ระบบดาวเทียมนำทางทั่วโลก การวัดการนำทางในระบบนำทางหลายช่องสัญญาณ การกำหนดพิกัดผู้บริโภค
อเล็กเซย์ มิคาอิลอฟหัวหน้าภาคส่วนศูนย์วิจัยสถาบันของรัฐบาลกลาง "ความปลอดภัย"
เมื่อเร็ว ๆ นี้มีการใช้ทั่วโลกเพิ่มมากขึ้น ระบบนำทางเพื่อกำหนดพิกัดของวัตถุรักษาความปลอดภัยทั้งแบบอยู่กับที่และแบบเคลื่อนที่
ไม่ได้อยู่ห่างจากการใช้มัน ความสำเร็จที่ทันสมัยอุปกรณ์และระบบรักษาความปลอดภัยส่วนตัว หน่วยงานรักษาความปลอดภัยใช้ระบบนำทางและติดตามมานานแล้วเช่น Almaz (Kodos-B LLC, มอสโก), Argo-Strazh (ระบบนำทาง JSC, Omsk), Arkan JSC "BaltAvtoPoisk", เซนต์ปีเตอร์สเบิร์ก, "Influx GPS" LLC (ความปลอดภัย) สำนัก Sokrat, อีร์คุตสค์)

นอกจากนี้ ในกรณีนี้ ดาวเทียมยังใช้คลื่นความถี่สองย่าน ซึ่งเดิมทีคลื่นความถี่ที่สองมีจุดประสงค์เพื่อใช้ในกองทัพที่มีความแม่นยำสูงเท่านั้น ณ จุดนี้ ในที่สุดเราก็สามารถออกจากวงโคจรของโลกแล้วกลับมาที่สมาร์ทโฟนของเราเพื่อดูว่าจะเกิดอะไรขึ้นเมื่อเราใช้แอปพลิเคชันที่ต้องใช้ความรู้เกี่ยวกับตำแหน่ง
อย่างไรก็ตาม หากจำเป็นต้องมี "ความแม่นยำสูง" อุปกรณ์จะต้องหันไปใช้การระบุตำแหน่งผ่านดาวเทียม "องค์ประกอบสุดท้าย" นี้ประกอบด้วยจริงๆ ระบบลำโพงซึ่งสามารถสะท้อนได้เฉพาะในย่านความถี่แคบเท่านั้น 
ผลึกเพียโซอิเล็กทริกที่แทรกเข้าไปในองค์ประกอบเหล่านี้แล้วเปลี่ยนรูป สัญญาณไฟฟ้าให้เป็นคลื่นเสียง ซึ่งถ้าเป็นเสียงสะท้อนก็จะถูกขยายและกลับเป็นไฟฟ้า แน่นอนว่าคลื่นที่อยู่นอกการสะท้อนจะถูกระงับโดยระบบ
ระบบนำทางเหล่านี้และระบบนำทางอื่นๆ อีกมากมายมีพื้นฐานมาจากตัวรับสัญญาณ GPS (ระบบนำทาง Arkan ยังสามารถใช้วิธีการค้นหาทิศทางแบบดั้งเดิมในการระบุตำแหน่งของวัตถุ) ดังนั้นพนักงานที่ใช้ระบบเหล่านี้ในการทำงานจำเป็นต้องมีความเข้าใจโดยทั่วไป ของหลักการ การทำงานของจีพีเอสและรู้ชัดเจนว่าสิ่งใดสามารถเรียกร้องจากระบบดังกล่าวได้ และสิ่งใดที่ไม่ควรคาดหวังจากระบบดังกล่าว
สิ่งนี้ต้องการออสซิลเลเตอร์ที่เชื่อถือได้มากเพื่อให้การแก้ไขสัญญาณรวดเร็ว 
ความเร็วของกระบวนการนี้สามารถเพิ่มขึ้นได้โดยใช้การระบุตำแหน่งแบบช่วยซึ่งการใช้ข้อมูลที่ส่งผ่านเครือข่ายเซลลูล่าร์ทำให้โมดูลรับสัญญาณสามารถทราบรายการดาวเทียมในมุมมองและตำแหน่งของดาวเทียมโดยประมาณได้โดยประมาณ ซึ่งจะช่วยลด ถึงเวลาแก้ไขครั้งแรก
โลก การนำทางด้วยดาวเทียมตามที่คุณเข้าใจ เคลื่อนที่ช้ามากและอยู่ภายใต้การมีอยู่ของกลุ่มดาวขนาดใหญ่ที่รัฐที่ใหญ่ที่สุดและร่ำรวยที่สุดขึ้นสู่วงโคจร ซึ่งหมายความว่าไม่มีบริษัทใดสามารถสร้างขั้นตอนทางเทคโนโลยีที่สำคัญในการแข่งขันเพื่อความแม่นยำได้ และในทางกลับกัน แผนสำหรับอนาคตของส่วนประกอบนี้เป็นที่รู้กันมานานแล้ว
การทำความเข้าใจหลักการทำงานของระบบนำทางและการทำงานที่ถูกต้องเป็นกุญแจสำคัญสู่การทำงานที่ประสบความสำเร็จ
เบื้องหลังตัวย่อลึกลับ GPS นั้นมี Global Positioning System ซึ่งเป็นระบบระบุตำแหน่งบนพื้นโลก ในขั้นต้น โครงการนี้ถูกสร้างและใช้งานโดยกองทัพสหรัฐฯ เพื่อระบุพิกัดแบบเรียลไทม์ทุกที่ในโลก และถูกเรียกว่า Navstar (ระบบนำทางพร้อมจังหวะเวลาและช่วง) ในขณะที่ตัวย่อ GPS ปรากฏในภายหลัง
ข้อความความสมบูรณ์จะปรากฏขึ้นเพื่อหลีกเลี่ยงข้อผิดพลาดในการกำหนดตำแหน่ง และอัตราการส่งข้อมูลที่เพิ่มขึ้นจะช่วยให้สามารถส่งข้อความความปลอดภัย สภาพอากาศ การอัปเดตแผนที่ และการอ่านข้อมูลการจราจรทั่วโลกหรือในท้องถิ่นได้ 
อย่างไรก็ตาม มันเป็นองค์ประกอบสำคัญที่จะเพิ่มความซ้ำซ้อนและความแม่นยำของระบบระบุตำแหน่งดาวเทียม
จีพีเอสทำงานอย่างไร
การทำงานของระบบนำทางใด ๆ จะขึ้นอยู่กับหลักการของสามเหลี่ยมเช่น การกำหนดตำแหน่งของวัตถุด้วยช่วงสูงสุดสามจุดที่ทราบในอวกาศ
เพื่อความง่าย เราจะถือว่าเรามีดาวเทียมประจำที่ 3 ดวง และเรารู้พิกัดของพวกมันด้วยความแม่นยำสูง จากนั้น โดยการวิเคราะห์เวลาการแพร่กระจายของสัญญาณวิทยุที่ปล่อยออกมาพร้อมกัน เราจะกำหนดพิกัดของเราใน พื้นที่สามมิติ- ระยะไปยังเป้าหมายถูกกำหนดในเรดาร์เมื่อต้นศตวรรษที่ 20 โดยการวิเคราะห์เวลาที่มาถึงของสัญญาณวิทยุที่สะท้อนจากวัตถุ และใช้หลักการเดียวกันนี้ในระบบนำทางด้วยดาวเทียม
ทีมยุโรปที่จดสิทธิบัตรอยู่ในรางวัลสุดท้ายของสำนักงานสิทธิบัตรยุโรป ปัจจุบัน เครื่องมือจำนวน 4 พันล้านเครื่องใช้ข้อมูลจากระบบดาวเทียมนำทางทั่วโลก การเติบโตนี้เกิดจากความสำเร็จที่เพิ่มขึ้นของแอปพลิเคชันใหม่ๆ ที่นอกเหนือไปจากการวางตำแหน่งและการนำทางที่เรียบง่าย
ผู้ชนะรางวัลรุ่นที่ 12 ซึ่งก่อตั้งโดยสำนักงานสิทธิบัตรยุโรป จะมีการประกาศผลในระหว่างพิธีที่จะจัดขึ้นที่เมืองเวนิสในวันที่ 15 มิถุนายน กลุ่มดาวกาลิเลโอแตกต่างจากรุ่นก่อนๆ ไม่มีรากฐานมาจากโลกการทหาร และบริการส่วนใหญ่มุ่งเป้าไปที่การใช้งานของพลเรือน
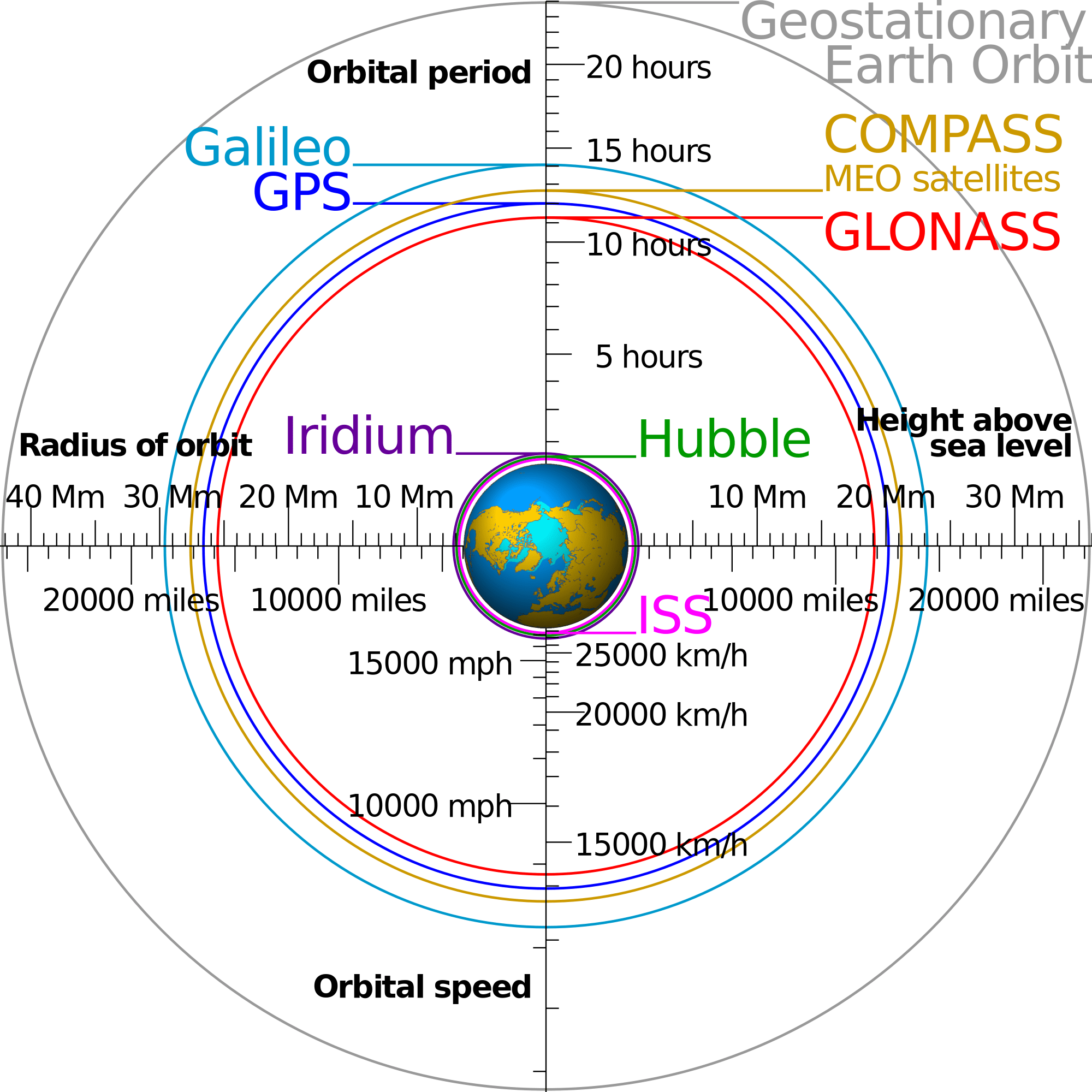
น่าเสียดายที่นี่คือจุดสิ้นสุดของความคล้ายคลึงกันระหว่างระบบระบุตำแหน่งแบบเดิมและระบบระบุตำแหน่งผ่านดาวเทียม ในชีวิตจริง ดาวเทียมเคลื่อนที่ด้วยความเร็วมหาศาลในวงโคจรที่ระดับความสูงประมาณ 20,000 กม. ดังนั้นบนโลกเราจึงไม่ทราบเวลาของการแผ่รังสีซิงโครนัสจากดาวเทียมและพิกัดของมัน
เพื่อแก้ไขข้อขัดแย้งเหล่านี้ นักพัฒนาจึงตัดสินใจติดตั้งบนดาวเทียม นาฬิกาอะตอม- มีความแม่นยำและมีราคาแพงมาก มีราคาประมาณ 100,000 ดอลลาร์ และดาวเทียมแต่ละดวงมี 4 ดวงเพื่อให้มั่นใจถึงการทำงานที่เชื่อถือได้ ดังนั้นปัญหาของการซิงโครไนซ์ (ปัญหาการแผ่รังสีสัญญาณวิทยุพร้อมกัน) จากดาวเทียมจึงได้รับการแก้ไข
นอกจากนี้ ยังนำเสนอขีดความสามารถด้านการค้นหาและกู้ภัยทั่วโลก ซึ่งจะทำให้บริการทางการแพทย์และกู้ภัยสามารถค้นหาผู้ที่ต้องการความช่วยเหลือได้ดีขึ้น และมอบการดูแลที่รวดเร็วยิ่งขึ้น ความก้าวหน้าล่าสุดในเทคโนโลยีอัตโนมัติและแนวโน้มในโลกของแอปพลิเคชันที่นำเสนอบริการระบุตำแหน่งทางภูมิศาสตร์บ่งบอกถึงทิศทางนั้น เทคโนโลยีการนำทางและตำแหน่งดาวเทียม
เพื่อตอบสนองความต้องการที่เพิ่มขึ้นเหล่านี้ จำเป็นต้องมีความแม่นยำในการกำหนดตำแหน่งมากขึ้น นี่หมายถึงวิธีการใหม่ในการส่งสัญญาณวิทยุที่ใช้ งานในการหาแนวทางแก้ไขได้รับมอบหมายให้เป็นทีมงานที่ประกอบด้วย Lestarquit และ Avila Rodriguez พร้อมด้วยครูชาวเยอรมัน Günter Hein วิศวกรชาวฝรั่งเศส-เบลเยียม Lionel Rice และทีมงานจากหน่วยงานอวกาศของฝรั่งเศสที่นำโดย Jean-Luc Isclair
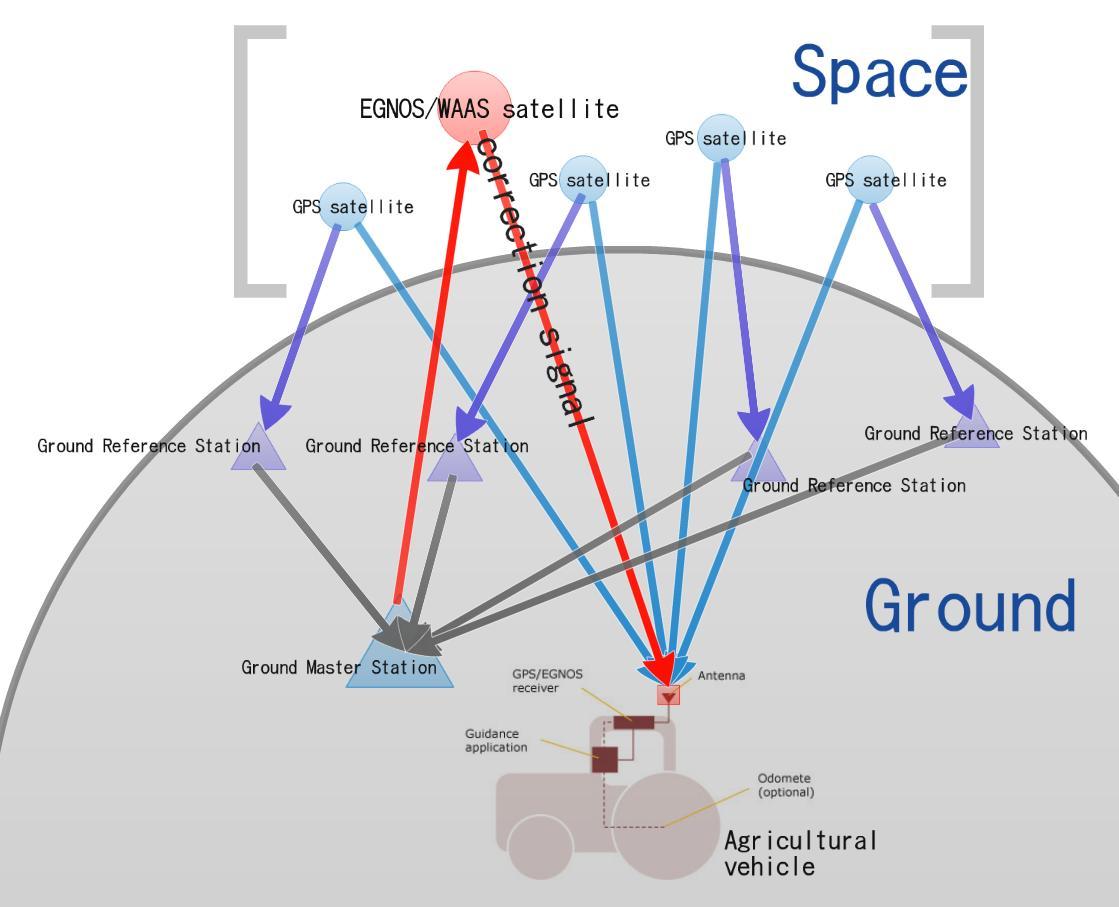
ปัญหาในการระบุตำแหน่งของดาวเทียมในวงโคจรได้รับการแก้ไขโดยการส่งข้อมูลเกี่ยวกับวงโคจรจากสถานีติดตามภาคพื้นดินไปยังศูนย์ควบคุมซึ่งมีการคำนวณองค์ประกอบวิถีโคจรที่ละเอียดแล้ว พารามิเตอร์ที่ระบุจะถูกป้อนลงในปูมและส่งไปยังดาวเทียม จากนั้นจะส่งข้อมูลนี้ไปยังเครื่องรับปฏิบัติการทั้งหมด ในการติดตามวงโคจรและพิกัดของดาวเทียม มีสถานีติดตามภาคพื้นดิน 4 สถานี ได้แก่
สัญญาณนี้ถูกสร้างขึ้นโดยการเขียนชุดย่อยสองชุด ซึ่งเป็นแถบแคบ ค่อนข้างใช้งานง่าย ระบบที่ทันสมัยการรับสัญญาณและแบนด์วิธที่กว้างขึ้นออกแบบมาสำหรับเทคโนโลยีระดับไฮเอนด์รุ่นต่อไป Avila Rodriguez ตั้งข้อสังเกตว่าแนวคิดนี้ช่วยให้มีความยืดหยุ่นมากขึ้น เพื่อให้ผู้ผลิตเครื่องรับสามารถตัดสินใจได้ว่าจะใช้สัญญาณเพียงบางส่วนหรือใช้สัญญาณทั้งหมดเพื่อให้ได้ตำแหน่งที่มีความแม่นยำสูงมาก
ในเวลาเดียวกัน Lestarquit วางปัญหาในการเพิ่มความแม่นยำโดยการลดการใช้พลังงานอันมีค่าที่จำเป็นในการส่งสัญญาณจากดาวเทียม จากนั้นเขาได้พัฒนาเทคนิคการมอดูเลชั่นที่เรียกว่า Alternative Binary Shifting Carrier ซึ่งรวมเอาสัญญาณสี่ประเภทเข้าไว้ในสัญญาณที่ซับซ้อนมากขึ้น
ระบบการสื่อสารและศูนย์ควบคุมที่ควบคุมโดยกระทรวงกลาโหมสหรัฐอเมริกา เมื่อคำนึงถึงความจริงที่ว่าการบินที่ระดับความสูง 20,000 กม. เกิดขึ้นในอวกาศที่ไม่มีอากาศจึงอธิบายได้อย่างแม่นยำสูงจากการพึ่งพาทางคณิตศาสตร์ เมื่อคำนึงถึงทั้งหมดข้างต้นแล้ว ปัญหาในการระบุตำแหน่งของดาวเทียมในวงโคจรก็ได้รับการแก้ไขแล้ว
และเครื่องรับรุ่นเก่าสามารถใช้สัญญาณตัวใดตัวหนึ่งเพื่อระบุจุดที่มีความแม่นยำน้อยกว่าหนึ่งเมตร ระบบดาวเทียมนำทางทั่วโลก ระบบสากลการวางตำแหน่ง เป็นระบบที่ให้ผู้ใช้สามารถค้นหาความครอบคลุมทั่วโลกของดาวเทียมบนโลกได้ ผู้ใช้บริการนี้ใช้วิทยุอิเล็กทรอนิกส์ขนาดเล็กเพื่อคำนวณตำแหน่งด้วยความแม่นยำหลายสิบถึงเมตร ความแม่นยำในการใช้งานเฉพาะทางหรือทางวิทยาศาสตร์อาจมีตั้งแต่ไม่กี่เซนติเมตรไปจนถึงมิลลิเมตร
ชื่อเริ่มต้น หลักการวัด สถานะการปล่อยดาวเทียม จำนวนดาวเทียม การติดตามขั้วโลก ความก้าวหน้าของจำนวนเอียงของแถบขั้วโลก ความสูงของวงโคจรของระยะเวลาการโคจรที่วางแผนไว้ในบริการขนส่ง Doppler ค่าที่วัดได้คือระยะเวลาการส่งสัญญาณจาก จานดาวเทียมถึง รับเสาอากาศ- เวลาที่วัดได้จะถูกแปลงเป็นระยะทางตามความเร็วของการแพร่กระจายสัญญาณ การวัดเวลาใช้นาฬิกาอะตอมเพื่อกำหนดเวลาที่เรียกว่าเวลาอะตอมจากความถี่อะตอม ซึ่งเป็นอิสระจากการหมุนของโลกโดยสิ้นเชิง
ยังคงแก้ไขปัญหาการกำหนดเวลาที่แน่นอนในพื้นดิน เครื่องรับ GPS-สัญญาณ. ความจริงก็คือนาฬิกาของเราในเครื่องรับสัญญาณ GPS มีข้อผิดพลาดอย่างมากในการวัดเวลาเมื่อเทียบกับความเร็วของการแพร่กระจายของสัญญาณวิทยุในอวกาศ
เพื่อแก้ไขปัญหานี้ จึงมีการใช้สัญญาณจากดาวเทียมดวงที่สี่ ลองดูที่รูป. 1.
โดยทั่วไป มีสองวิธีหลักในการรับเวลา: การเคลื่อนที่ของโลกและความถี่ของอะตอม ตำแหน่งสำหรับ พิกัด 3 มิติต้องมีดาวเทียมอย่างน้อย 4 ดวง ส่วนอวกาศ - ระบบดาวเทียม ส่วนควบคุม: - สถานีควบคุม ส่วนควบคุมจะควบคุมส่วนอวกาศ ควบคุมดาวเทียม การซ้อมรบ และรักษานาฬิกาอะตอม ส่วนผู้ใช้ - ผู้ใช้ที่มีอุปกรณ์ เครื่องรับประกอบด้วยเสาอากาศ หน่วย RF ไมโครโปรเซสเซอร์ หน่วยสื่อสาร หน่วยความจำ และแหล่งจ่ายแรงดันไฟฟ้า
หากทราบระยะทาง A ถึงดาวเทียมหนึ่งดวง พิกัดของเครื่องรับก็ไม่สามารถระบุได้ (สามารถระบุตำแหน่งที่จุดใดก็ได้บนทรงกลมรัศมี A ที่อธิบายไว้รอบ ๆ ดาวเทียม) ให้ทราบระยะห่าง B ของเครื่องรับจากดาวเทียมดวงที่สอง ในกรณีนี้ ไม่สามารถระบุพิกัดได้ - วัตถุนั้นอยู่ที่ไหนสักแห่งบนวงกลม (แสดงเป็นสีน้ำเงินในรูปที่ 1) ซึ่งเป็นจุดตัดของทรงกลมสองทรงกลม ระยะห่าง C ถึงดาวเทียมดวงที่สามจะช่วยลดความไม่แน่นอนในพิกัดลงเหลือสองจุด (ระบุด้วยจุดสีน้ำเงินหนาสองจุดในรูปที่ 1) นี่เพียงพอที่จะกำหนดพิกัดได้อย่างชัดเจน - ความจริงก็คือจากตำแหน่งที่เป็นไปได้สองจุดของเครื่องรับมีเพียงจุดเดียวเท่านั้นที่ตั้งอยู่บนพื้นผิวโลก (หรือในบริเวณใกล้เคียง) และจุดที่สองเป็นเท็จ ปรากฏว่าอยู่ลึกลงไปในโลกหรืออยู่สูงเหนือพื้นผิวโลกมาก ดังนั้นตามทฤษฎีแล้วสำหรับการนำทางสามมิติก็เพียงพอที่จะทราบระยะทางจากเครื่องรับถึงดาวเทียมสามดวง แต่จำเป็นต้องแก้ไขเวลาในเครื่องรับ GPS ดังนั้นเมื่อได้รับสัญญาณจากดาวเทียมสี่ดวง (หรือมากกว่า) ( ข้อมูลวงกลมจะไม่แสดงในรูปเพื่อไม่ให้ภาพเกะกะ) ผู้รับจะค้นหาจุดตัดของทรงกลมที่สอดคล้องกัน หากไม่มีจุดดังกล่าว ตัวประมวลผลตัวรับจะเริ่มปรับนาฬิกาโดยใช้การประมาณต่อเนื่องกันจนกระทั่งถึงจุดตัดของทรงกลมทั้งหมดที่จุดหนึ่ง
อากาศ เรือ การทำแผนที่ เวลา การวัด พื้นที่ การนำทาง การเดินทาง ตามสัญญาณที่ได้รับ: รหัส เฟส ขึ้นอยู่กับจำนวนดาวเทียมที่ได้รับ: หนึ่งช่องขึ้นไปตามความแม่นยำ การขนส่งทางถนน - การติดตามตำแหน่งยานพาหนะ - การตรวจสอบส่วนประกอบแต่ละส่วนของระบบกู้ภัยในบริบทของการจัดการภาวะวิกฤติ - การนำทางของผู้ขับขี่ ระบบการขนส่งอัจฉริยะ เครือข่ายการขนส่งการเข้าพัก การขนส่งทางรถไฟ การตรวจสอบตำแหน่งรถไฟ การขนส่งทางน้ำ - การนำทางทางเรือ การขนส่งทางอากาศ- มีแนวโน้ม
ที่สำคัญที่สุด:
1. ในการกำหนดพิกัดของวัตถุ GPS จะต้อง "เห็น" ดาวเทียมอย่างน้อยสี่ดวง
2. ยิ่งดาวเทียมที่เครื่องรับ "มองเห็น" มากเท่าไรก็ยิ่งกำหนดพิกัดได้แม่นยำมากขึ้นเท่านั้น
ความแม่นยำในการระบุพิกัดในระบบ GPS
ข้อได้เปรียบที่ไม่อาจปฏิเสธได้ของ GPS คือความแม่นยำสูงในการกำหนดพิกัด โดยไม่คำนึงถึงตำแหน่งของวัตถุตรวจสอบบนพื้น ความจริงก็คือเพื่อให้แน่ใจว่ามีการดำเนินการทั่วโลก มีดาวเทียม 24 ดวงอยู่ในวงโคจรตลอดเวลา ซึ่งอยู่ในวงโคจรที่มีความโน้มเอียงที่แตกต่างกัน และในทางทฤษฎีทำให้มั่นใจได้ว่าจะมองเห็นได้ทุกที่ในโลก เพื่อแก้ปัญหานี้ ก็เพียงพอแล้วที่จะมีดาวเทียม 18 ดวงในวงโคจร แต่ได้ตัดสินใจใช้ 24 ดวงเพื่อเพิ่มความแม่นยำในการกำหนดพิกัดของดาวเทียมด้วยตนเอง
ประสานงานการกระจายหน่วยงานที่เป็นธรรม นักโบราณคดีระบุการค้นพบใหม่ๆ นักพฤกษศาสตร์นำชุมชนพืชอันทรงคุณค่ามาสู่แผนที่พฤกษศาสตร์ นักชาติพันธุ์วิทยาศึกษาเส้นทางการอพยพของสัตว์ แนวคิดหลักประการหนึ่งของ geocaching คือการวางแคชในสถานที่ที่น่าสนใจและนักท่องเที่ยวยังไม่ได้ไปเยี่ยมชม Cache อธิบายไซต์พร้อมคุณสมบัติและความอยากรู้ แคชยังตั้งอยู่ในสถานที่ที่น่าสนใจซึ่งมีผู้เยี่ยมชมมากที่สุด
ระบบดาวเทียมอวกาศทางการทหารที่ดำเนินการโดยกระทรวงกลาโหมสหรัฐอเมริกา ในช่วงสงครามอ่าว ข้อผิดพลาดในการนำเข้าเทียมชั่วคราวได้รับอนุญาตให้ป้องกันการใช้ขีปนาวุธในทางที่ผิด
ความแม่นยำในการกำหนดพิกัดในระบบ GPS ขึ้นอยู่กับพารามิเตอร์หลายตัว ขึ้นอยู่กับทั้งพารามิเตอร์ทางกายภาพ (โดยเฉพาะอัตราส่วนสัญญาณต่อเสียงรบกวนในสัญญาณที่ได้รับ ดูด้านล่าง) และตำแหน่งเจ้าของระบบ (สหรัฐอเมริกา) ระบบ GPS มีโหมดความพร้อมใช้งานแบบเลือกได้ (SA - ความพร้อมใช้งานแบบเลือกได้) ซึ่งเป็นข้อผิดพลาดที่เกิดขึ้นกับสัญญาณดาวเทียมเพื่อใช้งานเครื่องรับ GPS พลเรือนอย่างไม่ถูกต้อง ซึ่งสหรัฐฯ ดำเนินการระหว่างปฏิบัติการพายุทะเลทรายในอิรัก ในรูป รูปที่ 2 แสดงกราฟสำหรับระบุข้อผิดพลาดทั้งในโหมดข้อผิดพลาดแบบเลือกและไม่มีข้อผิดพลาด
ส่วนผู้ใช้ ซอฟต์แวร์อุปกรณ์ ข้อจำกัดเหล่านี้มีพื้นฐานมาจากการป้องกันการใช้ระบบการวางแนวอวกาศในทางที่ผิดที่เป็นไปได้ในอาวุธที่คล้ายกับขีปนาวุธหรือขีปนาวุธพื้นเรียบ ระบบจะประกอบด้วยดาวเทียมปฏิบัติการ 30 ดวงที่โคจรรอบประมาณ 23,000 กิโลเมตรเหนือพื้นผิวโลก โดยเอียง 56° กับเส้นศูนย์สูตรของโลกในระนาบ 3 ลำซึ่งชดเชยกัน 60° ซึ่งกันและกัน แต่ละแทร็กจะมีตำแหน่งดาวเทียม 9 ตำแหน่งและตำแหน่งคุณภาพ 1 ตำแหน่ง สำเนาสำรองเพื่อให้สามารถเพิ่มระบบได้อย่างรวดเร็วเมื่อดาวเทียมล่ม
ความแม่นยำในการกำหนดพิกัดยังขึ้นอยู่กับ:
- จากสถานะของบรรยากาศและบรรยากาศรอบนอกเนื่องจากความเร็วของการแพร่กระจายของสนามแม่เหล็กไฟฟ้าจะคงที่ในสุญญากาศเท่านั้นและสื่อการแพร่กระจายใด ๆ ทำให้เกิดการเปลี่ยนแปลงความเร็วของการแพร่กระจายของสัญญาณวิทยุ
- จากการแพร่กระจายสัญญาณวิทยุแบบ "หลายทาง"
- จากตำแหน่งสัมพัทธ์ของดาวเทียมบนท้องฟ้าที่เรียกว่า "GDOP" (ปัจจัยการลดความแม่นยำทางเรขาคณิต)
- ตั้งแต่การประมวลผลทางคณิตศาสตร์บนดาวเทียมและอื่นๆ อีกมากมาย
เมื่อพิจารณาถึงสิ่งที่กล่าวมาทั้งหมดแล้ว ตัวรับสัญญาณ GPS อาจหยุดการระบุตำแหน่งใกล้กับอาคารสูงใกล้เคียง (เรียกว่าบ่อน้ำในเมือง) ในป่าสนหนาทึบ และแน่นอน ภายในอาคารถาวรหรือโรงจอดรถโลหะ หรือ โรงเก็บเครื่องบิน
วิถีโคจรถูกชดเชย 120° จากกันและกัน และสำหรับดาวเทียมนั้นมีดาวเทียมสมมาตร 45° แปดดวง ซึ่งทั้งหมดมีความสามารถในการปฏิบัติงานเต็มรูปแบบ ซึ่งเป็นสถานะที่ดาวเทียมอย่างน้อย 24 ดวงทำงานได้อย่างสมบูรณ์ และสนับสนุนเทคโนโลยีใหม่ๆ
รับสัญญาณจากดาวเทียมและคำนวณการปรับที่ส่ง บทที่ 2: การกำหนดตำแหน่ง หน้า 8 ดาวเทียมส่งข้อมูลเกี่ยวกับตำแหน่งและเวลาในการส่งสัญญาณ เครื่องรับจะคำนวณตำแหน่งเป็นเศษส่วนของความเร็วการแพร่กระจายของคลื่นวิทยุและเวลาที่ผ่านไประหว่างการส่งข้อมูลจากดาวเทียมและช่วงเวลาที่รับสัญญาณ
บริษัทรักษาความปลอดภัยเอกชนบางแห่งอ้างว่ามีความเป็นไปได้ในการปกป้องชีวิตและสุขภาพของพลเมืองจากการถูกโจมตีโดยใช้ตัวรับสัญญาณ GPS + โทรศัพท์มือถืออย่างไรก็ตาม ผู้ใช้เหล่านี้ต้องจำไว้ว่า เป็นไปไม่ได้ที่จะระบุตำแหน่งของบุคคลที่ใช้ GPS ภายในอาคาร ทางเข้า ในการขนส่ง (เช่น ที่ซึ่งการโจมตีมักเกิดขึ้นบ่อยที่สุด)
สถานีอ้างอิงจะเน้นตำแหน่งและให้ข้อมูลเกี่ยวกับข้อผิดพลาดของรถแลนด์โรเวอร์ ตัวรับสัญญาณใหม่ส่วนใหญ่สามารถทำงานร่วมกับระบบได้ ทั้งสองค่าให้การวัด 95% โดยมีข้อผิดพลาดแนวนอนน้อยกว่า 3 เมตร การเชื่อมต่อกับการ์ด เซิร์ฟเวอร์ผ่านข้อมูลมือถือ
ปราก สำนักงานใหญ่ของ European Global Navigation Satellite System Agency หน่วยงานระบบดาวเทียมนำทางทั่วโลกของยุโรปจะเปิดทำการใน Holesovice ในวันศุกร์และวันเสาร์ ขอเชิญผู้ชื่นชอบอวกาศและเทคโนโลยีอวกาศทุกคนเข้าร่วมงาน Open Day ตามที่ผู้จัดงานจัด เด็กและผู้ใหญ่จะเข้ามาเอง
ความแม่นยำที่แท้จริงของการกำหนดพิกัดในระบบ GPS ในสภาวะของรัสเซียคือ 10-25 ม. โดยธรรมชาติแล้วความแม่นยำนี้ไม่ใช่ค่าสูงสุดที่ทำได้สำหรับระบบ GPS โดยใช้วิธีการกำหนดส่วนต่างความแม่นยำสามารถเข้าถึงได้ 10 ซม. หรือน้อยกว่า แต่เราต้องทำ พูดคุยเกี่ยวกับระบบที่ใช้จริงในแผนกรักษาความปลอดภัย
ที่สำคัญที่สุด:
- ระบบนำทาง GPS มีเอกลักษณ์เฉพาะด้วยความแม่นยำสูงในการกำหนดพิกัด (ประมาณ 10-25 ม.) โดยไม่คำนึงถึงระยะห่างของวัตถุรักษาความปลอดภัยจากสถานีตรวจสอบและเวลาการเคลื่อนที่ของวัตถุ
- เจ้าของระบบ (สหรัฐอเมริกา) สามารถลดความแม่นยำในการกำหนดพิกัดลงจนไม่สามารถกำหนดพิกัดได้อย่างสมบูรณ์
- เครื่องรับ GPS อาจหยุดการระบุตำแหน่งใกล้กับอาคารสูงใกล้เคียง (เรียกว่าบ่อน้ำในเมือง) ในป่าสนหนาทึบ และแน่นอนภายในอาคารถาวร โรงจอดรถโลหะ หรือโรงเก็บเครื่องบิน
การป้องกันเสียงรบกวนของระบบ GPS
การป้องกันเสียงรบกวนของระบบ GPS จากมุมมองของการใช้งานในระบบรักษาความปลอดภัย ความจริงก็คือกำลังส่งของดาวเทียมถูกจำกัดไว้ที่ 50 วัตต์สำหรับช่วงการแผ่รังสี L1 และ 8 วัตต์สำหรับช่วง L2 และความสูงของดาวเทียมอยู่ที่ประมาณ 20,000 กม.
ดังนั้นจึงไม่ยากที่จะเข้าใจว่าความหนาแน่นของฟลักซ์มีน้อยเพียงใด รังสีแม่เหล็กไฟฟ้ามาที่เสาอากาศ GPS การคำนวณทางเรขาคณิตอย่างง่ายแสดงให้เห็นว่าด้วยความกว้างของรูปแบบเสาอากาศส่งสัญญาณที่ 2° และความสูงของดาวเทียมเหนือพื้นผิวโลก 20,000 กม.
การไหลของรังสีแม่เหล็กไฟฟ้าตกลงบนวงกลมที่มีเส้นผ่านศูนย์กลาง 700 กม. สถานการณ์นี้จะได้รับการช่วยเหลือเล็กน้อยจากช่วงการแผ่รังสีกิกะเฮิรตซ์ (โดยเพิ่มขึ้น ความถี่ในการทำงานระดับเสียงรบกวนในสิ่งแวดล้อมจะลดลง) แต่ในขณะเดียวกันก็มีการกำหนดข้อจำกัดว่าคลื่นแม่เหล็กไฟฟ้าสามารถโค้งงอรอบสิ่งกีดขวางได้อย่างไร การแพร่กระจายของคลื่นแม่เหล็กไฟฟ้าในช่วงนี้เกิดขึ้นเกือบเป็นเส้นตรง
จุดต่อไปที่มักถูกมองข้าม: เครื่องรับ GPS จะกำหนดพิกัด ณ ตำแหน่งนั้น และข้อมูลเกี่ยวกับพิกัดจะต้องถูกส่งไปยังสถานีตรวจสอบ ตามกฎแล้วจะใช้เครือข่ายเพื่อสิ่งนี้ การสื่อสารเคลื่อนที่หรือช่องวิทยุ VHF พร้อมผลที่ตามมาทั้งหมด
เครือข่ายเซลลูล่าร์ติดขัดได้ง่ายผู้ใช้ขึ้นอยู่กับคุณภาพของบริการที่ให้ไว้โดยสิ้นเชิง บริษัทมือถือซึ่งโดยทั่วไปแล้วจะไม่รับผิดชอบต่อความรวดเร็วในการส่งประกาศ ความน่าเชื่อถือของการสื่อสาร และลักษณะภาระผูกพันในระยะยาวต่อลูกค้า อย่างไรก็ตาม พื้นที่ครอบคลุมขนาดใหญ่และราคาอุปกรณ์ที่ต่ำ (แต่ไม่ใช่ราคาของการส่งพิกัดวัตถุปกติ) ถือเป็นคุณลักษณะที่น่าสนใจของโซลูชันนี้
ช่องวิทยุ VHF เป็นช่องทางการสื่อสารที่เชื่อถือได้มากกว่าเมื่อเปรียบเทียบกับ เครือข่ายโทรศัพท์เคลื่อนที่ไม่จำเป็นต้องมีตัวกลางในการส่งพิกัดระหว่างวัตถุความปลอดภัยและศูนย์ตรวจสอบ แต่มีลักษณะพิเศษคือพื้นที่ครอบคลุมที่เล็กกว่ามากและจำเป็นต้องมีทรัพยากรความถี่ของตัวเอง ซึ่งไม่ใช่เรื่องง่ายที่จะนำไปใช้เสมอไป ในกรณีนี้ ไม่จำเป็นต้องจ่ายค่าแลกเปลี่ยนการรับส่งข้อมูลระหว่างออบเจ็กต์ความปลอดภัยและสถานีตรวจสอบ
ที่สำคัญที่สุด:
ผู้ใช้จะต้องเข้าใจอย่างชัดเจนถึงข้อผิดพลาดทั้งหมดที่เกี่ยวข้องกับการใช้ระบบติดตาม GPS และจัดทำสัญญาการให้บริการแก่ลูกค้าอย่างมีความสามารถ ซึ่งจะต้องคำนึงถึงสถานการณ์เหตุสุดวิสัย
GPS หรือ Glonass
ถ้า GPS เป็นสากล ระบบกำหนดตำแหน่งผลิตในประเทศสหรัฐอเมริกา จากนั้น GLONASS (Global Navigation Satellite System) ผลิตในสหภาพโซเวียต-รัสเซีย ในช่วงเวลาที่มีความสุข สหภาพโซเวียตมีระบบนำทางด้วยดาวเทียมที่มีคุณสมบัติครบถ้วนซึ่งมีลักษณะเหมือนกับระบบระบุตำแหน่งของสหรัฐอเมริกาซึ่งใช้เพื่อวัตถุประสงค์ทางทหารเป็นหลัก
จากนั้น ในช่วงปีเปเรสทรอยกา ดาวเทียมส่วนใหญ่ในระบบ GLONASS พังหรือล้มเหลว และในปีที่เลวร้ายที่สุด แทนที่จะเป็นดาวเทียม 24 ดวง มีดาวเทียมเพียง 7 ดวงในวงโคจร ในปี พ.ศ. 2549 มีดาวเทียม 16 ดวงที่อยู่ในวงโคจร ซึ่งมีเพียง 9 ดวงเท่านั้นที่กำลังทำงานหรือจะปฏิบัติการในอนาคตอันใกล้นี้ (เนื่องจากดาวเทียมบางดวงอยู่ในขั้นตอนอายุการใช้งานหมดลงอย่างสมบูรณ์)
ในช่วงเริ่มต้นของการพัฒนาระบบนำทางด้วยดาวเทียมในรัสเซียสำหรับการใช้งานพลเรือนมีการเปิดตัวเครื่องรับการนำทางในตลาดซึ่งทำให้สามารถรับทั้งสัญญาณ GPS และ GLONASS ซึ่งถูกต้องอย่างไม่ต้องสงสัยเนื่องจากจำนวนดาวเทียมที่สามารถรับได้เป็นสองเท่า ซึ่งจะช่วยให้คุณเพิ่มความน่าจะเป็นในการระบุตำแหน่งและความแม่นยำของพิกัดได้
อย่างไรก็ตามเนื่องจากการที่ระบบ GLONASS เสียชีวิตในช่วงปลายทศวรรษที่ 90 ปัจจุบันมีเพียงตัวรับสัญญาณระบบ GPS เท่านั้นในตลาดเสรีของรัสเซีย แต่ไม่ใช่ทุกอย่างจะแย่อย่างที่คิด
ประธานาธิบดีรัสเซีย วลาดิมีร์ ปูติน ระบุว่าการฟื้นฟูระบบนำทาง GLONASS เป็นโครงการระดับชาติที่มีความสำคัญอันดับแรก และในปี 2550 มีการวางแผนที่จะมีดาวเทียมปฏิบัติการ 18 ดวงในวงโคจร และภายในปี 2553 - 24 ดาวเทียม ซึ่งจะลดการพึ่งพาดังกล่าว ปัญหาสำคัญ, ยังไง คำจำกัดความสากลพิกัด (โดยเฉพาะสำหรับการใช้งานพลเรือนและแผนก*) จากความประสงค์ของสหรัฐอเมริกา
(*ผู้อ่านอาจรู้สึกว่าปัจจุบันกองทัพรัสเซียไม่สามารถระบุพิกัดของตนได้ ซึ่งไม่เป็นความจริงทั้งหมด การนำทางทางทหารมักจะใช้ระบบสำรอง เช่น ระบบนำทางที่ใช้บีคอนวิทยุ ไจโรสโคปแบบกลไก วงแหวน ไจโรสโคปเลเซอร์ระบบที่บันทึกการเปลี่ยนแปลงในสนามแม่เหล็กโลกหรือหลักการอื่นที่ผู้เขียนไม่รู้จัก อย่างไรก็ตาม ระบบทั้งหมดนี้มีราคาที่สูง ความแม่นยำในการกำหนดพิกัดต่ำกว่ามาก (อาจยกเว้นระบบที่ใช้ไจโรสโคปแบบวงแหวนเลเซอร์) และแนวโน้มความแม่นยำในการกำหนดพิกัดที่ขึ้นอยู่กับเวลาของการเคลื่อนที่ ของวัตถุ (ผลของการสะสมข้อผิดพลาด)
จากทั้งหมดที่กล่าวมา ระดับการนำทางด้วยวิธีเหล่านี้จำกัดอยู่ที่ระดับเท่านั้น อากาศยาน(เครื่องบิน เฮลิคอปเตอร์) และการใช้ระบบนำทางด้วยดาวเทียมทำให้คุณสามารถติดตามตำแหน่งด้วยต้นทุนวัสดุที่ค่อนข้างต่ำสำหรับวัตถุจำนวนมาก ลงไปจนถึงตำแหน่งของทหารแต่ละคนในการรบที่มากขึ้น ซึ่งกำลังดำเนินการใน สหรัฐอเมริกา (การสร้างแผนกที่เรียกว่า "คอมพิวเตอร์" ซึ่งได้ถูกสร้างขึ้นแล้วในสหรัฐอเมริกาสองแผนกดังกล่าว)
ที่สำคัญที่สุด:
- ปัจจุบันเครื่องรับ GPS ครองตลาดภายในประเทศ
- ผู้พัฒนาระบบนำทางรวมทั้งผู้ใช้จำเป็นต้องคำนึงถึงการใช้ระบบ GPS และ GLONASS ร่วมกันในอนาคตอันใกล้นี้
- เมื่อเราสร้างสรรค์ผลงานให้สมบูรณ์ กลุ่มวงโคจรจำเป็นต้องเปลี่ยนไปใช้ระบบ GLONASS (อย่างไรก็ตาม จริง ๆ แล้วสามารถทำได้หากต้นทุนของตัวรับสัญญาณระบบ GLONASS เท่ากับหรือน้อยกว่าระบบ GPS โดยมีค่าประมาณเท่ากัน ข้อกำหนดทางเทคนิคเครื่องรับของทั้งสองระบบ)
ไม่ใช่เรื่องน่าละอายที่จะใช้เงินจาก Russian Stabilization Fund เพื่อสร้างระบบนำทางทั่วโลกภายในประเทศที่มีการแข่งขันอย่างแท้จริงแม้ว่านี่จะไม่ใช่หัวข้อของบทความนี้อีกต่อไปก็ตาม
ข้อสรุป:
- ระบบนำทางทั่วโลกเป็นหนึ่งใน ความสำเร็จล่าสุดความคิดทางวิศวกรรมสมัยใหม่และควรนำไปใช้อย่างจริงจังในการปฏิบัติของ OVO
- ระบบนำทางทั่วโลกไม่ใช่ยาครอบจักรวาลสำหรับความเจ็บป่วยทุกประเภท
- การใช้งานที่ไม่ยุติธรรมในเชิงเศรษฐกิจและไม่ยุติธรรมทางเทคนิคโดยไม่คำนึงถึงคุณสมบัติการทำงานของระบบนำทางสามารถนำไปสู่ความเสื่อมเสียในทิศทางนี้โดยสิ้นเชิงในสายตาของผู้บริโภค
บทความนี้จัดทำขึ้นร่วมกับบรรณาธิการนิตยสาร "ความปลอดภัย"
ปัจจุบันในโลกนี้มีระบบนำทางหลายระบบที่ใช้อยู่ ดาวเทียมประดิษฐ์โลก. แต่บริการระบุตำแหน่งทั่วโลกอย่างแท้จริงนั้นให้บริการได้เกือบทุกที่บนโลกของเราโดยมีเพียงสองระบบเท่านั้น: Russian GLONASS และ American GPS
ระบบกำหนดตำแหน่งบนพื้นโลก GPS
ระบบกำหนดตำแหน่ง GPS ของอเมริกาตามนั้นเอง ฟังก์ชั่นคล้ายกัน ระบบรัสเซียโกลนาส. วัตถุประสงค์หลักคือการกำหนดพิกัดของผู้ใช้บริการ ส่วนประกอบของเวกเตอร์ความเร็ว และการอ้างอิงมาตราส่วนเวลาของระบบด้วยความแม่นยำสูง
คล้ายกับในประเทศ, ระบบ GPSพัฒนาและจัดการโดยกระทรวงกลาโหมสหรัฐฯ เช่นเดียวกับระบบ GLONASS GPS ประกอบด้วย ส่วนพื้นที่คำสั่งภาคพื้นดินและการวัดที่ซับซ้อนและส่วนผู้บริโภค
ระบบนำทางด้วยดาวเทียมกาลิเลโอ
ในอีกไม่กี่ปีข้างหน้า สหภาพยุโรป (EU) และองค์การอวกาศยุโรป (ESA) วางแผนที่จะเริ่มใช้งานระบบนำทางด้วยดาวเทียมทั่วโลกใหม่ของยุโรป กาลิเลโอ (“กาลิเลโอ”) การมีอยู่ของระบบดาวเทียม GNSS ที่ปฏิบัติการเต็มรูปแบบระบบที่สองนั้นให้ประโยชน์อย่างมากแก่ลูกค้าพลเรือนทั่วโลก การเปิดตัวโครงการกาลิเลโอที่ประสบความสำเร็จจะเพิ่มจำนวนดาวเทียมนำทางที่ใช้งานได้มากกว่าสองเท่า ใช้ได้กับผู้ใช้- การเพิ่มจำนวนดาวเทียมดังกล่าวจะเป็นประโยชน์ไม่เพียงแต่เมื่อทำงานเท่านั้น โหมดออฟไลน์แต่จะปรับปรุงคุณภาพของการกำหนดตำแหน่งและความสามารถของอุปกรณ์ GPS ในการแก้ไขความคลุมเครือของเฟสพาหะสำหรับสัญญาณดาวเทียมที่ติดตาม
ลักษณะเปรียบเทียบ
ระบบนำทางภูมิภาคด้วยดาวเทียมอินเดีย
รัฐบาลอินเดียอนุมัติโครงการติดตั้งดาวเทียมของอินเดียเมื่อวันที่ 9 พฤษภาคม พ.ศ. 2549 ระบบภูมิภาคการเดินเรือ (IRNSS) ด้วยงบประมาณ 14.2 พันล้านรูปีในอีก 6-7 ปีข้างหน้า กลุ่มดาวดาวเทียม IRNSS จะประกอบด้วยดาวเทียมเจ็ดดวงในวงโคจรจีโอซิงโครนัส ดาวเทียมทั้งเจ็ดดวงจะมีการมองเห็นวิทยุอย่างต่อเนื่องกับสถานีควบคุมของอินเดีย
ส่วนภาคพื้นดินของ IRNSS จะมีสถานีตรวจสอบ สถานีสำรอง สถานีตรวจสอบและควบคุม ระบบออนบอร์ด- ISRO ของรัฐมีหน้าที่รับผิดชอบในการใช้งาน IRNSS ซึ่งจะอยู่ภายใต้การควบคุมของรัฐบาลอินเดียทั้งหมด เครื่องรับการนำทางที่จะรับสัญญาณ IRNSS จะได้รับการพัฒนาและผลิตโดยบริษัทอินเดียด้วย
ระบบดาวเทียมนำทางเข็มทิศจีน
ประเทศจีนเร็วที่สุด ประเทศกำลังพัฒนาของโลกก็เริ่มก่อสร้างระบบนำทางด้วยดาวเทียม Compass ของตัวเองด้วย
ส่วนอวกาศของระบบนำทางด้วยดาวเทียม Compass จะถูกสร้างขึ้นจากดาวเทียม 5 ดวงในวงโคจรธรณีสถานี (GSO) และดาวเทียม 30 ดวงในวงโคจรโลกขนาดกลาง
จะมีการให้บริการสองประเภท สัญญาณจะถูกส่งสำหรับการใช้งานทั่วไป โดยการประมวลผลจะให้ความแม่นยำของตำแหน่ง 10 ม. ความเร็ว 0.2 ม./วินาที และการกำหนดเวลาปัจจุบันด้วยความแม่นยำ 50 ns
ผู้ใช้จำนวนจำกัดจะมีโอกาสวัดผลได้แม่นยำยิ่งขึ้น
จีนต้องการร่วมมือกับประเทศอื่นๆ ในการพัฒนาระบบนำทางด้วยดาวเทียม เพื่อให้มั่นใจว่าเข็มทิศสามารถทำงานร่วมกับระบบนำทางอื่นๆ ทั่วโลกได้
ระบบนำทาง Quasi-Zenith ของญี่ปุ่น (QZSS)
QZSS ของญี่ปุ่นถือกำเนิดขึ้นในปี 2545 ในชื่อ ระบบการค้าด้วยบริการที่หลากหลายสำหรับการสื่อสารเคลื่อนที่ การแพร่ภาพกระจายเสียง และการใช้การนำทางอย่างแพร่หลายในญี่ปุ่นและพื้นที่ใกล้เคียงของเอเชียตะวันออกเฉียงใต้ การปล่อยดาวเทียมดวงแรกสำหรับ QZSS มีการวางแผนในปี พ.ศ. 2551 ในเดือนมีนาคม พ.ศ. 2549 รัฐบาลญี่ปุ่นประกาศว่าดาวเทียมดวงแรกจะไม่ได้รับการออกแบบสำหรับ ใช้ในเชิงพาณิชย์และจะเปิดตัวทั้งหมดด้วยเงินทุนงบประมาณเพื่อทดสอบการตัดสินใจเพื่อประโยชน์ในการแก้ปัญหาการเดินเรือ หลังจากการทดสอบดาวเทียมดวงแรกเสร็จสิ้นแล้วเท่านั้น ระยะที่สองจึงจะเริ่มต้นขึ้น และดาวเทียมต่อไปนี้จะให้บริการตามปริมาณที่วางแผนไว้ก่อนหน้านี้ได้อย่างเต็มที่