Использование навигационных систем. Аналитический обзор состояния и тенденций развития спутниковых систем телекоммуникаций. Классификация и основные показатели
Спутниковые навигационные системы
| Стр. | ||
| Термины .………….……………………………………………………………….. | 2 | |
| Аббревиатуры ……………………………………………………………………... | 3 | |
| Краткий обзор спутниковых системы навигации ……………………………. | 4 | |
| ……………….. | 6 | |
| Физико-технические принципы функционирования СНС ……………………… | 6 | |
| Основные уравнения в алгоритмах СНС …………………………………………. | 11 | |
| Основные преимущества СНС …………………………………………………… | 14 | |
| О бщие сведения о СНС …………………………………………………………... | 16 | |
| Организация и основные технические данные СНС …………………………….. | 16 | |
| Общие принципы функционирования СНС ……………………………………… | 17 | |
| Классификация приемо-индикаторов СНС …………………………………… | 19 | |
| Функциональные дополнения …………………………………………………... | 23 | |
| Дифференциального метода корректировки спутникового сигнала …………… | 23 | |
| Системы функционального дополнения …………………………………………. | 25 | |
| Б ортовое оборудование СНС …………………………………………………… | 29 | |
| Типы оборудования ……………………………………………………………….. | 29 | |
| Информация представляемая СНС……………………………………………….. | 30 | |
| Основные режимы работы приемоиндикаторов СНС …………………………... | 32 | |
| Использование GPS NOTAM ……………………………………………………... | 34 | |
| Использование функции RAIM …………………………………………………… | 36 | |
| Изменение чувствительности индикатора боковых отклонений ………………. | 37 | |
| Б азы навигационных данных …………………………………………………... | 39 | |
| Литература ………………………………………………………………………….. | 41 |
| ГЛОНАСС | ||
| КИНО | Комплексный индикатор навигационной обстановки | |
| СВС | Система воздушных сигналов | |
| ADS | Automatic Dependent Surveillance | Автоматическое зависимое наблюдение |
| CDI | Course Deviation Indicator | Указатель отклонения от линии заданного пути |
| DOP | Dilution of Precision | Снижение точности |
| FMS | Flight Management System | Система управления полетом |
| FTE | Flight Technical Error | Погрешность, обусловленная техникой пилотирования |
| GDOP | Geometric Dilution of Precision | Геометрическое снижение точности |
| GNSS | Global Navigation Satellite System | Глобальная навигационная спутниковая система |
| GLS | GNSS Landing System | Посадочная система с применением глобальной системы определения местоположения |
| GPS | Global Positioning System | Глобальная система определения местоположения |
| HDOP | Horizontal Dilution of Precission | Снижение точности определения горизонтального местоположения |
| HSI | Horizontal Situation Indicator | Плановый навигационный прибор (ПНП) |
| IAF | Initial Approach Fix | Контрольная точка начального этапа захода на посадку |
| JAA | Joint Aviation Authorities | Объединенные авиационные власти (государств ЕС) |
| RNAV | Area Navigation | Зональная навигация |
| RNP | Required Navigation Performance | Требуемые навигационные характеристики |
| S/A | Selective Availability | Селективный доступ |
| SID | Standard Instrument Departure | Стандартный маршрут вылета по приборам |
| STAR | Standard Terminal Arrival Route | Стандартный маршрут прибытия по приборам |
| TSO-C129 | Technical Standard Order - Circular 129 | Стандартизированные требования - Циркуляр 129 |
| VDОP | Vertical Dilution of Precision | Снижение точности определения местоположения по вертикали |
1. краткий обзор спутниковых систем навигации
Запускпервого в мире советского искусственного спутника Земли (ИСЗ) состоялся 4 октября 1957 г. В 1959 г. на орбиту выведен американский первый навигационный искусственный спутник Земли, а в 1964 г. вступила в эксплуатацию низкоорбитальная система Transit («Транзит») для обеспечения американских атомных ракетных подводных лодок «Поларис». В 1967 года в СССР был выведен на орбиту первый навигационный спутник «Космос-192» с целью создания низкоорбитальной системы СНС «Циклон». Полностью система введена в эксплуатацию в 1976 г. в составе шести космических аппаратов. В 1976 был разработан гражданский вариант навигационной системы для нужд торгового морского флота, получивший название «Цикада».Первый спутник системы GPS США был выведен на орбиту 22 февраля 1979 г. Создание группировки GPS было закончено в 1989 г.
Первый спутник системы ГЛОНАСС был запущен в СССР 12 октября 1982 г. Официальное введение системы ГЛОНАСС в действие состоялось 24 сентября 1993 г. В январе 1994 г. система состояла из 24 спутников. В период 1995 – 2004 годы количество уменьшалось до 12. В 2004 г. началось восстановлении группировки.
Галилео (Galileo) - европейский проект СНС. Европейская система предназначена для решения навигационных задач для любых подвижных объектов с точностью менее одного метра. Ожидается, что Галилео войдёт в строй в 2013 г., когда на орбиту будут выведены все 30 запланированных спутников (27 операционных и 3 резервных). Космический сегмент будет дополнен наземной инфраструктурой, включающей в себя два центра управления и глобальную сеть передающих и принимающих станций. Первый опытный спутник системы Галилео был запущен 28 декабря 2005 г. на расчётную орбиту высотой более 23000 км с наклонением 56°. Ни одно государство не может и не хочет в своем развитии зависеть в какой-либо области от другого, хотя и дружественного в данный момент, государства. Поэтому поиск альтернативы GPS и ГЛОНАСС привел к созданию GALILEO.14 апреля 2007 г. состоялся первый запуск китайского навигационного спутника "Бэйдоу" (Большая Медведица) для создания СНС Compass. 14 апреля 2009 г. орбиту был выведен второй навигационный спутник на геостационарную орбиту. Развертываемая Китаем подсистема GNSS, предназначенная для использования только в этой стране. Завершить создание космической навигационной системы КНР намеревается к 2015 г. Космический сегмент СНС будет сформирован из 5 спутников на геостационарной орбите и 30 спутников на средней земной орбите. Система будет полностью совместима с российской "ГЛОНАСС", Европейской "Галилео" и американской GPS.
В течение прошлого века навигация имеет много изменений с введением авиации. Первые формы навигации основывались на знании области и способности распознавать ориентиры и особенности земли. При путешествии по морю это было не очень полезно, и корабли использовали звезды, солнце и время, чтобы найти свой путь через большие участки воды. У небесной навигации тоже были свои ограничения, самая большая, конечно, погода. Оба этих метода навигации основывались на мертвом расчете, вычисляя приблизительную оценку расстояния и направления расстояния.
Индийская региональная навигационная спутниковая система (Indian Regional Navigation Satellite System), сокращённо IRNSS. Первый спутник запущен в 2008 г. Спутниковая группировка IRNSS будет состоять из семи спутников на геосинхронных орбитах. Причем четыре спутника из семи в IRNSS будут размещены на орбите с наклонением в 29 о по отношению к экваториальной плоскости. Проектная дата завершения работ 2011 г. IRNSS будет обеспечивать только региональное покрытие самой Индии и частей сопредельных государств. Японская Quasi-Zenith навигационная система (QZSS) . Планируемая дата запуска первого спутника в августе 2010 г. Всего в спутниковый сегмент войдут 3 спутника, орбиты которых будут выбраны таким образом, чтобы их подспутниковые точки описывали на земной поверхности одну и ту же траекторию с одинаковыми временными интервалами. При этом, по крайней мере, один спутник будет виден под углом места более 70º в любое время на территории Японии и Кореи. Эта особенность и определила название навигационной системы - Quasi-Zenith («Квази-зенитная»). Эта особенность важна для гористой местности или городов с высокими зданиями. В ближайшей перспективе будут одновременно работать три глобальных навигационных спутниковых системы GPS, ГЛОНАСС и GALILEO. Практически во всех странах в настоящее время широко используется только GPS, нормальное функционирование которой целиком зависит от правительства США. Использование спутниковых навигационных систем (СНС) для целей навигации приносит значительные преимущества по сравнению с обычными навигационными средствами. СНС характеризуются более высокой точностью по сравнению с эксплуатируемыми в настоящее время системами. В сочетании с системами передачи данных “воздух-земля” СНС позволяет осуществлять автоматическое зависимое наблюдение (ADS) в любом районе воздушного пространства. Внедрение СНС и возможное в будущем снятие с эксплуатации наземных навигационных средств позволит существенно повысить регулярность, эффективность, экономичность и безопасность полетов воздушного транспорта. В связи с тем, что в практической деятельности используется GPS и ГЛОНАСС, то далее они будут рассмотрены подробно.
Области применения данных дистанционного зондирования
Это дало навигаторам место для начала, подтверждая свое местоположение. Процесс мертвого расчета был улучшен с использованием акселерометров, действующих в 3-х ортогональных направлениях, для вычисления пройденного расстояния и направления. Это все еще было связано с множеством ограничений. Это было известно как инерциальные навигационные системы. Следующий большой шаг пришел с открытием радиоволн. Это открытие приводит к возможности ссылки на местоположение объекта на стационарное устройство. Затем появилась возможность ввода пространства.
Основные принципы определения места воздушного судна
Это относится ко всей системе, которая включает инфраструктуру, пользователей, управление и приложения, которые используют одну из систем. Каждый спутник знает свое собственное положение и время относительно земли. Затем блок посылает сигнал нескольким спутникам, которые допрашивают его, получая как положение спутника, так и информацию для вычисления расстояния от него. Как только устройство имеет по меньшей мере 3 спутника, оно может выработать свое положение. Чтобы получить фактическую высоту над землей, требуется, по меньшей мере, 4 спутника.
Рис. 2.1. Определение позиции ВС по спутникам
Дальности D 1 и D 2 до двух спутников определяют две поверхности положения, пересечение которых определяет линию положения в виде окружности. Поверхность положения, полученная с помощью третьего спутника в виде сферы с радиусом может иметь пересечение с линией положения в виде окружности, полученной от первых двух спутников, только в двух точках М 1 и М 2 . Таким образом, измеренные дальности до трех спутников ограничивают возможную позицию двумя возможными точками. Методом логического исключения определяется, какая из двух точек является позицией приемника СНС. Например, если одна из точек слишком далеко от поверхности Земли, или имеет слишком большую скорость перемещения относительно земной поверхности, или находится на очень большом удалении от ранее определенной позиции, то такая точка не может быть искомой позицией. В компьютеры бортовой аппаратуры заложено несколько алгоритмов, позволяющих отличить правильную позицию от ложной. Определение дальности D от спутника до приемника СНС выполняется в результате измерения времени прохождения радиосигнала от спутника до потребителя СНС сигналов по формуле:
Чем больше спутников, устройство находится в контакте с более точной позицией. С более чем 5 спутниками некоторые устройства имеют функцию определения точности спутника и знают, не работают ли они. Как только устройство имеет свою позицию, его можно использовать несколькими способами. Следует отметить, что устройства всегда предоставляют информацию. Для вычисления и отображения информации требуется время. Позиция будет отличаться в зависимости от скорости устройства. Точность может уменьшаться с увеличением скорости.
Службы спутниковой связи
Чтобы преодолеть эту проблему, устройству необходимо будет узнать время, в которое были отправлены сигналы. Информация о положении может также поступать от «наземных спутников», которые являются единицей на земле, которая действует как спутник, что помогает сократить время ошибки или, другими словами, недостаточно спутников. Эти наземные спутники используются в авиации, чтобы повысить надежность обслуживания, чтобы летательные аппараты использовали их для посадки в условиях очень низкой видимости.
D = c t,
Где: c - скорость распространения радиосигнала; t - время прохождения радиосигнала. Для дальностей порядка D = 21000 км и скорости c = 300000 км/сек время прохождения сигнала t = 0,07 сек. Поэтому в аппаратуре потребителя должно быть обеспечено высокоточное измерение весьма малых промежутков времени. Для определения времени прохождения радиосигнала от спутника до приемника сигналов использован метод сравнения псевдослучайных кодов, генерируемых в аппаратуре спутника и приемника СНС. В самых общих чертах данный метод состоит в следующем. Аппаратура спутников и приемников синхронизирована с очень высокой точностью. И на спутниках, и в приемниках одновременно генерируются одинаковые последовательности весьма сложных цифровых кодов. Эти коды настолько сложны, что внешне выглядят как длинные цепочки случайных импульсов, которые принято называть псевдослучайными кодами. А так как аппаратура спутников и приемников генерирует одинаковые коды в одни и те же моменты времени, то время прохождения сигнала от спутника до приемника определяется по задержке принятого кода (рис. 4.2). Генерируемые псевдослучайные коды повторяются каждую микросекунду, т.е. через каждые сек.
Самой известной является навигация. С возможностью определения местоположения можно использовать эту информацию против карт для разработки, если бы вы были. Эти устройства можно найти в самолетах, лодках и кораблях, оборудовании, персональном использовании и даже космических аппаратах. Существуют также устройства для слабовидящих. Однако устройства используются для других сценариев, чем для навигации. Например, эта информация полезна для поиска и спасения людей.
Вот список других глобальных навигационных спутниковых систем также в разработке. С 5 спутниками уже на месте с более запланированными. Однако после их краха система была оставлена гнить. В последнее время система была восстановлена. Это стремление Индии присоединиться к числу систем, плавающих в космосе.
Рис. 2.2. Измерение времени прохождения сигнала от спутника
Большинство СНС приемников обеспечивают измерение времени с точностью до Δ t = 10 -9 сек (т.е. до одной наносекунды). Для высокоточного определения позиции ВС необходимо, чтобы точность синхронизации часов на спутниках и в аппаратуре потребителей соответствовала потребной точности измерения времени прохождения радиосигнала от спутника до приемника. На спутниках устанавливаются комплекты из четырех высокоточных атомных часов и, кроме того, эти часы корректируются наземными станциями управления. В СНС приемниках устанавливаются сравнительно неточные кварцевые часы. Погрешность определения момента времени t по часам приемника по сравнению с отсчетом на часах спутников определяется компьютером аппаратуры потребителя в результате вычисления по специальному алгоритму. Предположим, что спутники и приемник СНС находятся в одной плоскости. Если t = 0 , т.е. нет погрешностей в измерении времени прохождения радиосигнала одновременно от трех спутников, то линии положения пересекутся в одной точке. В тех же случаях, когда погрешность t , то вычисленные линии положения будут отстоять от фактических линий положения на величину c t и образовывать некоторую область возможных положений приемника СНС (область погрешностей). Размеры этой области определяются величиной c t и углами пересечения линий положения. По специальному алгоритму в компьютере приемника СНС после серии измерений обеспечивается вычисление величины t , которая становится третьей координатой, определяющей позицию приемника на плоскости (рис. 2.3).
Коммерческий класс
Эти станции действуют как спутник, предоставляя очень точные данные воздушным судам для борьбы с избирательной доступностью, которая представляет собой проблему для точной навигации, необходимой в некоторых коммерческих отраслях, таких как авиация. Они лучше всего подходят для навигации по месту в поле или для простого определения координат точки. Базовые карты обычно недостаточно подробны для навигации и рекомендуется покупка подробных карт.
Этот параметр усреднения следует использовать, если он доступен. Существует несколько способов применения этих исправлений. Один из методов заключается в последующей обработке данных после их сбора данными из соседней базовой станции, таких как постоянно действующая опорная станция, которые управляются Национальным геодезическим обзором. Эта пост-обработка обычно завершается с использованием программного обеспечения поставщика, однако чаще используются исправления в реальном времени. Типы поправок в реальном времени, которые могут быть использованы, зависят от единицы оценки отображения.

Рис. 2.3. Влияние на определение позиции ВС погрешности во времени
Для вычисления погрешности в определении времени по часам приемника СНС и местоположения приемника СНС в пространстве (т.е. в системе трех координат) необходимо одновременное измерение расстояний до четырех спутников. При этом погрешность во времени t является некоторой четвертой координатой, и, следовательно, четыре поверхности положения в виде сфер с радиусами, равными соответствующим дальностям от четырех спутников, определяют некоторую область возможных положений приемника СНС. Таким образом, для высокоточного определения позиции ВС в реальном масштабе времени необходимо сочетание многоканального приемника и быстродействующего компьютера. Приемник обеспечивает одновременный прием сигналов от четырех спутников, компьютер вычисляет погрешность часов t и координат приемника в выбранной системе координат. В тех случаях, когда возможен прием сигналов только от трех спутников, то в алгоритмах аппаратуры потребителей СНС в качестве четвертого спутника принимается центр Земли, следовательно, одной поверхностью положения является сфера с радиусом, равным расстоянию от центра Земли до ВС (до приемника СНС). Расстояние от центра Земли до поверхности общеземного эллипсоида вычисляется компьютером аппаратуры потребителя СНС, а расстояние от поверхности эллипсоида до ВС (абсолютная высота) вводится в компьютер автоматизировано или вручную от бортовых систем ВС. Высокоточное определение местоположения ВС возможно только при условии точного вычисления координат навигационных спутников на момент измерения расстояний до спутников. Рабочие орбиты спутников выбраны такими, чтобы была обеспечена высокая точность сохранения спутниками заданных орбит и периода обращения относительно центра Земли. Эфемериды спутников (параметры, определяющие их положение на орбите) определяются и уточняются с помощью наземного командно-измерительного комплекса. Информация об эфемеридах всех спутников в виде так называемого "альманаха" вводится в память компьютера аппаратуры потребителя СНС сигналов. И, следовательно, компьютер обеспечивается данными для вычисления координат спутников на любой момент времени. Но так как под воздействием гравитационных пульсаций Луны и Солнца и давления солнечного излучения на поверхность спутника возникают изменения в эфемеридах спутника, то на наземном командно-измерительном комплексе определяются эфемеридные ошибки, которые передаются на спутник. В сигналах, передаваемых спутником, содержится информация об эфемеридных ошибках данного спутника. Данные об эфемеридах спутника, содержащиеся в альманахе, и информация об эфемеридных ошибках обеспечивают высокоточное вычисление координат спутника компьютером приемника СНС. Возможная точность измерения расстояния до спутника оценивается суммарной средней квадратической погрешностью в определении расстояния до спутника = 5-10 м . Точность определения координат позиции приемника СНС определяется не только величинами погрешностей в измерении расстояний до спутников, но и взаимным расположением поверхностей положения приемника СНС, т.е. взаимным расположением спутников. Предположим, что два спутника и приемник СНС расположены в одной плоскости (рис. 4.4). Обе линии положения определяются с погрешностью D . Тогда область возможного положения приемника СНС будет значительно меньше при угле пересечения линий положения, близком к (рис. 2.4 а), чем при угле пересечения, близком к (рис. 2.4 б). Возможная погрешность в определении координат за счет так называемого "геометрического фактора" может возрасти в несколько раз.
Часто картографическое программное обеспечение необходимо приобретать отдельно. Они в сочетании с очень точной подпиской с дифференциальной коррекцией дают лучшее дифференциально скорректированное положение. Эти двухчастотные приемники ограничивают влияние задержек ионосферы и повышают надежность обработанных результатов по сравнению с длинными базовыми линиями. Ресиверы должны иметь достаточную память и мощность аккумулятора для записи 6 часов данных в 5-секундные эпохи. Все приемники должны быть обновлены с помощью прошивки последнего производителя после обсуждения оборудования и использования с представителем компании для обеспечения совместимости.
Рис. 2.4. Влияние на определение позиции ВС “геометрического фактора”
При измерении расстояний до четырех спутников погрешности D также определяют область возможного нахождения приемника СНС, и точность определения координат находится в большой зависимости от взаимного расположения спутников. Если в поле зрения антенны приемника СНС находится более четырех спутников, то по определенному алгоритму могут быть выбраны четыре спутника, взаимное расположение которых обеспечивает в данный момент наибольшую точность вычисления позиции ВС. Для оценки влияния взаимного расположения спутников и приемника СНС на точность определения координат используется критерий GDOP – Geometric Delution of Precision (Геометрическое снижение точности, "геометрический фактор"). Геометрический фактор GDOP , как правило, обозначается аббревиатурой DOP (в некоторых приемниках СНС этот критерий обозначается PDOP - Position Delution of Precision). Геометрическое снижение точности (GDOP) – относительная величина ошибки определения местоположения с помощью системы, формирующей несколько семейств боковых поверхностей положения. Точнее говоря, это - отношение среднеквадратической ошибки определения местоположения к среднеквадратическому значению ошибок измерения в предположении, что все составляющие ошибки измерения статистически независимы, имеют нулевое математическое ожидание и одно и то же стандартное распределение. GDOP представляет собой показатель совершенства, с точки зрения наблюдателя, геометрических характеристик расположения источников сигналов, формирующих указанные боковые поверхности положения. Низкое значение GDOP является желательным, высокое - нет. Величина критерия DOP определяется из следующих соображений. Если позиции четырех спутников: S 1 , S 2 , S 3 , S 4 , и потребителя M (рис. 2.5) рассматривать как вершины многогранника, соединив их прямыми линиями, то будет очерчен некоторый объем V . И чем лучше взаимное расположение спутников для пеленгования, тем будет больше объем V такого многогранника, определяющий величину DOP.
Неправильные смещения могут привести к погрешности до 10 см в результатах опроса. Если возможно, все штативы должны быть одинаковой высоты, любой другой штатив с фиксированной высотой на проекте, поэтому устраняются ошибки измерения и записи. Кроме того, полевой персонал должен следить за тем, чтобы пузырь уровня находился в настройке, центральный стержень не согнут или не поврежден, высота центрального стержня правильная, как сообщается, и ноги надежно закреплены. Ровинговые стойки также должны быть фиксированной высоты или установлены на согласованную высоту и измерены в поле для проверки высоты.
Рис. 2.5. Многогранник, определяющий “геометрический фактор”
Величина критерия DOP принимается обратно пропорциональной объему V с учетом некоторого коэффициента пропорциональности k :
DOP = k /V .
Величина DOP
, как правило, колеблется от единицы до 10. Считается, что при DOP
4
обеспечивается высокая точность определения позиции ВС. Используя сведения из Альманаха, компьютер в аппаратуре потребителя непрерывно вычисляет критерий DOP
, определяя лучшую четверку, как правило, из шести-восьми спутников. Средняя квадратическая радиальная погрешность в определении позиции ВС с учетом геометрического фактора может быть оценена по формуле: ![]() где - средняя квадратическая радиальная погрешность при DOP = 1,0
. За счет оптимального выбора для пеленгования четырех спутников из находящихся в поле зрения антенны, как правило, шести-восьми спутников, точность определения позиции ВС повышается в четыре-шесть раз. Таким образом, высокая точность определения позиции приемника СНС обеспечивается на основе следующих основных принципов:
где - средняя квадратическая радиальная погрешность при DOP = 1,0
. За счет оптимального выбора для пеленгования четырех спутников из находящихся в поле зрения антенны, как правило, шести-восьми спутников, точность определения позиции ВС повышается в четыре-шесть раз. Таким образом, высокая точность определения позиции приемника СНС обеспечивается на основе следующих основных принципов:
Ответчик должен знать требования к точности опроса и сопоставлять его с точностью своего приемника в сочетании с точностью получаемой информации о коррекции, основанной на качестве и местоположении коррекции. и точность по вертикали, основанная на расстоянии. Дальнейшее исследование проводится из информации о корректировке, тем менее точным является опрос.
Когда точность описана относительно исходной точки, следует учитывать качество или ошибку в контрольном контроле и используемых моделях. Ортометрические высоты просто вычисляются как высота эллипсоида за вычетом высоты геоида. Поэтому важно включать вертикальные референтные метки высокого уровня с выравниванием по вертикали при привязке вашего опроса к данным данным, или область обзора очень велика.
- использования в качестве первично определяемого навигационного параметра дальности до спутника; определения времени прохождения сигнала от спутника с помощью специального генерируемого на спутниках и в аппаратуре потребителя псевдокода; обеспечения точной синхронизации часов на спутниках и в аппаратуре потребителя; вычисления в аппаратуре потребителя с помощью Альманаха и эфемеридных поправок координат спутника; оптимального выбора спутников для пеленгования с учетом их взаимного расположения.
- C/A-code (Clear/Acquisition-code – код свободного использования); P-code (Protected-code – защищенный код).
Этот подход включает в себя использование по меньшей мере, один стационарный опорный приемника и по меньшей мере один подвижный приемник называется ровером. Радиоприемник на опорный приемник передает позицию опорного положения к передвижным приемников. Это позволяет проводить съемку в режиме реального времени в полевых условиях и позволяет геодезисту проверять качество измерений без обработки данных.
Статические и быстрые статические процедуры. Статические исследования позволяют разрешать систематические ошибки, когда требуются высокоточные положения, путем сбора одновременных данных между стационарными приемниками в течение длительного периода времени, обычно от 30 минут до 4 часов, в зависимости от длины базовой линии. Быстрая статика - это процедура, которая использует очень короткие периоды заполнения. В отличие от статических методов, которые иногда требуют множественного сеанса занятости для создания избыточности в сети, быстро-статические станции должны быть заняты только один раз.
Рис. 2.6. Геоцентрические координаты спутника
Закон движения i-го навигационного спутника задается: прямоугольными координатами и скоростью их изменения , относящимися к некоторому определенному моменту времени . Если известны силы, действующие на спутник, то могут быть составлены уравнения движения спутника. И, следовательно, для любого момента времени t координаты i-го спутника и скорости их изменения могут быть определены в результате интегрирования уравнений движения спутника при некоторых начальных условиях. В результате определения дальности до i -го спутника может быть составлено следующее уравнение (рис. 4.7):
Состояние и эволюция существующих и будущих глобальных навигационных спутниковых систем
Постпроцессные кинематические процедуры. В настоящее время в Соединенных Штатах Глобальная система позиционирования является единственной полностью функциональной спутниковой системой в мире. Приблизительно 24 правительственных оперативных спутника доступны вместе с другими спутниками, которые могут использоваться в качестве заменителей тех, которые оказались неоперабельными.
Вместо этого мы работаем под руководством Национального управления связи и информации. Мы используем это лицензирование как один из методов определения того, разрешаем ли мы использование части оборудования федеральными пользователями или нет. У отдела также есть ограничения.
Где: – координаты приемника СНС относительно центра масс Земли; – координаты i -го спутника относительно центра масс Земли.
Рис. 4.7. Геоцентрические координаты спутника и ВС
Предполагая, что погрешность в измерении времени прохождения сигнала от спутника до приемника СНС
t = 0
, по результатам приема сигналов от трех спутников может быть составлена система из трех уравнений:  (2.1) и определены координаты x, y, z
потребителя СНС сигналов относительно центра масс Земли. Затем геоцентрические прямоугольные координаты переводятся в геодезические. Связь координат x, y, z
с широтой B
, долготой L
и высотой Н
может быть задана следующей системой уравнений:
(2.1) и определены координаты x, y, z
потребителя СНС сигналов относительно центра масс Земли. Затем геоцентрические прямоугольные координаты переводятся в геодезические. Связь координат x, y, z
с широтой B
, долготой L
и высотой Н
может быть задана следующей системой уравнений:
Используя тот, который уже существует, сокращает время ожидания. Поставщик оборудования должен знать процесс программирования оборудования для использования на федеральных частотах. Этот поставщик может запросить документацию, разрешающую использование частоты.
Технико-экономический раздел дипломной работы
Авторизованные частоты зависят от характеристик оборудования и географического положения пользователя. С общими частотами, как правило, довольно легко. Пожалуйста, не стесняйтесь, дайте мне знать, если у вас есть вопросы. Навигационная информация обеспечивается стандартной системой координат и системой точного позиционирования. Триангуляция используется в кадастровых съемках и методах съемки, используемых в гражданском строительстве, для определения местоположения точки путем измерения углов и расстояний до нее из двух известных точек.
 (2.2)
(2.2)
Где: x , y , z – прямоугольные координаты; В, L , Н – геодезические координаты (соответственно широта и долгота, рад, и высота, м); N – радиус кривизны первого вертикала, м; е – эксцентриситет эллипсоида. Значения радиуса кривизны первого вертикала и квадрата эксцентриситета эллипсоида вычисляют соответственно по формулам:
Ошибка диапазона, вызванная структурными факторами
![]()
Это ошибка в диапазоне, измеренном между спутниками и приемником. Это ошибка, вызванная ошибкой в атомных часах спутника. Однако существуют различия между предсказанной орбитой и фактической орбитой, что приводит к ошибкам диапазона. Задержки радиоволн в атмосфере.
В частности, задержка в ионосфере длиннее, когда активность электронов велика и короче около полуночи, когда активность электронов низка. Таким образом, время задержки значительно меняется в зависимости от дня и сезона. Ошибки диапазона также могут быть вызваны электромагнитными помехами в приемнике или многоканальными радиоволнами. Вместе с геометрическими факторами, связанными со спутниковыми устройствами, такие ошибки диапазона приводят к ошибкам позиционирования.
 (2.3)
(2.3)
 (2.4)
(2.4)
Где: а
– большая полуось эллипсоида, м; a – сжатие эллипсоида. Уравнения (2.1) и (2.2) только в общих чертах характеризуют алгоритмы, решаемые в вычислителях бортовой аппаратуры СНС. Кроме того для определения координат СНС приемника должна быть вычислена погрешность в измерении времени
t
прохождения сигнала от спутников до приемника СНС. При определении места ВС с использованием GPS задача решается во всемирной геодезической системе координат 1984 г. (WGS-84 – World Geodetic System – 1984), а при использовании ГЛОНАСС – в системе геодезических координат Параметры Земли 1990 г., версия 2000 г. На рис. 2.1 представлена графическая интерпретация, отличия координат WGS-84 от ПЗ-90.02 (в горизонтальном плане) из которой видно, что при определении местоположения в системе координат WGS-84 они будут отличаться от координат в системе координат ПЗ-90.02 максимум на 0.5 м в районе Калининграда и в этой связи их можно практически считать идентичными. При осуществлении точного захода на посадку (с вертикальным наведением) с использованием СНС необходимо учитывать волну геоида для посадочного порога ВПП в связи с тем, что высота ВС определяется в системе координат WGS-84 или ПЗ-90.02, а посадку ВС производит на ВПП, абсолютная высота которой отсчитывается от среднего моря, т.е. от геоида. Авиационные спутниковые навигационные системы обеспечивают не только определение координат места ВС, но и определение путевого угла и путевой скорости ВС. Для определения путевого угла и путевой скорости измеряется сдвиг частот в сигналах от каждого спутника. 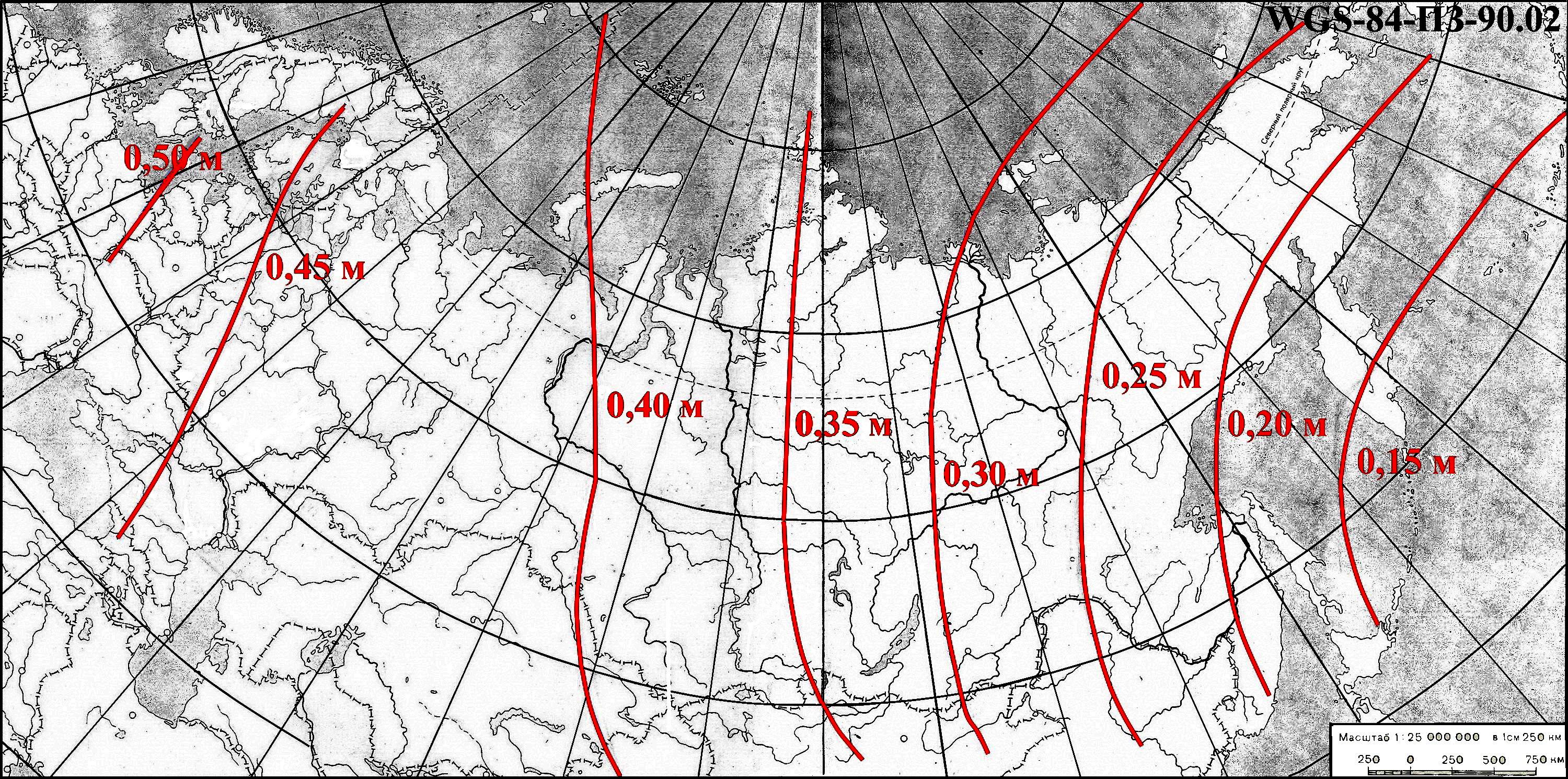
Рис. 2.1. Графическая интерпретация отличия координат ПЗ-90.02 от WGS-84
Полный алгоритм определения координат, путевой скорости и путевого угла воздушного судна (потребителя СНС сигналов) обеспечивает: В тех случаях, когда аппаратурой потребителя "захвачены" только три спутника и, следовательно, высота приемника СНС относительно среднего уровня моря вводится вручную или автоматически (в навигационных комплексах), то радиальная ошибка в позиции ВС может в два раза превышать ошибку в высоте. Так, например, если абсолютная высота введена с ошибкой = 100 м, то радиальная погрешность в позиции ВС может достигнуть величины σ r = 200 м. Фактические путевой угол и путевая скорость могут быть определены с высокой точностью только в тех случаях, когда скорость приемника СНС (скорость ВС) превышает 30 узлов (55,6 км/ч). При этом средняя квадратическая погрешность в определении фактической путевой скорости, примерно, = 0,1 узла (0,2 км/ч). 2.3. Основные преимущества СНС Одним из основных направлений использования искусственных спутников Земли в авиации является их применение для навигации воздушных судов (ВС). СНС обладают рядом преимуществ перед традиционными радиотехническими системами (РТС) навигации:
- большая высота полета ИСЗ позволяет создать глобальную зону действия радиотехнических средств, установленных на спутниках, при использовании достаточно простых антенных устройств, как на спутнике, так и на ВС; с помощью созвездия ИСЗ обеспечивается создание навигационной системы, охватывающей территорию земного шара; нахождение спутника в пределах прямой видимости в любой точке зоны действия его радиотехнических средств позволяет использовать наиболее помехоустойчивые диапазоны радиоволн и передавать сигналы с наименьшими искажениями; обеспечивается практически неограниченная пропускная способность СНС; обеспечивается относительная простота и дешевизна бортового оборудования СНС на ВС, обусловленная отсутствием передатчика и современными технологиями обработки сигналов; возможно при дальнейшем развитии СНС комплексное использование спутниковых систем для решения задач навигации, связи и наблюдения.
- повышение уровня безопасности полетов; повышение точности навигации, особенно в районах со слаборазвитой структурой наземного оборудования навигационных РТС и над водными пространствами; уменьшение интервалов эшелонирования ВС и увеличение пропускной способности воздушного пространства; спрямление воздушных трасс.
- подсистемы космических аппаратов (ПКА); подсистемы контроля и управления (ПКУ); навигационной аппаратуры потребителей (НАП).
Таблица 3.1
Основные характеристики GPS и ГЛОНАСС
| Параметры | ГЛОНАСС |
|
| Спутники | ||
| Количество спутников | ||
| Количество орбит | ||
| Высота орбит, км | ||
| Период обращения, ч. мин | ||
| Наклон орбиты, град | ||
| Несущая частота (L1) МГц | ||
| Источник питания | Солнечная батарея и аккумулятор |
|
| Наземные станции | ||
| Главная станция управления | ||
| Контрольные станции | ||
| Загрузочные станции | ||
| Лазерные станции слежения | ||
| Наземные антенны | ||
| Точность определения | ||
| а) местоположения в плане, м: | 50 - 70 (P = 99,7%) |
|
| - грубый код с S/A | ||
| - грубый код без S/A | ||
| - точный код | ||
| б) по вертикали, м: | ||
| - грубый код с S/A | ||
| - грубый код без S/A | ||
| - точный код | ||
| в) скорости, м/с | 0,15 (P = 99,7%) |
|
| г) времени, мкс | ||
| Зона действия | Глобальная |
|
| Число одновременных пользователей | Не ограничено |
|
| Используемая система координат | ||
- эфемериды спутников; коэффициенты моделирования ионосферы; информация о состоянии спутника; системное время и уход часов спутника; информация о дрейфе спутника.
- геодезические; навигационные; бытовые (рис. 4.1).

Рис. 4.1. Классы приемоиндикаторов СНС
Приемник спутникового навигационного сигнала (ГЛОНАСС/GPS-приемник) – это микросхема или совокупность микросхем (иногда по контексту с антенной или без таковой) с соответствующим программным обеспечением, задача которых прини-мать и декодировать сигналы спутниковой навигационной системы и выдавать на выходе координаты объекта в определенном формате. В том случае, когда приемник выдает информацию в навигационный комплекс, то он является датчиком СНС. Навигационные приемоиндикаторы, сертифицированное США по техническому стандарту ТSO-С129, делится на три класса: А, В, С. Знание классов оборудования необходимо для практических целей, т.к. на картах (схемах) могут быть указаны ограничения по использованию конкретного класса оборудования Класс А – оборудование, сочетающее в себе навигационный датчик, опреде-ляющий трехмерные координаты ВС: широту (B), долготу (L), высоту (H), время (UTC) и вектор путевой скорости (W), а также навигационный вычислитель, решаю-щий навигационные задачи и имеющий ряд сервисных и справочных функций. Это самый распространенный класс оборудования СНС, которое устанавливается на ВС, не имеющих навигационных комплексов последнего поколения (КС ПНО, FMS). Для гарантирования целостности в приемник встраивается устройство, обла-дающее функцией автономного контроля целостности в приемнике (RAIM) (см. далее). Оборудование класса А имеет подклассы: А1 и А2. Оборудование подкласса А1 одобрено для маршрутного полета, полета в зоне аэропорта и для неточного захода на посадку. Оборудование подкласса А2 одобрено для маршрутного полета и по-лета в зоне аэродрома. Поскольку оборудование СНС класса А является также и оборудованием зо-нальной навигации, то к нему применяются такие же требования, как и к аппаратуре зо-нальной навигации. Класс В – оборудование, состоящее из навигационного датчика и устройства передачи данных: φ, λ, h, UTC, W в навигационные комплексы. Оборудование класса В можно рассматривать как один из датчиков много-функциональных навигационных систем, в которых происходит или коррекция коор-динат по данным от СНС, или счисление координат по получаемой от СНС инфор-мации, и в которых происходит решение всех навигационных и сервисных задач на более высоком уровне, определяемом возможностями этих систем, как правило, большими, чем у оборудования класса А. Оборудование класса В имеет подклассы: В1, В2, В3, В4. В оборудовании под-классов В1 и В2 предусмотрен RAIM. Оборудование подкласса В1 позволяет выпол-нять маршрутный полет, полет в зоне аэродрома и неточный заход на посадку, а В2 – полет по маршруту и в зоне аэродрома. В оборудовании подклассов В3 и В4 дат-чики объединены, чтобы на уровне ВС обеспечить контроль целостности, эквива-лентный тому, который обеспечивает RAIM. Оборудование подкласса В3 позволяет выполнять маршрутный полет, полет в зоне аэродрома и неточный заход на по-садку, а В4 – полет по маршруту и в зоне аэродрома. Класс С – оборудование класса С, как и класса В, является датчиком для навигационных комплексов, обеспечивающих автоматический и директорный режим выполнения полета. Взаимодействие с бортовым комплексом всегда двусто-роннее с целью поддержки всех алгоритмов работы оборудования СНС в процессе обработки информации от спутников. Таким образом, оборудование класса С “встроено” в комплексные системы пилотажно-навигационного оборудования и является его составной частью. В силу этого и ряда других факторов оборудование класса С счи-тается более надежным, чем классов А и В. Это оборудование, как правило, не имеет своих органов управления и индикации, а обращение к СНС, управление обо-рудованием СНС класса С производится через многофункциональные пульты. Оборудование СНС класса С взаимодействует не только с навигационным оборудованием ВС. Как датчик параметров полета (φ, λ, h, UTC, W), оно использу-ется в системах TCAS, ADS, дисплеях навигационной обстановки, ответчиках ре-жима S и других. Оборудование класса С делится на подклассы: С1, С2, С3, С4. Подклассы С1÷С4 соответствуют подклассам В1÷В4. В табл. 4.1 перечислены требования TSO C129 к рассмотренным выше классам оборудования. Бортовое оборудование СНС класса А, В и С имеет функцию наблюдения за достоверностью информации, получаемой от спутников – RAIM (Reciever Autonomous Integrity Monitoring) – автономный контроль целостности в приемнике. RAIM – функция процессора бортового приемника СНС, обеспечивающая автономный контроль целостности сигналов навигационных спутников. Ее назначение: – своевременно обнаружить неустойчиво работающий спутник и исключить его из обработки для навигационных определений; – рассчитать текущую ошибку определения координат и, сравнивая расчетное значение с максимально допустимой на данном этапе полета, предупредить летный экипаж о выходе расчетной ошибки за предельные значения; – определить геометрию спутников в заданной точке, в заданное время и пре-дупреждать экипаж о том, что требуемая точность и надежность навигации по СНС в этой точке не будут обеспечены, выдавать сообщение об отказе СНС в целом и не-возможности ее использования для навигации. Для решения этих задач бортовое оборудование СНС должно иметь функцию RAIM или ее эквивалент AAIM (Aircraft Autonomous Integrity Monitoring) – бортовая автономная система контроля целостности.
Таблица 4.1
Классификация GPS-датчик
| обору-дования | Нали-чие RAIM | Инерциальная система, обес-печивающая функцию RAIM | Район полета: |
|||||
| континен- | аэро-узел | неточный на посадку |
||||||
| Класс А – GPS-датчик и навигационный вычислитель | ||||||||
| Класс В – GPS-датчик с возможностями интегрирования в навигационной системе (т.е. КС ПНО (FMS), многофункциональная навигационная система) | ||||||||
| Класс С – GPS-датчик с возможностями интегрирования в навигационной системе (как в классе В), которая обеспечивает расширенные возможности автоматического и директорного режима полета и уменьшение навигационных ошибок | ||||||||
- Дифференциального метода корректировки спутникового сигнала
- спутниковая система функционального дополнения (SВАS – Satellite-Based Augmentation System); наземная система функционального дополнения (GВАS – Ground-Based Augmentation System.
Рис. 5.1. Дифференциальный метод повышения точности определения места ВС
Дифференциальный режим используется как в наземных, так и в спутниковых функциональных дополнениях. Использование дифференциальных поправок позволяет существенно повысить точность определения места ВС и таким образом использовать СНС для выполнения точного захода на посадку. В практической деятельности используются локальные и глобальные дифференциальные GNSS. Локальная дифференциальная GNSS – разновидность дифференциальной GNSS, в которой дифференциальные поправки можно использовать для обеспечения соответствующих этапов полета в пределах ограниченного географического района. Глобальная дифференциальная GNSS – разновидность дифференциальной GNSS, в которой дифференциальные поправки можно использовать для обеспечения соответствующих этапов полета в пределах целого региона. 5.2. Системы функционального дополнения Функциональное дополнение GNSS. Метод обеспечения данной системы входной информацией, которая дополняет получаемую путем использования основного(ых) созвездия(й) спутников и позволяет получать дополнительные входные данные о дальностях/псевдодальностях, или ввести поправки в существующие входные данные о псевдодальностях, либо улучшает указанные данные. Это обеспечивает улучшение характеристик системы по сравнению с теми, которые могут быть достигнуты при использовании только основной спутниковой информации. Системы функционального дополнения включают как спутниковые системы функционального дополнения – широкозонные дифференциальные подсистемы (SBAS), так и наземные системы функционального дополнения (GBAS). Принципиальное отличие SВАS и GВАS состоит в способах получения и доставки кор-ректирующей информации, а также зоне действия систем. SBAS – система функционального дополнения с широкой зоной действия, в которой пользователь принимает дополнительную информацию от передатчика, установленного на спутнике, и является глобальной системой с зоной действия до не-скольких тысяч километров. GBAS – система функционального дополнения, вкоторой пользователь принимает дополнительную информацию непосредственно от наземного передатчика. GВАS является локальной системой, функ-ционирующей в зоне действия до 50 км. Примером такой системы в России является локальная контрольно-корректирующая станция ЛККСА-А-2000. Наряду с локальной зоной действия, GBAS могут быть с расширенной зоной действия. Примером такой GBAS является Австралийская наземная региональная система дополнения (GRAS – Ground-based Regional Augmentation), которая охватывает территории Австралии и Новой Зеландии. Спутниковые функциональные дополнения (S BAS) . Система содержит наземные контрольные станции, распределенные на достаточно обширной территории, одной из основных задач ко-торых является выработка корректирующей информации из сигналов спутников и ин-формации о целостности. Корректирующая информация со всех контрольных станций, ин-формация о целостности навигационных спутников обрабатывается по определенным алго-ритмам и в виде сообщения, содержащего широкозонные дифференциальные поправки к сигналам навигационных спутников, информацию о целостности и другую служебную ин-формацию по каналам связи "земля-спутник связи – воздушные суда" передается в бортовые приемники СНС посредством геостационарных спутников. Геостационарный спутник при этом выполняет роль и навигационного, увеличивая количество радиовидимых потребителю навигационных спутников. Примером исполнения SВАS является WААS (Wide Area Augmentation System – Система функционального дополнения с широкой зоной действия) обслуживающая территорию США включая штат Аляска. Система WAAS создана для достижения возможности использования GPS во всех стадиях полета ВС, включая точный заход на посадку. Система обеспечивает ошибку не более 3 м по горизонтали и 4 м по вертикали в 95% времени. Система состоит из космического и наземного сегментов. Поправки для спутников системы WAAS формируются с помощью развитой сети базовых станций (наземный сегмент WAAS). Спутники, покрывающие своими сигналами территорию США, составляют космический сегмент системы. Сигнал WAAS имеет ту же частоту и схожую структуру с GPS, что облегчает его реализацию в GPS приемниках. В Европе и Азии на основе WAAS созданы и функционируют аналогичные системы. В Европе EGNOS (European Geostationary Navigation Overlay Service – Европейская широкозонная подсистема спутниковой навигации, в районе Индийского полуострова – GAGAN (GPS Aided Geo Augmented Navigation – GPS дополненная геостационарным спутником для расширения навигации), на Дальнем востоке – MSAS (Multi-Functional Satellite Based Augmentation System – Многофункциональная система дополнения спутникового базирования), принадлежащая Японии, рис. 5.2. Наземные функциональные дополнения (GBAS) включает наземную подсистему и бортовую подсистему. Наземная подсистема GBAS передает данные и поправки к дальномерным сигналам GNSS посредством ОВЧ-радиовещательной передачи цифровых данных в бортовую подсистему. Наземная подсистема GRAS состоит из одной или нескольких наземных подсистем GBAS. GBAS выполняет следующие функции:
- обеспечение локальных поправок к псевдодальности; обеспечение данных о системе GBAS; обеспечение данных для конечного участка точного захода на посадку; обеспечение прогнозирования данных об эксплуатационной готовности дальномерного источника; обеспечение контроля целостности источников дальномерных измерений СНС.
Рис. 5.2. Области обслуживания системами функционального дополнения
с широкой зоной действия
В том случае, когда GBAS предна-значена для обслуживания только в районе аэродрома, то такая система имеет ло-кальную зону действия и именуется как система функционального дополнения с ограниченной зоной действия (LAAS – Local Area Augmentation System). На рис. 5.3 представлена схема захода на посадку с применением GABAS (GLS). Зона действия LAAS для обеспечения точных заходов на посадку по категории I или заходов на посадку с вертикальным наведением, является следующей:
- в боковом направлении: начиная с 140 м с каждой стороны от посадочного порога ВПП и расширяющейся под углом 35° с каждой стороны траектории конечного этапа захода на посадку до 28 км и под углом 10° с каждой стороны траектории до 37 км;
- в вертикальной плоскости: в пределах упомянутой боковой зоны выше 7° или 1,75 относительно угла оси глиссады над горизонтом (θ) с началом координат в точке захвата глиссады и 0,45θ выше горизонта или менее вплоть до 0,30θ, такого, который требуется, чтобы поддержать назначенную процедуру захвата глиссады. Эта зона действия используется между 30 м и 3000 м относительной высоты точки приземления.
Рис. 5.4. Рабочая область LAAS
6. Бортовое оборудование СНС 6.1. Типы оборудования Существует большое количество модификаций бортового оборудования СНС. На ВС Ил-96, Ту-204/214 и Boeing, Airbus выпуска после 1997 г. оборудование СНС входит в состав навигационного комплекса, а информация отображается на навигационном дисплеи и пульте управления информации (ПУИ). В качестве примера на рис. 6.1 представлена упрощенная схема интеграции датчика GPS в структуре навигационного комплекса типа FMS.
Рис. 6.1. Упрощенная схема интеграции датчика GPS
в структуре навигационного комплекса типа FMS
На воздушном судне, не оборудованном комплексной системой пилотажно-навигационного оборудования (КС ПНО, FMS) или оборудованными навигационными комплексами старого поколения, устанавливается стационарно приемоиндикатор GPS. Существует большое количество моделей разных производителей приемоиндикаторов GPS. На отечественных ВС в соответствии с рекомендациями полномочного органа в области гражданской авиации 1995 г. эксплуатируются приемоиндикаторы GPS указанные в табл. 6.1. Таблица 6.1
Приемоиндикаторы GPS используемые на отечественных ВС
| Тип приемника | Класс по TSO C-129 |
|
| Trimble Navigation | ||
| TNL 2000 Approach | ||
| TNL 2000 Approach Plus | ||
| TNL 2101 input/output |
Таблица 6.2
Отечественное оборудование СНС
| Название | Обозначение | |
| Спутниковый навигационный приемник | СНС 2 | |
| Авиационная бортовая радиотехническая интегрированная система | АБРИС | |
| Интегрированная инерциально- спутниковая навигационная система | НСИ-2000 НСИ-2000 МТ | |
| Аппаратура потребителей спутниковых навигационных систем ГЛОНАСС/GPS | СН-3301 СН-4312 | |
| Бортовой приемник спутниковой навигации | БПСН-2 | |
| Бортовая многофункциональная система | БМС - индикатор | |
| Пульт-приемоиндикатор спутниковых навигационныхсистем ГЛОНАСС/GPS | ППИ-2006 | |
| Transas Satellite System | TSS |
6.2. Лицевая панель TNL-2000 Approach Plus
Рис. 6.3. Две навигационные страницы, индицируемые на пульте управления FMS.
Из рис. 6.2 и 6.3 видно, что на для понимания информации необходимо знать аббревиатуру, индицируемую на экранах (см. табл. 6.3).
Таблица 6.3
Аббревиатура, используемая в оборудовании СНС и сообщениях на дисплеях
| AUX | - Auxiliary | - дополнительный; |
| BRG | - Bearing | - пеленг; |
| DA | - Drift Angle | - угол сноса; |
| DR | - Dead Reckoning | - счисление пути (по запомненному ветру при отказе приема сигналов спутников); |
| CALC | - Calculation | - вычисление; |
| DTK | - Desired Track | - заданный путевой угол; |
| DIS | - Distance | - расстояние; |
| ENT | - Entry | - ввод (информации) |
| ETA | - Estimated Time of Arrival | - расчетное время прибытия в заданный пункт; |
| ETE | - Estimated Time Enroute | - расчетное время полета до заданного пункта; |
| GS | - Ground Speed | - путевая скорость; |
| FPL | - Flight Plan | - план полета; |
| FR | - From | - от (пункта); |
| HX | - Next | - следующий (пункт); |
| HDG | - Heading | - курс; |
| HLD | - Holding | - ожидание; |
| MSG | - Message | - сообщение; |
| KT | - Knot | - узел (скорость); |
| NAV | - Navigation | - навигация; |
| L (R) | - Left (Right) | - влево, вправо (уклонение, угол сноса); |
| NRST | - Nearest | - ближайший (пункт); |
| OBS | - Omnidirectional Bearing Selected | - заданное (выбранное) направление (пеленг) выхода на навигационный пункт; |
| PTK | - Parallel Track | - параллельная линия пути; |
| SV |
| - количество спутников (принимаемых); |
| TAS | - True Airspeed | - истинная воздушная скорость; |
| TK, TRK | - Track | - фактический путевой угол; |
| TRN | - Turn | - угол доворота (разность между BRG и TRK); |
| TAE | - Track Angle Error | - "ошибка" в путевом угле (TK-DTK); |
| TO | - To | - на (точку); |
| WPT | - Way Point | - точка пути; |
| XTK | - Cross-Track Error, the Distance of Track | - линейное боковое уклонение от линии заданного пути |
 а рис. 6.4 представлена графическая интерпритация аббревиатур навигационных параметров при полете на участке маршрута.
а рис. 6.4 представлена графическая интерпритация аббревиатур навигационных параметров при полете на участке маршрута. Рис. 6.4. Полет на заданный пункт
6.3. Основные режимы работы приемоиндикаторов СНС Основные режимы использования приемоиндикаторов СНС следующие:
- включение и инициализация (определение места ВС); создание маршрута полета (FPL); навигация (NAV) – полет по маршруту – EN-ROUTE; выполнение SID, STAR, HOLDING – TERMINAL; заход на посадку – NON-PRECISION APPROACH, только оборудование подклассов: А1, В1, В3, С1, С3; PRECISION APPROACH при наличии GABS (LAAS).
Terminal/Approach Check
Generated 20/08/2009 15:27:30 UTC
Scenario Start: 20/08/2009 00:00:00 UTC Scenario Stop: 23/08/2009 00:00:00 UTC
Mask Angle: 5.00. Algorithm Fault Detection with Exclusion (FDE). Mode: Approach
Almanac – Week 521 В соответствии с прогнозом RAIM не обеспечивается в аэропорту: Курумоч 21 августа 2009 г. в районе 3 часов UTC с барометрической и без барометрической поддержки; Рощино 22 августа 2009 г. в районе 9 часов UTC с барометрической и без барометрической поддержки; Кольцево 22 августа 2009 г. в районе 15 часов UTC без барометрической поддержки. Во время полета пред планированием захода на посадку с использованием GPS необходимо выполнить операцию по уточнению RAIM прогноз. 6.5. Использование функции RAIM Необходимо заострить внимание, что для полетов о ППП используются датчики СНС стационарные и переносные, которые имеют функцию RAIM. Основные задачи функции RAIM: – оценка качества принимаемых сигналов со спутником и выявление спутника, чья информация не должна быть использована (см. рис. 6.5); – определение порогов срабатывания по точности определения места ВС в зависимости в зависимости от типа операций, см. табл. 6.4.
Рис. 6.5. Оценка качества принимаемых сигналов
На рис. 6.5 графически представлены линии положения от соответствующих номеров спутников. Место ВС определяется пересечением линий положений. В каждой точке пересечения линий положения определяются геодезические координаты (φ, λ) по умолчанию на эллипсоиде WGS-84, если не выбран соответствующий рефференц-эллипсоид. Из рис. 6.5 видно, что координаты, определяемые с использованием линия положения спутника №6, существенно отличается от остальных. В этой связи алгоритм RAIM не будет обрабатывать информацию этого спутника. Информация от пяти спутников образует 10 пересечений (рис. 6.6), т.е. 10 мест ВС. В дальнейшем компьютере по 10 местам вычисляется значение места ВС: 
, где n
количество i
мест. 
Рис. 6.6. Определение места ВС
В дальнейшем определяется радиус разброса места ВС (R). Значение этого радиуса используется в качестве порога срабатывания RAIM в зависимости от выполняемой операции согласно табл. 6.4. Таблица 6.4
Пороги срабатывания RAIM
| Этап полета | Значение допуска |
|
| По маршруту | ||
| В районе аэродрома | ||
| Заход на посадку | ||
- основная база навигационных данных; база пунктов пользователя; база маршрутов пользователя (Company route).
- аэропортах; радиомаяках VOR; радиомаяках NDB; пунктах, не маркированных радиомаяками – INTERSECTION.
- идентификатор; наименование; ближайший крупный город и государство; широта и долгота; абсолютная высота; частоты каналов связи.
- принадлежность (гражданский или военный); информация о ВПП (грузонапряженность, превышение, размеры); система посадки (светотехнические и радиотехнические средства); наличие посадочного радиолокатора; зона с особым режимом полетов (если аэропорт находится в пределах такой зоны); разница во времени с UTC; информация об аэродромном обслуживании (наличие марок топлива и др. сервис).
- идентификатор; наименование; государство местонахождения VOR; частота; наличие радиомаяка DME; широта и долгота.
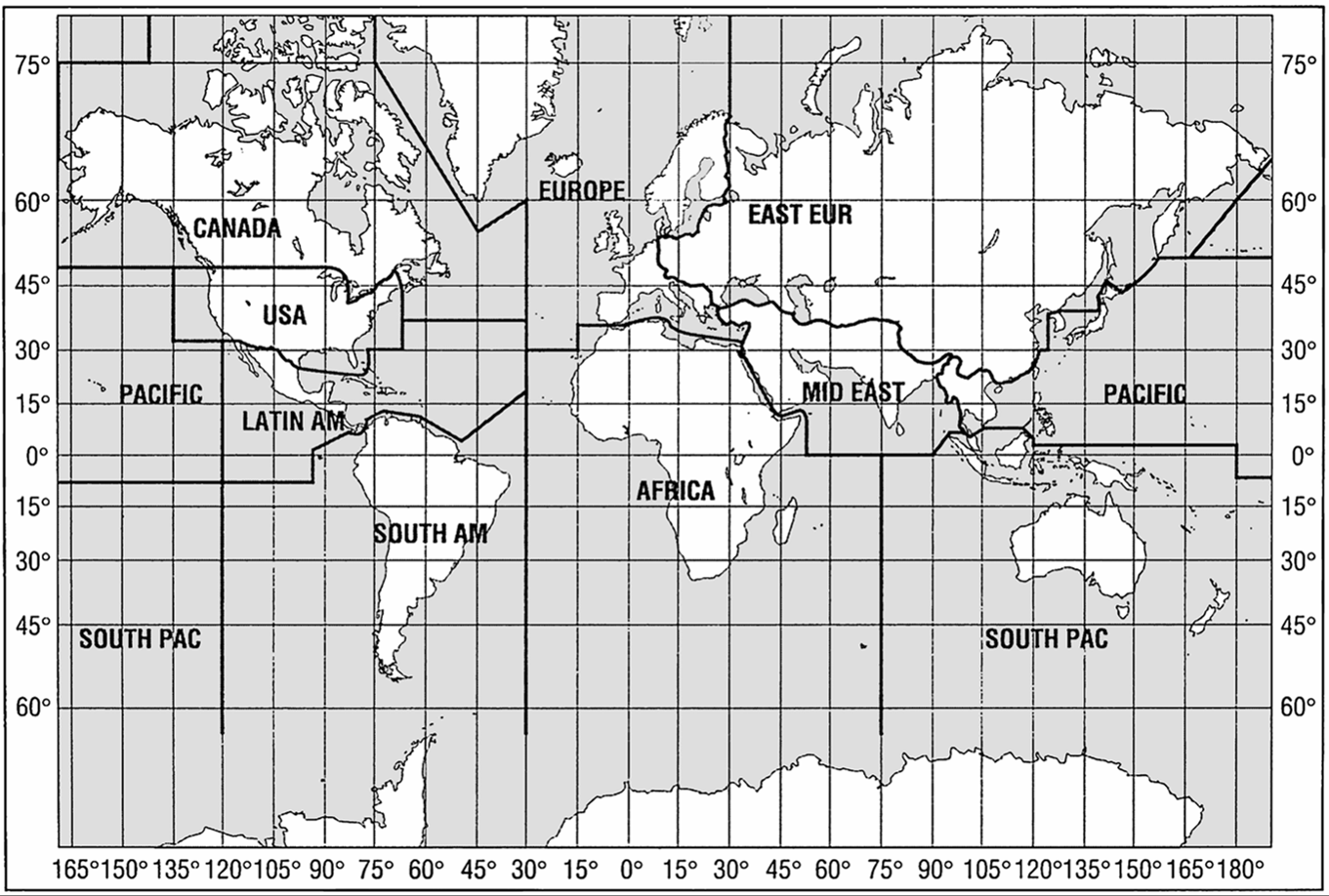
Рис. 7.1. Деление Земного шара на регионы баз данных
- идентификатор; широта и долгота.
- наименование; аэропорт; пункт перехода; соответствующая ВПП; контрольные точки процедуры.
- о минимальных безопасных высотах; о зонах, контролируемых органами ОВД (УВД) и классах воздушного пространства (A, B, C, D, E, F, G); о зонах с особым режимом полетов (P, R, D и т. д.); частоты средств связи с органами ОВД.
- Приложение 15 к Конвенции о международной гражданской авиации. Службы аэронавигационной информации. ИКАО, изд. 12. Монреаль, 2004. Спутниковые навигационные системы. Методическое пособие. СПб, АГА, НЛМК, 1998.