Глобальная навигационная спутниковая система гнсс. Глобальная навигационная спутниковая система (глонасс)
Е. Поваляев, С. Хуторной
Системы спутниковой навигации ГЛОНАСС и GPS.
Предлагаем Вашему вниманию статью, посвященную спутниковым радионавигационным системам Глонасс (глобальная навигационная спутниковая система) и GPS (Global Positioning System). В статье рассмотрены вопросы построения и функционирования систем, структура и функции аппаратуры потребителя (приемников), алгоритмы решения навигационной задачи и перспективы развития систем.
Напротив, Галилей должен быть гражданским. Проект будет находиться в Праге. Проект был назван в честь тосканского ученого Галилео Галилея, который также интересовался проблемами морского судоходства. Однако из этой финансовой модели инвесторы отказались от слишком большого риска.
Базовый сервис - базовый сигнал предоставляется бесплатно. Эта услуга будет разработана для важнейших транспортных сообществ, таких как авиация. Он будет сертифицирован в соответствии с Международными стандартами Международной организации гражданской авиации и Правилами открытого неба. Коммерческое обслуживание - в отличие от базовой службы, использует еще два сигнала. Доступ контролируется на уровне приемника, где используется ключ доступа. Услуга предназначена исключительно для пользователей, определенных правительством.
С давних времен путешественники задавались вопросом: как определить свое местоположение на Земле? Древние мореплаватели ориентировались по звездам, указывающим направление движения: зная среднюю скорость и время в пути, можно было сориентироваться в пространстве и определить расстояние до конечного пункта назначения. Однако погодные условия не всегда были на руку исследователям, поэтому сбиться с курса не представляло особого труда. С появлением компаса задача существенно упростилась. Путешественник уже в меньшей мере зависел от погоды.
Кроме того, он должен обеспечить возможность вызова экстренной помощи. Каждая из плоскостей будет 56 ° с плоскостью экватора, что упростит навигацию по навигационной системе до 75 ° широты. Большое количество спутников, три из которых будут выполнять резервное копирование, обеспечат надежную работу системы, даже если некоторые спутники перестанут работать должным образом.
Фактически, спутниковый сигнал не просто исчезает между зданиями, в замкнутых пространствах, в лесу, под землей или под морем - это было бы первым, что вышло бы из нашей жизни перед лицом серьезного международного кризиса. От дирижаблей до атомных подводных лодок.
Эра радио открыла новые возможности перед человеком. С появлением радиолокационных станций, когда стало возможным измерять параметры движения и относительное местоположение объекта по отраженному от его поверхности лучу радиолокатора, встал вопрос о возможности измерения параметров движения объекта по излучаемому сигналу. В 1957 году в СССР группа ученых под руководством В.А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Но, что самое главное, была установлена возможность решения обратной задачи - нахождения координат приемника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны . При движении по орбите спутник излучает сигнал определенной частоты, номинал которой известен на приемной стороне (потребитель). Положение ИСЗ в каждый момент времени известно, точнее, его можно вычислить на основании информации, заложенной в сигнале спутника. Пользователь, измеряя частоту пришедшего к нему сигнала, сравнивает еeс эталонной и таким образом вычисляет доплеровский сдвиг частоты, обусловленный движением спутника. Измерения производятся непрерывно, что позволяет составить своего рода функцию изменения частоты Доплера. В определeнный момент времени частота становится равной нулю, а затем меняет знак. В момент равенства нулю частоты Доплера потребитель находится на линии, которая является нормалью к вектору движения спутника. Используя зависимость крутизны кривой доплеровской частоты от расстояния между потребителем и ИСЗ и измерив момент времени, когда частота Доплера равна нулю, можно вычислить координаты потребителя.
История навигационных систем старше, чем может показаться на первый взгляд: они родились в Первой мировой войне для нужд командиров немецких дирижаблей, бомбардирующих темные ночи Англии. В это время две станции, удаленные друг от друга, транслировали сигнал, с которого передача одного показала направление, а второй сигнал пересек первый на определенном угле выше целевого местоположения.
Точность навигационных систем. Проблема инерционной навигации заключается в том, что ее точность быстро снижается со временем, прошедшим с момента отказа спутникового сигнала. Постепенно он был улучшен, и он начал исчезать с появлением спутников. Недавно он был заинтересован в нем - особенно в контексте рисков безопасности. Однако наземные радиосистемы не слишком точны и для охвата больших площадей требуется большое количество передатчиков и передающих мачты. Поэтому они являются дорогостоящими и, более того, относительно уязвимыми.
Таким образом, искусственный спутник Земли становится радионавигационной опорной станцией, координаты которой изменяются во времени вследствие движения спутника по орбите, но заранее могут быть вычислены для любого момента времени благодаря эфемеридной информации, заложенной в навигационном сигнале спутника.
В 1958√1959 гг. в Ленинградской военно-воздушной инженерной академии (ЛВВИА) им. А.Ф. Можайского, Институте теоретической астрономии АН СССР, Институте электромеханики АН СССР, двух морских НИИ и Горьковском НИРФИ проводились исследования по теме "Спутник", ставшие впоследствии основой для построения первой отечественной низкоорбитальной навигационной спутниковой системы "Цикада". И в 1963 году начались работы по построению этой системы. В 1967 году на орбиту был выведен первый отечественный навигационный спутник "Космос-192". Характерной чертой радионавигационных спутниковых систем первого поколения является применение низкоорбитальных ИСЗ и использование для измерения навигационных параметров объекта сигнала одного, видимого в данный момент спутника. В дальнейшем спутники системы "Цикада" были оборудованы приемной аппаратурой обнаружения терпящих бедствия объектов.
Это устройство с очень точными часами и набором акселерометров и гироскопов. Он работает, сохраняя последнее известное точное положение, определенное по-другому, из которого акселерометры времени измеряют скорость и гироскопы в направлении движения. Поэтому устройства, работающие с мощным компьютером, могут общаться в любое время независимо от внешних источников сигнала.
Инерционные навигационные системы стали применяться в основном на атомных подводных лодках в течение прошлого века. Они были сложными, большими, тревожными и не очень точными. Основным недостатком этих систем было то, что ошибки и отклонения постепенно накапливались и без частых поправок результаты стали непригодными после некоторого времени.
Параллельно с этим, после успешного запуска СССР первого искусственного спутника земли, в США в Лаборатории прикладной физики Университета Джона Гопкинса проводятся работы, связанные с возможностью измерения параметров сигнала, излучаемого спутником. По измерениям вычисляются параметры движения спутника относительно наземного пункта наблюдения. Решение обратной задачи - дело времени.
Независимая карта размера монет. Устройство больше не принимает форму большой коробки, требующей сильного источника питания, а чипа с размерами небольшой монеты. Он состоит из шести слоев, каждый из которых имеет толщину 50 микрон, что составляет примерно толщину человеческого волоса. На этих слоях печатаются схемы, заменяющие бывшие большие и ненадежные механические акселерометры и гироскопы с потреблением энергии всего 200 мВт.
Целью лабораторий разработки является миниатюризация инерциальных систем. Сообщается, что ошибка после ежечасного измерения меньше одной морской мили. Независимые навигационные системы должны также использовать дополнительные источники информации о местоположении, такие как магнитное поле Земли, радиовещание радио и телевизионных станций, мобильные сети и даже штормы. Некоторые источники также рассказывают о специальных скрытых передатчиках ближнего действия, которые будут развернуты в зонах интересов.
На основе этих исследований в 1964 году в США создается доплеровская спутниковая радионавигационная система первого поколения "Transit". Основное ее назначение - навигационное обеспечение пуска с подводных лодок баллистических ракет Поларис. Отцом системы считается директор Лаборатории прикладной физики Р. Кершнер. Для коммерческого использования система становится доступной в 1967 г. Так же, как и в системе "Цикада", в системе "Transit" координаты источника вычисляются по доплеровскому сдвигу частоты сигнала одного из 7 видимых спутников. ИСЗ систем имеют круговые полярные орбиты с высотой над поверхностью Земли ~ 1100 км, период обращения спутников "Transit" равен 107 минутам. Точность вычисления координат источника в системах первого поколения в большой степени зависит от погрешности определения скорости источника. Так, если скорость объекта определена с погрешностью 0,5 м, то это в свою очередь приведет к ошибке определения координат ~ 500 м. Для неподвижного объекта эта величина уменьшается до 50 м.
История китайской спутниковой навигации
Детали не говорят, потому что первыми инерциальными навигационными системами будут солдаты. До недавнего времени только у США и России были свои спутниковые навигационные системы. Недавно Китай присоединился к этой группе. Кроме того, есть много свидетельств того, что китайцы завершат свою систему быстрее, чем европейцы. Идея создания китайской спутниковой навигации родилась годами. Однако реальная работа над системой началась почти 20 лет спустя. Он состоял из 4 геостационарных спутников. Бейду-1 охватывал регион Юго-Восточной Азии.
Кроме того, в этих системах невозможен непрерывный режим работы. Ввиду того, что системы низкоорбитны, время, в течение которого спутник находится в поле видимости потребителя, не превышает одного часа. Кроме того, время между прохождением различных спутников зоны видимости потребителя зависит от географической широты, на которой он находится, и может составить величину от 35 до 90 минут. Уменьшение этого интервала путем наращивания числа спутников невозможно, потому что все спутники излучают сигналы на одной и той же частоте.
В настоящее время все спутники этой системы отключены. Была предложена даже финансовая поддержка в размере 230 миллионов евро. Официально из-за неудовлетворительной стороны китайского сотрудничества. Это будет система с глобальным охватом. Все действующие спутниковые навигационные системы имеют трехкомпонентную конструкцию. Китайская система не будет исключением. Здесь мы находим космический сегмент, пользователь и управление.
В настоящее время на орбите находятся 23 спутника, из которых 3 исключены. Спутниковый сигнал будет передаваться на следующих частотах. Это различные типы наземных станций, задачей которых является обеспечение надлежащего функционирования системы. Наиболее важными элементами контрольного сегмента являются.
Следовательно, спутниковые навигационные системы второго поколения обладают рядом существенных недостатков. В первую очередь - недостаточная точность определения координат динамичных объектов. К недостатку можно отнести также отсутствие непрерывности в измерениях.
Одной из основных проблем, возникающих при создании спутниковых систем, обеспечивающих навигационные определения по нескольким спутникам, является взаимная синхронизация сигналов (шкал времени) спутников с необ-ходимой точностью. Рассогласование опорных генераторов спутников на 10 нс приводит к ошибке в определении координат потребителя 10√15 м . Второй проблемой, с которой столкнулись разработчики при создании высокоорбитальных спутниковых навигационных систем, стало высокоточное определение и прогнозирование параметров орбит ИСЗ. Аппаратура приемника, измеряя задержки сигналов от разных спутников, вычисляет координаты потребителя.
Главная станция управления - отвечает за поддержание правильного созвездия спутников. Их задачей является непрерывный прием спутникового сигнала. . Станции, отправляющие китайскую навигацию по компасу. Китайская спутниковая навигация будет предлагать два уровня точности: общедоступные и зашифрованные. Кодированный сигнал будет предназначен для китайской армии. Вероятно, в будущем эта технология будет разработана для отправки более длинных сообщений.
Это позволит вам установить положение намного быстрее, особенно в городских и горных районах. По оценкам, китайские компании заработают еще 60 миллиардов долларов США в ближайшие пять лет. Спутниковая навигация - тип радионавигации с использованием радиоволн с искусственных спутников, с целью определения местоположения точек и движущихся приемников наряду с параметрами их перемещения в любом месте на поверхности Земли.
Для этих целей в 1967 году ВМС США была разработана программа, по которой был осуществлен запуск спутника TIMATION-I, а в 1969 году - спутника TIMATION-II. На борту этих спутников использовались кварцевые генераторы. В то же время, ВВС США параллельно вели свою программу по использовании широкополосных сигналов, модулированных псевдошумовым кодом (PRN). Корреляционные свойства такого кода позволяют использовать одну частоту сигнала для всех спутников, с кодовым разделением сигналов от различных спутников. Позднее, в 1973 году две программы были объединены в одну общую под названием "Navstar-GPS" . К 1996 году развертывание системы было завершено. В данный момент доступно 28 активных спутников.
Типы спутниковых навигационных систем
В морском, автомобильном, воздушном и железнодорожном транспорте спутниковая навигация используется для автоматической идентификации движущихся объектов, контроля их маршрутов и предупреждения о потенциальных опасностях. Обе системы работают по принципу пассивного измерения расстояния между приемником и спутниками. Метод измерения и работа системы аналогичны.
Система состоит из 30 спутников, расположенных на трех круговых орбитах. В Европе будут созданы два центра для контроля работы спутников. Коммерческим клиентам будет предоставлена топографическая съемка с точностью до 10 метров и скоростью с точностью до 0, 2 метров в секунду. Мы видим, как это работает на схеме, подготовленной производителем. В населенных пунктах спутниковый сигнал добирается до приемника как напрямую, так и от отражений - поэтому в разное время. Если сигналы накладываются, создается пузырь сигнала.
В СССР летные испытания высокоорбитальной спутниковой навигационной системы Глонасс начались в 1982 году запуском спутника "Космос-1413" . Основным разработчиком и создателем по системе в целом и по космическому сегменту является НПО прикладной механики (г. Красноярск), а по навигационным космическим аппаратам - ПО "Полет" (г. Омск). Головным разработчиком радиотехнических комплексов является РНИИКП; ответственным за создание временного комплекса, системы синхронизации и навигационной аппаратуры потребителей определен Российский институт радионавигации и времени .
Приемник ищет свой пик для определения фактического момента приема сигнала - но чем больше пузырь бесформен, тем труднее получить точное считывание, поэтому точность расчетного положения будет меньше. Поэтому приемник может игнорировать все сигналы после первого приема в данный единицу времени, с высокой вероятностью признавая, что он получил прямой сигнал. Почему такие решения только сейчас? Вопреки внешнему виду, речь идет не о прогрессе в области полупроводников, но это также важно. Фактически, только в этом году мы получили достаточное количество из них для применения в таких условиях.
Сетевая радионавигационная спутниковая система (СРНСС) Глонасс
Система Глонасс предназначена для глобальной оперативной навигации приземных подвижных объектов. СРНСС разработана по заказу Министерства Обороны. По своей структуре Глонасс так же, как и GPS, считается системой двойного действия, то есть может использоваться как в военных, так и в гражданских целях.
Раньше все, что им нужно было сделать, это повысить точность измерений для систем, работающих под открытым небом, например, в море или на полях. В дополнение к производителям смартфонов и автомобильной навигации новые чипы, безусловно, будут оценены террористами. Можно только представить себе, как мощное оружие террора будет руководствоваться с точностью до 30 см автономных беспилотных летательных аппаратов, установленных на них взрывчаткой. В некоторых случаях - лучше, чем раствор, спрятанный в фургоне с выдвижной крышей.
Это, вероятно, приведет к распространению решений, аналогичных тем, которые используются сегодня в Москве. Глобальная система позиционирования. 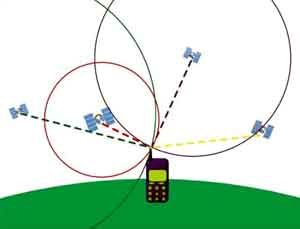

Глобальная система позиционирования «Глобальная система позиционирования» - это космическая спутниковая навигационная система, которая предоставляет информацию о времени и месте, независимо от погоды, в любой точке мира или где есть ненавязчивая область обзора четыре или более спутников. Система предоставляет важные возможности военным, коммерческим и гражданским пользователям по всему миру.
Система в целом включает в себя три функциональные части (в профессиональной литературе эти части называются сегментами) (рис. 1).
Рисунок 1.Сегменты высокоорбитальных навигационных систем Глонасс и GPS
космический сегмент, в который входит орбитальная группировка искусственных спутников Земли (иными словами, навигационных космических аппаратов);
Советский Союз запустил первый искусственный спутник «Спутник» в двух американских физиках Уильяме Гие и Джордже Вейффенбахе из Лаборатории прикладной физики Джона Хопкинса решил контролировать спутниковые радиопередачи. Через несколько часов они поняли, что из-за эффекта Допплера они могут указать место спутника на орбите.
Он использовал созвездие из пяти спутников и мог обеспечивать обновленную позицию примерно один раз в час. Он стал полностью работоспособным в Год получения, зачисляется за его изобретение. Его свободный доступ любого человека в мире признается как право, а не как привилегия. В настоящее время это единственная полностью функциональная система, состоящая из созвездия, содержащего 30 спутников.
сегмент управления, наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
аппаратура пользователей системы.
Из этих трех частей последняя, аппаратура пользователей, самая многочисленная. Система Глонасс является беззапросной, поэтому количество потребителей системы не имеет значения. Помимо основной функции - навигационных определений, - система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удаленных наземных объектах и взаимную геодезическую привязку. Кроме того, с ее помощью можно производить определение ориентации объекта на основе измерений, производимых от четырех приемников сигналов навигационных спутников.
Из-за быстрой эволюции технологий и все более сложных военных стандартов она обходится технически. Новая система будет иметь спутники, способные передавать сигнал в 500 раз более мощный, чем современные спутники, и будут иметь значительные улучшения в военных приложениях.
Индия представляет реальную угрозу и даже рассматривается как дестабилизирующий фактор в превосходстве глобальных систем позиционирования. С бюджетом более 300 миллионов долларов США он нацелен на предоставление услуг позиционирования с общим охватом национальной территории с использованием сети из 7 спутников.
В системе Глонасс в качестве радионавигационной опорной станции используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км (рис. 2). Период обращения спутника вокруг Земли равен, в среднем, 11 часов 45 минут. Время эксплуатации спутника ≈ 5 лет, за это время параметры его орбиты не должны отличаться от номинальных значений больше чем на 5%. Сам спутник представляет собой герметический контейнер диаметром 1,35 м и длиной 7,84 м, внутри которого размещается различного рода аппаратура. Питание всех систем производится от солнечных батарей. Общая масса спутника - 1415 кг. В состав бортовой аппаратуры входят: бортовой навигационный передатчик, хронизатор (часы), бортовой управляющий комплекс, система ориентации и стабилизации и так далее.
Рисунок 2.Космический сегмент систем ГЛОНАСС и GPS
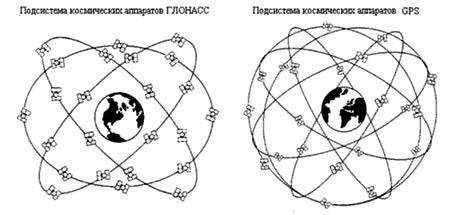
Рисунок 3.Сегмент наземного комплекса управления системы Глонасс
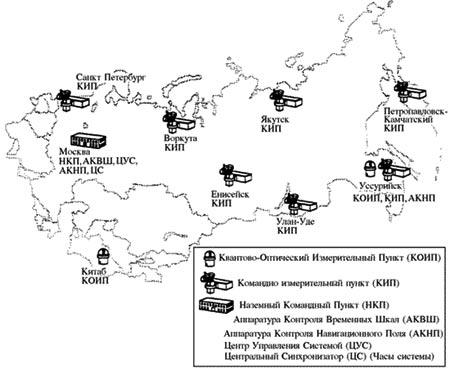
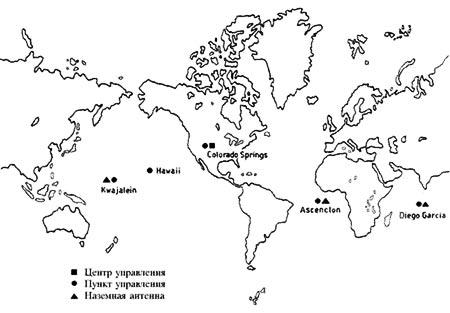
Рисунок 4.Сегмент наземного комплекса управления системы GPS
Сегмент наземного комплекса управления системы ГЛОНАСС выполняет следующие функции:
эфемеридное и частотно-временное обеспечение;
мониторинг радионавигационного поля;
радиотелеметрический мониторинг НКА;
командное и программное радиоуправление НКА.
Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10-13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10-14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3√5 нс.
Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определенный промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости.
Сетевая радионавигационная спутниковая система GPS
Американская система GPS по своим функциональным возможностям аналогична отечественной системе Глонасс. Ее основное назначение - высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства Обороны США и находится под его управлением. Согласно интерфейсному контрольному документу, основными разработчиками системы являются:
по космическому сегменту - Rockwell International Space Division, Martin Marietta Astro Space Division;
по сегменту управления - IBM, Federal System Company;
по сегменту потребителей - Rockwell International, Collins Avio-nics & Communication Division .
Как и система Глонасс, GPS состоит из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Как было сказано выше, орбитальная группировка GPS состоит из 28 навигационных космических аппаратов. Все они находятся на круговых орбитах с периодом обращения вокруг Земли, равным 12 часам. Высота орбиты каждого спутника равна ~ 20000 км. НКА системы GPS проходили ряд усовершенствований, которые сказывались на их характеристиках в целом. В табл. 1 приведены краткие характеристики космических аппаратов, используемых в системе.
Таблица 1.Характеристики космических аппаратов, используемых в системе GPS
|
Масса на орбите |
Мощность энергоисточников, Вт |
Расчетный срок активного существования |
Год запуска первого НКА |
|
Таблица 2.Сравнительные характеристики систем ГЛОНАСС и GPS
|
Показатель | ||
|
Число КА в полной орбитальной группировке | ||
|
Число орбитальных плоскостей | ||
|
Число КА в каждой плоскости | ||
|
Наклонение орбиты | ||
|
Высота орбиты, км | ||
|
Период обращения спутника |
11 ч. 15 мин. 44 с |
11 ч. 58 мин. 00 с |
|
Система координат | ||
|
Масса навигационного КА, кг | ||
|
Мощность солнечных батарей, Вт | ||
|
Срок активного существования, лет | ||
|
Средства вывода КА на орбиту |
"Протон-К/ДМ" | |
|
Число КА, выводимых за один запуск | ||
|
Космодром |
Байконур (Казахстан) |
Мыс Канаверел (Cape Canaveral) |
|
Эталонное время | ||
|
Метод доступа | ||
|
Несущая частота: L1 L2 |
1598,0625≈1604,25 7/9 L1 |
1575,42 60/77 L1 |
|
Поляризация |
Правосторонняя |
Правосторонняя |
|
Тип псевдошумовой последовательности |
m-последовательность |
код Голда |
|
Число элементов кода: C/A P | ||
|
Скорость кодирования, Мбит/с: C/A P | ||
|
Уровень внутрисистемных радиопомех, дБ | ||
|
Структура навигационного сообщения |
||
|
Скорость передачи, бит/с | ||
|
Вид модуляции |
BPSK (Манчестер) | |
|
Длина суперкадра, мин. |
2,5 (5 кадров) |
12,5 (25 кадров) |
|
Длина кадра, с |
30 (15 строк) |
30 (5 строк) |
|
Длина строки, с | ||
При проектировании системы в целом и НКА в частности, большое внимание уделяется вопросам автономного функционирования. Так, космические аппараты первого поколения (Блок-I) обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3√4 дней. В аппаратах Блок-II этот срок был увеличен до 14 дней. В новой модификации НКА Блок-IIR позволяет автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной син-хронизации спутников. Аппараты Блок-IIF предполагается использовать взамен отработавших Блок-IIR.
Структура навигационных радиосигналов системы Глонасс
В системе Глонасс используется частотное разделение сигналов (FDMA), излучаемых каждым спутником - двух фазоманипулированных сигналов. Частота первого сигнала лежит в диапазоне L1 ~ 1600 МГц, а частота второго - в диапазоне L2 ~ 1250 МГц. Номинальные значения рабочих частот радиосигналов, передаваемых в диапазонах L1 и L2, определяются выражением:
f k1 = f 1 + kf 1 f k2 = f 2 + kf 2 k = 0,1,...,24, (1)
где k = 0,1,...,24 - номера литеров (каналов) рабочих частот спутников;
f 1 = 1602 МГц;f 1 = 9/16 = 0,5625 МГц; f 2 = 1246 МГц;f 2 = 7/16 = 0,4375 МГц.
Для каждого спутника рабочие частоты сигналов в диапазоне L1 и L2 когерентны и формируются от одного эталона частоты. Отношение рабочих частот несущей каждого спутника:
f k1 /f k2 = 7/9.
Номинальное значение частоты бортового генератора, с точки зрения наблюдателя, находящегося на поверхности Земли, равно 5,0 MГц.
В диапазоне L1 каждый спутник системы Глонасс излучает 2 несущие на одной и той же частоте, сдвинутые друг относительно друга по фазе на 90º (рис. 5).
Рисунок 5.Векторная диаграмма несущих сигналов систем ГЛОНАСС и GPS
Одна из несущих подвергается фазовой манипуляции на 180º. Модулирующий сигнал получают сложением по модулю 2 трех двоичных сигналов (рис. 6):
грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с (рис. 6в);
последовательности навигационных данных, передаваемых со скоростью 50 бит/с (рис. 6а);
меандрового колебания, передаваемого со скоростью 100 бит/с (рис. 6б).
Рисунок 6.Структура сигнала ГЛОНАСС
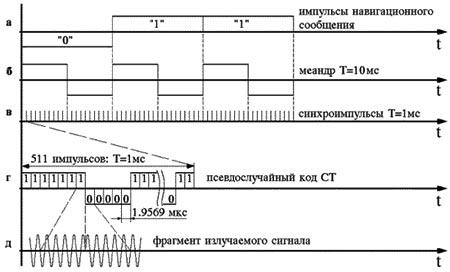
Сигнал в диапазоне L1 (аналогичен C/A-коду в GPS) доступен для всех потребителей в зоне видимости КА. Сигнал в диапазоне L2 предназначен для военных нужд, и его структура не раскрывается.
Состав и структура навигационных сообщений спутников системы Глонасс
Навигационное сообщение формируется в виде непрерывно следующих строк, каждая длительностью 2 с. В первой части строки (интервал 1,7 с) передаются навигационные данные, а во второй (0,3 с) - Метка Времени. Она представляет собой укороченную псевдослучайную последовательность, состоящую из 30 символов с тактовой частотой 100 бит/с.
Навигационные сообщения спутников системы Глонасс необходимы потребителям для навигационных определений и планирования сеансов связи со спутниками. По своему содержанию навигационные сообщения делятся на оперативную и неоперативную информацию.
Оперативная информация относится к спутнику, из сигнала которого она была получена. К оперативной информации относят:
оцифровку меток времени;
относительное отличие несущей частоты спутника от номинального значения;
эфемеридная информация.
Время привязки эфемеридной информации и частотно-временные поправки, имеющие получасовую кратность от начала суток, позволяют точно определять географические координаты и скорость движения спутника.
Неоперативная информация содержит альманах, включающий:
данные о состоянии всех спутников системы;
сдвиг шкалы времени спутника относительно шкалы системы;
параметры орбит всех спутников системы;
поправку к шкале времени системы Глонасс.
Выбор оптимального "созвездия" КА и прогноза доплеровского сдвига несущей частоты обеспечивается за счет анализа альманаха системы.
Навигационные сообщения спутников системы Глонасс структурированы в виде суперкадров длительностью 2,5 мин. Суперкадр состоит из пяти кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с. Из 2 с длительности строки последние 0,3 с занимает метка времени. Остальная часть строки содержит 85 символов цифровой информации, передаваемых с частотой 50 Гц.
В составе каждого кадра передается полный объем оперативной информации и часть альманаха системы. Полный альманах содержится во всем суперкадре. При этом информация суперкадра, содержащаяся в строках 1√4, относится к тому спутнику, с которого она поступает (оперативная часть), и не меняется в пределах суперкадра.
Структура навигационных радиосигналов системы GPS
В системе GPS используется кодовое разделение сигналов (СDMA), поэтому все спутники излучают сигналы с одинаковой частотой. Каждый спутник системы GPS излучает два фазоманипулированных сигнала. Частота первого сигнала составляет L1 = 1575,42 МГц, а второго - L2 = 1227,6 МГц. Сигнал несущей частоты L1 модулируется двумя двоичными последовательностями, каждая из которых образована путем суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных, формируемых со скоростью 50 бит/с. На частоте L1 передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р или засекреченного кода Y и навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/A (открытого) кода и той же последовательности навигационных данных.
Радиосигнал на частоте L2 бифазно манипулирован только одной из двух ранее рассмотренных последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли.
Каждый спутник использует свойственные только ему дальномерные коды С/A и Р(Y), что и позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
Состав и структура навигационных сообщений спутников системы GPS
Структурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12,5 мин). Один кадр передается в течение 30 с и имеет размер 1500 бит. Кадр разделен на 5 подкадров по 300 бит и передается в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6-с интервала системного времени GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов являются проверочными битами.
В 1-, 2- и 3-м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид КА, с которым установлена связь. Содержание и структура этих подкадров остаются неизменными на всех страницах суперкадра. В 4- и 5-м подкадрах содержится информация о конфигурации и состоянии всех КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее.
Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов
К сегменту потребителей систем GPS и ГЛОНАСС относятся приемники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приемник можно разделить на три функциональные части:
радиочастотную часть;
цифровой~коррелятор;
процессор.
С выхода антенно-фидерного устройства (антенны) сигнал поступает на радиочастотную часть (рис. 7). Основная задача этой части заключается в усилении входного сигнала, фильтрации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приемника поступает тактовая частота для цифровой части приемника. С выхода радиочастотной части цифровые отсчеты входного сигнала поступают на вход цифрового коррелятора.
Рисунок 7.Обобщенная структура приемника
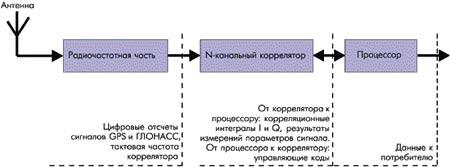
В корреляторе спектр сигнала переносится на "нулевую" частоту. Это производится путем перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляционную обработку путем перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчеты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой). Измерения параметров сигнала в приемнике производятся не непосредственно по входному сигналу, а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I и Q позволяют оценить степень "похожести" (коррелированности) опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, - формировать опорный сигнал, согласно с управляющими воздействиями (кодами управления), поступающими с процессора. Кроме того, в некоторых приемниках коррелятор формирует необходимые измерения опорных сигналов и передает их в процессор для дальнейшей обработки. В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре, обрабатывая соответствующим образом управляющие коды, что и делается во многих современных приемниках.
Какие параметры сигнала измеряет коррелятор (процессор)?
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приема этого фрагмента определяется по шкале времени приемника. Шкала времени приемника (потребителя) формируется с помощью кварцевых стандартов частоты, поэтому наблюдается постоянный "уход" шкалы времени приемника относительно шкалы времени системы. Разность между моментом приема фрагмента сигнала, отсчитанным по шкале времени приемника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью . Почему псевдодальностью? Потому что она отличается от истинной дальности на величину, равную произведению скорости света на "уход" шкалы времени приемника относительно шкалы времени системы. При решении навигационной задачи этот параметр определяется наравне с координатами потребителя (приемника).
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС и образуют своеобразную 6(2)-секундную шкалу. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS - 1023, для ГЛОНАСС - 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью ~ 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0,01 периода, что составляет точность определения псевдодальности 3 м.
На основании измерений параметров опорного гармонического колебания, формируемого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
Определение координат потребителя
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей мо-дели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полета КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задается узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации.
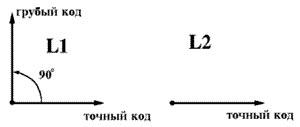
Как было сказано выше, для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приемнике с точностью около 1 м. Для удобства рассмотрим простейший "плоский" случай, представленный на рис. 8.
Рисунок 8.Определение координат потребителя
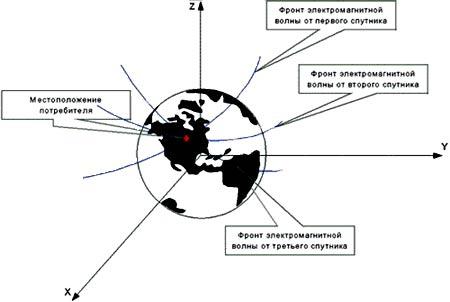
Каждый спутник (рис. 8) можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе.
Дифференциальный режим
Спутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10√15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приемника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приемник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съемки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приемнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта.
В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.
В качестве широкозонных стоит отметить такие системы, как американская WAAS, европейская EGNOS и японская MSAS. Эти системы используют геостационарные спутники для передачи поправок всем потребителям, находящимся в зоне их покрытия.
Региональные системы предназначены для навигационного обеспечения отдельных участков земной поверхности. Обычно региональные системы используют в крупных городах, на транспортных магистралях и судоходных реках, в портах и по берегу морей и океанов. Диаметр рабочей зоны региональной системы обычно составляет от 500 до 2000 км. Она может иметь в своем составе одну или несколько опорных станций.
Локальные системы имеют максимальный радиус действия от 50 до 220 км. Они включают обычно одну базовую станцию. Локальные системы обычно разделяют по способу их применения: морские, авиационные и геодезические локальные дифференциальные станции.
Развитие спутниковой навигации
Общее направление модернизации обоих спутниковых систем GPS и Глонасс связано с повышением точности навигационных определений, улучшением сервиса, предоставляемого пользователям, повышением срока службы и надежностью бортовой аппаратуры спутников, улучшением совместимости с другими радиотехническими системами и развитием дифференциальных подсистем. Общее направление развития систем GPS и Глонасс совпадает, но динамика и достигнутые результаты сильно отличаются.
Совершенствование системы ГЛОНАСС планируется осуществлять на базе спутников нового поколения "ГЛОНАСС-М". Этот спутник будет обладать увеличенным ресурсом службы и станет излучать навигационный сигнал в диапазоне L2 для гражданских применений.
Аналогичное решение было принято в США, где 5 января 1999 года объявлено о выделении 400 млн. долл. на модернизацию системы GPS, связанную с передачей C/A-кода на частоте L2 (1222,7 МГц) и введением третьей несущей L3 (1176,45 МГц) на КА, которые будут запускаться с 2005 года. Сигнал на частоте L2 намечено использовать для гражданских нужд, не связанных непосредственно с опасностью для жизни людей. Предлагается начать реализацию этого решения с 2003 года. Третий гражданский сигнал на частоте L3 решено использовать для нужд гражданской авиации.
Литература
Радиотехнические системы. Под ред. Казаринова Ю.М. М.: Высшая школа, 1990.
Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000.
Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. М.: ИПРЖР, 1998.
Липкин И.А. Спутниковые навигационные системы. М.: Вузовская книга, 2001.
Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. М.: КНИЦ ВКС, 1995.
Interface Control Document: NAVSTAR GPS Space Segment / Navigation User Interfaces (ICD-GPS-200). Rockwell Int. Corp. 1987.
Ростовский Государственный Строительный Университет
Кафедра Прикладной Геодезии
Спутниковые системы навигации GPS и Глонасс
Выполнил: студ гр. ПГ-579 Веремчук Р. В
Проверил: Яковлев В. А
Ростов-на-Дону
Введение
В декабре 1976 г. было принято Постановление ЦК КПСС и Совета Министров СССР "О развертывании Единой космической навигационной системы ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система)". Это постановление по сути лишь узаконило уже начавшиеся работы по созданию новой системы и определило порядок ее разработки и испытаний. Технические предложения по системе ГЛОНАСС в составе КА 11Ф654 "Ураган" были разработаны в красноярском НПО прикладной механики (НПО ПМ) в начале 1976 г. и рассмотрены межведомственной комиссией в августе того же года. Система ГЛОНАСС представляет второе поколение отечественных спутниковых навигационных систем. Создание этой навигационной системы было предопределено потребностями новых потенциальных потребителей, нуждавшихся в высокоточной привязке своего положения во времени и пространстве. В качестве таких потребителей выступали авиация, морской флот, наземные транспортные средства, космические аппараты, а также специальные боевые комплексы (в частности, мобильные МБР средней и большой дальности). Широкое внимание к спутниковой навигации привлекла успешная эксплуатация низкоорбитальных навигационных спутниковых систем морскими потребителями. В 1976 г. на вооружение Советской Армии была принята навигационно-связная система "Циклон-Б" в составе шести космических аппаратов "Парус", обращающихся на околополярных орбитах высотой 1000 км. Через три года была сдана в эксплуатацию спутниковая радионавигационная система (СРНС) "Цикада" в составе четырех КА на орбитах того же класса, что и у КА "Парус". И если первая система использовалась исключительно в интересах МО СССР, то вторая предназначалась, главным образом, для навигации гражданских морских судов. Оснащение спутниковой навигационной аппаратурой судов торгового флота оказалось очень выгодным, поскольку благодаря повышению точности судовождения удавалось настолько сэкономить время плавания и топливо, что бортовая аппаратура потребителя окупала себя после первого же года эксплуатации. В ходе испытаний этих и предшествовавшей им системы "Циклон" было установлено, что погрешность местоопределения движущегося судна по навигационным сигналам этих спутников составляет 250... 300 м. Выяснилось также, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ). С целью повышения точности определения и прогнозирования параметров орбит навигационных спутников была отработана специальная схема проведения измерений параметров орбит средствами НКУ, разработаны более точные методики прогнозирования. Для выявления локальных особенностей гравитационного поля Земли, оказывающих воздействие на выбранные орбиты навигационных КА (НКА), на такие же орбиты были запущены специальные геодезические спутники "Космос-842" и "Космос-911". Комплекс принятых мер позволил уточнить координаты измерительных средств и вычислить параметры согласующей модели гравитационного поля, предназначенной специально для определения и прогнозирования параметров движения НКА. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок, так что их погрешность на интервале суточного прогноза не превышала 70...80 м. Как следствие, погрешность определения морскими судами своего местоположения уменьшилась до 80...100 м.
Однако выполнить требования всех потенциальных классов новых потребителей низкоорбитальные системы не могли в силу принципов, заложенных в основу их построения. Так, если для неподвижных потребителей, имеющих двухканальную приемную аппаратуру, погрешность определения местоположения удалось снизить до 32 м (данные для американской СРНС "Транзит"), то при движении погрешности сразу же начинают возрастать из-за неточности счисления пути - низкоорбитальные СРНС не позволяли определять скорость движения. Более того, по получаемым измерениям можно определить только две пространственные координаты. Вторым недостатком низкоорбитальных систем было отсутствие глобальности покрытия, поскольку, например, на экваторе спутники проходили через зону видимости потребителя в среднем через 1.5 часа, что допускает проведение только дискретных навигационных сеансов. Наконец, ввиду использования в сеансе лишь одного НКА продолжительность измерений может доходить до 10...16 мин. Большая длительность сеансов и значительные интервалы между ними делают неизбежным применение специальных мероприятий для счисления пути. При этом ошибки счисления и ограничивают точность местоопределения. Тем не менее была испытана самолетная аппаратура применительно к сигналам как системы "Транзит", так и "Цикада". При этом подтвердилось, что погрешность определения местоположения слабо зависит от маневров самолета и действительно определяется преимущественно погрешностями знания путевой скорости, не выходя за пределы 1.8 км.
СРНС второго поколения изначально проектировались как системы, которым все перечисленные недостатки не свойственны. Главным требованием при проектировании было обеспечение потребителю в любой момент времени возможности определения трех пространственных координат, вектора скорости и точного времени, что достигается путем одновременного приема сигналов от как минимум четырех НКА. В конечном итоге, это привело к реализации важной технической идеи - координации пространственного положения НКА на орбитах и координации по времени излучаемых спутниками сигналов. Координация движения всех НКА придает системе сетевые свойства, которых она лишается при отсутствии коррекции положения НКА.
В качестве орбит для новой системы первоначально были выбраны средневысокие (20000 км) полусуточные орбиты, которые обеспечивали оптимальное соотношение между количеством КА в системе и величиной зоны радиообзора. Однако впоследствии высота рабочей орбиты была уменьшена до 19100 км. Это было сделано исходя из того, что для КА, имеющих период обращения, равный половине суток, проявляется резонансный эффект влияния определенных гармоник геопотенциала, приводящий к достаточно быстрому "разрушению" заданного относительного положения НКА и конфигурации системы в целом. Очевидно, что в этом случае для поддержания системы пришлось бы чаще проводить коррекции орбиты каждого КА. При выбранной высоте орбиты для гарантированной видимости потребителем не менее четырех спутников их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность. Следует отметить, что в настоящее время это требование потеряло актуальность, поскольку современная стандартная навигационная аппаратура потребителя (НАП) имеет возможность принимать сигналы от 8 до 12 НКА в зоне радиовидимости одновременно, что позволяет не заботиться о выборе оптимальной четверки, а просто обрабатывать все принимаемые измерения.
Одной из главных проблем создания СРНС, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд, нс), поскольку рассинхронизация излучаемых спутниками навигационных сигналов всего в 10 нс вызывает дополнительную погрешность в определении местоположения потребителя до 10...15 м. Для решения задачи высокоточной синхронизации бортовых шкал времени потребовалась установка на спутниках высокостабильных цезиевых стандартов частоты и наземного водородного стандарта (на порядок более стабильного), а также создания наземных средств сличения шкал с погрешностью 3...5 нс.
В 1977-78 гг. в НПО ПМ проводилось эскизное проектирование системы, материалы которого были одобрены в сентябре 1978 г. межведомственной комиссией под председательством генерал-майора И. В. Мещерякова. Тактико-техническое задание (ТТЗ) на систему ГЛОНАСС было согласовано с главнокомандующими всех видов Вооруженых Сил и министерствами: Минобщемашем, Минрадиопромом, Минавиапромом, Миноборонпромом, Минморфлотом, Минрыбхозом, Минсудпромом и Министерством гражданской авиации. В ноябре 1978 г. ТТЗ было утверждено Министром обороны СССР.
Однако к тому времени из-за слишком долгого периода согласования задания были сорваны первоначальные сроки по развертыванию системы. Поэтому 29 августа 1979 г. по ГЛОНАСС вышло новое Постановление ЦК и СМ. В нем были установлены следующие сроки выполнения работ по системе:
Начало летных испытаний и создание системы из 4-6 КА "Ураган" для проверки основных принципов и технических характеристик -1981 год;
Создание системы из 10-12 КА "Ураган" (в двух орбитальных рабочих плоскостях) и сдача ее на вооружение в составе и с тактико-техническими характеристиками по согласованию между Минобороны, Минобщемашем и Минрадиопромом - 1984 год;
Дооснащение системы до 24 КА - 1987 год.
Основными разработчиками системы в Постановлении были определены:
НПО ПМ Минобщемаша - по системе в целом;
ПО "Радиоприбор" (ныне РНИИ КП) Минобщемаша - по наземному комплексу управления, бортовому радиотехническому комплексу, аппаратуре потребителей;
ЛНРТИ (ныне РИРВ) Минрадиопрома - по навигационно-временному комплексу.
Однако и эти порядок и сроки пришлось еще раз уточнить в июле 1981 г. В новом Постановлении ЦК и СМ сроком начала развертывания системы был назван 1982 г.
Летные испытания системы ГЛОНАСС были начаты 12 октября 1982 г. запуском первого КА 11Ф654 "Ураган" N11л и двух габаритно-весовых макетов 11Ф654ГВМ. Затем в последующих шести запусках на орбиту выводились по два штатных КА и одному ГВМ. Это было связано с неготовностью электронной аппаратуры спутников. Лишь с восьмого запуска в рамках развертывания системы ГЛОНАСС (16 сентября 1986 г.) на орбиту были выведены сразу три штатных КА. Дважды (10 января и 31 мая 1989 г.) вместе с двумя КА "Ураган" на орбиту выводились пассивные геодезические КА ПКА "Эталон", используемые для уточнения параметров гравитационного поля и его влияния на орбиты КА "Ураган".
Для отработки навигационной аппаратуры были изготовлены базовые комплекты по шесть штук каждого наименования для ВВС, ВМФ, СВ, МГА, ММФ и РВСН. Всего для летных испытаний было выделено 22 космических аппарата (9-10 запусков). Это число КА было израсходовано к 16 сентября 1987 г. Однако к этому моменту система не была развернута даже для ограниченного использования (12 КА в двух плоскостях). Лишь после запуска 4 апреля 1991 г. в составе ГЛОНАСС оказалось одновременно 12 работоспособных КА.
24 сентября 1993 г. первая очередь системы ГЛОНАСС была принята на вооружение. С этого момента стали проводиться запуски КА в третью орбитальную плоскость. 14 декабря 1995 г. после 27-го запуска "Протона-К" с "Ураганами" развертывание штатной конфигурации системы ГЛОНАСС было завершено. Всего с октября 1982 г. по декабрь 1998 г. на орбиту были выведены 74 КА "Ураган" и восемь его габаритно-весовых макетов (ГВМ). За время развертывания системы шесть "Ураганов" оказались на нерасчетных орбитах из-за отказов разгонного блока 11С861. По оценкам, проведенным в 1997 г., на развертывание системы было потрачено почти 2.5 млрд $.
Основные принципы работы системы ГЛОНАСС
Спутники системы ГЛОНАСС непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) в диапазоне L1 (1,6 ГГц) и навигационный сигнал высокой точности (ВТ) в диапазонах L1 и L2 (1,2 ГГц). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям на постоянной и глобальной основе и обеспечивает, при использовании приемников ГЛОНАСС возможность определения:
· горизонтальных координат с точностью 50-70 м (вероятность 99,7%);
· вертикальных координат с точностью 70 м (вероятность 99,7%);
· составляющих вектора скорости с точностью 15 см/с (вероятность 99,7%)
· точного времени с точностью 0,7 мкс (вероятность 99,7 %).
Эти точности можно значительно улучшить, если использовать дифференциальный метод навигации и/или дополнительные специальные методы измерений.
Сигнал ВТ предназначен, в основном, для потребителей МО РФ, и его несанкционированное использование не рекомендуется. Вопрос о предоставлении сигнала ВТ гражданским потребителям находится в стадии рассмотрения.
Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. При приеме навигационных радиосигналов ГЛОНАСС приемник, используя известные радиотехнические методы, измеряет дальности до видимых спутников и измеряет скорости их движения.
Одновременно с проведением измерений в приемнике выполняется автоматическая обработка содержащихся в каждом навигационном радиосигнале меток времени и цифровой информации. Цифровая информация описывает положение данного спутника в пространстве и времени (эфемериды) относительно единой для системы шкалы времени и в геоцентрической связанной декартовой системе координат. Кроме того, цифровая информация описывает положение других спутников системы (альманах) в виде кеплеровских элементов их орбит и содержит некоторые другие параметры. Результаты измерений и принятая цифровая информация являются исходными данными для решения навигационной задачи по определению координат и параметров движения. Навигационная задача решается автоматически в вычислительном устройстве приемника, при этом используется известный метод наименьших квадратов. В результате решения определяются три координаты местоположения потребителя, скорость его движения и осуществляется привязка шкалы времени потребителя к высокоточной шкале Координированного всемирного времени (UTC).
Радионавигационное поле
Навигационные радиосигналы, излучаемые штатными НКА, образуют радионавигационное поле в околоземном пространстве.
В СРНС ГЛОНАСС каждый штатный НКА излучает навигационные радиосигналы 1600 МГц и 1250 МГц в сторону Земли с помощью передающих антенн, рабочая часть диаграммы направленности (ДН) которых имеет ширину 2 =38 и “освещает” диск Земли с избытком до высоты h 0 над поверхностью.
Рабочую часть ДН можно представить в виде конусного радиолуча с углом 2 0 при вершине. Очевидно, что
sin 0 =(h 0 +r)/(H+r),
где r = 6400 км радиус Земли; H = 19100 км высота орбиты НКА.
Подставив 0 =19 , получим h 0 = 2000 км.
При полной ОГ (24 штатных НКА) радионавигационное поле на высотах h h 0 = 2000 км непрерывно в пространстве, т.е. потребитель в любой точке этого пространства “освещается” радиолучами не менее чем от четырех НКА, образующих по отношению к нему удовлетворительное по геометрическому фактору созвездие для оперативного автономного определения координат и вектора скорости.
На высотах h h 0 радионавигационное поле становится дискретным в пространстве. Космические объекты на высотах h 0 h H “освещены” радиолучами от необходимого для оперативной навигации созвездия (не менее четырех НКА, включая НКА ниже местного горизонта) не везде, а только при нахождении в определенных областях пространства.
Космические объекты на высотах h H (например, на геостационарной орбите) будут “освещены” на некоторых участках своей орбиты радиолучом от одного или двух НКА (при полной ОГ), и НАП может не оперативно определить орбиту космического объекта на основе обработки результатов приема навигационных радиосигналов на “освещенных” участках орбиты.
Ограничимся рассмотрением непрерывного радионавигационного поля (h h 0). Основной характеристикой радионавигационного поля для наземного потребителя являются мощности навигационного радиосигнала от околозенитного и пригоризонтного НКА на выходе “стандартной” приемной антенны (без учета отражений от поверхности Земли):
P 0 = P п G() G 0 () 2 /(4 R) 2 ,
где P п мощность излучения передатчика; G() коэффициент направленности передающей антенны (с учетом потерь в АФУ) в направлении на приемную антенну; G 0 () коэффициент направленности “стандартной” приемной антенны в направлении на передающую антенну; длина волны несущего колебания радиосигнала; R дальность от приемной антенны до передающей антенны.
В системе ГЛОНАСС передающие антенны для навигационных радиосигналов на НКА имеют круговую правую поляризацию излучения.
Коэффициент направленности G() передающих антенн в рабочем секторе направлений 19 относительно оси антенны составляет
В качестве “стандартной” приемной антенны удобно рассматривать изотропную приемную антенну с круговой поляризацией, G 0 () = 1.
Дальность R от приемной антенны, размещенной на поверхности Земли, до околозенитного ( = 90) НКА составит R = H = 19100 км, до пригоризонтного ( =5) НКА составит R = 24000 км.
Бюджет мощности P 0 узкополосных навигационных радиосигналов на выходе “стандартной” приемной антенны:
| 1600 МГц | 1250 МГц | |||
| , угл. град. | 90 | 5 | 90 | 5 |
| P п, дБ Вт | | | ||
| G(), дБ | +10 | +12 | +9 | +11 |
| ( R) 2 , дБ | 182 | 184 | 180 | 182 |
| G 0 (), дБ | 0 | 0 | ||
| P 0 , дБ | 157 1 | 157 1 | 162 1 | 162 1 |
Отметим, что мощность навигационного радиосигнала, принимаемого наземным потребителем с помощью изотропной антенны, одинакова для околозенитного и пригоризонтного НКА.
Структура сигнала ГЛОНАСС
грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с (рис. 6в);
последовательности навигационных данных, передаваемых со скоростью 50 бит/с (рис. 6а);
меандрового колебания, передаваемого со скоростью 100 бит/с (рис. 6б).
Сигнал в диапазоне L1 (аналогичен C/A-коду в GPS) доступен для всех потребителей в зоне видимости КА. Сигнал в диапазоне L2 предназначен для военных нужд, и его структура не раскрывается.
Для навигационных радиосигналов ЦИ формируется на борту НКА на основе данных, передаваемых от НКУ системы на борт НКА с помощью радиотехнических средств. Передаваемая в навигационных радиосигналах ЦИ структурирована в виде строк, кадров и суперкадров.
В узкополосном навигационном радиосигнале 1600 МГц строка ЦИ имеет длительность 2 с (вместе с МВ) и содержит 85 двоичных символов длительностью по 20 мс, передаваемых в относительном коде. Первый символ каждой строки является начальным (“холостым”) для относительного кода. Последние восемь символов в каждой строке являются проверочными символами кода Хемминга, позволяющие исправлять одиночный ошибочный символ и обнаруживать два ошибочных символа в строке. Кадр содержит 15 строк (30 с), суперкадр 5 кадров (2,5 мин).
В составе каждого кадра передается полный объем оперативной ЦИ и часть альманаха системы. Полный альманах передается в пределах суперкадра.
Оперативная ЦИ в кадре относится к НКА, излучающему навигационный радиосигнал, и содержит:
· признаки достоверности ЦИ в кадре;
· время начала кадра t k ;
· эфемеридную информацию координаты и производные координат НКА в прямоугольной геоцентрической системе координат на момент времени t 0 ;
· частотно-временные поправки (ЧВП) на момент времени t 0 в виде относительной поправки к несущей частоте навигационного радиосигнала и поправки к БШВ НКА;
· время t 0 .
Время t 0 , к которому “привязаны” ЭИ и ЧВП, кратны 30 мин от начала суток.
Альманах системы содержит:
· время, к которому относится альманах;
· параметры орбиты, номер пары несущих частот и поправку к БШВ для каждого штатного НКА в ОГ (24 НКА);
· поправку к ШВ системы относительно ШВ страны, погрешность поправки не более 1 мкс.
Альманах системы необходим в НАП для планирования сеанса навигации (выбор оптимального созвездия НКА) и для приема навигационных радиосигналов в системе (прогноз доплеровского сдвига несущей частоты). Оперативная ЦИ необходима в НАП в сеансе навигации, так как ЧВП вносятся в результаты измерений, а ЭИ используется при определении координат и вектора скорости потребителя.
В системе НАВСТАР ЦИ в узкополосных навигационных радиосигналах структурирована следующим образом: строка имеет длительность 6 c, кадр содержит 5 строк (30 с), суперкадр 25 кадров (12,5 мин).
Узкополосные навигационные радиосигналы в системе ГЛОНАСС обеспечивают более оперативный прием (обновление) альманаха за счет более короткой длительности суперкадров (2,5 мин) по сравнению с системой НАВСТАР (12,5 мин)
Навигационные измерения в многоканальной НАП
Рассмотрим многоканальную НАП, использующую узкополосные радиосигналы и предназначенную для глобальной навигации наземных подвижных объектов (сухопутных, морских, воздушных). Будем считать, что в НАП применяется широконаправленная приемная антенна.
В каждом канале НАП в режиме слежения за узкополосным навигационным радиосигналом принимается ЦИ и ежесекундно измеряются два навигационных параметра псевдодальность и радиальная псевдоскорость.
Псевдодальность от объекта до НКА измеряется в НАП посредством измерения сдвига принимаемой ПСП1 относительно опорного сигнала в НАП. Радиальная псевдоскорость объекта относительно НКА измеряется посредством измерения сдвига несущей частоты принимаемого навигационного радиосигнала относительно частоты опорного сигнала в НАП. Опорный сигнал в НАП формируется с использованием кварцевого генератора.
Результаты измерений псевдодальностей S k (t) не менее, чем для четырех выбранных НКА (k = 1,2,3,4) с учетом введения ЧВП, содержащихся в кадре ЦИ, можно выразить следующим образом:
S k (t)=R k (t)+c (t)+c k (t)+ S k (t),
где R k (t) дальность от объекта до НКА; с скорость света; (t) сдвиг ШВ НАП (опорного сигнала) относительно ШВ системы; k (t) погрешность ЧВП; S k (t) погрешность измерений в НАП.
В двухдиапазонной НАП навигационные измерения псевдодальностей на двух несущих частотах в 1600 МГц и н 1250 МГц позволяют исключить ионосферные погрешности измерений следующим образом. Обозначим S 0 (t) измеренная псевдодальность без ионосферных погрешностей. Поскольку для верхнего и нижнего диапазонов
S в (t)=S 0 (t)+А/; S н (t)= S 0 (t)+А/,
где А/ 2 ионосферная погрешность измерения псевдодальности, то алгоритм получения объединенного результата S 0 (t), в котором исключены ионосферные погрешности будет следующим:
S 0 (t)= S в (t)-S н (t); m= н / в =7/9.
Погрешность двухдиапазонного измерения псевдодальности можно оценить следующим образом:
S 0 = S в - S н = 2,53 S в - 1,53 S н.
В сеансе навигации результаты измерений в НАП псевдодальностей относительно не менее четырех НКА, выбранных для сеанса, и принятая ЭИ от выбранных НКА позволяют определить три координаты объекта и сдвиг местной ШВ объекта (опорного сигнала) относительно ШВ системы.
Задача настоящего раздела оценить погрешность измерения псевдодальностей в многоканальной НАП при использовании узкополосных навигационных радиосигналов. Основными источниками погрешностей измерения псевдодальности в многоканальной НАП являются: шумы и многолучевость на входе приемника, тропосфера, ионосфера (в однодиапазонной НАП).
При оценке погрешностей псевдодальности, обусловленных шумами и многолучевости на входе приемника, будем полагать, что в каналах НАП в цепях слежения за ПСП1 применяются дискриминаторы задержки, у которых ширина центрального линейного участка дискриминационной характеристики равна длительности символа ПСП1.
Шумовую погрешность (S) однодиапазонных измерений псевдодальности можно оценить следующим образом:
где c скорость света; F 1 тактовая частота ПСП1; P c /g ш энергетический потенциал узкополосного навигационного радиосигнала на входе приемника; k ухудшение энергетического потенциала в приемнике (k 1,5); T 0 интервал осреднения (накопления) измерений.
Энергетические потенциалы узкополосных навигационных радиосигналов на входе приемника в НАП с широконаправленной приемной антенной (см. выше) составляют [дБ Гц]:
| =90 | =5 | |
| 1600 МГц | +47...49 | +39...44 |
| 1250 МГц | +43...45 | +34...39 |
и соответственно шумовые погрешности однодиапазонных измерений при осреднении T 0 = 1с составят [м]:
| | | |
| (S в) 1600 МГц | 1,7...2,1 | 3,3...6,0 |
| (S н) 1250 МГц | 3,0...4,0 | 5,9...10,5 |
Шумовую погрешность двухдиапазонного измерения псевдодальности найдем следующим образом:
(S 0)={ 2 + 2 } 1/2 ;
и соответственно получим при T 0 =1c
(S 0)= 
Навигационный радиосигнал от пригоризонтного НКА может приходить к наземному подвижному объекту не только прямым путем но и за счет зеркального отражения от земной поверхности (многолучевость). Отраженный радиосигнал приходит к объекту с направления ниже местного горизонта, и при зеркальном отражении изменяется на противоположное направление круговой поляризации радиосигнала. С учетом данного обстоятельства и за счет пространственной избирательности приемной антенны мощность отраженного радиосигнала P c2 будет много меньше мощности прямого радиосигнала P c1 на входе приемника.
Погрешность измерения псевдодальности до пригоризонтного НКА, обусловленная многолучевостью при использовании узкополосного навигационного радиосигнала, будет максимальна в худшей ситуации, когда задержка t отраженного радиосигнала относительно прямого радиосигнала на входе приемника будет равна t=1/2F 1 , где F 1 тактовая частота ПСП1. При t 1/2F 1 , и при t 3/2F 1 погрешность будет много меньше, чем в худшей ситуации. При T 0 =1 c погрешность псевдодальности до пригоризонтного НКА из-за многолучевости в худшей ситуации для узкополосных навигационных радиосигналов будет равна
Подставляя P c2 /P c1 = - (30...32) дБ, получим (S)= 3,0 м, которое хорошо согласуется с экспериментальными данными. Следовательно, при двухдиапазонных измерениях (1600 МГц, 1250 МГц) и T 0 =1 c получим:
(S 0)=![]() (S)=9,0м.
(S)=9,0м.
В тропосфере скорость распространения радиоволны равна c=c 0 /n(h), где с 0 скорость распространения света в вакууме; n(h) коэффициент преломления тропосферы на высоте h над поверхностью Земли, n(h) .
Тропосферную погрешность беззапросного измерения дальности (псевдодальности) для НКА при углах возвышения НКА можно найти следующим образом:
R()=
В НАП тропосферные погрешности компенсируются расчетными поправками. Если рассчитывать тропосферные поправки для средних параметров тропосферы (глобально), то их погрешность ( R) составит 10% от величины поправки R().
Для оценки погрешностей можно воспользоваться простой экспоненциальной моделью тропосферы:
n(h) = n(0) e -h/а;
и, подставив средние значения n(0)=3 10 -4 , a=8 км, получим:
Проведем оценку ионосферных погрешностей измерения псевдодальности в однодиапазонной НАП (1600 МГц). Ионосфера Земли начинается с высоты 100 км, на высотах от 300 до 400 электронная концентрация в ионосфере максимальна и выше с увеличением высоты уменьшается приблизительно экспоненциально и на высоте 900 км электронная концентрация в ионосфере составляет приблизительно 10% от максимальной.
Групповая скорость радиосигнала в ионосфере равна с = с 0 n(h), где с 0 скорость света в вакууме, n(h) коэффициент преломления ионосферы на высоте h над поверхностью Земли, n(h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 МГц можно воспользоваться равенством:
n(h) = 1-n(h) = 40,3 N(h) / f 2 ,
где N(h) электронная концентрация ионосферы на высоте h [эл/см 3 ]; f-несущая частота радиосигнала [кГц].
Проведем оценку ионосферных погрешностей беззапросного измерения дальности (псевдодальности) до околозенитного и пригоризонтного НКА.
Ионосферную погрешность при вертикальном прохождении радиолуча к наземному объекту от зенитного НКА можно оценить следующим образом:
R 1
= 
Вертикальный профиль величины n(h) в зависимости от высоты можно представить в виде:
1. при h h 1 =100 км n(h) = 0 ;
2. при h 1 h h 2 = 300 км n(h) линейно возрастает до n m , где n m максимальное значение n(h) ;
3. при h 2 h h 3 = 400 км n(h) = n m ;
4. при h h 3 = 400 км n(h) = n m e
Используя данную аппроксимацию для n(h) , получим формулу для оценки ионосферной погрешности беззапросных измерений дальности (псевдодальности) до зенитного НКА
R 1 = b э n m ;
b э = 0,5 (h 2 -h 1)+(h 3 -h 2)+a=400 км.
Параметр b э можно назвать толщиной эквивалентной ионосферы, у которой n(h) = n m на высотах h = 200...600 км и вне этих высот n(h) = 0.
Ионосферную погрешность R 2 псевдодальности горизонтного НКА ( ) можно приблизительно оценить следующим образом:
R 2 = R 1 / cos ; sin = r/(r+h 3) ,
где угол между радиолучом от горизонтного НКА ( ) и местной вертикалью на высоте h 3 =400 км (середина эквивалентной ионосферы) ; r радиус Земли. Проводя вычисления, получим и соответственно R 2 =3,3 R 1 . Для пригоризонтного НКА ( =5 ...10) можно считать, что R 2 =3 R 1 .
Найдем величину n m для несущей частоты f=1600 МГц навигационного радиосигнала. В средних широтах в худший сезон (зимний день) в годы максимальной солнечной активности максимальная электронная концентрация на высотах 300...400 км может достигать N = 3,0 10 6 эл/см 3 , и соответственно для f=1,6 10 6 кГц получим
n m =3,8 10 -5 , R 1 =15 м, R 2 =45 м.
Ночью и летом ионосферные погрешности будут в несколько раз меньше. В годы минимальной солнечной активности ионосферные погрешности даже в зимний день в 5...6 раз меньше приведенных выше максимальных значений.
Обсудим перспективу, когда в системе ГЛОНАСС будут эксплуатироваться НКА второй модификации, которые будут излучать двухкомпонентный навигационный радиосигнал 1250 МГц вместо однокомпонентного радиосигнала 1250 МГц в НКА первой модификации. Соответственно появляется возможность проводить измерения навигационных параметров в двухдиапазонной НАП с использованием узкополосных радиосигналов 1600 МГц и1250 МГц для исключения ионосферных погрешностей измерений. Но при двухдиапазонном измерении псевдодальности значительно возрастут шумовые погрешности и погрешности из-за многолучевости по сравнении с однодиапазонной НАП (1600 МГц). На динамичных объектах с недетерминированной моделью движения (T 0 =1 с) нецелесообразно применять двухдиапазонные узкополосные навигационные радиосигналы 1600 МГц и 1250 МГц для определения координат объекта, поскольку в этом случае, как было показано выше:
1. шумовые погрешности псевдодальности до пригоризонтного НКА составят (S 2) = 12...22 м, т.е. превысят ионосферные погрешности измерений в однодиапазонной НАП в худший сезон (зимний день);
2. погрешности псевдодальности до пригоризонтного НКА, обусловленные многолучевостью, составят (S 2) = 9 м (в худшей ситуации), т.е. будут соизмеримы с ионосферными погрешностями в однодиапазонной НАП в худший сезон (зимний день).
На малодинамичных наземных объектах целесообразно применять двухдиапазонные узкополосные навигационные радиосигналы, поскольку в НАП на малодинамичных объектах можно длительно осреднять результаты измерений (T 0 =30 c) и снижать до необходимого уровня шумовые погрешности псевдодальности и погрешности из-за многолучевости.
Структура навигационных радиосигналов в системе ГЛОНАСС
В системе ГЛОНАСС каждый штатный НКА в ОГ постоянно излучает шумоподобные непрерывные навигационные радиосигналы в двух диапазонах частот 1600 МГц и 1250 МГц. В НАП навигационные измерения в двух диапазонах частот позволяют исключить ионосферные погрешности измерений.
Каждый НКА имеет цезиевый АСЧ, используемый для формирования бортовой шкалы (БШВ) и навигационных радиосигналов 1600 МГц и 1250 МГц.
Шумоподобные навигационные радиосигналы в ОГ НКА различаются несущими частотами. Поскольку для взаимноантиподных НКА в орбитальных плоскостях можно применять одинаковые несущие частоты, то для 24 штатных НКА минимально необходимое число несущих частот в каждом диапазоне частот равно 12. Данное утверждение достаточно очевидно, если иметь в виду наземных потребителей (сухопутных, морских, воздушных), поскольку в зоне радиовидимости наземного потребителя не могут одновременно находиться взаимно антиподные НКА. Космический потребитель может одновременно “видеть” взаимноантиподные НКА. Однако имеются два благоприятных обстоятельства.
Первое заключается в том, что из двух взаимноантиподных НКА хотя бы один будет находиться ниже местного горизонта по отношению к космическому потребителю. Практически невозможно применить на космическом объекте одну широконаправленную антенну, способную принимать навигационные радиосигналы от всех “видимых” НКА выше и ниже местного горизонта. Поэтому в НАП на космическом объекте применяют: либо одну широконаправленную антенну для приема навигационных радиосигналов от НКА, находящихся выше местного горизонта; либо несколько антенн и несколько приемников для приема навигационных радиосигналов от НКА, находящихся выше и ниже местного горизонта.
В обоих вариантах НАП на космическом объекте будет осуществлять эффективную пространственную селекцию навигационных радиосигналов от взаимноантиподных НКА.
Второе обстоятельство заключается в том, что в НАП в сеансе навигации осуществляется поиск несущей частоты каждого принимаемого навигационного радиосигнала в пределах узкой полосы ( 1 кГц) около прогнозируемого значения с учетом доплеровского сдвига несущей частоты. Доплеровский сдвиг может иметь максимальные значения 5 кГц в НАП на наземных объектах и 40 кГц в НАП на низкоорбитальных космических объектах. Следовательно, в НАП на космическом объекте осуществляется эффективная доплеровская селекция навигационных радиосигналов от радиовидимых НКА.
Таким образом, навигационные радиосигналы взаимноантиподных НКА с одинаковыми несущими частотами будут надежно разделены в НАП на космическом объекте за счет пространственной и доплеровской селекции.
Навигационный радиосигнал 1600 МГц двухкомпонентный. На заданной несущей частоте в радиопередатчике формируются два одинаковых по мощности шумоподобных фазоманипулированных навигационных радиосигнала “в квадратуре” (взаимный сдвиг по фазе на 90): узкополосный и широкополосный.
Узкополосный навигационный радиосигнал 1600 МГц образуется посредством манипуляции фазы несущего колебания на 180 периодической двоичной псевдослучайной последовательностью (ПСП1) с тактовой частотой F 1 = 0,511 МГц и с периодом повторения Т 1 = 1 мс (511 тактов). ПСП1 представляет собой М - последовательность с характеристическим полиномом 1 + X 3 + X 5 . Путем инвертирования ПСП1 передаются метки времени (МВ) бортовой шкалы времени (БШВ) НКА и двоичные символы цифровой информации (ЦИ). Метка времени имеет длительность 0,3 с и передается в конце каждого двухсекундного интервала времени (в конце четных секунд). Метка времени содержит 30 двоичных символов длительностью 10 мс и представляет собой укороченную на один символ 31-символьную М-последовательность.
В каждой двухсекундной строке на интервале времени 1,7 с передаются 85 двоичных символов ЦИ, длительностью 20 мс и перемноженные на меандр, имеющий длительность символов 10 мс. Границы символов меандра, МВ и ЦИ когерентны. В приемнике с помощью меандра осуществляется символьная синхронизация для МВ и с ее помощью строчная и символьная синхронизация ЦИ.
Широкополосный навигационный радиосигнал 1600 МГц образуется посредством манипуляции фазы несущего колебания на 180 периодической двоичной последовательностью ПСП2 с тактовой частотой F 2 =5,11 МГц. Путем инвертирования ПСП2 передаются двоичные символы ЦИ длительностью 20 мс.
Навигационный радиосигнал 1250 МГц, излучаемый НКА первой модификации однокомпонентный широкополосный шумоподобный радиосигнал, образуемый посредством манипуляции фазы несущего колебания на 180 периодической двоичной ПСП2 (F 2 = 5,11 МГц) без инвертирования, т.е. без передачи ЦИ. Навигационный радиосигнал 1250 МГц, излучаемый НКА второй модификации, будет содержать два одинаковых по мощности шумоподобных радиосигнала 1250 МГц в квадратуре:
1. узкополосный навигационный радиосигнал 1250 МГц с ПСП1 (F 1 = 0,511 МГц, T 1 =1 мс);
2. широкополосный навигационный радиосигнал 1250 МГц с ПСП2 (F 2 =5,11 МГц) без ЦИ.
Поскольку частота инвертирования ПСП много меньше ее тактовой частоты, то ширина основного “лепестка” огибающей спектра мощности шумоподобного фазоманипулированного навигационного радиосигнала равна двойному значению тактовой частоты ПСП. Следовательно, ширина основного “лепестка” огибающей спектра мощности узкополосного навигационного радиосигнала равна 1,022 МГц, широкополосного 10,22 МГц.
При проектировании СРНС ГЛОНАСС была выработана следующая “сетка” номинальных значений несущих частот для навигационных радиосигналов в двух диапазонах частот верхнем 1600 МГц (В) и нижнем 1250 МГц (Н):
вk = в0 +k в; в0 =1602,0000 МГц;
в =0,5625 МГц;
нk = н0 +k н; н0 =1246,0000 МГц;
н =0,4375 МГц;
вk / нk = 9/7 ;
где k условный порядковый номер пары несущих частот вk и нk для навигационных радиосигналов 1600 МГц и 1250 МГц.
Радиопередатчики навигационных радиосигналов в НКА первой модификации излучают навигационные радиосигналы на переключаемых несущих частотах с номерами k = 1, ... ,24.
Приведем значения крайних несущих частот навигационных радиосигналов:
в1 =1602,5625 МГц; в24 =1615,5000 МГц;
н1 =1246,4375 МГц; н24 =1256,5000 МГц;
Рабочие спектры навигационных радиосигналов на несущих частотах с номерами k = 1, ...,24 занимают полосы частот:
а) узкополосные навигационные радиосигналы 1602,0...1616,0 МГц;
б) широкополосные навигационные радиосигналы 1597,4... ...1620,6 МГц, 1241,3...1261,6 МГц.
В диапазоне частот 1600 МГц и 1250 МГц согласно Регламенту радиосвязи выделены полосы частот:
а) для спутниковой радиосвязи (Космос Земля) 1559,0...1610,0 МГц; 1215,0...1260,0 МГц;
б) для воздушной радионавигации 1559,0...1626,5 МГц.
ВАКР-87 распределил полосу частот 1610,6...1613,8 МГц для радиоастрономии на первичной основе. Чтобы снизить и в дальнейшем полностью исключить радиопомехи радиотелескопам в диапазоне частот 1610,6...1613,8 МГц со стороны навигационных радиосигналов системы ГЛОНАСС, Администрация системы ГЛОНАСС приняла в 1993г. решение, согласно которому для 24 штатных НКА в системе ГЛОНАСС будут использоваться следующие номера (k) несущих частот:
1. до1998 г. k = 1,...,15; k = 21,...,24;
2. c 1998 г. до 2005 г. k = 1,...,12;
3. c 2005 г. k = -7,...,4.
На первом этапе (до 1998 г.) в радиоастрономической полосе практически нет спектров узкополосных навигационных радиосигналов 1600 МГц, а к 2005 г. из радиоастрономической полосы будут выведены и спектры широкополосных навигационных радиосигналов. Третий этап будет реализован за счет применения НКА второй модификации, в которой передатчики навигационных радиосигналов могут излучать навигационные радиосигналы на любой паре переключаемых несущих частот с номерами k=-7,0,...+12.
В системе НАВСТАР используются непрерывные шумоподобные навигационные радиосигналы на двух несущих частотах (верхней и нижней)
в =1575,42 МГц; н =1227,6 МГц,
и применяется кодовое разделение навигационных радиосигналов для 24 штатных НКА.
Навигационный радиосигнал на верхней несущей частоте в двухкомпонентный, он содержит два фазоманипулированных шумоподобных навигационных радиосигнала в квадратуре (сдвиг по фазе на 90): узкополосный и широкополосный.
Узкополосный навигационный радиосигнал в образуется посредством манипуляции фазы несущего колебания на 180 периодической ПСП1 с тактовой частотой F 1 = 1,023 МГц и с периодом повторения T 1 = 1 мс. Двоичные символы ЦИ длительностью 20 мс передаются инвертированием ПСП1.
Широкополосный навигационный радиосигнал в образуется посредством манипуляции фазы несущего колебания на 180 периодической ПСП2 с тактовой частотой F 2 = 10,23 МГц. Двоичные символы ЦИ длительностью символов 20 мс передаются инвертированием ПСП2.
Навигационный радиосигнал н однокомпонентный, широкополосный, образован посредством манипуляции фазы несущего колебания на 180 периодической ПСП2 без инвертирования.
Широкополосные навигационные радиосигналы в системах НАВСТАР и ГЛОНАСС предназначены для использования санкционированными потребителями и имеют защиту от несанкционированного использования.
Узкополосные навигационные радиосигналы в системах НАВСТАР и ГЛОНАСС являются открытыми и предназначены для гражданских потребителей. Но в системе НАВСТАР эти сигналы искусственно искажаются с помощью процедуры селективного доступа, который ухудшает точность навигации для нелицензионных потребителей.
Точность глобальной навигации наземных подвижных объектов
Проведем оценку точности определения координат наземного подвижного объекта при глобальной оперативной навигации с помощью многоканальной НАП, использующей узкополосные навигационные радиосигналы с частотой 1600 МГц в системе ГЛОНАСС с полной ОГ штатных НКА.
Погрешность определения координат подвижного объекта зависит от геометрических факторов используемого в сеансе навигации созвездия радиовидимых НКА и обусловлены погрешностями ЭИ и ЧВП в кадрах ЦИ, принимаемых от НКА, и погрешностями измерений в НАП псевдодальностей до НКА.
При оценке точности координат подвижного объекта погрешности ЭИ и ЧВП можно пересчитать в эквивалентные погрешности псевдодальностей до НКА.
Погрешности координат НКА, пересчитанные в эквивалентные погрешности псевдодальности, есть проекции погрешностей координат НКА на направление от НКА до объекта. Обозначим: погрешности координат НКА в вертикальной и горизонтальной плоскостях. Из простых геометрических построений можно получить следующие формулы для пересчета погрешностей координат НКА в эквивалентные погрешности псевдодальностей (дальностей) от объекта до НКА:
1. для околозенитных НКА
S 1 = H 1 при ;
S 1 = H 1 +0,15 M 1 при 45 ;
2. для пригоризонтного НКА
S 2 = H 2 +0,25 M 2 при 2 0.
Погрешности ЭИ при прогнозе на сутки для НКА первой модификации (см. выше) в среднем составляют (H) = 4 м, (L) = 15 м, и, следовательно, эквивалентные погрешности псевдодальностей составят:
(S 1) = 4,0...4,6 м и (S 2) = 5,5 м.
Погрешность ЧВП при прогнозе на 12 ч для НКА первой модификации составляет Б = 14 нс и, соответственно, эквивалентная погрешность псевдодальности равна S) = 4,2 м.
При использовании узкополосных навигационных радиосигналов погрешности измерений псевдодальности для околозенитного S 1) и пригоризонтного S 2) НКА приведены выше.
Составим суммарный бюджет погрешностей псевдодальностей без ионосферы (который будем называть инструментальной погрешностью псевдодальности) для многоканальной НАП, использующей узкополосные однодиапазонные (1600 МГц) навигационные радиосигналы (T 0 = 1 с):
В шестиканальной НАП на наземном подвижном объекте максимальные (0,95) инструментальные погрешности определения местоположения объекта в горизонтальной p и вертикальной z плоскостях связаны с инструментальными погрешностями псевдодальности до “высокого” (околозенитного) НКА (S 1) и до “низкого” (пригоризонтного) НКА (S 2) следующим образом (см. выше):
в лучших ситуациях p = 2,0 (S 2); z = 2,0 (a);
в худших ситуациях p = 2,2 (S 2); z = 2,2 (a),
(a) = 1/2 .
Используя эти формулы и полученные выше значения инструментальных погрешностей псевдодальностей, найдем оценки максимальных инструментальных погрешностей определения местоположения наземных динамичных (T 0 =1 с) объектов при использовании узкополосных навигационных радиосигналов в однодиапазонной шестиканальной НАП (1600 МГц):
1. в лучших ситуациях (S 1) = 6,2 м; (S 1) = 7,7 м и соответственно p = 15,4 м; z = 34 м;
2. в худших ситуациях (S 1) = 6,6 м; (S 1) = 9,6 м и соответственно p = 21 м; z = 42 м.
Строгая оценка вклада ионосферных погрешностей определения координат наземного объекта при применении однодиапазонной НАП является достаточно сложной задачей, дадим приблизительный анализ.
В предыдущем разделе были оценены ионосферные погрешности измерения псевдодальностей в однодиапазонной НАП. Было показано, что ионосферная погрешность псевдодальности (дальности) до пригоризонтного НКА ( =5 10) равна R 2 =3 R 1 , где R 1 ионосферная погрешность дальности при вертикальном радиолуче. Ионосферные погрешности псевдодальностей в сеансе зависят от времени проведения сеанса: минимальны ночью, максимальны днем.
Пусть наземный объект находится под пересечением двух орбитальных колец, и в сеансе навигации используются шесть НКА: два околозенитных и четыре пригоризонтных. Очевидно, что если сеанс навигации проводится в околополуденное время, то ионосферные погрешности псевдодальностей для пригоризонтных НКА будут мало отличаться друг от друга и соответственно четыре разности между псевдодальностью до пригоризонтного и до зенитного НКА будут приблизительно одинаковы D = R 2 - R 1 =2 R 1 . В этой ситуации ионосферные погрешности определения координат наземного объекта в сеансе навигации в околополуденное время можно оценить как
z=2 D=4 R 1 ; x, y= 0,5 D= R 1 .
Если сеанс навигации проводится в утреннее или вечернее время, то ионосферные погрешности псевдодальностей до пригоризонтных НКА будут сильно отличаться, и для таких сеансов навигации ионосферные погрешности определения координат можно приблизительно оценить как: x, y, z = 2 R 1 , где R 1 ионосферная погрешность псевдодальности до зенитного НКА в дневное время.
Если наземный объект равноудален от трех орбитальных колец, то в сеансе навигации нет околозенитного НКА, и “высокие” НКА имеют углы возвышения 1 = 41 ... 45 . Ионосферные погрешности определения координат наземного объекта в таком сеансе навигации будут не больше, чем в сеансе, в котором имеется околозенитный НКА.
Таким образом, в сеансах навигации наземных объектов при использовании шестиканальной однодиапазонной НАП максимальные ионосферные погрешности определения координат объекта можно оценить следующим образом:
x, y = (1...2) R 1 ; z = (2...4) R 1 ,
где R 1 ионосферная погрешность при вертикальном радиолуче в дневное время.
В худший сезон (зимний день) в годы максимальной солнечной активности R 1 = 15 м. Следовательно, максимальные ионосферные погрешности определения местоположения наземного объекта составят
p = [( x) 2 +( y) 2 ] 1/2 = 21...42 м; z = 30...60 м.
Приведем полученные оценки максимальных суммарных (инструментальных и ионосферных) погрешностей глобальной навигации в СРНС ГЛОНАСС при использовании узкополосных навигационных радиосигналов 1600 МГц в шестиканальной НАП на динамичных (T 0 = 1с) наземных объектах в годы максимальной солнечной активности:
В годы минимальной солнечной активности ионосферные погрешности будут в 5...6 раз меньше, и соответственно максимальные суммарные погрешности глобальной навигации наземных подвижных объектов составят:
Спутник ГЛОНАСС
Спутник ГЛОНАСС конструктивно состоит из цилиндрического гермоконтейнера с приборным блоком, рамы антенно-фидерных устройств, приборов системы ориентации, панелей солнечных батарей с приводами, блока двигательной установки и жалюзи системы терморегулирования с приводами. На спутнике также установлены оптические уголковые отражатели, предназначенные для калибровки радиосигналов измерительной системы с помощью измерений дальности до спутника в оптическом диапазоне, а также для уточнения геодинамических параметров модели движения спутника. Конструктивно уголковые отражатели формируются в виде блока, постоянно отслеживающего направление на центр Земли. Площадь уголковых отражателей-0,25м2.
В состав бортовой аппаратуры входят:
· навигационный комплекс;
· комплекс управления;
· система ориентации и стабилизации;
· система коррекции;
· система терморегулирования;
· система электроснабжения.
Навигационный комплекс обеспечивает функционирование спутника как элемента системы ГЛОНАСС. В состав комплекса входят: синхронизатор, формирователь навигационных радиосигналов, бортовой компьютер, приемник навигационной информации и передатчик навигационных радиосигналов.
Синхронизатор обеспечивает выдачу высокостабильных синхрочастот на бортовую аппаратуру, формирование, хранение, коррекцию и выдачу бортовой шкалы времени.
Формирователь навигационных радиосигналов обеспечивает формирование псевдослучайных фазоманипулированных навигационных радиосигналов содержащих дальномерный код и навигационное сообщение.
Комплекс управления обеспечивает управление системами спутника и контролирует правильность их функционирования. В состав комплекса входят: командно-измерительная система, блок управления бортовой аппаратурой и система телеметрического контроля.
Командно-измерительная система обеспечивает измерение дальности в запросном режиме, контроль бортовой шкалы времени, управление системой по разовым командам и временным программам, запись навигационной информации в бортовой навигационный комплекс и передачу телеметрии.
Блок управления обеспечивает распределение питания на системы и приборы спутника, логическую обработку, размножение и усиление разовых команд.
Система ориентации и стабилизации обеспечивает успокоение спутника после отделения от ракеты-носителя, начальную ориентацию солнечных батарей на Солнце и продольной оси спутника на Землю, затем ориентацию продольной оси спутника на центр Земли и нацеливание солнечных батарей на Солнце, а также стабилизацию спутника в процессе коррекции орбиты. В системе используются прибор на основе инфракрасного построения местной вертикали (для ориентации на центр Земли) и прибор для ориентации на Солнце. Погрешность ориентации на центр Земли не хуже 3град., а отклонение нормали к поверхности солнечной батареи от направления на Солнце - не более 5град. Для минимизации возмущений на движение центра масс спутника разгрузка двигателей маховиков производится с помощью магнитопровода. В качестве исполнительного органа при осуществлении успокоения и стабилизации спутника во время выдачи импульса коррекции используется двигательная установка.
Режим успокоения, в результате которого происходит гашение угловых скоростей, включается в зоне радиовидимости.
В режиме начальной ориентации на Солнце осуществляется разворот спутника относительно продольной оси с помощью управляющих двигателей-маховиков до появления Солнца в поле зрения прибора ориентации на Солнце, который установлен на панели солнечных батарей.
Режим ориентации на Землю начинается из положения ориентации на Солнце путем разворота спутника с помощью двигателей-маховиков вдоль оси, ориентированной на Солнце, до появления Земли в поле зрения прибора ориентации на центр Земли. В штатном режиме обеспечивается ориентация оси спутника вместе с антеннами на центр Земли с помощью управляющих двигателей-маховиков по сигналам с приборов ориентации на центр Земли, ориентация солнечных батарей на Солнце путем разворота спутника вместе солнечными батареями с помощью управляющего двигателя-маховика по одному каналу и разворотов панелей батарей относительно корпуса спутника с помощью привода вращения солнечных батарей по другому каналу по сигналам приборов ориентации на Солнце.
В режиме ориентации перед проведением коррекции и стабилизации спутника во время выдачи импульса коррекции отслеживание ориентации на Солнце не производится.
Система коррекции обеспечивает приведение спутника в заданное положение в плоскости орбиты и его удержание в данных пределах по аргументу широты. Система включает двигательную установку и блок управления ей. Двигательная установка состоит из 24 двигателей ориентации с тягой 10 г и двух двигателей коррекции с тягой 500 г.
Система терморегулирования обеспечивает необходимый тепловой режим спутника. Регулирование тепла, отводимого из гермоконтейнера, осуществляется жалюзи, которые открывают или закрывают радиационную поверхность в зависимости от температуры газа. Отвод тепла от приборов осуществляется циркулирующим газом с помощью вентилятора.
Система электроснабжения включает солнечные батареи, аккумуляторные батареи, блок автоматики и стабилизации напряжения. Начальная мощность солнечных батарей - 1600 Вт, площадь - 17,5 м2.
При прохождении спутником теневых участков Земли и Луны питание бортовых систем осуществляется за счет аккумуляторных батарей. Их разрядная емкость составляет 70 ампер-часов.
Для обеспечения надежности на спутнике устанавливаются по два или по три комплекта основных бортовых систем.
Таким образом, на спутник ГЛОНАСС возложено выполнение следующих функций:
· излучение высокостабильных радионавигационных сигналов;
· прием, хранение и передача цифровой навигационной информации;
· формирование, оцифровка и передача сигналов точного времени;
· ретрансляция или излучение сигналов для проведения траекторных измерений для контроля орбиты и определения поправок к бортовой шкале времени;
· прием и обработка разовых команд;
· прием, запоминание и выполнение временных программ управления режимами функционирования спутника на орбите;
· формирование телеметрической информации о состоянии бортовой аппаратуры и передача ее для обработки и анализа наземному комплексу управления;
· прием и выполнение кодов/команд коррекции и фазирования бортовой шкалы времени;
· формирование и передача "признака неисправности" при выходе выжных контролируемых параметров за пределы нормы.
Управление спутниками ГЛОНАСС осуществляется в автоматизированном режиме.
Выведение спутников ГЛОНАСС на орбиту осуществляется носителем тяжелого класса "ПРОТОН" с разгонным блоком с космодрома Байконур. Носитель одновременно выводит три спутника ГЛОНАСС.
Схема выведения включает:
· выведение космической головной части на промежуточную круговую орбиту с высотой ~200 км;
· переход на эллиптическую орбиту с перигеем ~200 км, апогеем ~19100 км и наклонением 64,3град.
Перевод каждого спутника в заданную точку орбитальной плоскости проводится с помощью спутниковой двигательной установки.
Точность приведения в рабочую точку орбиты:
· по периоду обращения - 0,5 с;
· по аргументу широты - 1град.;
· по эксцентриситету - ~0,01;
· по наклонению орбиты - ~0,3град.
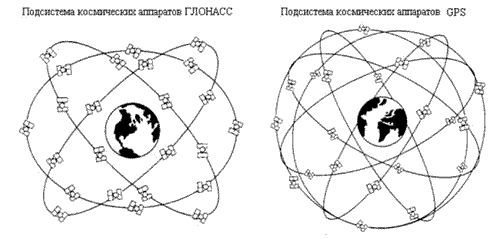
Космический сегмент систем ГЛОНАСС и GPS
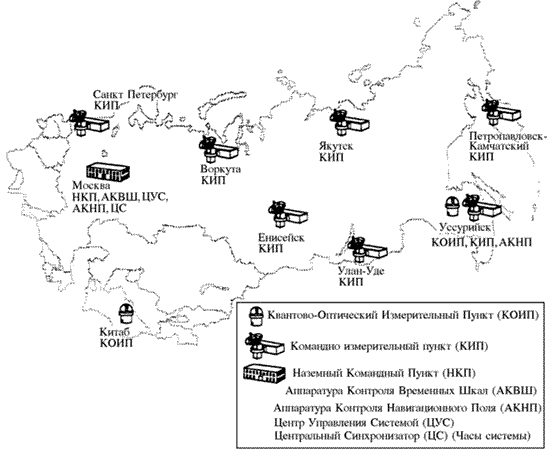
Структура навигационных радиосигналов системы GPS
В системе GPS используется кодовое разделение сигналов (СDMA), поэтому все спутники излучают сигналы с одинаковой частотой. Каждый спутник системы GPS излучает два фазоманипулированных сигнала. Частота первого сигнала составляет L1 = 1575,42 МГц, а второго - L2 = 1227,6 МГц. Сигнал несущей частоты L1 модулируется двумя двоичными последовательностями, каждая из которых образована путём суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных, формируемых со скоростью 50 бит/с. На частоте L1 передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р или засекреченного кода Y и навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/A (открытого) кода и той же последовательности навигационных данных.
Радиосигнал на частоте L2 бифазно манипулирован только одной из двух ранее рассмотренных последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли.
Каждый спутник использует свойственные только ему дальномерные коды С/A и Р(Y), что и позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
Состав и структура навигационных сообщений спутников системы GPS
Структурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, кадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12,5 мин). Один кадр передаётся в течение 30 с и имеет размер 1500 бит. Кадр разделён на 5 подкадров по 300 бит и передаётся в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6-с интервала системного времени GPS. Подкадр состоит из 10 30-бит слов. В каждом слове 6 младших разрядов являются проверочными битами.
В 1-, 2- и 3-м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид КА, с которым установлена связь. Содержание и структура этих подкадров остаются неизменными на всех страницах суперкадра. В 4- и 5-м подкадрах содержится информация о конфигурации и состоянии всех КА системы, альманахи КА, специальные сообщения, параметры, описывающие связь времени GPS с UTC, и прочее.
Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов
К сегменту потребителей систем GPS и ГЛОНАСС относятся приёмники сигналов спутников. По измерениям параметров этих сигналов решается навигационная задача. Приёмник можно разделить на три функциональные части:
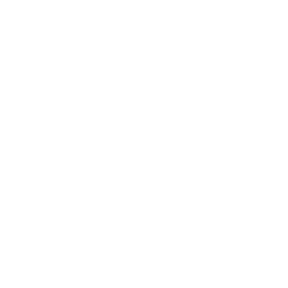 радиочастотную часть;
радиочастотную часть;
цифровой~коррелятор;
процессор.
С выхода антенно-фидерного устройства (антенны) сигнал поступает на радиочастотную часть Основная задача этой части заключается в усилении входного сигнала, фильтрации, преобразовании частоты и аналого-цифровом преобразовании. Помимо этого, с радиочастотной части приёмника поступает тактовая частота для цифровой части приёмника. С выхода радиочастотной части цифровые отсчёты входного сигнала поступают на вход цифрового коррелятора.
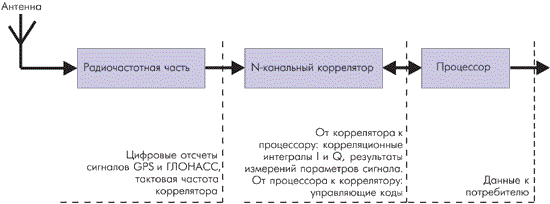
Обобщённая структура приёмника
В корреляторе спектр сигнала переносится на “нулевую” частоту. Это производится путём перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. Далее результат перемножения проходит корреляционную обработку путём перемножения с опорным дальномерным кодом и накоплением на периоде дальномерного кода. В итоге получаем корреляционные интегралы I и Q. Отсчёты корреляционных интегралов поступают в процессор для дальнейшей обработки и замыкания петель ФАП (фазовая автоподстройка) и ССЗ (схема слежения за задержкой). Измерения параметров сигнала в приёмнике производятся не непосредственно по входному сигналу, а по его точной копии, формируемой системами ФАП и ССЗ. Корреляционные интегралы I и Q позволяют оценить степень “похожести” (коррелированности) опорного и входного сигналов. Задача коррелятора, помимо формирования интегралов I и Q, - формировать опорный сигнал, согласно с управляющими воздействиями (кодами управления), поступающими с процессора. Кроме того, в некоторых приёмниках коррелятор формирует необходимые измерения опорных сигналов и передаёт их в процессор для дальнейшей обработки. В то же время, так как опорные сигналы в корреляторе формируются по управляющим кодам, поступающим с процессора, то необходимые измерения опорных сигналов можно производить непосредственно в процессоре, обрабатывая соответствующим образом управляющие коды, что и делается во многих современных приёмниках.
Какие параметры сигнала измеряет коррелятор (процессор)?
Дальность при радиотехнических измерениях характеризуется временем распространения сигнала от объекта измерения до измерительного пункта. В навигационных системах GPS/ГЛОНАСС излучение сигналов синхронизировано со шкалой времени системы, точнее, со шкалой времени спутника, излучающего данный сигнал. В то же время, потребитель имеет информацию о расхождении шкалы времени спутника и системы. Цифровая информация, передаваемая со спутника, позволяет установить момент излучения некоторого фрагмента сигнала (метки времени) спутником в системном времени. Момент приёма этого фрагмента определяется по шкале времени приёмника. Шкала времени приёмника (потребителя) формируется с помощью кварцевых стандартов частоты, поэтому наблюдается постоянный “уход” шкалы времени приёмника относительно шкалы времени системы. Разность между моментом приёма фрагмента сигнала, отсчитанным по шкале времени приёмника, и моментом излучения его спутником, отсчитанным по шкале спутника, умноженная на скорость света, называется псевдодальностью . Почему псевдодальностью? Потому что она отличается от истинной дальности на величину, равную произведению ско-рости света на “уход” шкалы времени приёмника относительно шкалы времени системы. При решении навигационной задачи этот параметр определяется наравне с координатами потребителя (приёмника).
Корреляционные интегралы, формируемые в корреляторе, позволяют отследить модуляцию сигнала спутника символами информации и вычислить метку времени во входном сигнале. Метки времени следуют с периодичностью 6 с для GPS и 2 с для ГЛОНАСС и образуют своеобразную 6(2)-секундную шкалу. В пределах одного деления этой шкалы периоды дальномерного кода образуют 1-мс шкалу. Одна миллисекунда разделена, в свою очередь, на отдельные элементы (chips, в терминологии GPS): для GPS - 1023, для ГЛОНАСС - 511. Таким образом, элементы дальномерного кода позволяют определить дальность до спутника с погрешностью » 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0,01 периода, что составляет точность определения псевдодальности 3 м.
На основании измерений параметров опорного гармонического колебания, формируемого системой ФАП, определяют частоту и фазу несущего колебания спутника. Его уход относительно номинального значения даст доплеровское смещение частоты, по которому оценивается скорость потребителя относительно спутника. Кроме того, фазовые измерения несущей позволяют уточнить дальность до спутника с погрешностью в несколько мм.
Для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника. Для того, чтобы потребитель мог определить координаты спутников, излучаемые ими навигационные сигналы моделируются сообщениями о параметрах их движения. В аппаратуре потребителя происходит выделение этих сообщений и определение координат спутников на нужный момент времени.
Координаты и составляющие вектора скорости меняются очень быстро, поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах и составляющих вектора скорости, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения КА на достаточно большом интервале времени (около 30 минут). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации.
Параметры аппроксимирующей мо-дели входят в состав навигационных сообщений спутников. В системе GPS используется Кеплеровская модель движения с оскулирующими элементами. В этом случае траектория полёта КА разбивается на участки аппроксимации длительностью в один час. В центре каждого участка задаётся узловой момент времени, значение которого сообщается потребителю навигационной информации. Помимо этого, потребителю сообщают параметры модели оскулирующих элементов на узловой момент времени, а также параметры функций, аппроксимирующих изменения параметров модели оскулирующих элементов во времени как предшествующем узловому элементу, так и следующем за ним.
В аппаратуре потребителя выделяется интервал времени между моментом времени, на который нужно определить положение спутника, и узловым моментом. Затем с помощью аппроксимирующих функций и их параметров, выделенных из навигационного сообщения, вычисляются значения параметров модели оскулирующих элементов на нужный момент времени. На последнем этапе с помощью обычных формул кеплеровской модели определяют координаты и составляющие вектора скорости спутника.
В системе Глонасс для определения точного положения спутника используются дифференциальные модели движения. В этих моделях координаты и составляющие вектора скорости спутника определяются численным интегрированием дифференциальных уравнений движения КА, учитывающих конечное число сил, действующих на КА. Начальные условия интегрирования задаются на узловой момент времени, располагающийся посередине интервала аппроксимации.
Как было сказано выше, для определения координат потребителя необходимо знать координаты спутников (не менее 4) и дальность от потребителя до каждого видимого спутника, которая определяется в навигационном приёмнике с точностью около 1 м. Для удобства рассмотрим простейший “плоский” случай, представленный на рис. 8.
Определение координат потребителя
Каждый спутник можно представить в виде точечного излучателя. В этом случае фронт электромагнитной волны будет сферическим. Точкой пересечения двух сфер будет та, в которой находится потребитель.
Высота орбит спутников составляет порядок 20000 км. Следовательно, вторую точку пересечения окружностей можно отбросить из-за априорных сведений, так как она находится далеко в космосе.
Дифференциальный режим
Спутниковые навигационные системы позволяют потребителю получить координаты с точностью порядка 10–15 м. Однако для многих задач, особенно для навигации в городах, требуется большая точность. Один из основных методов повышения точности определения местонахождения объекта основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим DGPS (Differential GPS) позволяет установить координаты с точностью до 3 м в динамической навигационной обстановке и до 1 м - в стационарных условиях. Дифференциальный режим реализуется с помощью контрольного GPS-приёмника, называемого опорной станцией. Она располагается в пункте с известными координатами, в том же районе, что и основной GPS-приёмник. Сравнивая известные координаты (полученные в результате прецизионной геодезической съёмки) с измеренными, опорная станция вычисляет поправки, которые передаются потребителям по радиоканалу в заранее оговоренном формате.
Аппаратура потребителя принимает от опорной станции дифференциальные поправки и учитывает их при определении местонахождения потребителя.
Результаты, полученные с помощью дифференциального метода, в значительной степени зависят от расстояния между объектом и опорной станцией. Применение этого метода наиболее эффективно, когда преобладающими являются систематические ошибки, обусловленные внешними (по отношению к приёмнику) причинами. По экспериментальным данным, опорную станцию рекомендуется располагать не далее 500 км от объекта.
В настоящее время существуют множество широкозонных, региональных и локальных дифференциальных систем.
В качестве широкозонных стоит отметить такие системы, как американская WAAS, европейская EGNOS и японская MSAS. Эти системы используют геостационарные спутники для передачи поправок всем потребителям, находящимся в зоне их покрытия.
Региональные системы предназначены для навигационного обеспечения отдельных участков земной поверхности. Обычно региональные системы используют в крупных городах, на транспортных магистралях и судоходных реках, в портах и по берегу морей и океанов. Диаметр рабочей зоны региональной системы обычно составляет от 500 до 2000 км. Она может иметь в своём составе одну или несколько опорных станций.
Локальные системы имеют максимальный радиус действия от 50 до 220 км. Они включают обычно одну базовую станцию. Локальные системы обычно разделяют по способу их применения: морские, авиационные и геодезические локальные дифференциальные станции.
Развитие спутниковой навигации
Общее направление модернизации обоих спутниковых систем GPS и Глонасс связано с повышением точности навигационных определений, улучшением сервиса, предоставляемого пользователям, повышением срока службы и надёжностью бортовой аппаратуры спутников, улучшением совместимости с другими радиотехническими системами и развитием дифференциальных подсистем. Общее направление развития систем GPS и Глонасс совпадает, но динамика и достигнутые результаты сильно отличаются.
Совершенствование системы ГЛОНАСС планируется осуществлять на базе спутников нового поколения “ГЛОНАСС-М”. Этот спутник будет обладать увеличенным ресурсом службы и станет излучать навигационный сигнал в диапазоне L2 для гражданских применений.
Аналогичное решение было принято в США, где 5 января 1999 года объявлено о выделении 400 млн. долл. на модернизацию системы GPS, связанную с передачей C/A-кода на частоте L2 (1222,7 МГц) и введением третьей несущей L3 (1176,45 МГц) на КА, которые будут запускаться с 2005 года. Сигнал на частоте L2 намечено использовать для гражданских нужд, не связанных непосредственно с опасностью для жизни людей. Предлагается начать реализацию этого решения с 2003 года. Третий гражданский сигнал на частоте L3 решено использовать для нужд гражданской авиации.
Список сокращений
АКНП - аппаратура контроля навигационного поля
АКС - бортовая аппаратура командной системы
АСЧ – атомные стандарты частоты
БИС – беззапросная измерительная станция
БВК - бортовой вычислительный комплекс
БНП - бортовой навигационный передатчик
БТС - бортовая телеметрическая система
БУ - блок управления
БУК - бортовой управляющий комплекс
БХ - бортовой хронизатор
БЦ – баллистический центр
БШВ – бортовая ШВ
ГВМ – габаритно-весовой макет
СРНС – спутниковая радионавигационная система
ДН - диаграмма направленности
ЕС КВО – Единая глобальная система координатно-временного обеспечения
ЗИС – запросная измерительная станция
ЗРВ - зона радиовидимости
КА – космический аппарат
КИС – командно-измерительная станция
КОС - кванто-оптические станции
КС - контрольные станции
ЛДПС – локальная дифференциальная подсистема
МБР – межконтинентальная баллистическая ракета
МВ - метка времени
НАП – навигационная аппаратура потребителей
НКА – навигационный КА
НКУ – наземный комплекс управления
НСВТ – навигационный сгнал высокой точности
НССТ – навигационный сигнал средней точности
ОГ – орбитальная группировка
ПСП – псевдослучайная последовательность
ПКУ - подсистемы контроля и управления
РВСН – ракетные войска стратегического назначения
СК - система коррекции
СКФ - система контроля фаз
СО - система ориентации и стабилизации
СК - система коррекции
СЭП - система электропитания
ФМ - фазовая манипуляция
ЧВО – частотно-временное обеспечение
ЧВП – частотно-временная поправка
ЦИ – цифровая информация
ЦС –центральный синхронизатор
ЦУС - центр управления системой ГЛОНАСС
ШВ – шкала времени
ЭИ – эфемеридная информация
ЭО –эфемеридное обеспечение
UTC – координированное всемирное время
Используемая литература
1. Радиотехнические системы. Под ред. Казаринова Ю.М. М.: Высшая школа, 1990.
2. Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000.
3. Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. М.: ИПРЖР, 1998.
4. Липкин И.А. Спутниковые навигационные системы. М.: Вузовская книга, 2001.
5. Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. М.: КНИЦ ВКС, 1995.