Продукція ванні кп. Принципи роботи GPS-навігатора
Останні роки характеризуються широкомасштабним впровадженням супутникових навігаційних технологійі апаратури супутникової навігаціїпрактично у всіх областях діяльності. Обов'язковість застосування апаратури ГЛОНАСС або ГЛОНАСС / GPS при здійсненні відповідних видів транспортної діяльності, включаючи наявність обов'язкових вимог до самої апаратури, поставили в розряд вельми актуальних проблему встановлення форм оцінки її відповідності встановленим вимогам. Однак рішення цієї проблеми часто буває пов'язане з певними труднощами. Аналізу ряду аспектів даної проблеми присвячена ця стаття.
Прикладами деяких пристроїв з довільним виходом-карданом є опорні гіроскопи орієнтації, використовувані для визначення або вимірювання висоти тону, ролика, центр ваги ротора може перебувати в фіксованому положенні. Деякі гіроскопи мають механічні еквіваленти, заміщені одним або декількома елементами, наприклад, що обертається ротор може бути підвішений в рідини, замість того, щоб шарнірно встановлюватися в карданів. У деяких особливих випадках зовнішній карданний шарнір може бути опущений так, щоб ротор мав дві ступені свободи.
Найбільш масове застосування апаратури супутникової навігації спостерігається в транспортному комплексі та, особливо, на наземному транспорті. Навігаційні пристрої, що встановлюються на автомобілі різного класу, широко використовуються в системах моніторингу та диспетчеризації перевезень пасажирів, спеціальних і небезпечних вантажів. Передбачається застосування цієї апаратури в системі екстреного реагування при аваріях (ЕРА-ГЛОНАСС), а також в системі справляння плати за проїзд по автодорогах федерального значення великовантажного транспорту з дозволеною максимальною масою понад 12 тонн. Навігаційні пристрої використовуються також в системах контролю режимів праці та відпочинку водіїв (системи тахографа контролю); страхової телематики ( «розумне» страхування) і ін.
По суті, гіроскоп - це вершина, об'єднана з парою карданів, Топи були винайдені в багатьох різних цивілізаціях, включаючи класичну Грецію, Рим і Китай. У відповідній системі відліку він може бути визначений як зміна першого кута Ейлера, іншими словами, якщо вісь обертання тіла сама обертається навколо другої осі, це тіло, як кажуть, прецессирует навколо другої осі. Рух, в якому змінюється другий кут Ейлера, називається нутацією, у фізиці існують два типи прецесії, без крутного моменту і з обертовим рухом.
В астрономії прецесія відноситься до будь-якого з декількох змін в параметрах обертальних або орбітальних астрофізичних тел. Важливим прикладом є зміна орієнтації осі обертання Землі. Без прецесії без крутного моменту мається на увазі, що до тіла не постачається жодного моменту. При безмоментной прецесії імпульс є константою. Те, що робить це можливим, - це момент інерції, а точніше. Інерційна матриця складається з моментів інерції тіла, обчисленого по осях координат. Якщо об'єкт асиметричний щодо своєї осі обертання.
В значній мірі навігаційний бум на транспорті обумовлений тим, що досить суттєва частина ринку транспортних перевезень, що базуються на використанні апаратури або ГЛОНАСС / GPS, стала державно регульованою. Так, в який вийшов в 2008 році постанові уряду РФ N641 були визначені види транспортних засобів, що підлягають обов'язковому оснащенню апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS.
В результаті компонента швидкостей тіла навколо кожної осі буде змінюватися назад з кожним моментом інерції осі. Прецессией, викликаної моментом, є явище, при якому вісь обертового об'єкта описує конус в просторі, коли до нього додається крутний момент. Це явище видно в вертлюге. Якщо швидкість обертання і величина зовнішнього крутного моменту постійні, вісь обертання буде рухатися під прямим кутом до напрямку, яке буде інтуїтивно обумовлено зовнішнім крутним моментом.
У разі іграшкового верху його вага діє вниз від його центру мас, і ці дві протилежні сили створюють крутний момент, який змушує вершину прецессировать. Пристрій, зображене праворуч, монтується на карнизі, зсередини назовні є три осі обертання, маточина колеса, вісь кардана і вертикальний шарнір. Щоб розрізняти дві осі, обертання навколо маточини колеса буде називатися обертовим, а обертання навколо осі кардана буде називатися хитавицею. Поле навігації включає в себе чотири категорії: наземну навігацію, морську навігацію, аеронавігаційну навігацію.
Згодом обов'язковість оснащення транспортних засобів апаратурою ГЛОНАСС при здійсненні перевезень пасажирів, спеціальних і небезпечних вантажів де-юре була закріплена Федеральним законом «Про навігаційної діяльності».
Вимоги обов'язкового оснащення транспортних засобів апаратурою супутникової навігації закріплено також в нормативних правових актах про безпеку наземного (автомобільного і залізничного) і морського транспорту (технічні регламенти - національні та Митного союзу), що визначають порядок випуску в обіг транспортних засобів різного призначення. Крім того, вони знайшли відображення в нормативних правових актах, що встановлюють вимоги до вже експлуатується транспортним засобам. При цьому в Технічному регламенті Митного союзу «Про безпеку колісних транспортних засобів», крім норм оснащеності транспортних засобів супутникової навігаційної апаратурою різного призначення, встановлені і основні вимоги до самої апаратури.
Це також термін мистецтва, який використовується для спеціалізованих знань, використовуваних навігаторами для виконання навігаційних завдань, всі навігаційні методи включають розміщення положення навігаторів в порівнянні з відомими місцями розташування або візерунками. Навігація, в деякому сенсі, може ставитися до будь-якого вмінню або дослідженню, яке включає визначення положення і напрямки. У цьому сенсі навігація включає в себе орієнтування і пішохідну навігацію, для інформації про різні навігаційних стратегіях, які люди використовують, відвідайте навігацію людини.
Зазначені норми і вимоги передбачаються і в національному технічному регламенті, проект постанови уряду РФ про внесення змін до якого проходить встановлені процедури узгодження із зацікавленими федеральними органами виконавчої влади. У більш розгорнутому вигляді вимоги до апаратури супутникової навігації відображені в наказі Мінтрансу Росії від 31 липня 2012 № 285.
В європейський середньовічний період навігація вважалася частиною набору семи механічних мистецтв, ранні тихоокеанські полінезійці використовували рух зірок, погоду, положення певних видів дикої природи або розмір хвиль, щоб знайти шлях від одного острова до іншого, Морське судноплавство з використанням наукових приладів, Таких як астролябія моряків, вперше відбулося в Середземному морі в середні століття, вдосконалення цього навігаційного інструменту приписується португальським мореплавцям під час ранніх португальських відкриттів в епоху відкриття.
Обов'язковість застосування апаратури ГЛОНАСС або ГЛОНАСС / GPS при здійсненні відповідних видів транспортної діяльності, включаючи наявність обов'язкових вимог до самої апаратури, поставили в розряд вельми актуальних проблему встановлення форм оцінки її відповідності встановленим вимогам. Однак рішення цієї проблеми часто буває пов'язане з певними труднощами.
Тринідад відплив на схід від Філіппін, намагаючись знайти шлях назад в Америку. Грубо кажучи, широта місця на Землі - це його кутова відстань на північ або південь від екватора, широта зазвичай виражається в градусах від 0 ° на екваторі до 90 ° на північному і південному полюсах. Висота Поларіс в градусах над горизонтом - це широта спостерігача, подібна широті, довгота місця на Землі - це кутова відстань на схід чи захід від простого меридіана або Гринвічем меридіана. Довгота зазвичай виражається в градусах від 0 ° до Грінвічському меридіані до 180 ° на схід і на захід, наприклад, Сідней має довжину близько 151 ° східної довготи.
Однією з функціональних характеристик апаратури супутникової навігації є точність визначення координат місця розташування і швидкості руху об'єкта навігації, на якому вона встановлена. Виходячи з цього, всі складнощі даної проблеми у вітчизняній практиці застосування навігаційної апаратури традиційно складалися в коректному вирішенні питання: якою мірою до цієї апаратури при оцінці її відповідності встановленим вимогам можна застосувати положення і норми національного законодавства про забезпечення єдності вимірювань. Простіше кажучи, чи зараховувати цю апаратуру до класу технічних пристроїв, Є засобами вимірювань, чи ні?
Нью-Йорк має довготу 74 ° на захід, протягом більшої частини історії моряки щосили намагалися визначити довготу. Компас - компас - інструмент, який використовується для навігації і орієнтації, який показує напрямок щодо географічних основних напрямків або точок. Як правило, названа компасна троянда показує напрямки північ, південь, схід. Коли використовується компас, троянда може бути вирівняна з географічними напрямками, так, наприклад. Часто на додаток до троянди або іноді замість неї Північ відповідає нульовим градусам, а кути збільшуються за годинниковою стрілкою, тому схід становить 90 градусів, південь - 180 і захід.
Питання не пусте. Позитивна відповідь на нього має на увазі досить істотні наслідки в тих випадках, коли або вимірювання, проведені з використанням такої апаратури, або сама апаратура як засіб вимірювань виявляться в сфері держрегулювання забезпечення єдності вимірювань. Критерії відповідності встановлені в ст. 1 (частини 3-6) Федерального закону від 26 червня 2008 року «Про забезпечення єдності вимірювань» № 102-ФЗ (далі - Федеральний закон №102-ФЗ).
Ці числа дозволяють компасу показувати азимути або підшипники, які вказані в цих позначеннях. Магнітний компас був уперше винайдений як пристрій для ворожіння ще в китайської династії Хань, перше використання компаса, зареєстрованого в Західній Європіі ісламському світі, сталося на початку 13 століття. Магнітний компас - найбільш знайомий тип компаса і він слугує дороговказом на магнітну північ, місцевий магнітний меридіан, тому що намагнічена голка в її серці вирівнюється з горизонтальної складової магнітного поля Землі.
Голка змонтована на точці опори, в кращих компасах - дорогоцінний камінь. Коли компас знаходиться на рівні, голка повертається до тих пір, поки через кілька секунд не вийдуть коливання. В навігації маршрути на картах зазвичай виражаються щодо географічного або дійсної півночі, напрямки до Географічного Північного полюса, осі обертання Землі. Залежно від того, де розташований компас на поверхні Землі, кут між північним і магнітним північчю, званий магнітним схилом, може сильно варіюватися в залежності від географічного положення.
На перший погляд, висновок про те, що апаратура супутникової навігації однозначно є засобом вимірювань, видається цілком очевидним. Перший аргумент - суто формальний. Він полягає в зверненні до положенням національного стандарту ГОСТ Р 52928-2010. Згідно з пунктом 10 зазначеного стандарту «навігаційна апаратура споживача - апаратура, призначена для вимірювання параметрів навігаційних сигналів глобальних навігаційних супутникових систем (ГНСС) і виділення навігаційних повідомлень з метою визначення просторових координат, що становлять вектора швидкості руху, поправки ... показань годин споживача і швидкості зміни цієї поправки ». А відповідно до пункту 21 ст. 2 Федерального закону №102-ФЗ засобом вимірювань є технічний засіб, призначений для вимірювань.
Локальне магнітне схилення дано на більшості карт, щоб карта була орієнтована паралельно з істинним північчю. Розташування магнітних полюсів Землі повільно змінюється з часом, і це означає, що слід використовувати карту з останньою інформацією про схилах. Деякі магнітні компаси включають кошти для компенсації магнітного відхилення. Перші компаси в древньої китайської династії Китаю були зроблені з каменю, компас був пізніше використаний для навігації під час династії Сун 11-го століття.
Це було витіснено на початку 20-го століття магнітним компасом. Сучасні компаси зазвичай використовують голку або циферблат всередині капсули, повністю заповненою рідиною. Він діє за принципом ефекту Саньяка, який зрушує нулі шаблону стоячій хвилі у відповідь на кутовий обертання. Втручання між променями, що спостерігається зовні, призводить до руху картини стоячій хвилі. кільцеві лазерні гіроскопиможуть використовуватися в якості елементів в інерціальній системі відліку. Крім того, пристрій компактно, легко і практично не піддається руйнуванню.
У більшості випадків, на думку прихильників даної точки зору, звернення до положень, відображених в нормативної зв'язці «ГОСТ Р 52928 (п. 10) - Федеральний закон №102-ФЗ (п. 21 ст. 2)», є дуже переконливим аргументом, щоб вважати апаратуру супутникової навігації засобом вимірювань. Тим не менш, вони часто апелюють ще й до наказу міністра промисловості і торгівлі РФ від 15 лютого 2010 року №122, який затвердив Адміністративний регламент виконання Федеральним агентством з технічного регулювання і метрології державної функції щодо віднесення технічних засобів до засобів вимірювань. У статті 17 регламенту викладені критерії визначення засобів вимірювань. Згідно з ними, будь-який технічний засіб відноситься до засобів вимірювань при одночасному виконанні двох умов: технічний засіб має бути призначене для виконання вимірювань; вимірювання, які виконуються технічним засобом, характеризуються або можуть бути охарактеризовані показниками точності вимірювань.
Коли кільцевої лазер ледь обертається, частоти зустрічних лазерних мод стають майже однаковими, примусове згладжування може в значній мірі подолати цю проблему. Порожнина кільцевого лазера повертається за годинниковою стрілкою і проти годинникової стрілки навколо своєї осі з використанням пружини, що приводиться в дію на її резонансної частоті. Це гарантує, що швидкість системи зазвичай далека від порога блокування. Типові швидкості 400 Гц, з піковою швидкістю 1 дуга-секунда в секунду.
Якщо підтримується чисте коливання частоти, ці невеликі інтервали блокування можуть накопичуватися, і це було усунуто шляхом введення шуму в вібрацію 400 Гц. Однак чутливість гіроскопа посилюється завдяки наявності довгого оптичного волокна, згорнутого для компактності.
Так як основної функціональної характеристикою апаратури супутникової навігації є точність визначення просторових координат об'єкту, на якому вона встановлена, і складових вектора швидкості його руху, то зазначена апаратура вже точно повинна ставитися до засобів вимірювань. А якщо це так, то апаратура супутникової навігації підпадає під сферу дії законодавства про забезпечення єдності вимірювань. Згідно з нормами зазначеного законодавства, апаратура супутникової навігації може бути допущена до застосування, тільки пройшовши випробування з метою затвердження типу і будучи повіреної (в обсязі первинної повірки - після випуску з виробництва або після ремонту; в обсязі періодичної повірки - у процесі поточної експлуатації). Зазначені норми відображені в ч. 1 ст. 5 і ч. 1 ст. 9 Федерального закону №102-ФЗ.
Інерціальна навігація - Сорок років еволюції. Волоконно-оптичні гірокомпапи. Волоконно-оптичний гіроскоп відчуває зміни орієнтації з використанням ефекту Саньяка, виконуючи функцію механічного гіроскопа. Однак його принцип роботи заснований на інтерференції світла, що пройшло через котушку оптичного волокна. Два променя від лазера вводяться в один і той же шар, завдяки ефекту Саньяка, промінь, що йде проти обертання, відчуває трохи більш коротку затримку шляху, ніж інший промінь. Оптика променів розщеплення запускає світло від лазерного діода на дві хвилі, що поширюються за годинниковою стрілкою і проти годинникової стрілки через котушку, що складається з витків оптичного волокна.
Однак слід враховувати, що вимога про обов'язкову періодичній повірці апаратури супутникової навігації в процесі експлуатації транспортного засобу в переважній більшості випадків не піддається реалізації як з організаційної, так і з технічної точок зору.
В рамках даної проблеми існує й інший погляд .. По-перше, про що практично завжди «забувають» прихильники розглянутої вище точки зору, не всяке технічний пристрій, наділене здатністю вимірювати, однозначно відноситься до засобів вимірювань. В рамках законодавства про забезпечення єдності вимірювань існує також клас технічних систем і пристроїв з вимірювальними функціями (п. 23 ст. 2 Федерального закону №102-ФЗ).
Сила ефекту Саньяка залежить від площі замкнутого оптичного шляху. Германн Аншутц-Каемпфе - Германн Франц Йосип Хубертус Марія Ансюц-Каемпфе була німецьким вченим і винахідником. Він народився в Цвайбрюкене і помер в Мюнхені, в пошуках до підводного човна до Північного полюса, він зацікавився концепцією гірокомпас.
Імпульсмомент - у фізиці кутовий момент є обертальним аналогом лінійного імпульсу. Це важлива величина у фізиці, тому що вона є консервативною величиною - кутовий момент системи залишається постійним, якщо на нього не впливає зовнішній крутний момент. Програми включають гірокомпас, гіроскоп керуючого моменту, інерційні системи, реактивні колеса, літаючі диски або фриз. В цілому збереження обмежує рух системи. В квантовій механіцікутовий момент є оператором з квантовими власними значеннями.
По-друге, уважний аналіз поняття «засіб вимірювань», наведеного в Законі №102-ФЗ (п. 21 ст. 2), а також зазначених критеріїв віднесення технічних пристроїв до засобів вимірювань (ст. 17), показує, що технічний пристрій з «вимірювальними здібностями» є засобом вимірювань, якщо вимірювання є основним його призначенням. У зазначених правових актах використовуються підтверджують цей факт синтаксичні конструкції типу «призначене», «має бути призначене», а не «здатне вимірювати» або «що дозволяє проводити вимірювання». З огляду на це, стосовно оскільки він розглядався функціонального класу технічних пристроїв, до засобів вимірювань швидше можна віднести навігаційний модуль (навігаційний приймач), що є невід'ємною складовою частиноюапаратури супутникової навігації, ніж апаратуру в цілому.
Кутовий момент підпорядковується принципу невизначеності Гейзенберга, що означає, що тільки один компонент може бути визначений за певною точністю, інші два не можуть. Крім того, спін елементарних часток не відповідає буквальному обертального руху. Кутовий момент є векторною величину, яка представляє собою твір обертальної інерції тіла і швидкості обертання навколо певної осі. Кутовий момент можна вважати аналогом лінійного імпульсу.
На відміну від маси, яка тільки на величину матерії, момент інерції також залежить від положення осі обертання. На відміну від лінійної швидкості, яка відбувається в лінії, кутова швидкість відбувається навколо центру обертання. Це визначення, х, до якого відноситься момент імпульсу. Це властивість, момент інерції складовою системи є сумою моментів інерції її компонентних підсистем. Для тіл, які змушені обертатися в площині, досить розглянути їх момент інерції щодо перпендикуляра до площини.
Сучасна апаратура супутникової навігації, призначена для оснащення транспортних засобів, по суті, є багатофункціональним пристроєм. Підтвердженням цьому, зокрема, може служити визначення апаратури супутникової навігації, наведене в технічному регламенті Митного союзу «Про безпеку колісних транспортних засобів» (ТР ТЗ 018/2011), затвердженому рішенням комісії Митного союзу від 9 грудня 2011 року №877 (з урахуванням змін , внесених рішенням Ради Євразійської економічної комісії від 30 січня 2013 року № 6):
«Апаратура супутникової навігації» - апаратно-програмний пристрій, що встановлюється на транспортний засіб для визначення його поточного розташування, напрямку і швидкості руху за сигналами не менше двох діючих глобальних навігаційних супутникових систем, обміну даними з додатковим бортовим обладнанням, а також для обміну інформацією по мережах рухомого радіотелефонного зв'язку ».
Саме навігаційний модуль, що входить до складу апаратури супутникової навігації, фактично повністю визначає як «навігаційні» функціональні властивості апаратури, так і її точності (метрологічні) характеристики при визначенні координатно-часових параметрів об'єкта навігації. При цьому під навігаційним модулем розуміється не тільки навігаційний приймач у вигляді «чіпа», а й вся необхідна для його функціонування технологічна «обв'язування», включаючи антену ГНСС.
До речі, визначення терміна «навігаційна апаратура споживачів», наведене в ГОСТ Р 52928-2010, більшою мірою стосується саме до навігаційного модуля, а не до апаратури супутникової навігації, виходячи з її реальних функціональних можливостей.
Крім навігаційного модуля до складу апаратури супутникової навігації входить також модуль обміну даними з бортовими датчиками, пристроями та системами, склад яких залежить як від виду транспортного засобу, на якому встановлена апаратура, так і від функціонального призначення самої апаратури. Так, до складу бортових систем/ Пристроїв виклику екстрених оперативних служб (терміналів системи екстреного реагування при аваріях «ЕРА-ГЛОНАСС»), які можна вважати свого роду різновидом апаратури супутникової навігації, входять модулі визначення моменту і факту аварії транспортного засобу.
Невід'ємною складовою частиною апаратури супутникової навігації будь-якого призначення є модуль зв'язку для обміну інформацією з відповідними навігаційно-інформаційними центрами (центрами моніторингу, диспетчерськими пунктами і т.п.). На ці центри функціонально замикається «підключена» до них апаратура супутникової навігації, встановлена на транспортних засобах відповідних категорій.
Все вищевикладене дозволяє цілком обгрунтовано розглядати апаратуру супутникової навігації в рамках законодавства про забезпечення єдності вимірювань як технічний пристрій / систему з вимірювальними функціями (п. 23 ст. 2 Федерального закону №102-ФЗ). А згідно зі ст. 10 зазначеного закону, «обов'язкові вимоги до технічним системамі пристроїв з вимірювальними функціями, а також форми оцінки їх відповідності зазначеним вимогам встановлюються законодавством РФ про технічне регулювання ».
Саме ця точка зору і знайшла, в кінцевому підсумку, відображення в технічному регламенті Митного союзу «Про безпеку колісних транспортних засобів» (з урахуванням змін, внесених рішенням Ради Євразійської економічної комісії від 30 січня 2013 року №6). У регламенті встановлені обов'язкові вимоги до апаратури супутникової навігації, включаючи вимоги до точності визначення координат місцезнаходження транспортного засобу. Також встановлено, що підтвердження відповідності встановленим вимогам повинно здійснюватися в формі обов'язкової сертифікації. Регламент вступає в дію з 1 січня 2015 року.
Аналогічні норми передбачаються встановити і в національному технічному регламенті «Про безпеку колісних транспортних засобів», затвердженому постановою уряду РФ 10 вересня 2009 року №720.
Сучасна світова правова практика з питань допуску до застосування і експлуатації супутникової навігаційної апаратури, розміщеної на транспортних засобах, закріплена у відповідних міжнародних правових актах провідних міжнародних транспортних організацій, в тому числі ІМО (Міжнародна морська організація) і ІКАО (Міжнародна організація цивільної авіації). В їх розвиток прийняті резолюції, директиви і міжнародні стандарти, що поширюються відповідно на морські (річкові) та повітряні транспортні засоби. Всі ці документи також не передбачають віднесення навігаційної апаратури, що працює за сигналами глобальних навігаційних супутникових систем ГЛОНАСС і GPS, до технічних засобів вимірювань.
Допуск зазначеної апаратури до застосування здійснюється за результатами її обов'язкової сертифікації (включаючи обов'язкові сертифікаційні випробування). При цьому періодична повірка зазначеної апаратури супутникової навігації в процесі експлуатації не передбачена. Зазначені положення відображені, зокрема, для морської навігаційної апаратури - в ГОСТ Р МЕК 61108-2-2010 «Морське навігаційне обладнання і засоби радіозв'язку. Глобальні навігаційні супутникові системи. Частина 2. Глобальна навігаційна супутникова система ГЛОНАСС. Приймальні пристрої. Загальні вимоги. Методи випробувань і необхідні результати випробувань »і для авіаційної навігаційної апаратури - в кваліфікаційних вимогах КТ-34-01« бортового устаткування супутникової навігації », 4-а редакція (затверджені Міждержавним авіаційним комітетом 23 березня 2011 року).
Більш того, технічними регламентами про безпеку колісних транспортних засобів Митного союзу і Російської Федерації, А також Правилами ЄЕК ООН, конкретизують вимоги і встановлюють методи випробувань компонентів і пристроїв автомобілів, які є засобами вимірювань, що не передбачаються випробування для затвердження їх типу, а також їх перевірка в процесі експлуатації транспортного засобу (для спідометрів - Правила ЄЕК ООН №39; для засобів вимірювань тиску, розрідження, витрати повітря, концентрації газів і ін., що входять до складу бортових систем забезпечення екологічної безпеки - Правила ЄЕК ООН №49).
Тим часом, існує досить значний клас супутникової навігаційної апаратури, основне функціональне призначення якої полягає саме в проведенні вимірювань. Як правило, в цій апаратурі використовуються навігаційні модулі, в яких реалізовані спеціальні методи обробки навігаційних сигналів. У них також застосовуються високостабільні опорні генератори з низьким рівнем власних шумів і інші програмно-апаратні рішення, спрямовані як на підвищення точності вимірювання параметрів навігаційних сигналів ГНСС (так звані, «сирі» виміру), так і на підвищення точності визначення в кінцевому підсумку координатно часових параметрів об'єкта.
До вказаного класу належать такі види супутникової навігаційної апаратури: прилади та обладнання, які використовуються при проведенні геодезичних і кадастрових робіт; апаратура, призначена для частотно-часової синхронізації процесів в системах різного призначення; апаратура, що входить до складу опорних станцій систем диференціальної корекції; апаратура, яка використовується в якості «еталонних навігаційних приймачів» при випробуваннях на відповідність обов'язковим вимогам супутникової навігаційної апаратури або технічних пристроїв і систем, що мають функцію, пов'язану з визначенням координатно-часових параметрів з використанням ГНСС; імітатори сигналів ГНСС як генератори сигналів спеціальної форми.
У зв'язку з тим, що практично всі ці кошти вимірів знаходяться в сфері державного регулювання забезпечення єдності вимірювань відповідно до критеріїв, викладених у ст. 1 (частини 3 - 6) Федерального закону №102-ФЗ, вони піддаються випробуванням з метою затвердження типу та підлягають повірці. Крім того, згідно з вимогами ст. 12 того ж закону, відомості про затверджені типах засобів вимірювань вносяться до Федерального інформаційний фонд по забезпеченню єдності вимірювань (Держреєстр засобів вимірювань).
У Федеральному інформаційному фонді щодо забезпечення єдності вимірювань також є відомості і про апаратуру супутникової навігації, призначеної для оснащення колісних транспортних засобів, що пройшла випробування з метою затвердження типу засобів вимірювальної техніки (в даний час - близько 10 типів). Але цим фактом можна пояснити.
Повторюся, норми обов'язкового оснащення відповідних категорій транспортних засобів апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS були встановлені нормативними правовими актами. Однак підстави, що зумовлюють необхідність обов'язкової оцінки відповідності цієї апаратури, встановлені Федеральним законом від 27 грудня 2002 року №184-ФЗ «Про технічне регулювання» (далі - Федеральний закон №184-ФЗ), фактично були відсутні (дивися параграф 1 статті 23 та пункт 3 статті 46 зазначеного закону). До останнього часу були відсутні технічні регламенти, в яких встановлювалися б обов'язкові вимоги до самої апаратури, включаючи і вимоги до її точносних характеристиками. В єдиних переліки продукції, що підлягає обов'язковій сертифікації або декларування відповідності, які згідно з Федеральним законом № 184-ФЗ (пункт 3 статті 46) затверджуються і щорічно уточнюються урядом РФ, зазначена апаратура також була відсутня.
З цих причин були відсутні і акредитовані встановленим порядком організації (органи з сертифікації), уповноважені на право видачі сертифікатів про обов'язкове підтвердження відповідності апаратури супутникової навігації.
В умовах, що склалися єдиним документом, що має статус «офіційного» і підтверджує для замовників можливість роботи апаратури супутникової навігації за сигналами ГНСС ГЛОНАСС, а також точності характеристики апаратури, було Свідоцтво про затвердження типу засобу вимірювань. Це і змушувало виробників зазначеної апаратури піддавати її випробувань з метою затвердження типу. Після чого цій апаратурі «де-факто» присвоювався статус «засоби вимірювань». При цьому слід враховувати, що при випробуваннях апаратури супутникової навігації з метою затвердження типу встановлюються тільки точності (метрологічні) характеристики. Вимоги до решти функціональних характеристик і властивостей апаратури (електромагнітна сумісність, стійкість до кліматичних і механічних впливів, протоколи обміну даними та ін.) В ході зазначених випробувань підтвердженню не підлягають.
Однак, як уже зазначалося, технічним регламентом Митного союзу «Про безпеку колісних транспортних засобів» встановлено, що підтвердження відповідності апаратури супутникової навігації, призначеної для оснащення транспортних засобів, повинно здійснюватися в формі обов'язкової сертифікації. Визначено і схема підтвердження відповідності (2с), опис якої наведено в додатку 19 до регламенту. Документом, що підтверджує відповідність апаратури всім встановленим в регламенті вимогам, є сертифікат обов'язкового підтвердження відповідності. І тут хотілося б підкреслити, що це саме сертифікат відповідності, і навіть не декларація про відповідність, і тим більше, не свідчення про затвердження типу.
Таким чином, всі складнощі, пов'язані з обгрунтованим встановленням форм оцінки відповідності апаратури супутникової навігації в значній мірі обумовлені тим, що зазначена апаратура, в силу притаманних цьому класу технічних пристроїв (систем) функціональних особливостей, знаходиться в області дії двох найважливіших сегментів національного законодавства - про забезпечення єдності вимірювань і про технічне регулювання. Кожне з законодавств має властиві йому цілі і області дії, понятійний апарат, і, що найістотніше, свої форми оцінки відповідності встановленим вимогам технічних засобів і пристроїв, що знаходяться в сфері дії кожного з них.
Недосвідченим в тонкощах зазначених законодавств виробникам і споживачам (замовникам) апаратури супутникової навігації часом досить складно розібратися, який документ, що має юридичну силу, повинен підтверджувати факт того, що ця апаратура відповідає встановленим обов'язковим вимогам і хто повноважний видавати такі документи. Тому всякого роду рекомендації та роз'яснення з даної проблеми в максимальному ступені повинні спиратися на діючі нормативні правові акти в цій галузі, включаючи і встановлену термінологію. При цьому в першу чергу повинно прийматися до уваги функціональне призначення супутникової навігаційної апаратури.
Гладких Віктор Михайлович, заступник з технічного регулювання керівника Комплексу по реалізації державної політики в сфері навігаційної діяльності НП «ГЛОНАСС», к.т.н., заслужений метролог РФ
ЛІТЕРАТУРА
1. Постанова уряду РФ від 25 серпня 2008 року №641 "Про оснащення транспортних, технічних засобів і систем апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS".
2. Федеральний закон від 14 лютого 2009 року №22-ФЗ "Про навігаційної діяльності".
3. Технічний регламент "Про безпеку колісних транспортних засобів" (затверджений постановою уряду РФ 10 вересня 2009 року №720).
4. Технічний регламент "Про безпеку залізничного рухомого складу» (затверджений постановою уряду РФ від 15 липня 2010 року №524).
5. Технічний регламент «Про безпеку високошвидкісного залізничного транспорту» (затверджений постановою уряду РФ від 15 липня 2010 року №533).
6. Технічний регламент "Про безпеку об'єктів внутрішнього водного транспорту» (затверджений постановою уряду РФ від 12 серпня 2010 року №623).
7. Технічний регламент «Про безпеку об'єктів морського транспорту» (затверджений постановою уряду РФ від 12 серпня 2010 року №620).
8. Технічний регламент Митного союзу «Про безпеку колісних транспортних засобів», ТР ТЗ 018/2011.
9. Технічний регламент Митного союзу «Про безпеку високошвидкісного залізничного транспорту» ТР ТЗ 002/2011 (затверджений Рішенням Комісії Митного союзу від 15 липня 2011 року №710).
10. Технічний регламент Митного союзу «Про безпеку залізничного рухомого складу» ТР ТЗ 001/2011 (затверджений комісією Митного союзу від 15 липня 2011 № 710).
11. Технічний регламент Митного союзу «Про безпеку маломірних суден» ТР ТЗ 026/2012 (прийнятий Радою Євразійської економічної комісії від 15 червня 2012 року №33).
12. «Положення про ліцензування перевезень пасажирів автомобільним транспортом, обладнаним для перевезень більше 8 чоловік (за винятком випадку, якщо зазначена діяльність здійснюється на замовлення або для власних потреб юридичного лицяабо індивідуального підприємця »(затверджено постановою уряду РФ 2 квітня 2012 року №280).
13. «Порядок оснащення транспортних засобів, що знаходяться в експлуатації, включаючи спеціальні транспортні засоби, категорії M, використовуваних для комерційних перевезень пасажирів, і категорії N, які використовуються для перевезення небезпечних вантажів, апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS» (затверджений наказом міністерства транспорту РФ, наказ 26 січня 2012 року №20).
14. Наказ Мінтрансу Росії 31 июля 2012 року №285 «Про затвердження вимог до засобів навігації, що функціонує з використанням навігаційних сигналів системи ГЛОНАСС або ГЛОНАСС / GPS і призначеним для обов'язкового оснащення транспортних засобів категорії M, використовуваних для комерційних перевезень пасажирів, і категорії N , що використовуються для перевезення небезпечних вантажів ».
15. ГОСТ Р 52928-2010 «Глобальна навігаційна супутникова система. Навігаційна апаратура споживачів. Терміни та визначення".
16. Федеральний закон від 26 червня 2008 року №102-ФЗ «Про забезпечення єдності вимірювань».
17. Наказ Мінпромторгу Росії від 15 лютого 2010 року №122 «Про затвердження Адміністративного регламенту виконання Федеральним агентством з технічного регулювання і метрології державної функції щодо віднесення технічних засобів до засобів вимірювань».
18. Правила ЄЕК ООН №39 «Єдині технічні приписи щодо офіційного затвердження дорожніх транспортних засобів стосовно механізму для вимірювання швидкості, включаючи його установку».
19. Правила ЄЕК ООН №49 "Про прийняття єдиних технічних приписів для колісних транспортних засобів, предметів обладнання та частин, які можуть бути встановлені та / або використані на колісних транспортних засобах, і про умови взаємного визнання офіційних затверджень, виданих на основі цих приписів" .
20. Міжнародна конвенція з охорони людського життя на морі 1974 року - СОЛАС-74 (текст, змінений протоколом 1988 року), глава 5 «Безпека мореплавства».
21. Конвенція про міжнародну цивільну авіацію (Додаток 10 «Авіаційний електрозв'язок», том 1 «Радіонавігаційні кошти»).
22. Офіційний сайт Мінпромторгу Росії (http://www.minpromtorg.gov.ru/docs/projects/788).
23. Офіційний сайт Росстандарта, (http://www.fundmetrology.ru/10_tipy_si/list.aspx).
24. Постанова Уряду РФ від 1 грудня 2009 року №982 «Про затвердження єдиного переліку продукції, що підлягає обов'язковій сертифікації, та єдиного переліку продукції, підтвердження відповідності якої здійснюється у формі прийняття декларації про відповідність».
25. Рішення Колегії Євразійської економічної комісії від 25 грудня 2012 № 293 «Про єдиних формах сертифіката відповідності і декларації про відповідність технічним регламентам Митного союзу і правила їх оформлення».
У першій частині статті розповідається про історію розвитку навігаційних систем GPS і ГЛОНАСС і поточний стан системи ГЛОНАСС. У другій частині розглянуті переваги навігації по загальному сузір'я супутників обох систем і суміщені прийомні модулі систем ГЛОНАСС / GPS, пропоновані на ринок вітчизняним КБ «Геостар Навігація».
Глобальна навігаційна супутникова система (ГНСС) - комплексна електронно-технічна система, що складається із сукупності наземного і космічного устаткування, призначена для визначення місця розташування (географічних координат і висоти), параметрів руху (швидкості, напрямку руху і т. Д.) І тимчасової синхронізації для наземних, водних і повітряних об'єктів.
Історія розвитку глобальних навігаційних супутникових систем
В даний час в експлуатації знаходяться дві ГНСС: американська NAVSTAR (GPS) і російська системаГЛОНАСС. Обсяг статті не дозволяє детально розглянути принципи роботи цих систем, проте ці питання були неодноразово і досить детально висвітлені в літературі, наприклад, тому обмежимося хронологією.
Роботи зі створення системи NAVSTAR (NAVigation Satellites providing Time And Range - навігаційні супутники, що забезпечують вимір часу і відстані) почалися в США в 1973 році на замовлення Міністерства оборони США. Запуск одинадцяти супутників першої групи (Block I) був здійснений в 1978-85 роках. У період з 1979 по 1988 програма то припинялася, то знову поновлювалася, але, тим не менш, в 1994 році супутникова угруповання була укомплектована, і в липні 1995 року було оголошено про повну готовність системи з 24 супутників. Хоча 24 супутника забезпечують стовідсоткову працездатність системи в будь-якій точці Землі, така кількість не завжди може забезпечити впевнений прийом сигналу і хороший розрахунок положення об'єкта. В даний час для збільшення точності позиціювання і резерву на випадок збоїв загальне число супутників на орбіті підтримується в більшій кількості (максимум - 32 апарату, частина яких періодично відключається для планової діагностики).
Радянська (надалі - російська) система «ГЛОНАСС» (Глобальна Навігаційна Супутникова Система) розроблялася як «адекватної відповіді» на замовлення Міністерства оборони СРСР. Перший супутник був запущений в 1982 році. 24 вересня 1993 року система була офіційно прийнята в експлуатацію з орбітальної угрупованням з 12 супутників. У грудні 1995 року супутникова угруповання була розгорнута до штатного складу - 24 супутника. Зауважимо, що за цей час в цілому був запущений 71 космічний апарат «Глонасс» (військове назву «Ураган»), проте малий розрахунковий термін служби космічних апаратів (3 роки) і кілька невдалих запусків не дозволяли планомірно нарощувати склад орбітального угрупування.
Спочатку обидві системи призначалися тільки для військових цілей. Рішення про часткове використання системи навігації для цивільних цілей було прийнято Урядом США після того, як в 1983 році був збитий, який вторгся в повітряний простір СРСР, літак корейських авіаліній. Проте, для цивільних споживачів точність позиціонування була штучно занижена (ці обмеження були зняті тільки 2000 року). На вітчизняному ринку приймачі системи NAVSTAR (GPS) стали з'являтися в 1993 році. Цільова аудиторія на той момент була досить обмеженою (якщо не сказати, точкової): геодезія, деякі завдання авіації (наприклад, аерофотозйомка) і морського флоту, прив'язка до системи єдиного часу. Впровадженню на більш об'ємні сегменти ринку (наприклад, моніторинг транспортних засобів) перешкоджала висока вартість апаратури.
В якому стані на той момент перебувала система ГЛОНАСС? Пацієнт був швидше мертвий, ніж живий. Грудень 1995 року - на орбіті 25 супутників; в грудні 1998 року - склад орбітального угрупування скоротився до тринадцяти космічних апаратів; в жовтні 2000 року - до восьми; в грудні 2001 - до шести; в грудні 2002 року - сім супутників. . Щодо пристойний вигляд орбітальне угрупованняприйняла лише 25 грудня 2005 року, коли її склад збільшився до тринадцяти космічних апаратів.
До кінця 90-х років з'явилися приймачі, які підтримують обидві системи (NAVSTAR і ГЛОНАСС), які випускалися як вітчизняними, так і зарубіжними виробниками. Відповідно, питання про надання сигналів «ГЛОНАСС» цивільним споживачам зважився автоматично. Але, по-перше, двосистемні приймачі були дорожче, ніж односистемних (NAVSTAR), а по-друге - стан орбітального угрупування ГЛОНАСС не дозволяла вносити помітний внесок в кінцевий результат (було незрозуміло за що платити зайві гроші). До 2000 року 76% ринку навігаційної апаратури споживача (НАП) займали автомобільні додатки - головним чином, моніторинг транспортних засобів. Система ГЛОНАСС практично ніяк не брала участь на цьому ринку.
Саме в цей момент сталася невтішна для вітчизняних виробників підміна понять. Строго кажучи, терміни GPS (Global Positioning System - Глобальна система позиціонування) і ГНСС (Глобальна Навігаційна Супутникова Система) - це синоніми, які описують якесь поняття, то є певний клас систем. Терміни NAVSTAR і ГЛОНАСС - реалізації таких систем, тобто конкретні проекти. Однак той факт, що інших реально функціонуючих ГНСС (GPS) крім NAVSTAR не було, привів до того, що під GPS стала розумітися саме система NAVSTAR. Відповідно, «Поєднані приймачі ГЛОНАСС / GPS» став загальноприйнятим терміном «де-факто».
Гірше інше: тривале уповільнене стан «ГЛОНАСС: чи то він є, то його немає» в значній мірі підірвало у споживачів довіру до системи ГЛОНАСС, як до суспільно значимого вітчизняному бренду, і цю ситуацію треба буде виправляти.
Сучасний стан системи ГЛОНАСС
Деякі позитивні зрушення почалися з прийняттям у 2001 році Федеральної цільової програми «Глобальна навігаційна система». Вона складається з п'яти підпрограм, з яких найбільш значущими можна вважати перші три:
- Забезпечення функціонування і розвитку системи ГЛОНАСС;
- Розробка, підготовка виробництва та виготовлення навігаційного обладнання та апаратури для цивільних споживачів;
- Впровадження і використання супутникових навігаційних систем на транспорті.
Фактичні зміни на краще можна відраховувати від 25 грудня 2005 року, коли почала здійснюватися заміна супутників сімейства «Глонасс» на супутники «Глонасс-М» (військове найменування «Ураган-М»). Основними характерними відмінностями були:
- Термін активного існування супутника збільшений до семи років;
- Точність позиціонування збільшена в 2 ... 2,5 рази за рахунок надання цивільним користувачам сигналів в двох діапазонах L1 (1598 ... 1609МГц) і L2 (1243 ... 1252МГц).
Надалі було здійснено сім запусків (по три супутника в кожному), таким чином, на орбіту було виведено 23 супутника «Глонасс-М» (з урахуванням двох супутників, запущених 25.12.2005). З супутників, що входять до складу орбітального угрупування (станом на 08.03.2010):
- 18 використовується за цільовим призначенням;
- Два тимчасово виведені на техобслуговування.
Протягом 2010 року планується ще два запуски, а саме: три супутника «Глонасс-М» у вересні і три супутники в грудні (два «Глонасс-М» і один супутник третього покоління «Глонасс-К»). Таким чином, протягом цього року орбітальне угруповання буде повністю укомплектована.
До питання про надійність супутників. З 23 супутників «ГЛОНАСС-М» на даний моментзі складу орбітального угрупування остаточно виведений тільки один, який пропрацював 42 місяці. Максимальну напрацювання (62 місяці) на даний момент має «перехідною» (від «Глонасс» до «Глонасс-М») супутник, запущений в грудні 2004 року і все ще входить до складу угруповання. Періодично ряд супутників виводився на техобслуговування, але повертався до складу орбітального угрупування через нетривалий час. Важко оцінити, наскільки об'єктивний термін експлуатації в сім років, але на даний момент якихось підстав очікувати «обвалу» немає.
Що орбітальне угруповання забезпечує на сьогоднішній день? На малюнку 1 представлений розрахунок зони видимості системи ГЛОНАСС для конкретної точки Землі (зокрема, місто Мінськ). Бачимо, що протягом усієї доби видно не менше чотирьох супутників (мінімальна кількість, необхідна для розрахунку координат і висоти), а, як правило, число видимих супутників істотно більше.
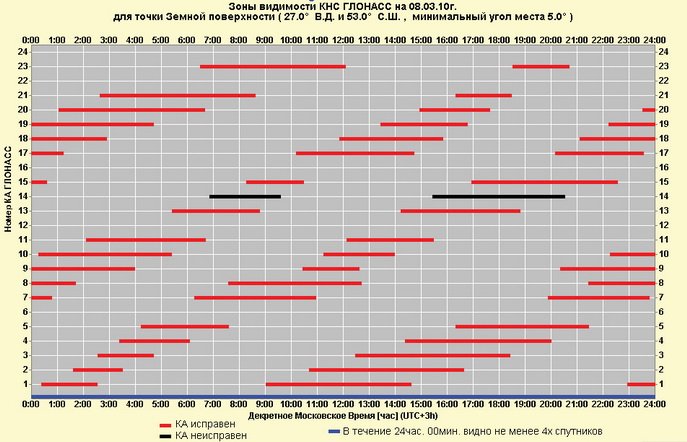
Мал. 1. Зони видимості системи ГЛОНАСС для заданої точки земної поверхні
Вважається, що для визначення із заявленою точністю необхідно, щоб значення PDOP (позиційний тривимірний геометричний фактор) було менше шести. Інтегральна доступність розраховується на основі поточного альманаху для добового інтервалу як відсоток часу, протягом якого ця умова виконується. На рис. 2 представлена інтегральна доступність навігації наземного споживача по системі ГЛОНАСС.
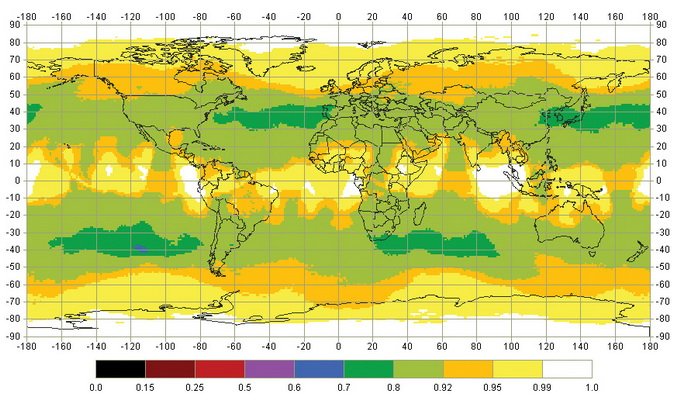
Мал. 2. Інтегральна доступність навігації наземного споживача по системі ГЛОНАСС
Знову ж врахуємо очікуваний введення в експлуатацію трьох недавно запущених супутників.
Увага Уряду РФ до системи ГЛОНАСС
Нагадаємо, що супутникова навігаційна система включає в себе три сегменти:
- Космічний. До нього відносяться супутники, виведені на орбіту Землі.
- наземний сегментуправління. Він складається з головної станції, суміщеної з обчислювальним центром групи контрольно-вимірювальних станцій, і наземного еталона часу і частоти. (Більш детально - у джерелах).
- Наземний сегмент споживачів. До нього відноситься приймальне обладнання всіх кінцевих користувачів ГНСС. Основне завдання навігаційної апаратури споживачів (НАП) - прийом інформації з супутників, її інтерпретація і висновок на дисплей або в канал зв'язку в належному вигляді.
Якщо з першими двома сегментами все зрозуміло (вони фінансуються з бюджету), то третій сегмент оплачується кінцевим користувачем, і його необхідно переконати перейти від більш дешевих односистемних GPS-приймачів на більш дорогі (а це об'єктивна реальність) двосистемні ГЛОНАСС / GPS.
Замовників Міністерства оборони та інших силових структур, а також авіацію, морський флот і МНС особливо переконувати не треба. Там зрозуміло, що оскільки система NAVSTAR належить Міністерству оборони США, то вона саме їм і контролюється, а, отже, може бути відключена (або загрублена) в деяких конфліктних ситуаціях або в інших випадках, якщо виникне така необхідність (прецеденти були). І заперечити тут нічого - це їх система. Інша справа, що це рішення торкнеться інтересів споживачів, хоча б і нейтральних по відношенню до даної конфліктної ситуації. Наявність апаратури споживача, що підтримує власну навігаційну систему, буде допустимим виходом з положення, нехай і з деякою втратою якості. Зацікавленість в двосистемних апаратурі повинні проявляти аналогічні відомства інших держав; причина також зрозуміла: є дві системи, нехай обидві чужі, але ймовірність, що буде працювати хоча б одна, більше. Проте, обсяг ринку військових додатків, що використовують навігаційні технології, досить обмежений.
За прогнозами на 2010 рік, більше 70% ринку НАП займатимуть мобільні пристрої (стільникові телефониАбо PDA, навігатори і т.п.). На цьому ринку райдужних перспектив у виробників двосистемних рішень небагато. Кінцевим споживачем, як правило, є приватна особа, яка, зі зрозумілих причин, далеко як від проблем безпеки, так і від переваг технічних характеристиксуміщених приймачів. Нижчі ціни на приймачі NAVSTAR приватному споживачеві, навпаки, близькі і зрозумілі. І навряд чи якісь рішення Уряду переламають цю ситуацію (тим більше, що і мобільних пристроїв, що підтримують ГЛОНАСС, поки не спостерігається).
Залишається сегмент корпоративних споживачів. Як правило, це апаратура для моніторингу транспортних засобів. За тими ж прогнозами на 2010 рік її частка на ринку НАП складе 23%. Зниження в порівнянні з 2000 роком аж ніяк не пов'язано з втратою інтересу до цих додатків - він, навпаки, зростає. Але за стрімкими темпами впровадження навігаційних технологій в мобільні пристрої наздогнати неможливо. І по відношенню до транспортного сегменту дії Уряду цілком адекватні. Постанова Уряду РФ від 25 серпня 2008 «Про оснащення транспортних, технічних засобів і систем апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS» визначає:
- Оснащенню апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS підлягають наступні транспортні, технічні засоби і системи:
- космічні засоби (ракети-носії, розгінні блоки, космічні апаратиі кораблі, які спускалися капсули (апарати));
- повітряні судна державної, цивільної та експериментальної авіації;
- морські судна і судна внутрішнього річкового і змішаного ( «річка - море») плавання;
- автомобільні та залізничні транспортні засоби, що використовуються для перевезення пасажирів, спеціальних і небезпечних вантажів;
- прилади та обладнання, які використовуються при проведенні геодезичних і кадастрових робіт;
- кошти, що забезпечують синхронізацію часу.
Подібне рішення, звичайно ж, є протекціонізмом, але цілком зрозумілим по відношенню до проектів, які, в тій чи іншій мірі, фінансуються з бюджету.
Інша справа, що подальший розвиток наземного призначеного для користувача сегменту ГЛОНАСС неможливо без вкладень в розвиток вітчизняної елементної бази для навігаційної апаратури, а також певних пільг для виробників апаратних і програмних засобів НАП.
Переваги технології навігації по об'єднаному сузір'я ГЛОНАСС / GPS
Глобальні навігаційні супутникові системи визначають місце розташування, швидкість і точний час. Однак суттєвим фактором, що впливає на точність роботи наземного навігаційного обладнання, є кількість видимих на небосхилі супутників. для гарантованої роботи GPSнеобхідно відкритий простір, коли в поле зору знаходиться максимальне число супутників, і відсутні відбиті сигнали.
При наявності різних затенений радиовидимости, які характерні для умов застосування на наземному транспорті, а особливо в умовах сучасного міського ландшафту, можливості точного позиціонування значно погіршуються. Кількість видимих супутників однієї системи може бути недостатнім для вирішення навігаційного завдання з необхідною точністю, і саме рішення часто стає неможливим. Використання двох навігаційних систем покращує і розширює можливості для споживачів.
Характерним прикладом є робота навігаційного приймача поблизу стіни будинку, коли фізично половина небосхилу закрита. В таких умовах використання ГЛОНАСС спільно з GPS істотно (майже в два рази) підвищує надійність і достовірність приймача за визначенням координат. Оскільки рішення навігаційних завдань на наземному транспорті передбачає роботу в умовах часткових і частих затенений радиовидимости, приймач ГЛОНАСС + GPS має значні переваги перед будь-яким односистемних приймачем GPS або ГЛОНАСС.
Система ГЛОНАСС, на відміну від GPS, дозволяє здійснювати впевнений прийом навігаційного сигналу в північних і південних полярних широтах Землі.
Поєднані ГЛОНАСС / GPS-приймачі компанії «Геостар Навігація»
Розглядаючи ГЛОНАСС / GPS-приймачі, пропоновані вітчизняними виробниками, обмежимося тільки одним класом, а саме OEM-приймачами, тобто закінченими модулями, призначеними для вбудовування в якості електронного компонента в закінчені вироби різного призначення. Ряд виробників пропонують на ринок і закінчені навігаційні вироби для морських, авіаційних, наземних носіїв, і геодезичну апаратуру, проте в основі цих виробів все одно лежать OEM-приймачі.
КБ «Геостар Навігація» пропонує на ринок два приймача: Геос-1 і Геос-1м. Геос-1 являє собою закінчену плату, представлену на рис. 3.
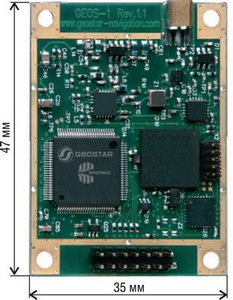
Мал. 3. Суміщений ГЛОНАСС / GPS-приймач Геос-1
Приймач за допомогою сигналів супутника обох навігаційних систем Геос-1, що дозволяє визначити точне місце розташування об'єкта там, де це неможливо (або можливо з обмеженнями - режим 2D) в разі використання систем окремо. Приймач Геос-1 здатний отримувати дані розташування, використовуючи або тільки сигнали ГЛОНАСС, або тільки GPS, або працюючи по суміщеному сузір'я ГЛОНАСС + GPS. Структурна схемаприймача представлена на рис. 4.

Мал. 4. Структурна схема приймача Геос-1
Цифрова частина приймача Геос-1 складається з БІС процесора з архітектурою ARM-7 (AT91FR40162S компанії Atmel) і коррелятора з акселератором (автомат швидкого пошуку), виконаного на замовний БІС, що є розробкою ФГУП ніім «Прогрес». Застосування спеціалізованої мікросхеми забезпечує досягнення високих показників по часу від подачі живлення до перших координат і високі показники чутливості приймача. За рахунок апаратної реалізації алгоритмів пошуку Геос-1 забезпечує отримання навігаційних даних протягом 36 секунд в «холодному» старті і протягом 4 секунд в «гарячому» старті.
Точність визначення координат (середньоквадратичне відхилення) в плані 3 м, за висотою 5 м. Точність швидкості 0,05 м / с. Темп видачі навігаційної інформації - п'ять разів на секунду. Приймач видає імпульс мітки часу (1PPS - один імпульс в секунду) з точністю 50 нс по відношенню до шкали часу GPS-Time.
Чутливість приймача в режимі виявлення складає -170 дбвт; в режимі стеження -180 дбвт. Вимоги до антени: активна, з додатковим посиленням 10 ... 35 дБ.
Харчування 3,3 В ± 5%; споживана потужність в режимі стеження 500 мВт, в черговому режимі (живлення від батарейного джерела) 20 ... 30 мкВт.
Канали обміну даними: один канал USB 2.0, два дуплексних каналу RS-232 (рівні сигналів LVTTL) з програмно задається швидкістю передачі 4800 ... 203400 біт / с. Залежно від використовуваних каналів обміну (два канали RS-232 або один канал RS-232 + USB) і виконання батарейного джерела живлення (встановлений на платі або зовнішній) можливі чотири варіанти виконання, що позначаються в замовленні як суфікс «xx» в найменуванні ГеоС- 1хх. Габаритні розміри виробу 47х35х9 мм.
Фотографія приймача Геос-1м представлена на рис. 5.

Мал. 5. Сполучений ГЛОНАСС / GPS-приймач Геос-1м
На відміну від Геос-1, який встановлюється в апаратуру користувача автономно і з'єднується з платами користувача кабелями, приймач Геос-1м є модуль для поверхневого монтажу. Модуль безпосередньо розпаювали на призначену для користувача друковану плату в рамках єдиного циклу її монтажу. Габаритні розміри Геос-1м 35х35х3 мм (тобто на 47% менше Геос-1). Варіант виконання один - два канали RS-232 і зовнішній батарейний джерело. Споживана потужність, в порівнянні з Геос-1, також знижена і становить 350 мВт в режимі стеження.
Технічні характеристики модуля і його структура (за винятком відсутності USB-порту) аналогічні наведеним для Геос-1.
Обидва приймача є виробами цивільного призначення. Висока чутливість приймача і швидкість визначення координат в сукупності з малими габаритами і низькою споживаною потужністю забезпечують їх успішне застосування в бортовій апаратурі різних системмоніторингу транспорту.
Протоколи видачі навігаційної інформації
Приймачі забезпечують два способи обміну навігаційною інформацією: символьний протокол NMEA 0183 v.3.01 і власний бінарний протокол обміну. Дані в обох протоколах видаються приймачем одночасно, але кожен - по своєму каналу. За замовчуванням, по каналу №0 видаються дані бінарного протоколу, по каналу №1 - NMEA. Використовуючи відповідну команду бінарного протоколу, можна перепрісвоіть інформаційні протоколи іншим комунікаційним каналам, тобто бінарний протокол буде видаватися по каналу №1, а NMEA - по каналу №0. Каналом USB можуть передаватися дані тільки одного з протоколів.
Протокол NMEA (National Marine Electronics Association) - повна назва «NMEA 0183» - символьний протокол зв'язку навігаційного обладнання між собою. Використовується майже у всіх GPS-приймачах через свою простоту. Оскільки приймач має послідовний інтерфейс RS-232, то «спілкуватися» з ним можна, підключивши його, наприклад, до IBM PC-сумісного комп'ютера (погодивши, природно, рівні сигналів, швидкість передачі і формат посилки). Оскільки формат даних символьний, то переглядати і «розшифрувати» повідомлення користувач може (при деякому навику), використовуючи будь-яку термінальну програму (в найпростішому випадку програму «HyperTerminal», що входить до складу ОС Windows), що не розробляючи спеціального програмного забезпечення.
Протокол NMEA не передбачає посилку запитів в приймач. Приймач автоматично генерує певний набір повідомлень, передбачений вбудованим програмним забезпеченням. Формат пакетів приймача Геос-1 і їх докладний описнаведені в документі «Геос-1. Інструкція з експлуатації .
Власний бінарний протокол. Як правило, виробник навігаційних приймачів на додаток до протоколу NMEA пропонує власний протокол, що забезпечує:
- Можливість налаштування режимів роботи приймача;
- Отримання розширеної навігаційної (в порівнянні з NMEA) інформації;
- Отримання інформації у відповідь на запити, що посилаються в приймач.
Формат передачі, як уже зазначалося, бінарний (тобто, двійковий) - значення конкретного параметра передається не в ASCI-кодах, а вигляді двійкового числа; формати в термінах мови C (byte, short, int, float, double і інші), що обирається в залежності від розрядності і способу представлення даних. Таким чином, перегляд повідомлень на комп'ютері можливий, але найпростіші термінальні програми непридатні - для «дешифрування» необхідно використовувати спеціальні програми.
Додаткова інформація може включати в себе повідомлення про альманахах, ефемеридах, вимірювальну інформацію від супутників, дані про становище як в географічних (широта, довгота, висота), так і в геоцентричних (відстані X, Y, Z від центру геоїда) координатах. Можливі тонкі настройки приймача (наприклад, виключення і включення конкретного супутника з розрахунку положення) та інші функції.
У загальному випадку протокол містить ряд пакетів беззапитним повідомлень (тобто, повідомлень, які надсилаються приймачем автоматично по мірі їх формування), пакети установок, запитів і команд, які приймаються приймачем від контролера і відповіді на установки, запити та команди, які відсилаються приймачем в контролер.
Повний перелік пакетів бінарного протоколу, їх формат і опис також наведені в.
Плати комутації та програмне забезпечення GeoSDemo
Для демонстрації роботи приймачів розроблені плати комутації (відповідно, GeoS-1 DemoKit і GeoS-M DemoKit, представлені на малюнку 6) і програмне забезпечення для персонального комп'ютера GeoSDemo.

Мал. 6. Плати комутації GeoS-1 DemoKit і GeoS-M DemoKit
Плата комутації здійснює такі функції:
- Формування основного напруги живлення 3,3 В з вхідної постійної напруги 5 ... 30В;
- Підключення зовнішнього резервного джерела напруги (батарейки) до приймача (для варіантів виконання з зовнішньої батареєю) і можливість його відключення (для використання варіантів виконання з батарейним джерелом живлення, встановленим на платі);
- Перетворення стандартних рівнів сигналів RS-232 в рівні LVTTL і назад;
- Підключення до портів USBі RS-232 персонального комп'ютера;
- Комутацію вхідного напруги живлення від зовнішнього джерела або через роз'єм USB;
- Буферірованіе і висновок на ВЧ-роз'єм секундної мітки часу 1PPS;
- Індикацію наявності напруги 3,3 В і активності портів RS-232.
Плата комутації здійснює під'єднання приймача до зовнішнього обладнання (джерела живлення, портам USB / RS-232 комп'ютера).
Програмне забезпечення GeoSDemo є демонстраційним програмним забезпеченням приймачів GeoS-1 і GeoS-M.
Програма дозволяє:
- Виробляти автоматичне або ручне з'єднання з приймачем по послідовним портам RS-232 і USB;
- Відображати вихідну навігаційну інформацію приймача, в тому числі і в графічному вигляді;
- Формувати і посилати в приймач команди, запити та установки;
- Відображати відповіді приймача на команди, запити та установки;
- Здійснювати запис вихідної інформації в лог-файли;
- Зчитувати записаних раніше лог-файлів;
- Формувати і записувати протокол роботи приймача;
- Виробляти оновлення програмного забезпечення приймача;
На малюнку 7 представлено основне вікно програми GeoSDemo.
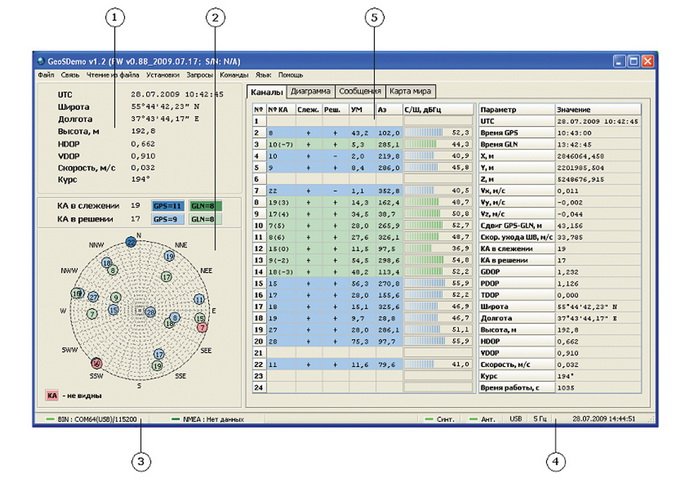
Мал. 7. Основне вікно програми GeoSDemo
Поле 1 містить інформацію про дату і час, географічні координати і висоту, значення геометричного фактора DOP в площині і по висоті, швидкість і курс носія.
В поле 2 розміщена карта положення супутників, а також інформація про супутниках GPSі ГЛОНАСС, що відслідковуються приймачем ( «КА в стеженні») і беруть участь в розрахунку ( «КА в рішенні»). Також на карті відображаються супутники, кут піднесення яких нижче мінімального.
В поле 3 основного вікна розташована статусна рядок, в лівій частині якої відображаються статус підключення і параметри COM-портів ПК (номер і швидкість обміну), налаштованих на прийом даних бінарного і NMEA протоколів. Напис «USB» праворуч від номера COM-порту означає, що підключення вироблено через віртуальний COM-порт, який створюється драйвером USB.
В поле 4 відображаються системна дата і час комп'ютера відповідно до регіональних настройками і статус апаратної телеметрії приймача. Індикатор «Сінт.» показує стан телеметрії синтезатора частоти приймача, а індикатор «Ант.» - стан телеметрії напруги живлення антени.
В поле 5 основного вікна розміщена панель, яка містить набір з чотирьох вкладок: «Канали», «Діаграма», «Повідомлення» та «Карта світу».
Більш детальна інформація про програму, а також процедури збереження і завантаження альманахів, ефемерид, завдання і збереження програмних налаштувань в Flash-пам'яті приймача наведені в документах.
висновок
На даний момент часу ГЛОНАСС наближається до того стану, який дозволить вважати його повноцінним навігаційною системою, здатною виконувати заявлені функції навіть без підтримки супутників інших навігаційних систем.
Особливий інтерес представляє очікуваний в 2010 році запуск третього покоління супутників «ГЛОНАСС-К» з заявленим терміном служби 10 років. Поява сигналів третього діапазону L3 дозволить більш ніж в два рази підвищити точність визначення місця розташування. І, нарешті, менша маса самого супутника дозволить запускати його з космодрому "Плесецьк" (а не з Байконура, як було раніше) з іншими розгінним блоком і ракетою-носієм, що призведе до зниження вартості виведення на орбіту приблизно в два рази.
література
- Соловйов Ю.А. Системи супутникової навігації. - М .: Еко-Трендз, 2000..
- Глобальна супутникова радіонавігаційна система ГЛОНАСС. Під ред. В.Н.Харісова, А.І.Перова, В.А.Болдіна. - М .: ІПРЖР, 1988.
- Яценків В.С. Основи супутникової навігації. системи GPS NAVSTAR і ГЛОНАСС. - М .: Гаряча лінія- Телеком, 2005.
- Стаття «Запуски ГЛОНАСС» на сайті
http://ru.wikipedia.org/. - Самкова Е. Огляд ринку навігаційних пристроїв // Вбудовувані системи, №3 2009.
- Федеральна цільова програма «Глобальна навігаційна система» від 20.08.2001 // сторінка в Інтернеті
http://www.aggf.ru/proekt/zakon/doc.php?zakID=2. - Постанова Уряду Російської Федерації від 25 серпня 2008 «Про оснащення транспортних, технічних засобів і систем апаратурою супутникової навігації ГЛОНАСС або ГЛОНАСС / GPS» // сторінка в Інтернеті
http://www.aggf.ru/proekt/zakon/doc.php?zakID=6. - Геос-1. Інструкція з експлуатації. Версія 1.1.// документ компанії «Геостар Навігація»
http://www.geostar-navigation.com/fail/manuals/User_Manual_GeoS-1_rus.pdf. - GeoSDemo. Інструкція користувача. Версія 1.2.// документ компанії «Геостар Навігація»
http://www.geostar-navigation.com/fail/geosdemo/User_Manual_GeoSDemo_1_2_rus.pdf.