวาลแรกนั้นทำได้โดยการเพิ่มรัศมีวงโคจรมากกว่า 6 เท่า
R ۞ 6400 ∗ (8 3 , 07) 2 ۞ 43000 (\รูปแบบการแสดงผล R\ประมาณ \,\!(6400*((\frac (8)(3.07)))^(2))\ประมาณ \,\ !43000 ) ความยาววงโคจรความยาววงโคจรค้างฟ้า:
2 ⋅ π ⋅ R (\รูปแบบการแสดงผล (2\cdot \pi \cdot R))
- ด้วยรัศมีวงโคจร 42,164 กม. เราจะได้ความยาววงโคจร 264,924 กม.
ดาวเทียมที่โคจรอยู่ในวงโคจรค้างฟ้าอยู่ภายใต้อิทธิพลของแรงจำนวนหนึ่ง (การรบกวน) ที่เปลี่ยนแปลงพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่งการรบกวนดังกล่าว ได้แก่ การรบกวนจากแรงโน้มถ่วงของดวงจันทร์-ดวงอาทิตย์ อิทธิพลของความไม่สอดคล้องกันของสนามโน้มถ่วงของโลก วงรีของเส้นศูนย์สูตร เป็นต้น การเสื่อมถอยของวงโคจรแสดงออกมาในปรากฏการณ์หลักสองประการ:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งวงโคจรเดิมไปยังจุดใดจุดหนึ่งของจุดสมดุลเสถียรที่เรียกว่า “หลุมวงโคจรค้างฟ้าที่อาจเกิดขึ้น” (ลองจิจูดอยู่ที่ 75.3°E, 104.7°W, 165.3°E และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก
2) ความเอียงของวงโคจรถึงเส้นศูนย์สูตรเพิ่มขึ้น (จากจุดเริ่มต้น 0) ในอัตราลำดับ 0.85 องศาต่อปี และถึง ค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยการรบกวนเหล่านี้และรักษาดาวเทียมให้อยู่ในจุดที่หยุดนิ่งที่กำหนด ดาวเทียมจึงติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) ด้วยการเปิดเครื่องยนต์แรงขับต่ำเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความโน้มเอียงของวงโคจรที่เพิ่มขึ้น และ "ตะวันตก-ตะวันออก" เพื่อชดเชยการเคลื่อนตัวไปตามวงโคจร) ดาวเทียมจะถูกเก็บไว้ที่จุดหยุดนิ่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งทุกๆ สองสาม (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขแนวเหนือ-ใต้ต้องการความเร็วลักษณะเฉพาะเพิ่มขึ้นอย่างมาก (ประมาณ 45-50 เมตร/วินาทีต่อปี) มากกว่าการแก้ไขตามยาว (ประมาณ 2 เมตร/วินาทีต่อปี) เพื่อให้แน่ใจว่าการแก้ไขวงโคจรของดาวเทียมตลอดอายุการใช้งาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจ่ายเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีที่ใช้เครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีการจ่ายเชื้อเพลิงแทนที่ (ชาร์จก๊าซฮีเลียม) และทำงานบนส่วนประกอบที่มีจุดเดือดสูงซึ่งมีอายุการใช้งานยาวนาน (โดยปกติคือไดเมทิลไฮดราซีนและไดไนโตรเจนเตตรอกไซด์ที่ไม่สมมาตร) ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องยนต์พลาสมา แรงขับของพวกมันนั้นสัมพันธ์กับสารเคมีน้อยกว่าอย่างมากอย่างไรก็ตามช่วยให้มีประสิทธิภาพมากขึ้น (เนื่องจาก ทำงานที่ยาวนานซึ่งวัดภายในสิบนาทีสำหรับการซ้อมรบเพียงครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเครื่องบินลงอย่างมาก การเลือกประเภทระบบขับเคลื่อนจะถูกกำหนดโดยเฉพาะ คุณสมบัติทางเทคนิคอุปกรณ์
หากจำเป็น จะใช้ระบบขับเคลื่อนเดียวกันนี้เพื่อเคลื่อนย้ายดาวเทียมไปยังตำแหน่งอื่นในวงโคจร ในบางกรณี - โดยปกติเมื่ออายุการใช้งานของดาวเทียมสิ้นสุดลง เพื่อลดการใช้เชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุดลง และเชื้อเพลิงที่เหลือจะถูกใช้สำหรับการแก้ไขวงโคจรตะวันตก-ตะวันออกเท่านั้น
การสำรองเชื้อเพลิงเป็นปัจจัยหลักในการจำกัดอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
ข้อเสียของวงโคจรค้างฟ้า
สัญญาณล่าช้า
การสื่อสารผ่านดาวเทียมค้างฟ้ามีลักษณะดังนี้ ความล่าช้าเป็นเวลานานในการกระจายสัญญาณ ด้วยระดับความสูงของวงโคจร 35,786 กม. และความเร็วแสงประมาณ 300,000 กม./วินาที การเดินทางของลำแสงโลก-ดาวเทียมใช้เวลาประมาณ 0.12 วินาที เส้นทางลำแสง “โลก (เครื่องส่ง) → ดาวเทียม → โลก (เครื่องรับ)” µs.0.24 วิ เวลาแฝงทั้งหมด (วัดโดยยูทิลิตี้ Ping) เมื่อใช้การสื่อสารผ่านดาวเทียมเพื่อรับและส่งข้อมูลจะอยู่ที่เกือบครึ่งวินาที โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียมในอุปกรณ์และใน ระบบเคเบิลการส่งสัญญาณบริการภาคพื้นดินความล่าช้าของสัญญาณทั้งหมดบนเส้นทาง "แหล่งสัญญาณ → ดาวเทียม → เครื่องรับ" สามารถเข้าถึงได้ 2-4 วินาที ความล่าช้านี้ทำให้ยากต่อการใช้ดาวเทียม GSO ในระบบโทรศัพท์ และทำให้ไม่สามารถใช้การสื่อสารผ่านดาวเทียมโดยใช้ GSO ในบริการเรียลไทม์ต่างๆ (เช่น ในเกมออนไลน์)
การมองไม่เห็นของ GSO จากละติจูดสูง
เนื่องจากไม่สามารถมองเห็นวงโคจรค้างฟ้าได้จากละติจูดสูง (จากประมาณ 81° ถึงขั้วโลก) และที่ละติจูดเหนือ 75° จะสังเกตเห็นได้ต่ำมากเหนือขอบฟ้า (ในสภาวะจริง ดาวเทียมจะถูกซ่อนไว้โดยวัตถุและภูมิประเทศที่ยื่นออกมา) และ มองเห็นเพียงส่วนเล็กๆ ของวงโคจร ( ดูตาราง) ดังนั้นการสื่อสารและการแพร่ภาพโทรทัศน์โดยใช้ GSO จึงเป็นไปไม่ได้ในภูมิภาคละติจูดสูงของ Far North (อาร์กติก) และแอนตาร์กติกา ตัวอย่างเช่น นักสำรวจขั้วโลกชาวอเมริกันที่สถานีอามุนด์เซน-สกอตต์ใช้สายเคเบิลใยแก้วนำแสงยาว 1,670 กิโลเมตรเพื่อสื่อสารกับโลกภายนอก (โทรศัพท์ อินเทอร์เน็ต) ไปยังตำแหน่งที่ตั้งอยู่ที่ 75° S สถานีคอนคอร์เดียของฝรั่งเศส ซึ่งมีดาวเทียมค้างฟ้าของอเมริกาหลายดวงที่มองเห็นได้แล้ว (~60°) ส่วนที่มองเห็นได้ของวงโคจร (และจำนวนดาวเทียมที่ได้รับด้วย) เท่ากับ 84% ของค่าสูงสุดที่เป็นไปได้ (เปิดและส่งสัญญาณ ดาวเทียมอยู่ในแนวเดียวกับเสาอากาศรับสัญญาณ (ตำแหน่ง "ดวงอาทิตย์" ด้านหลังดาวเทียม") ปรากฏการณ์นี้ยังเกิดขึ้นในวงโคจรอื่น แต่จะอยู่ในวงโคจรค้างฟ้า เมื่อดาวเทียม "หยุดนิ่ง" บนท้องฟ้า การรบกวนจากแสงอาทิตย์ ปรากฏชัดเจนโดยเฉพาะในละติจูดกลางของซีกโลกเหนือในช่วงตั้งแต่วันที่ 22 กุมภาพันธ์ถึง 11 มีนาคม และตั้งแต่วันที่ 3 ถึง 21 ตุลาคม โดยมีระยะเวลาสูงสุดไม่เกินสิบนาที .
การอ้างสิทธิ์ของรัฐเส้นศูนย์สูตรเหล่านี้ถูกปฏิเสธซึ่งขัดต่อหลักการไม่จัดสรรพื้นที่รอบนอก ข้อความดังกล่าวได้รับการวิพากษ์วิจารณ์อย่างสมเหตุสมผลจากคณะกรรมการอวกาศแห่งสหประชาชาติ ประการแรก ไม่มีใครสามารถอ้างสิทธิ์ในการจัดสรรอาณาเขตหรือพื้นที่ใดๆ ที่อยู่ห่างจากอาณาเขตของรัฐที่เกี่ยวข้องได้อย่างมีนัยสำคัญ ประการที่สอง พื้นที่รอบนอกไม่อยู่ภายใต้การจัดสรรของชาติ ประการที่สาม เป็นการไร้ความสามารถทางเทคนิคที่จะพูดคุยเกี่ยวกับความสัมพันธ์ทางกายภาพระหว่างอาณาเขตของรัฐกับพื้นที่ห่างไกลดังกล่าว ในที่สุด ในแต่ละกรณี ปรากฏการณ์ของดาวเทียมค้างฟ้าจะสัมพันธ์กับวัตถุอวกาศเฉพาะ หากไม่มีดาวเทียมก็ไม่มีวงโคจรค้างฟ้า
ในวงโคจรค้างฟ้า ดาวเทียมจะไม่เข้าใกล้หรือเคลื่อนออกจากโลก และยิ่งไปกว่านั้น เมื่อหมุนไปพร้อมกับโลก ดาวเทียมจะอยู่เหนือจุดใดๆ บนเส้นศูนย์สูตรตลอดเวลา ดังนั้นแรงโน้มถ่วงและแรงเหวี่ยงที่กระทำต่อดาวเทียมจึงต้องสร้างสมดุลซึ่งกันและกัน ในการคำนวณความสูงของวงโคจรค้างฟ้า คุณสามารถใช้วิธีกลศาสตร์คลาสสิก และดำเนินการจากสมการต่อไปนี้เมื่อย้ายไปยังกรอบอ้างอิงของดาวเทียม
แรงเฉื่อยอยู่ที่ไหน และในกรณีนี้ แรงเหวี่ยง คือแรงโน้มถ่วง ขนาดของแรงโน้มถ่วงที่กระทำต่อดาวเทียมสามารถกำหนดได้ตามกฎแรงโน้มถ่วงสากลของนิวตัน:
โดยที่มวลของดาวเทียมคือมวลของโลกเป็นกิโลกรัม คือค่าคงที่แรงโน้มถ่วง และคือรัศมีของวงโคจร (ระยะห่างเป็นเมตรจากดาวเทียมถึงศูนย์กลางโลก)
ขนาดของแรงเหวี่ยงหนีศูนย์เท่ากับ:
โดยที่คือความเร่งสู่ศูนย์กลางที่เกิดขึ้นระหว่างการเคลื่อนที่เป็นวงกลมในวงโคจร
ดังที่เห็นได้ มวลของดาวเทียมแสดงอยู่ในทั้งแรงเหวี่ยงหนีศูนย์และแรงโน้มถ่วง นั่นคือ ความสูงของวงโคจรไม่ได้ขึ้นอยู่กับมวลของดาวเทียม ซึ่งเป็นจริงสำหรับวงโคจรใดๆ และเป็นผลมาจากความเท่าเทียมกันของมวลความโน้มถ่วงและแรงเฉื่อย ดังนั้น วงโคจรค้างฟ้าจะถูกกำหนดโดยระดับความสูงที่แรงเหวี่ยงหนีศูนย์กลางจะมีขนาดเท่ากันและตรงกันข้ามในทิศทางกับแรงโน้มถ่วงที่สร้างขึ้นโดยแรงโน้มถ่วงของโลกที่ระดับความสูงที่กำหนด
ความเร่งสู่ศูนย์กลางเท่ากับ:
โดยที่ คือ ความเร็วเชิงมุมของการหมุนของดาวเทียม มีหน่วยเป็นเรเดียนต่อวินาที
จากความเท่าเทียมกันของแรงโน้มถ่วงและแรงเหวี่ยงเราได้รับ:
ความเร็วเชิงมุม ω คำนวณโดยการหารมุมที่เคลื่อนที่ในการปฏิวัติหนึ่งครั้งด้วยคาบการโคจร (เวลาที่ใช้ในการหมุนการปฏิวัติในวงโคจรครบหนึ่งครั้ง: หนึ่งวันดาวฤกษ์หรือ 86,164 วินาที) เราได้รับ:
 ราด/เอส
ราด/เอสรัศมีวงโคจรโดยประมาณคือ 42,164 กม. เมื่อลบรัศมีเส้นศูนย์สูตรของโลกออกไป 6,378 กม. เราจะได้ระดับความสูง GEO ที่ 35,786 กม.
ความเร็ววงโคจร
ความเร็วของการเคลื่อนที่ในวงโคจรค้างฟ้าคำนวณโดยการคูณความเร็วเชิงมุมด้วยรัศมีของวงโคจร: km/s
ซึ่งน้อยกว่าความเร็วหลุดพ้นครั้งแรกประมาณ 8 กม./วินาที สำหรับวงโคจรใกล้โลก (โดยมีรัศมี 6,400 กม.) เนื่องจากกำลังสองของความเร็วสำหรับวงโคจรวงกลมนั้นแปรผกผันกับรัศมี ความเร็วที่ลดลงเมื่อเทียบกับความเร็วจักรวาลแรกจึงทำได้โดยการเพิ่มรัศมีวงโคจรมากกว่า 6 เท่า
ความยาววงโคจร
ความยาววงโคจรค้างฟ้า: . ด้วยรัศมีวงโคจร 42,164 กม. เราจะได้ความยาววงโคจร 264,924 กม. ความยาวของวงโคจรมีความสำคัญอย่างยิ่งในการคำนวณ "จุดยืน" ของดาวเทียม
การรักษาดาวเทียมให้อยู่ในตำแหน่งวงโคจรในวงโคจรค้างฟ้า ดาวเทียมที่โคจรอยู่ในวงโคจรค้างฟ้าอยู่ภายใต้อิทธิพลของแรงจำนวนหนึ่ง (การรบกวน) ที่เปลี่ยนพารามิเตอร์ของวงโคจรนี้ โดยเฉพาะอย่างยิ่งการรบกวนดังกล่าว ได้แก่ การรบกวนจากแรงโน้มถ่วงของดวงจันทร์-ดวงอาทิตย์ อิทธิพลของความไม่สอดคล้องกันของสนามโน้มถ่วงของโลก วงรีของเส้นศูนย์สูตร เป็นต้น ความเสื่อมโทรมของวงโคจรแสดงออกมาในสองปรากฏการณ์หลัก:
1) ดาวเทียมเคลื่อนที่ไปตามวงโคจรจากตำแหน่งวงโคจรเดิมไปยังจุดใดจุดหนึ่งจากสี่จุดที่มีความสมดุลเสถียร ซึ่งเรียกว่า "หลุมที่มีศักยภาพของวงโคจรค้างฟ้า" (ลองจิจูดคือ 75.3°E, 104.7°W, 165.3°E และ 14.7°W) เหนือเส้นศูนย์สูตรของโลก;
2) ความเอียงของวงโคจรถึงเส้นศูนย์สูตรจะเพิ่มขึ้น (จากจุดเริ่มต้น = 0) ในอัตราประมาณ 0.85 องศาต่อปี และถึงค่าสูงสุด 15 องศาใน 26.5 ปี
เพื่อชดเชยการรบกวนเหล่านี้และรักษาดาวเทียมให้อยู่ในจุดที่หยุดนิ่งที่กำหนด ดาวเทียมจึงติดตั้งระบบขับเคลื่อน (จรวดเคมีหรือไฟฟ้า) ด้วยการเปิดเครื่องยนต์แรงขับต่ำเป็นระยะ (แก้ไข "เหนือ-ใต้" เพื่อชดเชยความโน้มเอียงของวงโคจรที่เพิ่มขึ้น และ "ตะวันตก-ตะวันออก" เพื่อชดเชยการเคลื่อนตัวไปตามวงโคจร) ดาวเทียมจะถูกเก็บไว้ที่จุดหยุดนิ่งที่กำหนด การรวมดังกล่าวเกิดขึ้นหลายครั้งทุกๆ สองสาม (10-15) วัน เป็นสิ่งสำคัญที่การแก้ไขแนวเหนือ-ใต้ต้องการความเร็วลักษณะเฉพาะเพิ่มขึ้นอย่างมาก (ประมาณ 45-50 เมตร/วินาทีต่อปี) มากกว่าการแก้ไขตามยาว (ประมาณ 2 เมตร/วินาทีต่อปี) เพื่อให้แน่ใจว่าการแก้ไขวงโคจรของดาวเทียมตลอดอายุการใช้งาน (12-15 ปีสำหรับดาวเทียมโทรทัศน์สมัยใหม่) จำเป็นต้องมีการจ่ายเชื้อเพลิงจำนวนมากบนเรือ (หลายร้อยกิโลกรัม ในกรณีที่ใช้เครื่องยนต์เคมี) เครื่องยนต์จรวดเคมีของดาวเทียมมีระบบจ่ายเชื้อเพลิงแบบแทนที่ (เพิ่มแก๊ส - ฮีเลียม) และทำงานบนส่วนประกอบที่มีจุดเดือดสูงและมีอายุการใช้งานยาวนาน (โดยปกติจะเป็นไดเมทิลไฮดราซีนและไนโตรเจนเตตรอกไซด์ที่ไม่สมมาตร) ดาวเทียมจำนวนหนึ่งติดตั้งเครื่องยนต์พลาสมา แรงขับของพวกมันน้อยกว่าแรงขับแบบเคมีอย่างมาก แต่ประสิทธิภาพที่สูงกว่าช่วยให้ (เนื่องจากการทำงานเป็นเวลานานซึ่งวัดได้ในเวลาสิบนาทีสำหรับการซ้อมรบครั้งเดียว) เพื่อลดมวลเชื้อเพลิงที่ต้องการบนเรืออย่างรุนแรง การเลือกประเภทของระบบขับเคลื่อนจะขึ้นอยู่กับคุณสมบัติทางเทคนิคเฉพาะของอุปกรณ์
หากจำเป็น จะใช้ระบบขับเคลื่อนเดียวกันนี้เพื่อเคลื่อนย้ายดาวเทียมไปยังตำแหน่งอื่นในวงโคจร ในบางกรณี ซึ่งโดยปกติเมื่ออายุการใช้งานของดาวเทียมสิ้นสุดลง เพื่อลดการใช้เชื้อเพลิง การแก้ไขวงโคจรเหนือ-ใต้จะหยุดลง และเชื้อเพลิงที่เหลือจะถูกใช้สำหรับการแก้ไขวงโคจรตะวันตก-ตะวันออกเท่านั้น การสำรองเชื้อเพลิงเป็นปัจจัยหลักในการจำกัดอายุการใช้งานของดาวเทียมในวงโคจรค้างฟ้า
บทที่ 3
วงโคจรของดาวเทียมโลกเทียม การปล่อยดาวเทียมขึ้นสู่วงโคจร
วิถีโคจรของดาวเทียมประดิษฐ์เรียกว่าวงโคจร ในระหว่างการบินอย่างอิสระของดาวเทียม เมื่ออยู่บนเครื่อง เครื่องยนต์ไอพ่นถูกปิด การเคลื่อนไหวเกิดขึ้นภายใต้อิทธิพลของแรงโน้มถ่วงและความเฉื่อย โดยแรงหลักคือแรงโน้มถ่วงของโลก
หากเราพิจารณาว่าโลกมีลักษณะเป็นทรงกลมอย่างเคร่งครัด และการกระทำของสนามโน้มถ่วงของโลกเป็นแรงเดียวที่กระทำบนดาวเทียม การเคลื่อนที่ของดาวเทียมจะเป็นไปตามกฎเคปเลอร์ที่รู้จักกันดี: มันเกิดขึ้นในการเคลื่อนที่ (ในอวกาศสัมบูรณ์) ) ระนาบที่ผ่านจุดศูนย์กลางของโลก - ระนาบวงโคจร; วงโคจรมีรูปร่างเป็นวงรี (รูปที่ 3.1) หรือวงกลม (กรณีพิเศษของวงรี)
เมื่อดาวเทียมเคลื่อนที่ พลังงานกลทั้งหมด (จลน์และศักย์) ยังคงไม่เปลี่ยนแปลง ด้วยเหตุนี้ เมื่อดาวเทียมเคลื่อนที่ออกจากโลก ความเร็วในการเคลื่อนที่จะลดลง
สมการวงโคจรทรงรีของดาวเทียมโลก ระบบขั้วโลกพิกัดถูกกำหนดโดยสูตร
ในกรณีของวงโคจรรูปไข่ จุด perigee คือจุดของวงโคจรที่สอดคล้องกับค่าที่น้อยที่สุดของเวกเตอร์รัศมี r = rп จุด apogee คือจุดที่สอดคล้องกับค่าที่ใหญ่ที่สุด r = ra (รูปที่ 3.2)
โลกตั้งอยู่ที่จุดโฟกัสจุดหนึ่งของวงรี ปริมาณที่รวมอยู่ในสูตร (3.1) มีความสัมพันธ์กันโดยความสัมพันธ์:
ระยะห่างระหว่างจุดโฟกัสและศูนย์กลางของวงรีคือ ae กล่าวคือ แปรผันตามความเยื้องศูนย์กลาง ความสูงของดาวเทียมเหนือพื้นผิวโลก
ที่ไหน ร-รัศมีของโลก เส้นตัดของระนาบการโคจรกับระนาบเส้นศูนย์สูตร (a - a ในรูปที่ 3.1) เรียกว่าเส้นของโหนดมุม i ระหว่างระนาบการโคจรและระนาบเส้นศูนย์สูตรคือความเอียงของวงโคจร ขึ้นอยู่กับความเอียง เส้นศูนย์สูตร (i = 0°) ขั้ว (i = 90°) และวงโคจรเอียง (0°
วงโคจรของดาวเทียมยังมีลักษณะเฉพาะด้วยลองจิจูดสูงสุด d - ลองจิจูดของจุดย่อยดาวเทียม (จุดตัดของเวกเตอร์รัศมีกับพื้นผิวโลก) ในขณะที่ดาวเทียมผ่านจุดสุดยอดและคาบการโคจร T (เวลา ระหว่างสองตอนติดต่อกันของจุดวงโคจรเดียวกัน)
สำหรับระบบการสื่อสารและการแพร่ภาพกระจายเสียง จำเป็นต้องมีแนวการมองเห็นโดยตรงระหว่างดาวเทียมและสถานีภาคพื้นดินที่เกี่ยวข้องเพื่อให้เซสชันการสื่อสารมีระยะเวลาเพียงพอ หากเซสชันไม่ตลอดเวลา จะสะดวกที่จะทำซ้ำทุกวันในเวลาเดียวกัน ดังนั้น วงโคจรแบบซิงโครนัสที่มีคาบการหมุนเท่ากับหรือหลายเท่าของเวลาที่โลกหมุนรอบแกนของมัน เช่น วันดาวฤกษ์ (23 ชั่วโมง 56 นาที 4 วินาที) จึงเป็นที่ต้องการ
วงโคจรทรงรีสูงที่มีระยะเวลาการโคจร 12 ชั่วโมงถูกนำมาใช้กันอย่างแพร่หลายเมื่อใช้ดาวเทียม Molniya สำหรับการสื่อสารและระบบแขวน (ระดับความสูงของ perigee 500 กม., ระดับความสูงสูงสุด 40,000 กม.) การเคลื่อนที่ของดาวเทียมที่ระดับความสูง - ในภูมิภาคสุดยอด - จะช้าลง และดาวเทียมจะผ่านบริเวณรอบนอกซึ่งอยู่เหนือซีกโลกใต้ของโลกอย่างรวดเร็ว โซนการมองเห็นของดาวเทียมประดิษฐ์ในวงโคจรประเภทมอลนิยาระหว่างวงโคจรส่วนใหญ่นั้นมีขนาดใหญ่เนื่องจากระดับความสูงที่สำคัญ ตั้งอยู่ในซีกโลกเหนือและสะดวกสำหรับประเทศทางตอนเหนือ การให้บริการในดินแดนทั้งหมดของอดีตสหภาพโซเวียตโดยดาวเทียมดวงใดดวงหนึ่งนั้นเป็นไปได้อย่างน้อย 8 ชั่วโมงดังนั้นดาวเทียมสามดวงที่เข้ามาแทนที่กันจึงเพียงพอสำหรับการใช้งานตลอด 24 ชั่วโมง ในปัจจุบัน เพื่อลดการหยุดชะงักในการสื่อสารและการออกอากาศ ลดความซับซ้อนของระบบชี้ตำแหน่งสำหรับเสาอากาศของสถานีภาคพื้นดินบนดาวเทียมและข้อได้เปรียบในการดำเนินงานอื่น ๆ ได้มีการเปลี่ยนมาใช้การใช้วงโคจรค้างฟ้า (GSO) ของดาวเทียมโลก
วงโคจรของดาวเทียมค้างฟ้ามีลักษณะเป็นวงกลม (ความเยื้องศูนย์ e = 0) เส้นศูนย์สูตร (ความเอียง i = 0°) วงโคจรแบบซิงโครนัสซึ่งมีคาบการโคจร 24 ชั่วโมง โดยดาวเทียมเคลื่อนที่ไปในทิศทางตะวันออก
ย้อนกลับไปในปี 1945 วงโคจร GSO ได้รับการคำนวณและเสนอให้ใช้สำหรับดาวเทียมสื่อสารโดยวิศวกรชาวอังกฤษ Arthur Clarke ซึ่งต่อมาเป็นที่รู้จักในฐานะนักเขียนนิยายวิทยาศาสตร์ ในอังกฤษและประเทศอื่นๆ วงโคจรค้างฟ้าเรียกว่า "แถบคลาร์ก" (รูปที่ 3.3)
วงโคจรมีรูปร่างเป็นวงกลมวางอยู่บนระนาบของเส้นศูนย์สูตรของโลก โดยมีความสูงเหนือพื้นผิวโลก 35,786 กิโลเมตร ทิศทางการหมุนของดาวเทียมเกิดขึ้นพร้อมกับทิศทางการหมุนของโลกในแต่ละวัน ดังนั้นสำหรับผู้สังเกตการณ์บนโลก ดาวเทียมจึงดูเหมือนไม่มีการเคลื่อนไหว ณ จุดใดจุดหนึ่งในซีกโลกท้องฟ้า
วงโคจรค้างฟ้ามีเอกลักษณ์เฉพาะตรงที่เมื่อไม่มีการรวมกันของพารามิเตอร์อื่นๆ จึงเป็นไปได้ที่จะทำให้ดาวเทียมที่เคลื่อนที่อย่างอิสระไม่สามารถเคลื่อนที่ได้เมื่อเทียบกับผู้สังเกตการณ์บนโลก จำเป็นต้องทราบข้อดีบางประการของดาวเทียมค้างฟ้า การสื่อสารดำเนินไปอย่างต่อเนื่องตลอดเวลาโดยไม่มีการเปลี่ยนผ่าน (ดาวเทียมเข้าสู่อีกดวงหนึ่ง)
บนเสาอากาศของสถานีภาคพื้นดินระบบติดตามดาวเทียมอัตโนมัติได้รับการทำให้ง่ายขึ้นและในบางส่วนก็ถูกกำจัดออกไปด้วยซ้ำ
กลไกในการขับเคลื่อน (เคลื่อนย้าย) เสาอากาศส่งและรับมีน้ำหนักเบา ลดความซับซ้อน และประหยัดยิ่งขึ้น ค่าการลดทอนสัญญาณบนเส้นทาง Earth-Space มีเสถียรภาพมากขึ้น โซนการมองเห็นของดาวเทียมค้างฟ้าอยู่ที่ประมาณหนึ่งในสามของพื้นผิวโลก ดาวเทียมค้างฟ้าสามดวงเพียงพอที่จะสร้างระบบการสื่อสารทั่วโลก ไม่มีการเปลี่ยนความถี่ (หรือน้อยมาก) เนื่องจากเอฟเฟกต์ดอปเปลอร์
เอฟเฟกต์ดอปเปลอร์เป็นปรากฏการณ์ทางกายภาพที่เกี่ยวข้องกับการเปลี่ยนแปลงความถี่ของการสั่นของแม่เหล็กไฟฟ้าความถี่สูงเมื่อเครื่องส่งและเครื่องรับเคลื่อนที่ร่วมกัน อธิบายปรากฏการณ์ดอปเปลอร์ได้ดังนี้
ความหนาแน่นของระยะทางในเวลา ผลกระทบนี้อาจเกิดขึ้นเมื่อดาวเทียมเคลื่อนที่ในวงโคจร บนสายการสื่อสารผ่านดาวเทียมตั้งท้องอย่างเคร่งครัด การเคลื่อนตัวของดอปเปลอร์จะไม่เกิดขึ้น บนดาวเทียมค้างฟ้าจริงจะมีนัยสำคัญเพียงเล็กน้อย และบนวงโคจรรูปวงรีที่ยาวมากหรือวงโคจรวงกลมต่ำก็อาจมีนัยสำคัญได้ ผลกระทบดังกล่าวแสดงให้เห็นว่าเป็นความไม่เสถียรของความถี่พาหะของการแกว่งที่ถ่ายทอดโดยดาวเทียม ซึ่งเพิ่มเข้ากับความไม่เสถียรของความถี่ฮาร์ดแวร์ที่เกิดขึ้นในอุปกรณ์ของทวนสัญญาณออนบอร์ดและสถานีภาคพื้นดิน ความไม่เสถียรนี้อาจทำให้การรับสัญญาณยุ่งยากขึ้นอย่างมาก ส่งผลให้ภูมิคุ้มกันสัญญาณรบกวนการรับสัญญาณลดลง
น่าเสียดายที่เอฟเฟกต์ Doppler มีส่วนทำให้เกิดการเปลี่ยนแปลงความถี่ของการมอดูเลตออสซิลเลชัน การบีบอัด (หรือการขยาย) สเปกตรัมของสัญญาณที่ส่งนี้ไม่สามารถควบคุมได้โดยวิธีฮาร์ดแวร์ ดังนั้นหากการเปลี่ยนความถี่เกินขีดจำกัดที่ยอมรับได้ (เช่น 2 Hz สำหรับอุปกรณ์แบ่งความถี่บางประเภท) ช่องสัญญาณดังกล่าวจะยอมรับไม่ได้
ความล่าช้าของสัญญาณวิทยุระหว่างการแพร่กระจายไปตามโลก - ดาวเทียม - เส้นโลกก็มีผลกระทบอย่างมีนัยสำคัญต่อคุณสมบัติของช่องทางการสื่อสารเช่นกัน
เมื่อส่งข้อความแบบซิมเพล็กซ์ (ทิศทางเดียว) (รายการโทรทัศน์ การแพร่เสียง และข้อความแยกอื่น ๆ (ไม่ต่อเนื่อง) ผู้บริโภคจะไม่รู้สึกถึงความล่าช้านี้ อย่างไรก็ตาม ด้วยการสื่อสารแบบดูเพล็กซ์ (สองทาง) ความล่าช้าหลายวินาทีจะสังเกตเห็นได้ชัดเจนอยู่แล้ว ตัวอย่างเช่น คลื่นแม่เหล็กไฟฟ้าจากโลกไปยัง GEO และ "เดินทาง" กลับเป็นเวลา 2...4 วินาที (โดยคำนึงถึงความล่าช้าของสัญญาณในอุปกรณ์ดาวเทียม) และไปยังอุปกรณ์ภาคพื้นดิน ในกรณีนี้ มันไม่สมเหตุสมผล ส่งสัญญาณเวลาที่แน่นอน
การปล่อยดาวเทียมค้างฟ้าสู่วงโคจรมักจะดำเนินการโดยจรวดหลายขั้นผ่านวงโคจรระดับกลาง ยานปล่อยสมัยใหม่เป็นยานอวกาศที่ซับซ้อนซึ่งขับเคลื่อนด้วยแรงปฏิกิริยาของเครื่องยนต์จรวด
ยานปล่อยจรวดประกอบด้วยจรวดและบล็อคส่วนหัว หน่วยจรวดเป็นส่วนอิสระของจรวดประกอบที่มีช่องเชื้อเพลิง ระบบขับเคลื่อน และองค์ประกอบของระบบแยกเวที ส่วนหัวประกอบด้วยน้ำหนักบรรทุกและแฟริ่งที่ปกป้องโครงสร้างของดาวเทียมจากกำลังและผลกระทบทางความร้อนของการไหลของอากาศที่เข้ามาในระหว่างการบินในชั้นบรรยากาศ และทำหน้าที่สำหรับการติดตั้งบนองค์ประกอบพื้นผิวด้านในที่เกี่ยวข้องกับการเตรียมการปล่อย แต่ ไม่ทำงานบนเครื่องบิน แฟริ่งหลักทำให้การออกแบบดาวเทียมเบาลงได้และเป็นองค์ประกอบแบบพาสซีฟ ซึ่งความต้องการจะหายไปหลังจากที่ยานปล่อยยานออกจากชั้นบรรยากาศที่หนาแน่นซึ่งมันถูกทิ้งลง น้ำหนักบรรทุกของยานอวกาศประกอบด้วยอุปกรณ์สื่อสารและกระจายเสียงแบบถ่ายทอด ระบบโทรมาตรทางวิทยุ ตัวดาวเทียมพร้อมระบบเสริมและสนับสนุนทั้งหมด
หลักการทำงานของยานปล่อยแบบหลายขั้นตอนแบบใช้แล้วทิ้งมีดังนี้: ในขณะที่ระยะแรกกำลังทำงาน ส่วนที่เหลือพร้อมกับน้ำหนักบรรทุกจริงจะถือเป็นน้ำหนักบรรทุกระยะแรก หลังจากแยกออกจากกัน อันที่สองก็เริ่มทำงานซึ่งเมื่อรวมกับขั้นตอนต่อ ๆ ไปและน้ำหนักบรรทุกจริงจะก่อให้เกิดจรวดอิสระตัวใหม่ สำหรับขั้นตอนที่สอง ขั้นตอนที่ตามมาทั้งหมด (ถ้ามี) มีบทบาทเป็นน้ำหนักบรรทุกพร้อมกับน้ำหนักบรรทุกจริง และอื่นๆ กล่าวคือ การบินมีลักษณะเป็นหลายขั้นตอน ซึ่งแต่ละขั้นตอนก็เหมือนกับขั้นตอนในการถ่ายทอด ความเร็วเริ่มต้นของจรวดระยะเดียวอื่นๆ ที่รวมอยู่ในองค์ประกอบ ในกรณีนี้ ความเร็วเริ่มต้นของจรวดระยะเดียวแต่ละลำที่ตามมาจะเท่ากับความเร็วสุดท้ายของจรวดก่อนหน้า ขั้นตอนแรกและขั้นตอนถัดไปของตัวพาจะถูกปฏิเสธหลังจากการเผาไหม้เชื้อเพลิงในระบบขับเคลื่อนโดยสมบูรณ์
เส้นทางที่ยานปล่อยใช้เมื่อปล่อยดาวเทียมเทียมขึ้นสู่วงโคจรเรียกว่าเส้นทางการบิน มีลักษณะเฉพาะคือส่วนแอคทีฟและพาสซีฟ ระยะแอคทีฟของการบินคือการบินของระยะยานปล่อยจรวดโดยที่เครื่องยนต์กำลังทำงาน ระยะพาสซีฟคือการบินของหน่วยจรวดที่ใช้แล้วหลังจากแยกตัวออกจากยานปล่อย
เรือบรรทุกเครื่องบินเริ่มต้นในแนวตั้ง (ส่วนที่ 1 ตั้งอยู่ที่ระดับความสูง 185... 250 กม.) จากนั้นเข้าสู่ทางโค้ง
ไซต์งาน 2 ไปทางทิศตะวันออก ในส่วนนี้ ขั้นตอนแรกช่วยให้มุมเอียงของแกนลดลงทีละน้อยโดยสัมพันธ์กับขอบฟ้าในพื้นที่ ส่วนที่ 3, 4 เป็นส่วนการบินที่ใช้งานอยู่ของระยะที่สองและสามตามลำดับ 5 คือวงโคจรดาวเทียม 6, 7 เป็นส่วนการบินแบบพาสซีฟของหน่วยจรวดระยะที่หนึ่งและสอง (รูปที่ 3.4)
เมื่อปล่อยดาวเทียมเทียมขึ้นสู่วงโคจรที่เหมาะสม เวลาและสถานที่ในการปล่อยยานจะมีบทบาทสำคัญ มีการคำนวณว่าการวางคอสโมโดรมให้ใกล้กับเส้นศูนย์สูตรมากที่สุดจะเป็นประโยชน์มากกว่า เนื่องจากเมื่อเร่งความเร็วไปในทิศทางทิศตะวันออก ยานส่งจรวดจะได้รับความเร็วเพิ่มเติม ความเร็วนี้เรียกว่าความเร็วรอบนอกของคอสโมโดรม Vк นั่นคือ ความเร็วของการเคลื่อนที่รอบแกนโลกเนื่องจากการหมุนรอบโลกในแต่ละวัน
กล่าวคือ ที่เส้นศูนย์สูตรจะเท่ากับ 465 เมตร/วินาที และที่ละติจูดของไบโคนูร์คอสโมโดรม - 316 เมตร/วินาที ในทางปฏิบัติ นี่หมายความว่าดาวเทียมที่หนักกว่าสามารถถูกปล่อยจากเส้นศูนย์สูตรได้ด้วยยานส่งเดียวกัน
ขั้นตอนสุดท้ายของการบินของยานปล่อยจรวดคือการปล่อยดาวเทียมขึ้นสู่วงโคจร รูปร่างของดาวเทียมจะถูกกำหนดโดยพลังงานจลน์ที่จรวดส่งให้ดาวเทียม กล่าวคือ ความเร็วสุดท้ายของเรือบรรทุก ในกรณีที่ดาวเทียมได้รับพลังงานเพียงพอที่จะส่งเข้าสู่ GEO ยานพาหนะส่งจะต้องปล่อยดาวเทียมไปยังจุดที่ห่างจากโลก 35,875 กม. และให้ความเร็ว 3,075 เมตรต่อวินาที
ความเร็ววงโคจรของดาวเทียมค้างฟ้านั้นคำนวณได้ง่าย ความสูงของ GEO เหนือพื้นผิวโลกคือ 35,786 กม. รัศมีของ GEO นั้นใหญ่กว่า 6366 กม. (รัศมีเฉลี่ยของโลก) เช่น 42,241 กม. เมื่อคูณค่ารัศมี GSO ด้วย 2l (6.28) เราจะได้เส้นรอบวง - 265,409 กม. หากเราหารด้วยระยะเวลาของวันเป็นวินาที (86,400 วินาที) เราจะได้ความเร็ววงโคจรของดาวเทียม - โดยเฉลี่ย 3.075 กม./วินาที หรือ 3,075 เมตร/วินาที
โดยทั่วไปแล้ว การปล่อยดาวเทียมด้วยยานส่งจะต้องดำเนินการในสี่ขั้นตอน: การเข้าสู่วงโคจรเริ่มต้น; เข้าสู่วงโคจร "รอ" (วงโคจรที่จอดรถ); เข้าสู่วงโคจรถ่ายโอน เข้าสู่วงโคจรสุดท้าย (รูปที่ 3.5) ตัวเลขดังกล่าวสอดคล้องกับขั้นตอนต่อไปนี้ในการปล่อยดาวเทียมสู่ GEO: 1 - วงโคจรการถ่ายโอนเริ่มต้น; 2 - ก่อน
การเปิดเครื่องยนต์ Apogee เพื่อเข้าสู่วงโคจรการถ่ายโอนระดับกลาง 3 - การกำหนดตำแหน่งในวงโคจร;
4 - การเปิดใช้งานเครื่องยนต์ Apogee ครั้งที่สองเพื่อเข้าสู่วงโคจรดริฟท์เริ่มต้น 5 - การปรับทิศทางของระนาบการโคจรและการแก้ไขข้อผิดพลาด 6 - การวางแนวตั้งฉากกับระนาบการโคจรและการแก้ไขข้อผิดพลาด 7 -
หยุดแพลตฟอร์มดาวเทียม, เปิดแผง, ปลดจรวดออกโดยสมบูรณ์ 8 - การเปิดเสาอากาศ, การเปิดไจโรสเตบิไลเซอร์; 9 - การรักษาเสถียรภาพของตำแหน่ง: การวางแนวเสาอากาศไปยังจุดที่ต้องการบนโลก, การวางแนวของแผงโซลาร์เซลล์ไปยังดวงอาทิตย์, การเปิดทวนสัญญาณออนบอร์ดและสร้างโหมดการทำงานที่ระบุ