Rapport sur les systèmes mondiaux de navigation par satellite
Le système mondial de navigation par satellite (GLONASS, anglais GLONASS) est un système de navigation par satellite russe conçu pour déterminer la position, la vitesse et l'heure exacte d'un nombre illimité d'utilisateurs terrestres, maritimes, aériens et spatiaux.
Le lancement avec succès, en octobre 1957, du premier satellite artificiel Terre artificiel a été lancé avec succès en URSS par le début des travaux pratiques dans le domaine de la navigation par satellite. À la fin des années 1960, le système de radionavigation par satellite à orbite basse "Cicada" a été créé en Union soviétique.
L’exploitation réussie de systèmes de navigation par satellite sur orbite basse par des consommateurs maritimes a largement attiré l’attention sur la navigation par satellite. Il était nécessaire de créer un système de navigation universel qui réponde aux exigences d'un nombre considérable de consommateurs potentiels.
En 1976, le gouvernement de l'URSS a publié un décret sur son développement.
Sur la base d'études multilatérales conduites, des spécialistes nationaux ont sélectionné une constellation orbitale à temps plein de 24 satellites situés sur des orbites quasi circulaires à moyenne altitude, d'une hauteur nominale de 19 100 km.
Les essais en vol d’un système de navigation domestique en orbite haute, baptisé GLONASS, ont été lancés le 12 octobre 1982 avec le lancement du premier engin spatial Glonass (Cosmos-1413). Le 24 septembre 1993, le système a été officiellement mis en service dans l'intérêt du ministère de la Défense de la Fédération de Russie avec une constellation orbitale composée d'un nombre limité de 12 satellites. En décembre 1995, le groupe orbital a été déployé dans un effectif régulier (24 satellites), ce qui est nécessaire pour assurer une couverture complète du globe.
La réduction du financement de l'industrie spatiale dans les années 90 a entraîné la dégradation du groupe orbital GLONASS. En 2002, il ne comptait plus que sept engins spatiaux, qui ne pouvaient pas fournir au territoire russe les signaux de navigation du système GLONASS, du moins avec une disponibilité modérée. La précision était inférieure au système de navigation GPS américain de plus d'un ordre de grandeur.
Afin de préserver et de développer le système, le Président et le gouvernement de la Fédération de Russie ont approuvé un certain nombre de documents de politique générale, dont le principal était le programme cible fédéral Système de navigation globale pour la période 2002-2012.
À la suite de sa mise en œuvre, le groupe orbital a été entièrement restauré. Depuis 2012, le système a été mis au point dans le cadre du nouveau programme cible fédéral "Maintenance, développement et utilisation du système GLONASS pour la période 2012-2020", afin de garantir l'efficacité de la résolution des tâches d'assistance en matière de temps coordonné et de navigation dans l'intérêt de la défense, de la sécurité et du développement du secteur socio-économique du pays. et perspective lointaine.
Le système GLONASS comprend un sous-système de vaisseau spatial, un sous-système d’équipements de surveillance et de contrôle et de navigation des consommateurs.
Le système GLONASS repose sur 24 satellites qui se déplacent dans trois plans orbitaux de huit véhicules dans chaque plan, inclinés par rapport à l'équateur à un angle de 64,8 °, avec une hauteur orbitale de 19 100 km et une période orbitale de 11 heures 15 minutes 44 secondes. La structure choisie du groupe orbital assure le déplacement de tous les engins spatiaux le long d'un seul itinéraire à la surface de la Terre, avec sa fréquence en huit jours. Ces caractéristiques offrent une grande stabilité du groupement orbital du système GLONASS, ce qui permet pratiquement de se passer de la correction des orbites des engins spatiaux pendant toute la durée de leur existence.
Au 10 octobre 2017, le groupe orbital de GLONASS comptait 25 engins spatiaux, dont 23 étaient utilisés aux fins pour lesquelles ils avaient été conçus.
Les satellites spatiaux pour GLONASS étaient (à présent - Information Satellite Systems JSC) d'après l'académicien MF Reshetnev) dans la ville de Krasnoyarsk-26 (Zheleznogorsk).
Le vaisseau spatial Glonass était en service avec une durée de vie active garantie de trois ans. Actuellement, la base de la constellation orbitale est constituée de satellites de la série modifiée Glonass-M, dont le premier a été lancé en décembre 2003. Ils diffèrent des satellites de la première génération avec une période de garantie d’existence active (sept ans) et l’utilisation de composants importés. Il est prévu de remplacer le satellite "Glonass-M" de la nouvelle génération "Glonass-K" avec une durée de vie pouvant atteindre 10 ans. Le premier vaisseau spatial de ce type a été mis sur orbite en 2011, le second en 2014.
Actuellement, le développement de satellites de navigation avancés, le Glonass-K de la deuxième étape, est également en cours à la JSC "ISS".
Le sous-système de surveillance et de contrôle (PCU) comprend le centre de contrôle du système GLONASS et un réseau de stations de mesure, de contrôle et de surveillance réparties dans toute la Russie. Les tâches de la PCU consistent notamment à surveiller le bon fonctionnement des engins spatiaux, à affiner en permanence les paramètres des orbites et à transmettre aux satellites des programmes horaires, des commandes de contrôle et des informations de navigation.
L'équipement de navigation grand public comprend des récepteurs de navigation et des dispositifs de traitement conçus pour recevoir les signaux de navigation des satellites GLONASS et calculer leurs propres coordonnées, leur vitesse et leur heure. L'équipement de navigation grand public GLONASS permet de mesurer sans demande jusqu'à quatre satellites GLONASS, ainsi que de recevoir et de traiter les messages de navigation. Le message de navigation décrit la position du satellite dans l'espace et dans le temps. Suite au traitement des mesures reçues et des messages de navigation reçus, les trois coordonnées du consommateur sont déterminées, les trois composantes du vecteur vitesse de son mouvement, ainsi que la "liaison" de l'échelle de temps du consommateur à l'échelle du standard de temps universel coordonné UTC (SU).
Le système GLONASS permet la navigation globale continue de tous les types de consommateurs avec différents niveaux d’exigences de qualité en utilisant des signaux standard (L1) et de haute précision (L2) avec une probabilité de 0,95 avec 18 satellites et 0,997 avec 24 satellites dans la constellation. Il est lié à la technologie spatiale à double usage.
Actuellement, la société d'État "Roscosmos" et les ministères et départements russes participent au développement du projet GLONASS: ministère de la Défense, ministère de l'Intérieur, Rostechnadzor, ministère des Transports, Service fédéral de l'enregistrement, ministère de l'Industrie et du Commerce, Norme russe, Agence fédérale des organisations scientifiques (FANO).
À l'été 2017, le directeur de l'Agence fédérale de réglementation technique et de métrologie (Rosstandart), Alexey Abramov, affirme que des scientifiques russes s'attachent à augmenter la précision des navigateurs GLONASS de quelques centimètres. Selon lui, jusqu'à ce que la plage de mesure soit atteinte (dans des conditions favorables, il est possible de déterminer l'emplacement d'un objet avec une précision de 3 à 5 mètres).
En septembre 2017, le vice-Premier ministre Dmitry Rogozin a déclaré que le système russe GLONASS était deux fois moins performant que le GPS américain. Lors de la réunion de la commission du complexe militaro-industriel, le président Vladimir Poutine a pour tâche de niveler l'efficacité du GPS et du GLONASS et, d'ici 2020, d'atteindre des indicateurs de compétitivité. Selon Rogozin, cela peut être fait grâce au lancement de nouveaux appareils.
Conformément au décret présidentiel de la Fédération de Russie, l'accès aux signaux de navigation civile du système GLONASS est fourni gratuitement et sans restrictions aux consommateurs russes et étrangers.
Depuis 1996, à la suggestion du gouvernement de la Fédération de Russie, GLONASS et le GPS américain sont utilisés par l’Organisation maritime internationale et l’Organisation de l’aviation civile internationale.
Les moyens modernes de navigation par satellite sont déjà largement utilisés dans divers domaines socio-économiques et permettent la navigation de véhicules terrestres, aériens, maritimes, fluviaux et spatiaux, la gestion du trafic sur tous les types de transport, la surveillance des marchandises précieuses et dangereuses, la surveillance de la pêche dans les eaux territoriales. , opérations de recherche et de sauvetage, surveillance de l’environnement; levé géodésique et détermination de la localisation d'objets géographiques avec une précision centimétrique lors de la pose d'oléoducs et de gazoducs, de lignes électriques, en construction; synchronisation dans les systèmes de communication, les télécommunications et l'industrie de l'énergie électrique; résoudre des problèmes géophysiques fondamentaux; navigation personnelle des consommateurs individuels.
La navigation par satellite est déjà utilisée dans l'agriculture, où elle est utilisée pour le traitement automatique des terres par les moissonneuses-batteuses, ainsi que dans l'industrie minière. La gamme d'applications de la technologie de navigation par satellite est en constante expansion.
Le matériel est basé sur des informations provenant de RIA News et de sources publiques.
Pendant les éruptions solaires.
Pendant les perturbations géomagnétiques.
Expliquez ce qu'est un GNSS.
Parlez de l'évolution de la navigation: "du compas aux systèmes de navigation par satellite (SNA)".
Expliquer les principes généraux de la navigation par satellite (SN).
Décrivez le SCN actuelGPS et GLONASS, leurs composants (segments spatial et terrestre) et leurs applications.
Indiquez quels SNS se préparent ou sont en cours de développement (GALLILEO, COMPAS).
Expliquez les échecs SNS:
Indiquez les facteurs qui influent sur la détérioration de la précision de positionnement.
GNSS.
Navigation par satellite: concept, système, action.
Système mondial de navigation par satellite (GLONASS) - Soviétique et russedéveloppé par demande. L'un des deux systèmes mondiaux de navigation par satellite actuellement en service. Le système devrait reposer sur 24 satellites se déplaçant au-dessus de la surface dans trois plans orbitaux avec une pente des plans orbitaux de 64,8 ° et une altitude de 19 100 km. Le principe de mesure est similaire au système de navigation américain.. Actuellement, le développement du projet GLONASS est engagé dans (Roscosmos) et OJSC "Russian"
Avec  combien d’humains il y a tant de questions sur la façon de déterminer son emplacement sur terre et sur mer, dans la forêt ou dans la ville. À ce jour, il n’est pas nécessaire de naviguer, comme les anciens voyageurs et navigateurs des étoiles ou de la boussole. L’époque de la découverte des ondes radio a considérablement simplifié la tâche de la navigation et ouvert de nouvelles perspectives à l’humanité dans de nombreux domaines de la vie et de l’activité. Avec la découverte de la possibilité de conquérir l’espace, une percée décisive a été franchie dans la détermination des coordonnées d’un objet sur Terre. Les satellites artificiels de la Terre sont devenus des stations de référence pour la radionavigation. Aujourd'hui, les systèmes de navigation par satellite sont devenus accessibles non seulement aux militaires ou aux marins, mais également aux simples citoyens, aux particuliers et aux entreprises pour qui la navigation est nécessaire.
combien d’humains il y a tant de questions sur la façon de déterminer son emplacement sur terre et sur mer, dans la forêt ou dans la ville. À ce jour, il n’est pas nécessaire de naviguer, comme les anciens voyageurs et navigateurs des étoiles ou de la boussole. L’époque de la découverte des ondes radio a considérablement simplifié la tâche de la navigation et ouvert de nouvelles perspectives à l’humanité dans de nombreux domaines de la vie et de l’activité. Avec la découverte de la possibilité de conquérir l’espace, une percée décisive a été franchie dans la détermination des coordonnées d’un objet sur Terre. Les satellites artificiels de la Terre sont devenus des stations de référence pour la radionavigation. Aujourd'hui, les systèmes de navigation par satellite sont devenus accessibles non seulement aux militaires ou aux marins, mais également aux simples citoyens, aux particuliers et aux entreprises pour qui la navigation est nécessaire.
Concept: Système de navigation par satellite
- système technique électronique complexe consistant en une combinaison d'équipements au sol et spatiaux, conçu pour déterminer l'emplacement (coordonnées géographiques et l'altitude), ainsi que les paramètres de mouvement (vitesse et direction du mouvement, etc.) pour les objets au sol, sur l'eau et dans l'air.
Système:
Les principaux éléments du système de navigation par satellite:
Groupement orbital
composé de plusieurs (de 2 à 30) satellites émettant des signaux radio spéciaux; Le système de contrôle et de surveillance au sol, qui comprend des unités permettant de mesurer la position actuelle des satellites et de leur transmettre les informations reçues pour ajuster les informations sur les orbites;
Réception du matériel client
("Navigateurs satellites"), utilisés pour déterminer les coordonnées;
Facultatif
:
Système radio d'information destiné à transmettre des corrections aux utilisateurs, permettant d'améliorer considérablement la précision de la détermination des coordonnées.
Action: Le principe de fonctionnement des systèmes de navigation par satellite repose sur la mesure de la distance entre l'antenne de l'installation (dont les coordonnées doivent être obtenues) et des satellites dont la position est connue avec une grande précision. La table de position de tous les satellites s'appelle un almanach, que tout récepteur de satellite doit avoir avant que les mesures ne commencent. Habituellement, le récepteur garde l’almanach en mémoire depuis le dernier arrêt et, s’il n’est pas obsolète, il l’utilise instantanément. Chaque satellite transmet dans son signal l'intégralité de l'almanach.
Ainsi, connaissant les distances à plusieurs satellites du système, en utilisant des constructions géométriques conventionnelles, basées sur l'almanach, on peut calculer la position d'un objet dans l'espace. La méthode de mesure de la distance entre le satellite et l'antenne du récepteur repose sur la détermination de la vitesse de propagation des ondes radio. Pour réaliser la possibilité de mesurer le temps de propagation d'un signal radio, chaque satellite du système de navigation émet des signaux horaires précis dans le cadre de son signal en utilisant une horloge atomique précisément synchronisée avec l'heure du système.
Lorsqu'un récepteur satellite est en fonctionnement, son horloge est synchronisée avec l'heure du système. Lors de la réception ultérieure de signaux, un délai est calculé entre l'heure de rayonnement contenue dans le signal lui-même et l'heure de réception du signal. Avec cette information, le récepteur de navigation calcule les coordonnées de l'antenne. La plupart des récepteurs de navigation utilisent l’effet Doppler pour obtenir des informations sur la vitesse. En outre, en accumulant et en traitant ces données pendant un certain temps, il devient possible de calculer des paramètres de mouvement tels que la vitesse (actuelle, maximale, moyenne), la distance parcourue, etc. En réalité, le système est beaucoup plus complexe.
Vous trouverez ci-dessous des problèmes qui nécessitent des techniques spéciales pour les résoudre:
L'absence d'horloge atomique dans la plupart des récepteurs de navigation. Cet inconvénient est généralement éliminé par la nécessité d'obtenir des informations auprès d'au moins trois (navigation bidimensionnelle à une hauteur connue) ou de quatre (navigation tridimensionnelle); (S'il y a un signal d'au moins un satellite, vous pouvez déterminer l'heure actuelle avec une bonne précision). L'hétérogénéité du champ gravitationnel de la Terre, affectant les orbites des satellites; Hétérogénéité de l'atmosphère, grâce à laquelle la vitesse et la direction de propagation des ondes radioélectriques peuvent varier dans certaines limites; Réflexion des signaux des objets au sol, ce qui est particulièrement visible dans la ville; L'impossibilité de placer des émetteurs de grande puissance sur les satellites, c'est pourquoi la réception de leurs signaux n'est possible qu'en visibilité directe à l'extérieur.
Histoire et perspectives de développement.
L'histoire du développement des systèmes de navigation par satellite a plus de 40 ans. Le début du développement du système national de navigation par satellite (SRNS), comme on le considère le plus souvent, a été lancé le 4 octobre 1957 en Union soviétique, le premier de l’histoire de l’humanité, le satellite artificiel de la Terre (AES). Pour la première fois, le Conseil scientifique et technique de 1946 a fait état de la nécessité de créer un tel système répondant aux besoins de nombreux départements dans les discours de spécialistes de l'Institut de recherche et de technologie radiotechnique de Léningrad. Au milieu des années 70, le système de navigation par satellite "Cicada" a été créé en URSS et dans les années 60 aux États-Unis - le système de transit, qui a ensuite subi de nombreux changements et améliorations technologiques. Ces systèmes ont été développés par ordre du ministère de la Défense des pays et étaient spécialisés dans la navigation globale opérationnelle d'objets en mouvement basés au sol. Toutefois, ce n'est qu'en décembre 1976 que la résolution du Comité central du PCUS et du Conseil des ministres de l'URSS "Sur le déploiement du système unifié de navigation spatiale" a été adoptée. Dans les systèmes de navigation par satellite existants, les consommateurs n'étaient pas satisfaits de la précision des résultats et du temps requis pour déterminer les coordonnées - la création de systèmes de nouvelle génération était nécessaire. En conséquence, en Union soviétique au début des années 80 du siècle dernier, le système de navigation par satellite a été inventé. Les systèmes de navigation par satellite nés s'appelaient GPS aux États-Unis et GLONASS en URSS. En conséquence, le premier satellite américain a été lancé en février 1978 et le premier satellite soviétique plus tard - le 12 octobre 1982. Le 24 septembre 1993, GLONASS a été officiellement mis en service. En 1995, sa constellation de satellites était de 24 véhicules. Par la suite, faute de financement, le nombre de satellites en activité a diminué. En août 2001, le programme cible fédéral Système de navigation globale a été adopté, selon lequel une couverture complète du territoire russe était prévue? début 2008 et le système aurait atteint des proportions globales au début de 2010. Pour résoudre ce problème, il était prévu d'effectuer six lancements de lanceurs en 2007, 2008 et 2009 et de mettre 18 satellites en orbite. Ainsi, le groupe devrait disposer à nouveau de 24 véhicules d'ici la fin de 2009. Dans le même temps, la précision de la localisation des utilisateurs du système atteindra 1 à 5 mètres, comme avec le GPS. Selon l’Institut central de recherche en génie mécanique, à ce jour, le groupe orbital du système GLONASS compte 19 satellites. Quatorze d'entre eux sont utilisés aux fins prévues, 3 - au stade de l'entrée dans le système (ils ont été lancés le 25.09.2008), 1 - temporairement en maintenance, 1 - au stade de la suppression du système. Selon les prévisions, d'ici la fin de 2008, trois appareils plus anciens seront retirés du système.
Le programme de développement à long terme du système de navigation spatiale est mis en œuvre selon les étapes intégrées suivantes:
Étape 1
(jusqu'en 2003). Maintenir GLONASS CNS au minimum q  le faible niveau des lancements de l’engin spatial Glonass (Fig.), la modernisation du circuit d’échange d’informations du complexe de contrôle au sol, l’extension de l’équipement des consommateurs avec des équipements fonctionnant sur les signaux de deux systèmes: GLONASS et GPS. Développement et création du satellite "Glonass-M".
le faible niveau des lancements de l’engin spatial Glonass (Fig.), la modernisation du circuit d’échange d’informations du complexe de contrôle au sol, l’extension de l’équipement des consommateurs avec des équipements fonctionnant sur les signaux de deux systèmes: GLONASS et GPS. Développement et création du satellite "Glonass-M".
Euh  appuyez sur 2
(jusqu’en 2005) Déploiement d’une constellation orbitale fonctionnant jusqu’à 18 unités basée sur le satellite Glonass-M (Fig.) d’une masse de 1 415 kg. et la durée de vie active de 7 ans, ce qui est bien plus que les satellites précédents de la série. Passage à la nouvelle gamme de fréquences du signal de navigation. Tester la technologie de prise en charge temporelle des éphémérides à l'aide de mesures inter-satellites. Extension de la nomenclature et du nombre de consommateurs travaillant sur les signaux des systèmes GLONASS et GPS SPS. Développement et création de vaisseaux spatiaux de petite masse Glonass-K.
appuyez sur 2
(jusqu’en 2005) Déploiement d’une constellation orbitale fonctionnant jusqu’à 18 unités basée sur le satellite Glonass-M (Fig.) d’une masse de 1 415 kg. et la durée de vie active de 7 ans, ce qui est bien plus que les satellites précédents de la série. Passage à la nouvelle gamme de fréquences du signal de navigation. Tester la technologie de prise en charge temporelle des éphémérides à l'aide de mesures inter-satellites. Extension de la nomenclature et du nombre de consommateurs travaillant sur les signaux des systèmes GLONASS et GPS SPS. Développement et création de vaisseaux spatiaux de petite masse Glonass-K.
Étape 3
(jusqu'en 2010). Déploiement de la constellation orbitale standard sur la base d’un satellite Glonass-K plus petit, plus perfectionné et sans pression (Fig. Non, car il ne fait que se développer) avec une durée de vie active considérablement plus longue, jusqu’à 10 ans, une masse inférieure à 700 kg environ, deux fois plus grande moins que le "Glonass-M". Élargir l’utilisation des liaisons radio intersatellites pour résoudre les problèmes de soutien en temps éphéméride autonome, de contrôle opérationnel et de surveillance des engins spatiaux, en garantissant l’intégrité. Création d'un réseau de stations de surveillance au sol pour GLONASS CLS et compléments fonctionnels. Équipement du parc de consommation NAP fonctionnant sur les signaux GLONASS, GPS, Galileo.
Les satellites de navigation de cette série seront mis en orbite soit par lancements simples effectués par le lanceur Soyouz-2 avec l'étage supérieur Fregat, soit par six véhicules réunis - par le lanceur Proton avec l'étage supérieur Breeze-M. En outre, leur mise en orbite est possible avec l'aide du transporteur indien GSLV. Ainsi, en 2004 à Moscou, un accord a été signé avec l’Inde concernant le lancement de deux satellites de navigation en 2006-2008. Les appareils Glonass-K sont créés sur la base d'une plate-forme non hermétique plus progressive, qui, selon les experts, impose des exigences croissantes à l'équipement et à la base des éléments, qui devront fonctionner en espace ouvert. Certains des éléments utilisés seront peut-être étrangers, mais comme le système de navigation est russe, il devrait fonctionner principalement sur nos éléments, sur nos appareils. À ce jour, la possibilité technologique d'installer le module de navigation GLONASS dans les téléphones mobiles est en cours de développement. Les téléphones équipés de navigateurs GPS existent déjà et sont largement utilisés dans le monde entier, y compris en Russie. Il existe déjà un certain nombre de récepteurs GPS / GLONASS sur le marché des équipements de navigation - ils sont conçus spécifiquement pour la Russie et ont des utilisations très différentes.
Les experts estiment que les principales tâches de la période actuelle de redressement et de développement du GLONASS sont les suivantes:
Augmenter la fiabilité et prolonger le délai de fonctionnement continu du vaisseau spatial Glonass à 20 ans;
Développer un groupe orbital de 6 avions au maximum avec 48 satellites afin de garantir un positionnement de haute précision en terrain fermé (ce programme a déjà été adopté par les États-Unis);
Assurer la sécurité électronique et l'indépendance du système;
Examiner la faisabilité d'exclure le système de sauvetage Cospas, l'emplacement des explosions nucléaires et les communications inter-satellites, qui ne font que remplacer la charge utile, du système «passagers».
Et plus important encore - attirer sur le travail de ces spécialistes, qui sont capables de rapporter toute la vérité sur GLONASS. GLONASS est une priorité de tous les programmes spatiaux, car sans cela, la Russie restera sans défense dans quelques années. Sans GLONASS, une réponse asymétrique à la défense antimissile américaine et à d'autres menaces potentielles est en principe impossible. Par conséquent, le président demande avec insistance la relance de GLONASS dans les meilleurs délais.
Le principe de fonctionnement.
Les satellites GLONASS émettent en permanence deux types de signaux de navigation: le signal de navigation de précision standard (ST) dans la bande L1 (1,6 GHz) et le signal de navigation de haute précision (BT) dans les bandes L1 et L2 (1,2 GHz). Les informations fournies par le signal CT sont disponibles pour tous les consommateurs de manière permanente et globale et, lors de l’utilisation de récepteurs GLONASS, il est possible de déterminer:
* coordonnées horizontales avec une précision de 50-70 m (probabilité de 99,7%);
* coordonnées verticales avec une précision de 70 m (probabilité 99,7%);
* composantes du vecteur vitesse avec une précision de 15 cm / s (probabilité 99.7%)
* heure précise avec une précision de 0,7 µs (probabilité de 99,7%).
Cette précision peut être considérablement améliorée en utilisant la méthode de navigation différentielle et / ou des méthodes de mesure spéciales supplémentaires.
Le signal BT est principalement destiné aux consommateurs du ministère de la Défense de Russie et son utilisation non autorisée n'est pas recommandée. La question de la fourniture d’un signal VT aux consommateurs civils est à l’étude.
Pour déterminer les coordonnées spatiales et l'heure exacte, il est nécessaire de recevoir et de traiter les signaux de navigation d'au moins 4 satellites GLONASS. Lors de la réception de signaux radio de navigation, le récepteur GLONASS, utilisant des méthodes d'ingénierie radio bien connues, mesure la distance aux satellites visibles et mesure leur vitesse.
Simultanément aux mesures effectuées dans le récepteur, un traitement automatique des horodatages et des informations numériques contenues dans chaque signal radio de navigation est effectué. Les informations numériques décrivent la position d’un satellite donné dans l’espace et dans le temps (éphémérides) par rapport à une seule échelle de temps pour le système et dans le système de coordonnées cartésiennes associé à la géocentrique. De plus, les informations numériques décrivent la position des autres satellites du système (almanach) sous la forme d'éléments képlériens de leurs orbites et contiennent quelques autres paramètres. Les résultats de mesure et les informations numériques reçues sont les données initiales permettant de résoudre la tâche de navigation consistant à déterminer les coordonnées et les paramètres de mouvement. Le problème de navigation est résolu automatiquement dans le dispositif informatique du récepteur, à l’aide de la méthode bien connue des moindres carrés. À la suite de la solution, trois coordonnées de la position du consommateur, sa vitesse de déplacement sont déterminées et l’échelle de temps du consommateur est liée à l’échelle haute précision du temps universel coordonné (UTC).
GLONASS aujourd'hui.
Onze satellites GLONASS-M (dont l'un a été lancé en 2003, deux en 2005 et trois en 2006) comptent parmi les engins spatiaux opérationnels (SC), avec une période de garantie de vie active de 7 ans. Contrairement aux appareils de la génération précédente, ces satellites émettent déjà deux signaux destinés aux consommateurs civils, ce qui peut considérablement améliorer la précision de positionnement.
Conformément aux instructions du Président de la Fédération de Russie, la constellation minimale de 18 satellites devrait être déployée en 2007. Le groupe complet de 24 satellites conformément au programme cible fédéral Système de navigation globale devrait être déployé en 2010.
Les satellites GLONASS-M de la constellation orbitale seront au moins jusqu'en 2015. Les essais en vol des satellites non pressurisés de la nouvelle génération «GLONASS-K» aux caractéristiques améliorées (la période de garantie portée à 10 ans et la troisième fréquence en bande L pour les consommateurs civils) devraient commencer en 2009. Ce satellite sera deux fois plus léger que son prédécesseur (environ 700 kg contre 1415 kg chez Glonass-M)
À l'avenir, après le déploiement de la constellation orbitale de 24 satellites, il sera nécessaire de lancer un groupe de lanceurs par an de deux satellites GLONASS-K sur la porteuse Soyouz, ce qui réduira considérablement les coûts d'exploitation.
Le 29 novembre 2006, lors de sa visite à la RIRT, le ministre de la Défense, Sergueï Ivanov, a annoncé que le système GLONASS serait bientôt disponible pour un usage civil.
Le 18 mai 2007, le président russe Vladimir Poutine a signé un décret selon lequel l'accès au système de navigation russe GLONASS sera fourni gratuitement et sans restriction aux consommateurs russes et étrangers.
Les satellites GLONASS seront lancés à partir du cosmodrome de Plesetsk.
MOSCOU, 9 avril - RIA News. À l'avenir, le lancement des satellites de navigation GLONASS ne se fera pas depuis Baïkonour, mais depuis le cosmodrome de Plesetsk sur les lanceurs Soyouz-2, a annoncé le commandant adjoint des Forces spatiales russes, Alexander Kvasnikov. «Il est prévu de lancer progressivement les lancements des satellites du système de navigation mondial russe GLONASS de Baïkonour au cosmodrome de Plesetsk. Ces lancements devraient avoir lieu sur des lanceurs modernisés Soyouz-2 », a déclaré lundi Kvasnikov lors d'un forum international sur la navigation par satellite.
Selon lui, le transfert des lancements de Baïkonour à Plesetsk garantira l'indépendance de la Russie en termes de lancement de son propre vaisseau spatial en orbite.
Comme l'a souligné le commandant adjoint des forces spatiales, le champ d'application des navigateurs satellites GLONASS dans l'armée s'étend de la fourniture d'informations à un soldat sur ses coordonnées à la fourniture d'informations de navigation à des unités militaires entières.
«Avec le lancement des satellites GLONASS, une unité compacte est installée à bord du véhicule de lancement, fournissant des mesures de trajectoire continue de haute précision pendant le vol de la fusée. Auparavant, une méthode exigeant l’implication d’un grand nombre de personnes et de fonds, reposant sur le contrôle du vol de la fusée par des points de mesure de la trajectoire au sol », a déclaré Kvasnikov.
Selon lui, des essais du matériel terrestre et portable du système de navigation GLONASS sont en cours dans les forces spatiales de la Fédération de Russie.
"Son utilisation permettra l'utilisation de récepteurs GLONASS dans toutes les conditions météorologiques, fournissant une référence extrêmement précise aux coordonnées et à l'heure, en particulier sur les terrains très accidentés", a déclaré le commandant adjoint.
Comparaison de GLONASS et GPS.

Quelques caractéristiques des principaux systèmes de navigation par satellite (NAVSTAR et GLONASS): Les deux systèmes ont un double objectif - militaire et civil, ils émettent donc deux types de signaux: l’un avec une précision réduite pour la détermination des coordonnées (~ 100 m) à usage civil et l’autre de grande précision (~ 10 -15 m et plus précisément) à usage militaire. Les satellites NAVSTAR sont situés dans six avions à une altitude d’environ 20 180 km. Les satellites GLONASS (code «Hurricane») se situent dans trois avions à une altitude d’environ 19 100 km. Le nombre nominal de satellites dans les deux systèmes est de 24. La constellation NAVSTAR était dotée de tout son personnel en avril 1994 et a été maintenue depuis; la constellation GLONASS a été entièrement déployée en décembre 1995, mais s'est considérablement dégradée depuis. Pour le moment, il se remet activement. Les deux systèmes utilisent des signaux basés sur ce qu'on appelle. "Séquences de pseudo-bruit", dont l'utilisation leur confère une immunité au bruit élevée et une grande fiabilité à une faible puissance d'émission des émetteurs. Conformément à l'objectif, il existe deux fréquences de base dans chaque système: L1 (précision standard) et L2 (haute précision). Pour NAVSTAR, L1 = 1575,42 MHz et L2 = 1227,6 MHz. Dans GLONASS, on utilise l’espacement des fréquences entre les signaux, c’est-à-dire que chaque satellite fonctionne à sa propre fréquence. Par conséquent, L1 s’étend de 1602,56 à 1615,5 MHz et L2 de 1246,43 à 1256,53. Le signal en L1 est disponible pour tous les utilisateurs, le signal en L2 n’est disponible que pour les militaires (c’est-à-dire qu’il ne peut pas être déchiffré sans clé secrète spéciale). Chaque satellite du système, en plus des informations de base, transmet également des informations auxiliaires nécessaires au fonctionnement en continu des équipements de réception. Cette catégorie comprend l’almanach complet de toute la constellation de satellites transmise de manière séquentielle sur plusieurs minutes. Ainsi, le démarrage du périphérique de réception peut être assez rapide s'il contient un almanach réel (environ 1 minute) - on parle de «démarrage à chaud», mais cela peut prendre jusqu'à 15 minutes si le récepteur est forcé de recevoir un almanach complet. n “Démarrage à froid”. La nécessité d’un «démarrage à froid» se pose généralement lors de la première mise sous tension du récepteur, ou s’il n’a pas été utilisé pendant longtemps.Mesure différentielle
Des modèles séparés de récepteurs satellites permettent de produire ce que l'on appelle. "Mesure différentielle" de la distance entre deux points avec une grande précision (centimètres). Pour ce faire, mesurez la position du navigateur en deux points sur une courte période. En même temps, bien que chaque mesure ait une précision de l’ordre de 10-15 mètres sans système de correction au sol et de 10 à 50 cm avec un tel système, la distance mesurée présente une erreur beaucoup plus petite, car les facteurs qui interfèrent avec la mesure (erreur d’orbite du satellite, hétérogénéité atmosphérique, etc.) d.) dans ce cas, sont déductibles mutuellement. En outre, plusieurs systèmes envoient des informations de clarification ("correction différentielle aux coordonnées"), ce qui permet d'augmenter la précision de mesure des coordonnées du récepteur à dix centimètres. La correction différentielle est basée sur des objets géostationnaires (satellites, stations de base terrestres), est généralement payée (le signal ne peut être déchiffré que par un récepteur spécifique après avoir payé "l'abonnement au service"). Actuellement (2006), il existe un système européen gratuit EGNOS (services européens de navigation par recouvrement géostationnaire), basé sur deux satellites géostationnaires, offrant une grande précision (jusqu'à 30 cm), mais fonctionnant par intermittence et de façon non fiable. En Amérique du Nord, son pendant est le système WAAS.
Manque de systèmes GPS.
Malgré tous les avantages, les systèmes GPS présentent des inconvénients. Par exemple, un récepteur GPS peut être désactivé à tout moment, par exemple pour des raisons de sécurité aux États-Unis. En outre, l’introduction de la technologie GPS implique la disponibilité de cartes électroniques détaillées d’une échelle pouvant aller jusqu’à 100 m, qui ne sont pas disponibles dans le commerce dans tous les pays. Il est impossible de ne pas mentionner le fait que lors du calcul des coordonnées, le système à satellites permet des erreurs. La nature de ces erreurs est différente. Les principales sources d'erreur affectant la précision des calculs de navigation dans le système GPS sont notamment:
Erreurs dues au mode d’accès sélectif (S / A). En utilisant ce mode, le département de la Défense des États-Unis réduit délibérément la précision de localisation des civils. En mode S / A, des erreurs artificielles sont générées qui sont insérées dans le signal à bord des satellites GPS afin de rendre les mesures de navigation plus rugueuses. De telles erreurs sont des données incorrectes sur l'orbite du satellite et la distorsion des lectures de son horloge dues à l'introduction d'un signal pseudo-aléatoire supplémentaire. La magnitude de l'écart type due à l'influence de ce facteur est d'environ 30 m.
Erreurs associées à la propagation des ondes radio dans l'ionosphère. Les retards dans la propagation des signaux lorsqu'ils traversent les couches supérieures de l'atmosphère entraînent des erreurs de l'ordre de 20 à 30 m l'après-midi et de 3 à 6 m la nuit. Bien que le message de navigation transmis par le satellite GPS contienne les paramètres du modèle à ionosphère, la compensation du retard effectif est, au mieux, de 50%.
Erreurs associées à la propagation des ondes radio dans la troposphère. Se produisent lorsque les ondes radio traversent les couches inférieures de l’atmosphère. Les valeurs d'erreur de ce type lors de l'utilisation de signaux avec le code С / А ne dépassent pas 30 m.
Erreur éphéméride. Les erreurs sont dues à la divergence entre la position réelle du satellite GPS et sa position calculée, qui est déterminée à partir des données du signal de navigation transmis par le satellite. La valeur d'erreur n'est généralement pas 3m.
L’heure de départ de l’échelle de temps des satellites est due à l’écart entre les échelles de temps des différents satellites. Il peut être éliminé à l'aide de stations de suivi au sol ou en compensant la dérive d'échelle de temps dans un mode de positionnement différentiel.
L'erreur dans la détermination de la distance au satellite est un indicateur statistique. Il est calculé pour un satellite spécifique et un intervalle de temps spécifié. L'erreur n'est pas corrélée avec d'autres types d'erreurs. Sa valeur ne dépasse généralement pas 10 m.
DÉSAVANTAGES DU SYSTÈME GLONASS:
La nécessité de décaler la gamme de fréquences vers la droite, car GLONASS interfère actuellement avec le fonctionnement des communications mobiles par satellite et de la radioastronomie
Lors du changement des éphémérides du satellite, les erreurs de coordonnées en mode normal augmentent de 25 à 30 m et, en mode différentiel, elles dépassent 10 m.
La correction de la seconde en cours perturbe la continuité du signal GLONASS. Cela entraîne de grosses erreurs dans la détermination des coordonnées de la localisation du consommateur, ce qui est inacceptable pour l'aviation civile;
La difficulté de recalculer les données des systèmes GLONASS et GPS en raison de l’absence d’une matrice officiellement publiée sur la transition entre les systèmes de coordonnées utilisés.
L'Union européenne développe un satellitenavigation galileo. La Chine développe également son propresystème de navigation Beidou, d’ici à la fin de 2008, il couvrira le territoire de la Chine et la plupart des pays asiatiques voisins.
Galilée - système de satellitenavigationen cours de développement par l'Union européenne. Le concept unique a été adopté en 1999 et le plan de développement initial a été approuvé en 2003 et prévoyait le lancement du système en 2008.
Cependant, il a été contrecarré en raison de désaccords entre les gouvernements des pays de l'UE et de la réticence des entreprises privées à investir dans Galileo. Un consortium d'entreprises privées composé d'EADS, de Thales, d'Inmarsat, d'Alcatel-Lucent, de Finmeccanica, d'AENA, d'Hispasat et du groupe allemand comprenant Deutsche Telekom et du Centre aérospatial allemand.
En mai 2007, le consortium s'est retiré du projet et la Commission européenne a pris la direction de Galileo. Désormais, seul un des 30 satellites prévus est en orbite, le second devrait être mis en orbite le 27 avril 2008.
À l'heure actuelle, l'UE a consacré environ 1 milliard d'euros au projet.
Contrairement au GPS américain et au GLONASS russe, le système Galileo n’est contrôlé ni par le gouvernement ni par les institutions militaires. Le développement est réalisé par l'ESA. Le coût total de la construction d’un système est estimé à 3,8 milliards d’euros. Le 30 novembre 2005, le premier satellite du système Galileo a été livré au cosmodrome de Baïkonour. Le 28 décembre 2005 à 8 h 19, le satellite GIOVE-A (élément de validation en orbite Galileo) a été lancé sur une orbite calculée dont l’altitude est supérieure à 23 000 km et dont l’inclinaison est de 56 ° C. dimensions: longueur - 1,2 m, diamètre - 1,1 m La durée de vie active est de 12 ans. «ESA» L’Agence spatiale européenne (ESA) est une organisation internationale créée en 1975 dans le but d’unir ses efforts pour conquérir l’espace au profit des Européens de Galileo.
Influence de l'ionosphère sur les caractéristiques des signaux radio transionosphériques
Les ondes électromagnétiques se propageant dans l'ionosphère subissent une grande variété de perturbations. La caractéristique principale de l'ionosphère, qui détermine le changement de paramètres de l'onde radio, est le contenu électronique intégral (complet).Je (t ) ou ses dérivés (dans le temps et dans l’espace)Je ´ t (t ), Je x (t ) et Je y (t a) le long du chemin de propagation.
Les changements de PSE peuvent être divisés en réguliers et irréguliers. Des changements réguliers (saisonniers, quotidiens), du moins pour l'ionosphère de latitudes moyennes magnétiquement silencieuses, sont décrits par des modèles qui donnent une précision relative des prévisions de PES allant jusqu'à 50 - 80%. Les changements irréguliers (variations) sont associés à des irrégularités ionosphériques de nature diverse, dont le spectre est loi de puissance.
À la suite d’études récentes, il est devenu évident que les perturbations de l’ionosphère pendant les orages magnétiques affectent la dégradation du signal et les défaillances des systèmes GPS, non seulement à l’équateur et dans la zone polaire, mais même aux latitudes moyennes. Cependant, la question des causes et des mécanismes spécifiques de cette influence reste largement ouverte.
La principale tâche des recherches futures consiste à étudier les mécanismes physiques des variations multi-échelles du contenu total en électrons dans l'ionosphère lors de perturbations géomagnétiques dans l'espace proche de la Terre, accompagnées d'une dégradation des signaux et de défaillances de systèmes de radio par satellite. Ces études doivent être complètes et associer au maximum un certain nombre de moyens expérimentaux indépendants de surveillance de l’ionosphère (ionosondes numériques, radars à dispersion incohérente, ionosondes à modulation de fréquence, etc.).
Précision GPS
Chaque ensemble complet de données comprend un modèle ionosphérique, qui est utilisé par le récepteur pour estimer le retard de phase d’un signal lorsqu’il traverse la ionosphère à n’importe quel emplacement et à tout moment. Méthodes de mesure de la distance au satellite en utilisant un code pseudo-aléatoire. Pseudo-distance - distance entre l'antenne du récepteur et le satellite mesurée avec un code pseudo-aléatoire. Comme mentionné précédemment, ces distances sont nécessaires pour calculer les coordonnées. La procédure de détermination de la pseudo-plage peut être décrite comme suit.
Imaginez que l'horloge du satellite et le récepteur soient parfaitement synchronisés l'un avec l'autre. Lorsque le code PRN est transmis depuis le satellite, le récepteur lit une copie exacte du même code. Après un certain temps, le code transmis par le satellite sera reçu par le récepteur. En comparant le code transmis et sa copie exacte, le destinataire peut calculer le temps nécessaire pour que le code parvienne au destinataire. Multiplier le temps de trajet à la vitesse de la lumière nous donne la distance entre le satellite et le récepteur. Mesure de distance par code Malheureusement, l'hypothèse selon laquelle le récepteur et l'horloge du satellite sont parfaitement synchronisés n'est pas tout à fait correcte. Cette méthode de calcul de la distance nécessiterait une synchronisation très précise de l'horloge satellite et du récepteur. Les satellites GPS étant des horloges atomiques très précises, il est très coûteux de fournir un récepteur avec de telles horloges, leur prix pouvant atteindre 20 000 $.
Le problème de synchronisation de l'horloge est résolu en considérant l'erreur d'horloge du récepteur comme une inconnue supplémentaire dans les équations de navigation.
La distance entre le satellite et le récepteur est la somme du nombre total de cycles complets plus le cycle fractionnel entre le récepteur et le satellite multiplié par la longueur d'onde de la porteuse. La plage déterminée par la phase de porteuse a une précision bien supérieure à celle obtenue par le code.
Il y a cependant un problème. L'onde porteuse est une onde sinusoïdale, ce qui signifie que tous les cycles se ressemblent. Par conséquent, un récepteur GPS ne peut pas distinguer un cycle d'un autre. En d'autres termes, le récepteur, une fois allumé, ne peut pas déterminer le nombre total de cycles complets entre le satellite et le récepteur. Il ne peut déterminer que la fraction du cycle (avec une précision d'au moins 2 mm), tandis que le nombre total de cycles reste inconnu ou ambigu.
Heureusement, le récepteur peut surveiller le changement de phase lorsqu'il est allumé. Cela signifie que l'incertitude initiale disparaît avec le temps. La détermination du nombre total de cycles de porteuse (longueurs d'onde) entre l'antenne et le satellite est appelée résolution d'ambiguïté - recherche de la valeur entière du nombre de longueurs d'onde. Pour les mesures de post-traitement, utilisées pour déterminer un emplacement avec une précision centimétrique, cette valeur entière est déterminée lors du traitement sur un ordinateur. Pour les mesures en temps réel, utilisées pour déterminer la position avec une précision centimétrique, cette valeur entière est déterminée au cours d’un processus appelé initialisation.
Un signal de saut de boucle est un saut vers un nombre entier de cycles dans la phase de porteuse lors de la mesure de la distance. La perte de signal peut être causée par un obstacle entre le signal et le satellite. Les interférences radio, les perturbations ionosphériques et la dynamique élevée du récepteur peuvent également être une perte de signal causale. De plus, le glissement de la boucle peut se produire en cas de défaillance du récepteur. Un saut de boucle peut durer n'importe quelle durée.
Vous devez connaître les coordonnées de votre station de base aussi précisément que possible, car la précision résultant de la correction différentielle dépend directement de la précision des coordonnées de la station de base. Il existe deux méthodes pour effectuer une correction différentielle, en temps réel et en post-traitement.
Je crois que le développement du SNA contribue au bon développement et au pays qui possède le SNA lui-même. L'exploration active de l'espace extra-atmosphérique près de notre planète se poursuit. Les réalisations dans le domaine de l'électronique radio sont d'une grande aide, non seulement à des fins militaires, mais également à des fins civiles. Grâce à HF, par exemple, la recherche de touristes de montagne est devenue beaucoup plus facile, HH est l’aide du conducteur sur les routes et pas seulement. Quoi qu’il en soit, c’est bien d’avoir un mauvais côté ... il ya une pollution constante de l’espace proche de la Terre par les satellites déjà utilisés et leurs fragments. Nous devons combler nos besoins sans nuire à l'environnement, ce que nous obtenons rarement .... CENTRE SCIENTIFIQUE ET D'INFORMATION DE COORDINATION (2002). - description technique officielle des paramètres et du signal GLONASS. Vérifié le 14 décembre 2009.
INSTITUT DE RECHERCHE SCIENTIFIQUE RUSSE POUR L'INSTRUMENT SPATIAL (2008). - description technique officielle des paramètres et du signal GLONASS. Vérifié le 14 décembre 2009.
De nos jours, plusieurs systèmes de navigation utilisent des satellites artificiels de la Terre. Mais un service de positionnement véritablement mondial, dans presque n'importe quel endroit de notre planète, est réalisé par deux personnes: le GLONASS russe et le GPS américain.
Système de positionnement GPS global
Les fonctionnalités du système de positionnement GPS américain sont similaires à celles du système russe GLONASS. Son objectif principal est de déterminer avec précision les coordonnées du consommateur, les composants du vecteur vitesse et la référence à l'échelle de temps du système.
De même national, le système GPS a été développé pour le département de la Défense des États-Unis et est sous son contrôle. Comme le système GLONASS, le GPS comprend un segment spatial, un complexe de mesure et de mesure basé au sol et un segment consommateur.
Système de navigation par satellite Galileo
Au cours des prochaines années, l'Union européenne (UE) et l'Agence spatiale européenne (ESA) envisagent de mettre en service un nouveau système européen global de navigation par satellite, Galileo (Galileo). L’existence d’un deuxième système de satellites GNSS pleinement opérationnel offre des avantages considérables aux consommateurs civils du monde entier. Le lancement réussi du projet Galileo fera plus que doubler le nombre de satellites de navigation disponibles pour les utilisateurs. Une telle augmentation du nombre de satellites profitera non seulement au travail hors ligne, mais améliorera également la qualité de la détermination des coordonnées et la capacité de l'équipement GPS de lever l'ambiguïté de la phase de la porteuse pour le signal de satellite suivi.
Caractéristiques comparatives
Système de navigation régionale par satellite indien
Le gouvernement indien a approuvé le 9 mai 2006 un projet de déploiement du système de navigation régionale par satellite indien (IRNSS) doté d'un budget de 14,2 milliards de roupies pour les 6 à 7 prochaines années. La constellation de satellites IRNSS sera composée de sept satellites en orbite géosynchrone. Les sept satellites auront une visibilité radio continue avec les stations de contrôle indiennes.
Le segment sol de l'IRNSS aura une station de surveillance, une station, des réservations, une station de surveillance et de contrôle du système embarqué. La société publique ISRO est responsable du déploiement de l'IRNSS, qui sera entièrement sous le contrôle du gouvernement indien. Les récepteurs de navigation qui recevront les signaux IRNSS seront également développés et produits par des sociétés indiennes.
Système de navigation par satellite en Chine
La Chine, le pays dont la croissance est la plus rapide au monde, a également commencé à construire son propre système de navigation par satellite, Compass.
Le segment spatial du système de navigation par satellite Compass sera constitué de 5 satellites en orbite géostationnaire (OSG) et de 30 satellites en orbite terrestre moyenne.
Deux types de services seront fournis. Pour une utilisation générale, un signal sera transmis, dont le traitement permettra d’atteindre une précision de positionnement de 10 m, une vitesse de 0,2 m / s et de déterminer l’heure actuelle avec une précision de 50 ns.
Un nombre limité d'utilisateurs sera capable de mesurer avec une plus grande précision.
La Chine souhaite collaborer avec d'autres pays au développement de la navigation par satellite afin de permettre à Compass d'interagir avec d'autres systèmes de navigation mondiaux.
Système de navigation japonais Quasi-Zenith (QZSS)
À l’origine, le QZSS japonais a été conçu en 2002 en tant que système commercial avec un ensemble de services pour la communication mobile, la radiodiffusion et une utilisation répandue pour la navigation au Japon et dans les régions voisines de l’Asie du Sud-Est. Le premier lancement du satellite pour QZSS était prévu pour 2008. En mars 2006, le gouvernement japonais a annoncé que le premier satellite ne serait pas destiné à un usage commercial et serait entièrement financé par des fonds budgétaires afin de prendre des décisions en vue de résoudre les problèmes de navigation. Ce n’est qu’après la réussite des essais du premier satellite que la deuxième étape commencera et que les prochains satellites assureront pleinement la portée des services planifiée précédemment.
Alexey Mikhailov, chef de secteur, Centre scientifique et de recherche «Okhrana» des institutions de l’État fédéral
Récemment, on a eu de plus en plus recours aux systèmes de navigation mondiaux pour déterminer les coordonnées des objets de protection fixes et mobiles.
Ne restez pas en dehors de l'utilisation des progrès modernes en matière de technologie et de sécurité privée. Dans les départements de sécurité, les systèmes de surveillance de la navigation tels qu'Almaz (Kodos-B LLC, Moscou), Argo-Strazh (Systèmes de navigation CJSC, Omsk), Arkan CJSC sont utilisés depuis longtemps. BaltAvtoPoisk, Saint-Pétersbourg, Inflow GPS LLC (Bureau de la sécurité, Sokrat, Irkoutsk).
Ceux-ci et beaucoup d’autres systèmes de navigation sont basés sur un récepteur GPS (le système de navigation Arkan peut également utiliser la méthode traditionnelle de radiogoniométrie pour déterminer la position d’un objet). Ainsi, les employés qui utilisent ces systèmes dans leur travail doivent avoir une compréhension générale des principes de fonctionnement du GPS et bien connaître cela peut être exigé de tels systèmes, et ce qu’on ne devrait pas en attendre.
Comprendre les principes des systèmes de navigation et leur bon fonctionnement est la clé du succès du travail.
Derrière la mystérieuse abréviation GPS se trouve le système de positionnement global, un système de positionnement global. Initialement, le projet avait été créé et utilisé par l’armée américaine comme moyen de déterminer les coordonnées en temps réel partout dans le monde. Il s’appelait Navstar (système de navigation avec chronométrage et télémétrie), tandis que l’abréviation GPS est apparue plus tard.
Principe de fonctionnement du GPS
Le principe de la triangulation constitue la base du fonctionnement de tout système de navigation, c.-à-d. déterminer l'emplacement d'un objet à partir d'une distance allant jusqu'à trois points connus de l'espace.
Pour simplifier, supposons que nous avons trois satellites fixes et que nous connaissons leurs coordonnées avec une grande précision, puis, en analysant le temps de propagation du signal radio émis de manière synchrone, nous déterminerons nos coordonnées dans un espace tridimensionnel. La distance par rapport à la cible, en analysant l'heure d'arrivée du signal radio réfléchi par l'objet, a été déterminée au radar au début du XXe siècle, le même principe est utilisé dans les systèmes de navigation par satellite.
Malheureusement, c’est là que la similitude entre les systèmes de localisation d’objets traditionnels et satellites est épuisée. Dans la réalité, les satellites se déplacent très rapidement sur leurs orbites à une altitude d’environ 20 000 km. Par conséquent, sur Terre, nous ne connaissons pas l'heure du rayonnement synchrone des satellites ni leurs coordonnées.
Pour résoudre ces contradictions, les développeurs ont décidé d'installer une horloge atomique à bord des satellites. Ils sont extrêmement précis et coûteux. Ils coûtent environ 100 000 dollars et chaque satellite en possède 4, de sorte que vous puissiez garantir un fonctionnement fiable. Ainsi, le problème de la synchronisation (émission simultanée d'un signal radio) par satellite a été résolu.
La question de la localisation du satellite en orbite est résolue en transmettant à partir des stations de poursuite au sol les données relatives à leurs orbites au centre de commande, où les éléments affinés des trajectoires sont calculés. Ces paramètres sont entrés dans l’almanach et transmis aux satellites, qui, à leur tour, envoient ces informations à tous les récepteurs en exploitation. Pour contrôler les orbites et les coordonnées des satellites, il existe quatre stations de suivi au sol,
systèmes de communication et centre de contrôle, contrôlés par le département américain de la Défense. Compte tenu du fait que le vol à 20 km d’altitude a lieu dans un espace sans air, il est décrit avec une grande précision par des dépendances mathématiques. Compte tenu de tout ce qui précède, le problème de la localisation d’un satellite en orbite a été résolu.
Reste à résoudre le problème de la détermination de l'heure exacte dans le signal GPS du récepteur au sol. Le fait est que notre horloge dans le récepteur du signal GPS a une énorme erreur de mesure du temps par rapport à la vitesse de propagation du signal radio dans l'espace.
Pour résoudre ce problème, un signal du quatrième satellite est utilisé. Considérons le riz. 1
Si la distance A est connue d'un satellite, les coordonnées du récepteur ne peuvent pas être déterminées (il peut être situé à n'importe quel point d'une sphère de rayon A, décrite autour du satellite). Soit la distance B du récepteur du deuxième satellite connue. Dans ce cas, la définition des coordonnées est également impossible - l'objet se trouve quelque part sur le cercle (la Fig. 1 apparaît en bleu), qui est l'intersection de deux sphères. La distance C jusqu'au troisième satellite réduit l'incertitude en coordonnées à deux points (indiquée par deux points bleus en gras sur la Figure 1). Cela suffit pour déterminer sans ambiguïté les coordonnées - le fait est que sur deux points possibles de localisation du récepteur, un seul se trouve à la surface de la Terre (ou à proximité immédiate de celle-ci) et le second, faux, est situé au plus profond de la Terre ou très au-dessus de celle-ci. par la surface. Ainsi, théoriquement, pour la navigation en trois dimensions, il suffit de connaître la distance entre le récepteur et trois satellites, mais il est nécessaire de corriger l'heure dans le récepteur GPS; par conséquent, après avoir reçu un signal de quatre (ou plus) satellites (les données du cercle ne sont pas représentées sur la figure afin de ne pas encombrer la figure) le récepteur recherche le point d'intersection des sphères correspondantes. S'il n'y a pas un tel point, le processeur du récepteur commence à ajuster son horloge par la méthode d'approximations successives jusqu'à ce qu'il atteigne l'intersection de toutes les sphères en un point.
Le plus important:
1. Pour déterminer les coordonnées de l'objet, le GPS doit "voir" au moins quatre satellites.
2. Plus le récepteur "voit" de satellites, plus il détermine ses coordonnées avec précision.
Précision de la détermination des coordonnées dans le système GPS
L'avantage incontestable du GPS réside dans la grande précision de la détermination des coordonnées, indépendamment de l'emplacement de l'objet à surveiller au sol. Le fait est que, pour assurer une action mondiale, 24 satellites sont constamment en orbite, qui sont en orbite avec des déclinaisons différentes et assurent théoriquement leur visibilité partout dans le monde. Pour résoudre ce problème, il suffit qu'il y ait 18 satellites en orbite. Cependant, il a été décidé d'utiliser 24 - pour améliorer la précision de la détermination des coordonnées des satellites eux-mêmes.
La précision de la détermination des coordonnées dans le système GPS dépend de nombreux paramètres, qui dépendent à la fois des paramètres physiques (en particulier du rapport signal sur bruit dans le signal reçu, voir ci-dessous) et de la position du propriétaire du système (USA). Dans le système GPS, il existe un mode d'accès sélectif (SA - disponibilité sélective) - erreurs introduites artificiellement dans les signaux satellites pour des récepteurs GPS civils inexacts que les États-Unis ont menées lors de l'opération Desert Storm en Irak. Sur la fig. La figure 2 représente un graphique permettant de déterminer l'erreur en mode d'erreur sélective et sans erreur.
La précision de la détermination des coordonnées dépend également de:
- D'après l'état de l'atmosphère et de l'ionosphère, étant donné que la vitesse de propagation du champ électromagnétique n'est constante que dans le vide, tout milieu de propagation introduit une modification de la vitesse de propagation d'un signal radio;
- De propagation "par trajets multiples" du signal radio;
- À partir de la position relative des satellites dans le ciel, le "GDOP" (facteur géométrique réduisant la précision);
- Du traitement mathématique à bord du satellite et bien plus encore.
Compte tenu de ce qui précède, un récepteur GPS peut complètement cesser de déterminer son emplacement à proximité d'immeubles de grande hauteur à proximité (appelés puits urbains), dans une dense forêt d'épinettes et, bien entendu, à l'intérieur d'un bâtiment principal, d'un garage ou d'un hangar en métal.
Certaines entreprises de sécurité privées affirment la possibilité de protéger la vie et la santé des citoyens contre les attaques à l'aide d'un récepteur GPS + téléphone portable, mais ces utilisateurs doivent garder à l'esprit qu'ils peuvent localiser une personne à l'aide du GPS dans le bâtiment, dans la cage d'escalier, dans les transports (par exemple, où les attaques se produisent le plus souvent) est impossible.
La précision réelle de la détermination des coordonnées dans le système GPS en Russie est de 10 à 25 m. Naturellement, cette précision n’est pas maximale pour le système GPS, l’utilisation de méthodes différentielles permettant de déterminer la précision pouvant aller jusqu’à 10 cm ou moins, mais nous devons parler de ces systèmes qui sont réellement utilisés dans les départements de sécurité.
Le plus important:
- Les systèmes de navigation GPS se caractérisent par une grande précision dans la détermination des coordonnées (de l’ordre de 10 à 25 m), quelle que soit la distance de l’objet, à l’abri de la station de surveillance centrale et du temps nécessaire pour le déplacer.
- La précision de la détermination des coordonnées peut être réduite par le propriétaire du système (USA) jusqu’à l’impossibilité totale de déterminer les coordonnées.
- Le récepteur GPS peut arrêter complètement de déterminer son emplacement à proximité d'immeubles de grande hauteur à proximité (les puits de la ville), dans une dense forêt d'épinettes et, bien sûr, à l'intérieur de la structure de la capitale, d'un garage en métal ou d'un hangar.
Immunité du système GPS
Immunité aux interférences des systèmes GPS, en ce qui concerne leur utilisation dans les systèmes de sécurité. Le fait est que la puissance de l’émetteur du satellite est limitée à 50 watts pour la plage d’émission L1 et à 8 watts pour la plage L2, et la hauteur de suspension du satellite est d’environ 20 000 km.
Par conséquent, il n’est pas difficile de comprendre à quel point la densité de flux du rayonnement électromagnétique parvient à l’antenne GPS. Un simple calcul géométrique montre qu’avec une antenne de diagramme émetteur de largeur 2 et une hauteur de satellite au-dessus de la surface de la Terre de 20 000 km
le flux de rayonnement électromagnétique tombe sur un cercle de 700 km de diamètre. Cette position économise un peu la gamme de radiations GHz (avec une augmentation de la fréquence de fonctionnement, le niveau de bruit dans le milieu diminue), mais dans le même temps, une limitation est imposée à l'onde électromagnétique qui entoure un obstacle. La propagation d'une onde électromagnétique dans cette plage est presque simple.
Le prochain point souvent négligé: le récepteur GPS détermine ses coordonnées à son emplacement et les informations relatives aux coordonnées doivent être transmises à la prise de force. En règle générale, ils utilisent à cette fin des réseaux cellulaires ou un canal radio VHF, avec toutes les conséquences que cela entraîne.
Les réseaux cellulaires sont facilement supprimés, l'utilisateur est totalement dépendant de la qualité des services fournis par la société de téléphonie mobile, qui n'est généralement pas responsable de la rapidité de livraison de la notification, de la fiabilité de la communication et de la longue durée de ses obligations envers le client. Cependant, une large zone de couverture, un prix bas de l'équipement (mais pas le prix d'un transfert régulier de coordonnées d'objet) est une caractéristique attrayante d'une telle solution.
Le canal radio VHF est un canal de communication plus fiable par rapport aux réseaux cellulaires, ne nécessite pas d’intermédiaire pour le transfert de coordonnées entre l’objet de protection et le DSP, mais se caractérise par une zone de couverture beaucoup plus petite et la nécessité de disposer de sa propre ressource de fréquence, qui n’est pas toujours facile à mettre en œuvre. Dans ce cas, il n’est pas nécessaire de payer pour les échanges de trafic entre l’objet de protection et la station de surveillance.
Le plus important:
L'utilisateur doit clairement représenter suffisamment tous les pièges liés à l'utilisation de systèmes de surveillance GPS et établir de manière compétente les contrats de services fournis au client, en tenant compte de la force majeure.
GPS ou "GLONASS"
Si le GPS est un système de position mondial fabriqué aux États-Unis, GLONASS (système de navigation par satellite GLOBAL) fabriqué en URSS - Russie. À l'époque bénite, l'URSS disposait d'un système de navigation par satellite à part entière, dont les caractéristiques étaient identiques à celles du système de positionnement américain, qui était principalement utilisé à des fins militaires.
Puis, pendant les années de perestroïka, la plupart des satellites GLONASS "sont tombés" ou sont tombés en panne et, dans les pires années, au lieu de 24 satellites en orbite, il n'y en avait que 7. Pour 2006, 16 satellites sont en orbite, dont 9 seulement fonctionnent ou le seront dans un proche avenir (certains satellites étant au stade du développement complet de leurs ressources).
Au début du développement de la navigation par satellite à usage civil en Russie, des récepteurs de navigation ont été introduits sur le marché, permettant de recevoir des signaux GPS et GLONASS, ce qui est sans aucun doute correct, car le nombre de satellites potentiellement disponibles pour la réception double. Cela vous permet d’augmenter la probabilité de déterminer l’emplacement et la précision des coordonnées.
Cependant, en raison de la perte réelle du système GLONASS à la fin des années 90, seuls les récepteurs GPS sont présents sur le marché libre russe. Mais tout n'est pas aussi mauvais qu'il y paraît.
Le président russe Vladimir Poutine a identifié comme programme national prioritaire la relance du système de navigation GLONASS. En 2007, il est prévu de placer 18 satellites en orbite et, d’ici à 2010, 24 satellites, ce qui éliminera la dépendance vis-à-vis d’un sujet aussi important que la détermination globale des coordonnées ( d’application civile et ministérielle *), de la volonté des États-Unis.
(Le lecteur peut avoir l’impression qu’actuellement l’armée russe ne peut déterminer leurs coordonnées. Ce n’est pas tout à fait le cas. La navigation militaire utilise toujours des systèmes de secours, tels que des systèmes de navigation basés sur l’utilisation de radiophares, de gyroscopes mécaniques, de gyroscopes à laser annulaire, etc. l’enregistrement des modifications du champ magnétique terrestre ou d’autres principes inconnus de l’auteur. Cependant, tous ces systèmes se caractérisent par un prix élevé, une précision bien moindre pour la détermination des coordonnées (peut-être, pour les systèmes à base de prison gyroscopes laser en anneau) et une tendance à la précision de la dépendance des coordonnées de l'objet à partir du moment (l'effet de l'accumulation d'erreur).
Sur la base de ce qui précède, le niveau de navigation avec ces moyens est limité par le niveau de l'aéronef (avion, hélicoptère) et l'utilisation d'un système de navigation par satellite vous permet de suivre la position avec un coût en matériel relativement petit d'un nombre considérable d'objets, jusqu'à la position d'un soldat individuel pour plus de combat, ce qui est réalisé aux États-Unis. (création de divisions dites "informatiques", deux divisions de ce type ont déjà été créées aux Etats-Unis).
Le plus important:
- Actuellement, les récepteurs GPS dominent le marché intérieur.
- Le développeur des systèmes de navigation, ainsi que l'utilisateur, doivent envisager de partager prochainement les systèmes GPS et GLONASS.
- Lorsqu’une constellation orbitale à part entière est créée, il est nécessaire de passer au système GLONASS (bien qu’il soit effectivement possible de le faire au prix d’un récepteur GLONASS égal ou inférieur au système GPS, avec des caractéristiques techniques à peu près égales aux récepteurs des deux systèmes).
Il n’est pas dommage de dépenser de l’argent sur le fonds de stabilisation russe pour créer un système de navigation mondial véritablement compétitif, bien que ce ne soit pas le sujet de cet article.
Conclusions:
- Le système de navigation global est l’une des dernières réalisations de l’ingénierie moderne et devrait être utilisé activement dans la pratique du service public.
- Le système de navigation global n’est pas une panacée pour tous les maux.
- Une utilisation économiquement injustifiée et techniquement déraisonnable sans tenir compte des particularités du système de navigation peut conduire à un discrédit complet de cette direction aux yeux du consommateur.
L'article a été préparé conjointement avec les rédacteurs du magazine "Protection"
E. Povalyaev, S. Khutornoy
Systèmes de navigation par satellite GLONASS et GPS.
Nous vous proposons un article sur les systèmes de navigation par satellite Glonass (système mondial de navigation par satellite) et GPS (Système de positionnement global). L'article traite de la construction et du fonctionnement des systèmes, de la structure et des fonctions des équipements grand public (récepteurs), des algorithmes permettant de résoudre le problème de la navigation et des perspectives de développement des systèmes.
Depuis l'Antiquité, les voyageurs se sont demandé: comment déterminer votre position sur la Terre? Les anciens navigateurs étaient guidés par les étoiles, indiquant la direction du mouvement: connaissant la vitesse moyenne et le temps de déplacement, vous pouviez naviguer dans l'espace et déterminer la distance qui les séparait de la destination finale. Cependant, les conditions météorologiques n’étant pas toujours entre les mains des chercheurs, il n’a donc pas été difficile de dévier du cap. Avec l'avènement de la boussole tâche considérablement simplifiée. Le voyageur est déjà moins dépendant du temps.
L'ère de la radio a ouvert de nouvelles opportunités pour l'homme. Avec l'avènement des stations radar, lorsqu'il est devenu possible de mesurer les paramètres de mouvement et la position relative d'un objet à partir d'un faisceau radar réfléchi par sa surface, la question s'est posée de savoir s'il était possible de mesurer les paramètres de mouvement d'un objet à partir d'un signal rayonné. En 1957, en URSS, un groupe de scientifiques dirigé par V.A. Kotelnikova a confirmé expérimentalement la possibilité de déterminer les paramètres de mouvement d'un satellite artificiel de la Terre (AES) à partir de mesures du décalage de fréquence Doppler du signal émis par ce satellite. Mais surtout, la possibilité de résoudre le problème inverse a été établie - trouver les coordonnées du récepteur à partir du décalage Doppler mesuré du signal émis par le satellite si les paramètres de mouvement et les coordonnées de ce satellite sont connus. Lorsqu'il se déplace sur orbite, le satellite émet un signal d'une certaine fréquence, dont la valeur nominale est connue du côté de la réception (consommateur). La position du satellite à chaque instant est connue, plus précisément, elle peut être calculée sur la base des informations intégrées dans le signal du satellite. L'utilisateur, mesurant la fréquence du signal qui lui parvient, compare le standard ee et calcule ainsi le décalage de fréquence Doppler causé par le mouvement du satellite. Les mesures sont effectuées en continu, ce qui vous permet de créer une sorte de fonction de changement de fréquence Doppler. À un moment donné, la fréquence devient zéro, puis change de signe. Au moment où la fréquence Doppler est égale à zéro, le consommateur est sur la ligne, ce qui est normal pour le vecteur de mouvement du satellite. En utilisant la dépendance de la pente de la courbe de fréquence Doppler sur la distance entre le consommateur et le satellite et en mesurant le point dans le temps où la fréquence Doppler est nulle, il est possible de calculer les coordonnées du consommateur.
Ainsi, un satellite artificiel de la Terre devient une station de référence de radionavigation dont les coordonnées changent avec le temps en raison de l'orbite du satellite, mais peuvent être calculées à l'avance pour chaque instant grâce aux informations sur les éphémérides intégrées au signal de navigation par satellite.
En 1958-1959 à la Leningrad Air Force Engineering Academy (LVVIA). A.F. Mozhaisky, l'Institut d'astronomie théorique de l'Académie des sciences de l'URSS, l'Institut d'électromécanique de l'Académie des sciences de l'URSS, deux instituts de recherche marine et le NIRFI de Gorki ont mené des recherches sur le thème "Satellite", qui a ensuite servi de base à la construction du premier système russe de radionavigation par satellite "Tsikada". Et en 1963, les travaux ont commencé pour la construction de ce système. En 1967, le premier satellite russe Kosmos-192 a été lancé sur orbite. Une caractéristique des systèmes de radionavigation par satellite de première génération est l’utilisation de satellites en orbite basse et l’utilisation d’un seul signal satellite actuellement visible pour mesurer les paramètres de navigation d’un objet. Par la suite, les satellites de la Cigale ont été équipés d’un équipement de réception permettant de détecter les objets en détresse.
Parallèlement, après le lancement réussi par l'URSS du premier satellite artificiel de la Terre, aux États-Unis, au Laboratoire de physique appliquée de l'Université John Hopkins, des travaux sont en cours sur la possibilité de mesurer les paramètres du signal émis par le satellite. Les mesures servent à calculer les paramètres de mouvement des satellites par rapport au point d'observation au sol. La solution du problème inverse est une question de temps.
Sur la base de ces études, la première génération du système de radionavigation par satellite Doppler Transit a été créée aux États-Unis en 1964. Son objectif principal est l’aide à la navigation pour le lancement des sous-marins de missiles balistiques Polaris. Le père du système est le directeur du Laboratoire de physique appliquée, R. Kershner. Pour un usage commercial, le système devient disponible en 1967. Comme dans le système Cigale, dans le système Transit, les coordonnées de la source sont calculées à partir du décalage de fréquence Doppler du signal provenant de l'un des 7 satellites visibles. Les systèmes de satellites ont des orbites circulaires polaires d’une hauteur de 1100 km environ au-dessus de la surface de la Terre. La période de l’orbite des satellites de transit est de 107 minutes. La précision du calcul des coordonnées de la source dans les systèmes de la première génération dépend dans une large mesure de l’erreur de détermination de la vitesse de la source. Ainsi, si la vitesse de l'objet est déterminée avec une erreur de 0,5 m, cela entraînera à son tour une erreur dans la détermination des coordonnées d'environ 500 m. Pour un objet immobile, cette valeur diminue à 50 m.
De plus, dans ces systèmes, le fonctionnement en continu n'est pas possible. Du fait que les systèmes sont en orbite basse, le temps pendant lequel le satellite est dans le champ de vision du consommateur ne dépasse pas une heure. De plus, le temps qui s'écoule entre le passage de divers satellites dans la zone de visibilité d'un consommateur dépend de la latitude géographique à laquelle il se trouve et peut être compris entre 35 et 90 minutes. Réduire cet intervalle en augmentant le nombre de satellites est impossible car tous les satellites émettent des signaux à la même fréquence.
Par conséquent, les systèmes de navigation par satellite de deuxième génération présentent un certain nombre d'inconvénients importants. En premier lieu - le manque de précision dans la détermination des coordonnées d'objets dynamiques. L'inconvénient peut également être attribué au manque de continuité des mesures.
L'un des principaux problèmes qui se posent lors de la création de systèmes à satellites fournissant des définitions de navigation pour plusieurs satellites est la synchronisation mutuelle des signaux satellite (échelles de temps) avec la précision requise. La discordance des générateurs de satellites de référence à 10 ns entraîne une erreur dans la détermination des coordonnées du consommateur 10 à 15 m. Le deuxième problème rencontré par les développeurs lors de la création de systèmes de navigation par satellite à orbite haute était la détermination et la prédiction de haute précision des paramètres des orbites des satellites. L'équipement du récepteur, mesurant les retards des signaux de différents satellites, calcule les coordonnées du consommateur.
À cette fin, la marine américaine a mis au point un programme de lancement du satellite TIMATION-I en 1967 et, en 1969, le satellite TIMATION-II. Des oscillateurs à quartz ont été utilisés à bord de ces satellites. Parallèlement, l’armée de l’air américaine a mené simultanément son programme sur l’utilisation de signaux à large bande modulés par un code de pseudo-bruit (PRN). Les propriétés de corrélation d'un tel code permettent d'utiliser une fréquence de signal pour tous les satellites, avec une séparation de code des signaux provenant de différents satellites. Plus tard, en 1973, les deux programmes ont été combinés en un programme commun appelé "Navstar-GPS". En 1996, le déploiement du système était terminé. Il y a actuellement 28 satellites actifs disponibles.
En URSS, les essais en vol du système de navigation par satellite à haute orbite Glonass ont débuté en 1982 avec le lancement du satellite Cosmos-1413. Le principal développeur et créateur du système dans son ensemble et dans le segment spatial est le NPO de la mécanique appliquée (Krasnoyarsk) et le vaisseau spatial de navigation est le logiciel Polet (Omsk). Le développeur principal des systèmes radio est RNIIKP; L’Institut russe de radionavigation et d’heure a été identifié comme responsable de la création d’un complexe de temps, d’un système de synchronisation et d’un équipement de navigation grand public.
Système de radionavigation par satellite (SRNSS) du réseau Glonass
Le système Glonass est conçu pour la navigation opérationnelle globale d’objets en mouvement. SRNSS développé par ordre du ministère de la défense. Dans sa structure, Glonass, ainsi que le GPS, est considéré comme un système à double action, c’est-à-dire qu’il peut être utilisé à des fins militaires et civiles.
Le système dans son ensemble comprend trois parties fonctionnelles (dans la littérature professionnelle, ces parties sont appelées des segments) (Fig. 1).
Figure 1. Segments de systèmes de navigation en orbite haute, Glonass et GPS
le segment spatial, qui comprend le groupe orbital de satellites artificiels de la Terre (en d’autres termes, les engins spatiaux de navigation);
segment de commande, complexe de commande au sol (NKU) du groupe orbital d’engins spatiaux;
utilisateurs d'équipement du système.
Parmi ces trois pièces, celle-ci, l’équipement utilisateur, est la plus nombreuse. Le système Glonass est sans interrogation, le nombre d'utilisateurs du système n'a donc pas d'importance. En plus de la fonction principale - définitions de navigation - le système permet une synchronisation très précise des normes de fréquence et de temps sur des objets au sol distants et un référencement géodésique mutuel. En outre, il peut être utilisé pour déterminer l’orientation d’un objet à partir de mesures effectuées à partir de quatre récepteurs de signaux de satellites de navigation.
Dans le système Glonass, les engins spatiaux de navigation (NKA) naviguant sur une orbite géostationnaire circulaire à une altitude d’environ 19 100 km servent de station de référence de radionavigation à une altitude d’environ 19 100 km (Fig. 2). La période orbitale d'un satellite autour de la Terre est en moyenne de 11 heures et 45 minutes. La durée de fonctionnement du satellite est d'environ 5 ans. Pendant ce temps, les paramètres de son orbite ne doivent pas différer des valeurs nominales de plus de 5%. Le satellite lui-même est un conteneur hermétique de 1,35 m de diamètre et de 7,84 m de long dans lequel sont logés divers types d’équipements. Tous les systèmes sont alimentés par des panneaux solaires. La masse totale du satellite - 1415 kg. L'équipement embarqué comprend: un émetteur de navigation embarqué, un chronomètre (horloge), un système de contrôle embarqué, un système d'orientation et de stabilisation, etc.
Figure 2. Le segment spatial des systèmes GLONASS et GPS
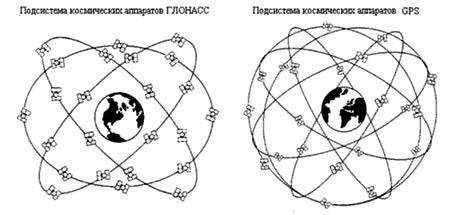
Figure 3. Segment du complexe de contrôle au sol du système Glonass
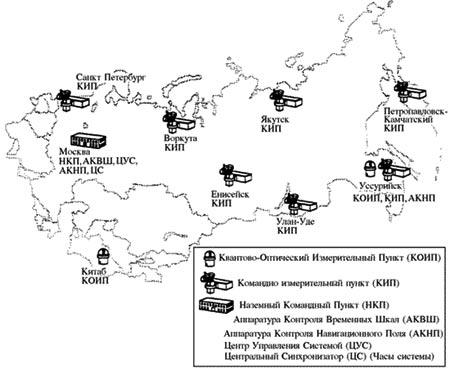
Figure 4. Segment complexe de commande GPS au sol
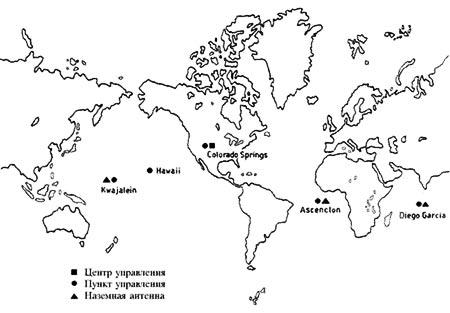
Le segment complexe de commande au sol GLONASS remplit les fonctions suivantes:
éphémérides et support temps-fréquence;
surveillance du champ de radionavigation;
surveillance radio télémétrie;
commande et programme de contrôle radio NKA.
Pour synchroniser les échelles de temps de divers satellites avec la précision requise à bord du NKA, des étalons de fréquence au césium avec une instabilité relative de l'ordre de 10 à 13 sont utilisés. Le complexe de contrôle au sol utilise le standard hydrogène avec une instabilité relative de 10-14. De plus, la NKU comprend des moyens pour corriger les échelles de temps des satellites par rapport à l'échelle de référence avec une erreur de 3√5 ns.
Le segment sol fournit un support de satellite éphéméride. Cela signifie que les paramètres du mouvement des satellites sont déterminés sur la Terre et que les valeurs de ces paramètres sont prédites pour une période de temps prédéterminée. Les paramètres et leurs prévisions sont consignés dans le message de navigation transmis par le satellite lors de la transmission du signal de navigation. Cela inclut également les corrections temps-fréquence de l’échelle de temps du satellite par rapport à l’heure du système. La mesure et la prévision des paramètres du mouvement de la NKA sont effectuées dans le centre balistique du système en fonction des résultats des mesures de trajectoire de la distance au satellite et de sa vitesse radiale.
Système de navigation GPS par satellite
Les fonctionnalités du système GPS américain sont similaires à celles du système domestique Glonass. Son objectif principal est de déterminer avec précision les coordonnées du consommateur, les composants du vecteur vitesse et de les relier à l'échelle de temps du système. Comme pour les systèmes domestiques, le système GPS a été développé pour le département américain de la Défense et est sous son contrôle. Selon le document de contrôle d'interface, les principaux développeurs du système sont:
pour le segment spatial - Division spatiale internationale de Rockwell, Division spatiale Martin Marietta Astro;
secteur de la gestion - IBM, Federal System Company;
par segment de consommateurs - Rockwell International, Collins Avio-nics & Communication Division.
Comme le système Glonass, le GPS comprend un segment spatial, un complexe de mesure et de contrôle basé au sol et un segment consommateur.
Comme mentionné ci-dessus, la constellation orbitale GPS comprend 28 engins spatiaux de navigation. Tous sont en orbite circulaire avec une période de révolution autour de la Terre égale à 12 heures. La hauteur d’orbite de chaque satellite est d’environ 20 000 km. Les ANC du système GPS ont subi un certain nombre d’améliorations qui ont affecté leurs performances en général. Dans l'onglet. 1 montre les caractéristiques brèves du vaisseau spatial utilisé dans le système.
Tableau 1. Caractéristiques des engins spatiaux utilisés dans le système GPS
|
Masse en orbite |
Puissance des sources d'énergie, W |
Durée de vie estimée |
Année de lancement du premier NCA |
|
Tableau 2. Caractéristiques comparatives des systèmes GLONASS et GPS
|
Indicateur | ||
|
Nombre d'engins spatiaux dans le groupe orbital complet | ||
|
Le nombre de plans orbitaux | ||
|
Le nombre de vaisseaux spatiaux dans chaque plan | ||
|
Inclinaison en orbite | ||
|
Hauteur en orbite, km | ||
|
Période de rotation du satellite |
11 h 15 min. 44 s |
11 h 58 min 00 s |
|
Système de coordonnées | ||
|
Masse de navigation par satellite, kg | ||
|
Énergie solaire, W | ||
|
Le terme d'existence active, années | ||
|
Moyens de mise en orbite des engins spatiaux |
"Proton-K / DM" | |
|
Le nombre d'engins spatiaux affichés par lancement | ||
|
Cosmodrome |
Baïkonour (Kazakhstan) |
Cap Canaveral (Cap Canaveral) |
|
Temps de référence | ||
|
Méthode d'accès | ||
|
Fréquence porteuse: L1 L2 |
1598.06251604.25 7/9 L1 |
1575.42 60/77 L1 |
|
Polarisation |
Côté droit |
Côté droit |
|
Séquence de pseudo-bruit de type |
séquence m |
code d'or |
|
Nombre de points de code: C / A P | ||
|
Taux de codage, Mbps: C / A P | ||
|
Le niveau de brouillage interne du système, en dB | ||
|
Structure du message de navigation |
||
|
Taux en bauds, bps | ||
|
Type de modulation |
BPSK (Manchester) | |
|
Longueur de la supertrame, min. |
2,5 (5 images) |
12,5 (25 images) |
|
Longueur du cadre, avec |
30 (15 lignes) |
30 (5 lignes) |
|
Longueur de ligne, avec | ||
Lors de la conception du système dans son ensemble et de l'ANC en particulier, une grande attention est accordée aux questions de fonctionnement autonome. Ainsi, l’engin spatial de la première génération (bloc I) assurait le fonctionnement normal du système (c’est-à-dire sans erreurs significatives dans la détermination des coordonnées) sans intervention du segment de contrôle pendant 3 à 4 jours. Dans les dispositifs du bloc II, cette période a été étendue à 14 jours. Dans la nouvelle modification de la NKA, le bloc IIR permet un fonctionnement autonome pendant 180 jours sans régler les paramètres orbitaux depuis le sol, en utilisant uniquement le complexe autonome de synchronisation mutuelle des satellites. Les dispositifs du Block-IIF sont censés être utilisés à la place du Block-IIR utilisé.
Structure du système de signalisation radio de navigation Glonass
Le système Glonass utilise des signaux à séparation de fréquence (FDMA), émis par chaque satellite - deux signaux déphasés. La fréquence du premier signal se situe dans la plage L1 ~ 1600 MHz et la fréquence du second signal dans la plage L2 ~ 1250 MHz. Les valeurs nominales des fréquences de fonctionnement des signaux radio émis dans les bandes L1 et L2 sont définies par l'expression:
f k1 = f 1 + kf 1 f k2 = f 2 + kf 2 k = 0,1, ..., 24, (1)
où k = 0,1, ..., 24 - nombres de lettres (canaux) des fréquences de fonctionnement des satellites;
f 1 = 1602 MHz; f 1 = 9/16 = 0,5625 MHz; f 2 = 1246 MHz; f 2 = 7/16 = 0,4375 MHz.
Pour chaque satellite, les fréquences de fonctionnement des signaux dans la plage L1 et L2 sont cohérentes et sont formées à partir d’une référence de fréquence unique. Le rapport des fréquences de fonctionnement de la porteuse de chaque satellite:
f k1 / f k2 = 7/9.
La fréquence nominale du générateur de bord, du point de vue de l'observateur situé à la surface de la Terre, est de 5,0 MHz.
Dans la bande L1, chaque satellite du système Glonass émet 2 porteuses à la même fréquence, déphasées de 90 ° l'une par rapport à l'autre (Fig. 5).
Figure 5. Diagramme vectoriel des signaux de porteuse des systèmes GLONASS et GPS
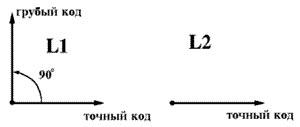
L'un des transporteurs subit une manipulation de phase à 180º. Le signal de modulation est obtenu en ajoutant trois signaux binaires modulo 2 (Fig. 6):
un code de télémétrie grossière transmis à une vitesse de 511 Kbps (Fig. 6c);
séquences de données de navigation transmises à 50 bit / s (figure 6a);
oscillations de méandres transmises à une vitesse de 100 bps (Fig. 6b).
Figure 6. Structure du signal GLONASS
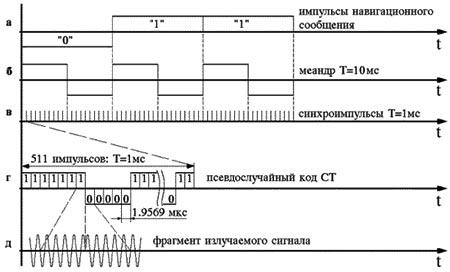
Le signal dans la plage L1 (similaire au code C / A du GPS) est disponible pour tous les consommateurs dans le champ de vision de l'engin spatial. Le signal dans la gamme L2 est destiné aux besoins militaires et sa structure n’est pas divulguée.
Composition et structure des messages de navigation des satellites Glonass
Le message de navigation est formé sous la forme de lignes suivies en continu, toutes les 2 secondes. Dans la première partie de la ligne (intervalle de 1,7 s), les données de navigation sont transmises, et dans la seconde (0,3 s) - l’horodatage. Il s'agit d'une séquence pseudo-aléatoire raccourcie composée de 30 symboles avec une fréquence d'horloge de 100 bps.
Les consommateurs ont besoin des messages de navigation des satellites Glonass pour la définition de la navigation et la planification de sessions de communication avec les satellites. Selon son contenu, les messages de navigation sont divisés en informations opérationnelles et non opérationnelles.
Les informations opérationnelles font référence au satellite à partir du signal sur lequel il a été reçu. Les informations opérationnelles comprennent:
horodatage;
différence relative entre la fréquence porteuse du satellite et la valeur nominale;
informations sur les éphémérides.
Le temps de liaison des informations éphémérides et les corrections fréquence-temps, multipliées par une demi-heure à compter du début de la journée, permettent de déterminer avec précision les coordonnées géographiques et la vitesse du satellite.
Les informations non opérationnelles contiennent un almanach, notamment:
données sur l'état de tous les satellites du système;
décalage d'échelle de temps satellite par rapport à l'échelle du système;
paramètres d'orbite de tous les satellites du système;
modification de l'échelle de temps du système Glonass.
Le choix de la "constellation" optimale de l'engin spatial et la prédiction du décalage Doppler de la fréquence porteuse sont fournis par l'analyse de l'almanach du système.
Les messages de navigation des satellites du système Glonass sont structurés en supertrames d’une durée de 2,5 minutes. Une supertrame est composée de cinq images d’une durée de 30 s. Chaque image contient 15 lignes d'une durée de 2 secondes. À partir de 2 secondes, les dernières 0,3 secondes prennent l'horodatage. Le reste de la ligne contient 85 caractères d’informations numériques transmises à 50 Hz.
Chaque trame contient la totalité des informations opérationnelles et une partie de l’almanach du système. Almanach complet contenu dans la supertrame. Dans le même temps, les informations de la supertrame contenues dans les lignes 1√4 font référence au satellite dont elles proviennent (la partie opérationnelle) et ne changent pas dans la supertrame.
Structure radio de navigation GPS
Le GPS utilise la division de code (CDMA), de sorte que tous les satellites émettent des signaux avec la même fréquence. Chaque satellite GPS émet deux signaux déphasés. La fréquence du premier signal est L1 = 1575,42 MHz et le second - L2 = 1227,6 MHz. Le signal de fréquence porteuse L1 est modulé par deux séquences binaires, chacune d'elles étant formée par la synthèse modulo-2 du code de télémétrie et du système transmis et des données de navigation générées à 50 bit / s. A la fréquence L1, deux composantes en quadrature sont transmises, manipulées en deux phases par des séquences binaires. La première séquence est la somme modulo 2 du code de télémétrie exact P ou du code Y secret et des données de navigation. La deuxième séquence est également une somme modulo 2 du code grossier C / A (ouvert) et de la même séquence de données de navigation.
Le signal radio sur la fréquence L2 est manipulé en deux phases par une seule des deux séquences précédemment considérées. La sélection de la séquence de modulation est effectuée par une commande de la Terre.
Chaque satellite utilise les codes de distance C / A et P (Y) qui lui sont propres, ce qui permet de séparer les signaux du satellite. Lors de la formation du code de distance exacte P (Y), des horodatages satellites sont générés simultanément.
Composition et structure des messages de navigation des satellites GPS
La division structurelle des informations de navigation des satellites GPS est réalisée en supertrames, cadres, sous-cadres et mots. Une supertrame est composée de 25 images et prend 750 s (12,5 min). Une trame est transmise pendant 30 s et sa taille est de 1500 bits. La trame est divisée en 5 sous-trames de 300 bits chacune et transmise pendant un intervalle de 6 s. Le début de chaque sous-trame indique l'horodatage correspondant au début / à la fin du prochain intervalle de temps du système GPS de 6 secondes. Podcat est composé de 10 mots de 30 bits. Dans chaque mot, les 6 bits les moins significatifs sont les bits de contrôle.
Dans les première, deuxième et troisième sous-trames, les données sur les paramètres de correction de l'horloge et les données sur les éphémérides du KA avec lequel la connexion est établie sont transmises. Le contenu et la structure de ces sous-trames restent inchangés sur toutes les pages de la supertrame. Les quatrième et cinquième sous-trames contiennent des informations sur la configuration et l'état de tous les systèmes d'engins spatiaux, des almanachs d'engin spatial, des messages spéciaux, des paramètres décrivant la relation entre l'heure GPS et l'heure UTC, etc.
Algorithmes de réception et de mesure de paramètres de signaux de radionavigation par satellite
Le segment des consommateurs de systèmes GPS et GLONASS comprend les récepteurs de signaux satellites. En mesurant les paramètres de ces signaux, le problème de navigation est résolu. Le récepteur peut être divisé en trois parties fonctionnelles:
partie radiofréquence;
corrélateur numérique;
processeur
À la sortie de l’antenne alimenteur (antenne), le signal passe dans la partie radiofréquence (Fig. 7). L'objectif principal de cette partie est d'amplifier le signal d'entrée, le filtrage, la conversion de fréquence et la conversion analogique-numérique. De plus, la partie radiofréquence du récepteur reçoit la fréquence d'horloge de la partie numérique du récepteur. À partir de la sortie de la partie radiofréquence, des échantillons numériques du signal d'entrée sont envoyés à l'entrée d'un corrélateur numérique.
Figure 7. Structure du récepteur généralisée
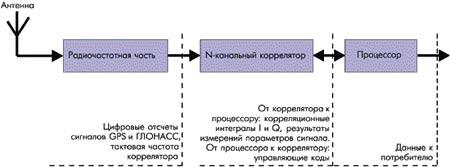
Dans le corrélateur, le spectre du signal est transféré à la fréquence "zéro". Ceci est effectué en multipliant le signal d'entrée du corrélateur par l'oscillation harmonique de référence dans les canaux en phase et en quadrature. Ensuite, le résultat de la multiplication passe le traitement de corrélation en le multipliant par le code de mesure de référence de référence et en accumulant la période du code de mesure de distance. En conséquence, nous obtenons les intégrales de corrélation I et Q. Les intégrales de corrélation sont introduites dans le processeur pour un traitement ultérieur et le verrouillage des boucles PLL (boucle à verrouillage de phase) et des CVD (circuits de suivi de retard). Les mesures des paramètres du signal dans le récepteur ne sont pas effectuées directement à partir du signal d'entrée, mais à partir de sa copie exacte formée par les systèmes PLL et CVD. Les intégrales de corrélation I et Q nous permettent d’estimer le degré de "similarité" (corrélation) des signaux de référence et d’entrée. En plus de la formation des intégrales I et Q, le corrélateur a pour tâche de former un signal de référence, conformément aux actions de contrôle (codes de contrôle) provenant du processeur. De plus, dans certains récepteurs, le corrélateur génère les mesures nécessaires des signaux de référence et les transmet au processeur pour un traitement ultérieur. En même temps, étant donné que les signaux de référence dans le corrélateur sont générés à partir des codes de commande reçus du processeur, les mesures nécessaires des signaux de référence peuvent être effectuées directement dans le processeur, en traitant les codes de commande en conséquence, ce qui est fait dans de nombreux récepteurs modernes.
Quels paramètres de signal le corrélateur (processeur) mesure-t-il?
La plage de mesure radio est caractérisée par le temps de propagation du signal de l'objet à mesurer au point de mesure. Dans les systèmes de navigation GPS / GLONASS, l'émission de signaux est synchronisée avec l'échelle temporelle du système, plus précisément avec l'échelle temporelle du satellite émettant ce signal. En même temps, le consommateur dispose d’informations sur la différence entre l’échelle de temps du satellite et celle du système. Les informations numériques transmises par le satellite vous permettent de définir le moment d’émission d’un certain fragment du signal (horodatage) par le satellite en heure système. Le moment de réception de ce fragment est déterminé par l’échelle de temps du récepteur. L'échelle de temps du récepteur (consommateur) est formée à l'aide d'étalons de fréquence à quartz; il existe donc un "écart" constant de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. La différence entre le moment de réception d'un fragment de signal, compté sur l'échelle de temps du récepteur, et le moment de rayonnement par son satellite, compté sur l'échelle du satellite, multipliée par la vitesse de la lumière, est appelée pseudorange. Pourquoi pseudorange? Parce qu'il diffère de la plage réelle d'un montant égal au produit de la vitesse de la lumière par le "départ" de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. Lors de la résolution d'un problème de navigation, ce paramètre est déterminé avec les coordonnées du consommateur (récepteur).
Les intégrales de corrélation formées dans le corrélateur permettent de suivre la modulation du signal satellite avec des symboles d'information et de calculer l'estampille temporelle dans le signal d'entrée. Les horodatages suivent avec une fréquence de 6 s pour le GPS et de 2 s pour le GLONASS et forment une sorte d'échelle de 6 (2) secondes. Dans les limites d'une division de cette échelle, les périodes du code de télémétrie forment une échelle de 1 ms. Une milliseconde est divisée à son tour en éléments individuels (puces, dans la terminologie GPS): pour le GPS-1023, pour le GLONASS-511. Ainsi, les éléments du code de télémétrie vous permettent de déterminer la distance au satellite avec une erreur de ~ 300 m. il est nécessaire de connaître la phase du générateur de code de télémétrie. Les schémas de construction des générateurs de référence du corrélateur permettent de déterminer sa phase avec une précision de 0,01 période, précision de la détermination de la pseudorange de 3 m
Sur la base des mesures des paramètres de l'oscillation harmonique de référence générée par le système PLL, déterminez la fréquence et la phase de l'oscillation de la porteuse du satellite. Son départ par rapport à la valeur nominale donnera le décalage de fréquence Doppler, qui sert à estimer la vitesse de l'utilisateur par rapport au satellite. De plus, les mesures de phase de la porteuse permettent de spécifier la distance au satellite avec une erreur de plusieurs mm.
Détermination des coordonnées du consommateur
Pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance entre le consommateur et chaque satellite visible. Pour que le consommateur puisse déterminer les coordonnées des satellites, les signaux de navigation émis par ceux-ci sont modélisés par des messages concernant les paramètres de leur déplacement. L'équipement du consommateur comprend une sélection de ces messages et la détermination des coordonnées des satellites au bon moment.
Les coordonnées et les composantes du vecteur vitesse changent très rapidement. Les messages concernant les paramètres de mouvement du satellite contiennent donc des informations non pas sur leurs coordonnées ni sur les composantes du vecteur vitesse, mais sur les paramètres d’un modèle donné qui se rapproche de la trajectoire du mouvement de l’engin spatial sur une période suffisamment longue (environ 30 minutes). Les paramètres du modèle d'approximation varient assez lentement et peuvent être considérés comme constants pendant l'intervalle d'approximation.
Les paramètres du modèle approximatif sont inclus dans les messages de navigation par satellite. Le système GPS utilise le modèle de mouvement Kepler avec des éléments osculants. Dans ce cas, la trajectoire du vol de l'engin spatial est divisée en zones d'approximation d'une durée d'une heure. Au centre de chaque section, un point temporel nodal est défini, dont la valeur est communiquée au consommateur d'informations de navigation. De plus, le consommateur est informé des paramètres du modèle d'éléments osculants à un instant nodal, ainsi que des paramètres de fonctions approchant les modifications des paramètres du modèle d'éléments osculants dans le temps, l'élément nodal précédent et celui qui le suit.
Dans l'équipement du consommateur, l'intervalle de temps entre le moment pour lequel la position du satellite doit être déterminée et le moment nodal est distingué. Ensuite, en utilisant les fonctions d’approximation et leurs paramètres extraits du message de navigation, les valeurs des paramètres du modèle d’éléments calculateurs sont calculées au moment voulu. À la dernière étape, les coordonnées et les composantes du vecteur vitesse satellite sont déterminées à l'aide des formules du modèle de Keplerian habituelles.
Dans le système Glonass, des modèles de mouvement différentiel sont utilisés pour déterminer la position exacte du satellite. Dans ces modèles, les coordonnées et les composantes du vecteur vitesse satellite sont déterminées par intégration numérique des équations différentielles du mouvement de l'engin spatial, en tenant compte du nombre fini d'efforts agissant sur l'engin spatial. Les conditions d'intégration initiales sont spécifiées à un instant nodal, situé au milieu de l'intervalle d'approximation.
Comme mentionné ci-dessus, pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance entre le consommateur et chaque satellite visible, laquelle est déterminée dans le récepteur de navigation avec une précision d'environ 1 m. . 8
Figure 8. Détermination des coordonnées du consommateur
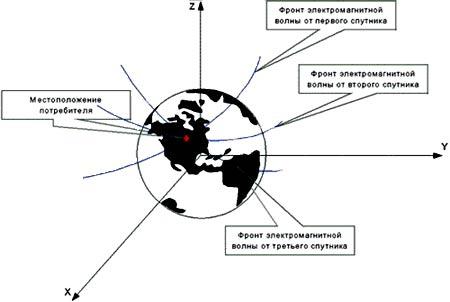
Chaque satellite (Fig. 8) peut être représenté comme un émetteur de points. Dans ce cas, le front de l'onde électromagnétique sera sphérique. Le point d'intersection des deux sphères sera celui dans lequel se trouve le consommateur.
La hauteur des orbites des satellites est d'environ 20 000 km. Par conséquent, le second point d'intersection des cercles peut être rejeté en raison d'informations a priori, car il est loin dans l'espace.
Mode différentiel
Les systèmes de navigation par satellite permettent au consommateur d’obtenir des coordonnées d’une précision d’environ 10 à 15 m. L’une des méthodes principales pour améliorer la précision de la détermination de la position d’un objet repose sur l’application du principe des mesures de navigation différentielles connu en radionavigation.
Le mode différentiel DGPS (GPS différentiel) vous permet de régler les coordonnées avec une précision de 3 m dans un environnement de navigation dynamique et jusqu'à 1 m en conditions stationnaires. Le mode différentiel est mis en œuvre à l'aide d'un récepteur GPS de contrôle, appelé station de référence. Il est situé à un point avec des coordonnées connues, dans la même zone que le récepteur GPS principal. En comparant les coordonnées connues (obtenues à la suite d'un levé géodésique de précision) avec les valeurs mesurées, la station de référence calcule les corrections qui sont transmises aux consommateurs par voie hertzienne dans un format prédéterminé.
L'équipement du consommateur reçoit des corrections différentielles de la station de référence et en tient compte lors de la détermination de l'emplacement du consommateur.
Les résultats obtenus en utilisant la méthode différentielle dépendent en grande partie de la distance entre l'objet et la station de référence. L'utilisation de cette méthode est particulièrement efficace lorsque des erreurs systématiques dues à des causes externes (par rapport au récepteur) prévalent. Selon les données expérimentales, il est recommandé que la station de référence ne se trouve pas à plus de 500 km de l'objet.
Il existe actuellement de nombreux systèmes différentiels étendus, régionaux et locaux.
Des systèmes tels que l’Américain WAAS, l’European EGNOS et le MSAS japonais méritent d’être signalés comme des écarts importants. Ces systèmes utilisent des satellites géostationnaires pour transmettre des corrections à tous les consommateurs de leur zone de couverture.
Les systèmes régionaux sont conçus pour assurer la navigation dans certaines zones de la surface de la Terre. Généralement, les systèmes régionaux sont utilisés dans les grandes villes, sur les autoroutes et les rivières navigables, dans les ports et le long des côtes des mers et des océans. Le diamètre de la zone de travail du système régional est généralement compris entre 500 et 2000 km. Il peut avoir une ou plusieurs stations de référence.
Les systèmes locaux ont une portée maximale de 50 à 220 km. Ceux-ci incluent généralement une station de base. Les systèmes locaux sont généralement divisés en fonction de la méthode d’application utilisée: stations différentielles locales marines, aéronautiques et géodésiques.
Le développement de la navigation par satellite
La modernisation des systèmes à satellites GPS et Glonass vise principalement à améliorer la précision des définitions de navigation, à améliorer le service fourni aux utilisateurs, à augmenter la durée de vie et la fiabilité des équipements embarqués sur satellite, à améliorer la compatibilité avec d’autres systèmes radio et à développer des sous-systèmes différentiels. La direction générale de développement des systèmes GPS et Glonass est la même, mais la dynamique et les résultats obtenus sont très différents.
L’amélioration du système GLONASS devrait être réalisée sur la base des satellites de nouvelle génération GLONASS-M. Ce satellite aura une durée de vie accrue et émettra un signal de navigation dans la gamme L2 pour les applications civiles.
Une décision similaire a été prise aux États-Unis, où le 5 janvier 1999, il avait été annoncé que 400 millions de dollars seraient affectés à la modernisation du système GPS associé à la transmission du code C / A sur la fréquence L2 (1222,7 MHz) et à l’introduction de la troisième porteuse L3 (1176, 45 MHz) sur les satellites qui seront lancés à partir de 2005. Le signal sur la fréquence L2 est destiné à être utilisé à des fins civiles sans lien direct avec le danger pour la vie humaine. Il est proposé de commencer la mise en œuvre de cette décision en 2003. Il a été décidé d’utiliser le troisième signal civil sur la fréquence L3 pour les besoins de l’aviation civile.
Littérature
Systèmes radio. Ed. Kazarinova Yu.M. M.: École supérieure, 1990.
Yu.A. Soloviev Systèmes de navigation par satellite. M.: Eco-Trendz, 2000.
Système mondial de radionavigation par satellite GLONASS / Ed. V.N. Harisova, A.I. Perova, V.A. Boldin. M.: IPRZHR, 1998.
Lipkin I.A. Systèmes de navigation par satellite. M.: University book, 2001.
Système mondial de navigation par satellite GLONASS. Document de contrôle d'interface. M.: KNITS VKS, 1995.
Document de contrôle d'interface: Interfaces utilisateur du segment spatial / navigation NAVSTAR GPS (ICD-GPS-200).Rockwell Int. Corp. 1987