Супутникові системи зв'язку. Супутникові системи навігації
Надіслати свою гарну роботу до бази знань просто. Використовуйте форму, розташовану нижче
Студенти, аспіранти, молоді вчені, які використовують базу знань у своєму навчанні та роботі, будуть вам дуже вдячні.
Розміщено на http://www.allbest.ru/
Реферат на тему:
Виконав: студент 2 курсу,
спец. землеустрій
Брянський М.С.
Перевірив: Іванова Т.І.
Іркутськ 2011
Вступ
2.2 Супутникова система GPS
4. Сучасні геодезичні супутникові приймачі
Вступ
У цьому рефераті розглядається глобальні супутникові системи, їх призначення, види та принцип дії.
Системи позиціонування дозволяють підвищити продуктивність у польовій геофізиці: камеральних, польових та геодезичних робіт. Нові системи керування транспортом, розроблені за останні роки, дозволяють оператору бачити створений комп'ютером об'єкт і оновлювати інформацію про нього. Це все та багато іншого принесли розробки останніх років у геодезію.
1. Виникнення супутникових систем навігації
Поява штучних супутниківЗемлі здійснило переворот у методах геодезії та значно підвищило точність навігації та визначення положення точок та об'єктів на поверхні Землі.
Супутникова геодезія, орієнтована виконання точних геодезичних вимірів на земної поверхні з допомогою штучних супутників Землі (ІСЗ), виникла наприкінці 50-х, безпосередньо після запуску перших ШСЗ.
Період до 1970 р. характеризувався розвитком основних методів супутникових спостережень, в основному фотографування супутників за допомогою спеціально розроблених камер, а також методів обчислення та аналізу супутникових орбіт. Тоді ж було зроблено перші спроби побудови глобальних геодезичних мереж із використанням пасивних ШСЗ. Значну увагу приділили цьому вивченню глобального гравітаційного поля Землі.
Період часу з 1970 по 1980 рік відрізнявся розробкою таких нових засобів та методів спостережень, як лазерні методи вимірювання відстаней до супутників та супутникова альтиметрія. Великим науковим та практичним досягненням є розроблені на той час доплерівські супутникові системи Цикада ( радянський Союз) та Транзит (США). Підвищення точності супутникових вимірів відкрило можливість детальнішого вивчення швидкості обертання Землі, закономірностей руху її полюсів, деформацій земної кори та інших параметрів.
З 1950 року йде широкомасштабне практичне використання супутникових технологій у геодезії, геодинаміці, топографії, землеустрій та інших суміжних областях. Це пов'язано перш за все з подальшим удосконаленням радіонавігаційних систем, що виразилося у використанні досконаліших методів вимірювання, більш вдалих параметрів орбіт, цілого ряду інших технічних рішень, а також із загальним розвитком комп'ютерних технологій. Ті, хто дозволив створити високоавтоматизовані польові геодезичні прилади. Створені і цьому етапі функціональні радіонавігаційні системи ГЛОНАСС (Радянський Союз) і Навстар (СІТА) дозволили продати мм рівень точності При вимірюванні до тисячі і більше км.
У 1963 р. розпочалися роботи з побудови першої вітчизняної низькоорбітальної навігаційної супутникової системи «Цікада». У 1967 р. на орбіту вивели перший вітчизняний навігаційний супутник «Космос-192». Для радіонавігаційних супутникових систем першого покоління характерним є застосування низькоорбітальних ШСЗ та використання для вимірювання навігаційних параметрів об'єкта одного сигналу, видимого в даний момент супутника.
На цій основі в інтересах навігаційного забезпечення у 1964 р. було створено доплерівську супутникову радіонавігаційну систему першого покоління «Transit», призначену для навігаційного забезпечення пуску з підводних човнів балістичних ракет «Поларис». Після того, як у 1967 р. ця система була надана для комерційного використання, кількість громадянських споживачів швидко перевищила кількість військових.
Так само, як і в системі «Цікада», у системі «Transit» координати джерела обчислюються за доплерівським зсувом частоти сигналу одного з 7 видимих супутників, які мають кругові полярні орбіти з висотою над поверхнею Землі ~ 100 км. Період звернення супутників «Transit» дорівнює 107 хвилин.
У 1964 р. в США почалося дослідження можливостей використання для цілей визначення широкосмугових сигналів, модульованих псевдовипадковими шумовими кодами, що на основі кореляційного поділу таких сигналів давало можливість використання кількома передавачами однієї несучої частоти.
Російська супутникова система ГЛОНАСС -- глобальна навігаційна супутникова система, розробки якої розпочато середині 1970-х років, а 1995 р. Уряд РФ спеціальною постановою за № 237 відкрило систему цивільного застосування та міжнародного співробітництва. Методика, що використовується, вимагає знаходження в будь-який момент часу в полі зору кожного користувача не менше 4 супутників, тому висоти орбіт і кількість супутників у системах другого покоління значно збільшені. Розгортання першої фази системи, що передбачає використання 10-12 ШСЗ у двох площинах, завершилося в 1991 р. У лютому 1992 р. кількість працюючих одночасно супутників вперше досягла 12. В даний час (2006 р.) кількість працюючих супутників ГЛОНАСС становить 17.
У Російської Федераціїна використання супутникових приймачів глобального позиціонування введені обмеження - їх застосування потрібна ліцензія. Основним розробником і творцем у системі загалом і з космічному сегменту є НУО прикладної механіки (м. Красноярськ), а, по навігаційним космічним апаратам - ПО «Політ» (м. Омск). Головним розробником радіотехнічних комплексів є РНДІКП; відповідальним за створення тимчасового комплексу, системи синхронізації та навігаційної апаратури споживачів визначено Російський інститут радіонавігації та часу.
2. Глобальні навігаційні супутникові системи
Глобальна навігаційна супутникова система (Global Navigation) Satellite System- GNSS) - це супутникові системи (найбільш поширені, що використовуються для визначення місця розташування в будь-якій точці земної поверхні із застосуванням спеціальних навігаційних або геодезичних приймачів. GNSS-технологія знайшла широке застосування в геодезії, міському та земельному кадастрі, при інвентаризації земель, будівництві інженерних споруд, у геології тощо.
Найбільш перспективними космічними системами, службовцями для вирішення геодезичних завдань, є системи глобального позиціонування ГЛОНАСС (РФ), GPS (США) і Galileo (європейська система). Ці системи є виключно точним інструментом для вирішення прикладних завдань геодезії, геофізики та землекористування. Вони призначені для високоточного визначення трьох координат місця, що становлять вектор швидкості і часу різних рухомих об'єктів.
Функціонуючими на даний момент є дві глобальні супутникові радіонавігаційні системи другого покоління:
· Російська (раніше радянська) система ГЛОНАСС (глобальна навігаційна супутникова система)
· американська, звана "Navstar" (Navigational Satellite Time and Ranging - навігаційний супутник вимірювання часу та координат) або за її фактичним призначенням GPS (Global Positioning System - глобальна система визначення місцезнаходження).
Супутникові системи, крім навігаційних визначень, дозволяють проводити високоточну взаємну синхронізацію стандартів частоти та часу на віддалених наземних об'єктах та взаємну геодезичну прив'язку, а також визначати орієнтацію об'єкта на основі вимірювань, що виробляються від чотирьох приймачів сигналів навігаційних супутників.
Основними перевагами супутникового позиціонування є всепогодність, глобальність, оперативність, точність та ефективність. Ці якості залежать від балістичної побудови системи, високої стабільності бортових еталонів частоти, вибору сигналу та способів його обробки, а також способів усунення і компенсації похибок. Параметри систем та їх окремих елементів, а також математичне забезпечення вибираються так, щоб помилка навігаційних визначень координатами була не більше 10 м, а за швидкістю до 0,05 м/с.
Сучасні системи супутникового позиціонування складаються з трьох частин, що отримали назву секторів (підсистем):
· Космічний сектор, що включає набір супутників, який називають «сузір'ям»;
· Сектор управління і контролю, що складається з центральної (провідної) станції та декількох станцій стеження, розташованих у різних точках земної кулі. Крім того, є засоби розгортання та поповнення системи (космодром);
· Сектор користувачів, що включає в себе широко поширену апаратуру користувачів.
Сектор споживача
Сектор споживача є комплектом супутникового обладнання, який дозволяє отримувати координати пункту спостережень, точний час, а також швидкість і напрямок переміщення об'єкта. Під час роботи здійснюється прийом радіосигналів із супутників, реєструються зумовлені величини, проводиться попередня обробка результатів безпосередньо в польових умовах і потім у камеральних умовах виконується остаточна обробка (так звана «пост-обробка») матеріалів, що дозволяє отримати остаточні значення величин, що цікавлять споживача.
Супутникова апаратура може бути використана для військових цілей і тому має працювати оперативно та надійно за умов проведення військових дій. У цьому створюються умови, у яких використання системи позиціонування було недоступне потенційного противника. Цивільне застосування супутникової апаратури орієнтоване на її використання у навігації, а також у геодезії.
2.1 Супутникова система ГЛОНАСС
Технічні характеристики супутникової системи ГЛОНАСС
Система ГЛОНАСС вважається системою подвійного призначення, тобто може використовуватися як у військових, так і цивільних цілях, і розроблена на замовлення Міністерства оборони. За своїм призначенням та побудовою система ГЛОНАСС подібна до американської Navstar і за вихідними показниками не поступається їй. Система ГЛОНАСС є беззапитової, тому кількість споживачів системи не має значення.
Супутники системи ГЛОНАСС доставляються на робочу орбіту 4-ступінчастими носіями "Протон" по 3 штуки в одному пуску. При початковому періоді звернення 675 хвилин супутники дрейфують уздовж робочої орбіти до призначених точок розташування, де стабілізуються за допомогою бортового двигуна, доводячи період звернення до 675,7 хвилини. Висота орбіти - 19100 км, спосіб (кут, утворений площиною орбіти і площиною екватора) - 64,8 °, період звернення - 11 год. 15 хв. 44 с. Орбіти є кратними та забезпечують повторення наземної траси кожного супутника через 8 діб після завершення ним 17 витків. Це має певні переваги на початковому етапіколи задіяні ще не всі орбітальні площини та місця розташування супутників. Крім того, набагато рідше доводиться коригувати орбіти.
ГЛОНАСС дозволяє створювати суцільне навігаційне поле над поверхнею Землі до висоти 2000 км, перебуваючи всередині якого споживач у будь-який момент часу може прийняти радіонавігаційні сигнали не менше ніж від чотирьох супутників. Час експлуатації супутника першого покоління ГЛОНАСС-М - 5 років, за цей час параметри його орбіти не повинні відрізнятися від номінальних значень більше ніж на 5%. Сам супутник важить до 1415 кг і є герметичний контейнер діаметром 1,35 м і довжиною 7,84 м, всередині якого розміщується апаратура.
Кожен супутник побудований на основі використання герметичного відсіку приладів. Всередині відсіку за допомогою активного газового контуру, системи жалюзі з електроприводами та набору обігрівачів, що керуються, підтримуються комфортні умови за температурою в діапазоні 0-40 °С. Там, де розміщено блоки стандартів частоти, створено зону термостабілізації в межах ±1 °С. Всі тепловиділяючі прилади цільової апаратури розміщені поза герметичним приладовим блоком на антеному модулі в зонах, що не засвічуються Сонцем.
Система корекції, що використовує рухову установку, працює після виведення КА на орбіту в процесі приведення його в системну точку і дозволяє утримувати КА в заданих межах (±5° за аргументом широти) без подальших корекцій протягом усього терміну функціонування КА. Орієнтація поздовжніх та поперечних осей космічного апарату, а також сонячних батарей забезпечується за допомогою електромаховиків, що періодично розвантажуються електромагнітами.
На другому етапі модернізації «сузір'я» ГЛОНАСС використовується космічний апарат «ГЛОНАСС-К», який має такі відмінні риси в порівнянні з «ГЛОНАСС-М»:
· введено третю частоту в L-діапазоні для підвищення точності та надійності навігаційних визначень споживачів;
· Термін активного існування КА збільшений до 10 років;
· Маса КА зменшена приблизно в 2 рази;
· Розміщується додаткова корисне навантаження, У т. ч. апаратура порятунку зазнають лиха.
Космічний апарат (КА) «ГЛОНАСС-М» може виводитися за груповою схемою 3 КА одночасно з космодрому Байконур з використанням ракети-носія «Протон» («Протон-М») та за одиночною схемою з космодрому Плесецьк з використанням ракети носія «Союз- 2».
Як уже зазначалося, в даний час кількість супутників ГЛОНАСС, що працюють, становить 17. До кінця 2006 р. будуть запущені ще три супутники «ГЛОНАСС-М», а в 2007 р. - ще три супутники. У 2008 р. планується провести випробування супутника нового покоління «ГЛОНАСС-К», який має меншу масу, найкращі характеристикита гарантований термін роботи на орбіті 10-12 років.
2.2 Супутникова система GPS
GPS (Global Positioning System) - що забезпечують вимір часу та відстані навігаційні супутники; глобальна система позиціонування), що часто називається GPS. Дозволяє у будь-якому місці Землі (не включаючи приполярні області), майже за будь-якої погоди, а також у космічному просторі поблизу планети визначити місце розташування та швидкість об'єктів. Найбільш використовувана нині є супутникова система GPS (Global Positioning System), з якою пов'язана поява нового терміна - позиціонування (positioning). Під позиціонуванням розуміється визначення розташування об'єкта, швидкості його переміщення, просторового вектора між пунктами спостереження і точного часу визначення його розташування. Розробка цієї системи розпочалася у 1973 р. Експлуатаційна готовність оголошена у 1995 р.
Супутникова система GPS, розроблена для Міністерства оборони США і знаходиться під його керуванням, за своїм функціональним можливостяманалогічна російській системіГЛОНАСС. Навігаційні космічні апарати системи GPS також проходили низку вдосконалень.
В інтересах світової спільноти вона використовується відповідно до особливих положень. США надають систему у стандартному режимі для цивільного, комерційного та наукового використання. За використання системи цивільними споживачами несе відповідальність Міністерство транспорту США.
Основний принцип використання системи - визначення розташування шляхом вимірювання відстаней до об'єкта від точок з відомими координатами - супутників. Відстань обчислюється за часом затримки поширення сигналу від посилки супутником до прийому антеною GPS-приймача. Тобто для визначення тривимірних координат GPS-приймачу потрібно знати відстань до трьох супутників і час GPS системи. Таким чином, для визначення координат та висоти приймача, використовуються сигнали як мінімум з чотирьох супутників.
2.3 Супутникова система Galileo
Галілео (Galileo) - спільний проект Європейського Союзу та Європейського космічної агенціїСупутникова система навігації є частиною транспортного проекту Трансєвропейських мереж (Trans-European Networks). Система призначена для вирішення навігаційних завдань для будь-яких рухомих об'єктів із точністю менше одного метра. Нині існуючі GPS-приймачіне зможуть приймати та обробляти сигнали з супутників Галілео, хоча досягнуто домовленості про сумісність та взаємодоповнення із системою NAVSTAR GPSтретього покоління. Фінансування проекту буде здійснюватись у тому числі за рахунок продажу ліцензій виробникам приймачів.
Крім країн Європейського союзу досягнуто домовленості щодо участі у проекті з державами -- Китай, Ізраїль, Південна Корея, Українаі РосіяОкрім того, ведуться переговори з представниками Аргентини, Австралії Бразилії, Чилі, Малайзії. Очікується, що «Галілео» увійде в дію в 2014-2016 роках, коли на орбітубудуть виведені усі 30 запланованих супутників(27 операційних та 3 резервних). Компанія Arianespace уклала договір на 10 ракет-носіїв Союз» для запуску супутників починаючи з 2010 року. Космічний сегментбуде доповнений наземною інфраструктурою, що включає три центри управління і глобальну мережу передавальних і приймаючих станцій.
На відміну від американської GPSта російською ГЛОНАСС, система Галілео не контролюється національними військовими відомствами, однак, у 2008 році парламент ЄС ухвалив резолюцію «Значення космосу для безпеки Європи», згідно з якою допускається використання супутникових сигналів для військових операцій, що проводяться в рамках європейської політики безпеки. Розробку здійснює Європейське космічне агентство. Загальні витрати на створення системи оцінюються у 4,9 млрд євро.
Станом на 19 січня 2011 року, для остаточного завершення європейського проекту створення системи супутникової навігації Galileo не вистачає 1,9 млрд євро. Про це заявив на брифінгу в Страсбурзі віце-президент Єврокомісії, відповідальний за питання промисловості та підприємництва Антоніо Тайані, представляючи проміжну доповідь про створення системи.
супутник геодезія орбіта
3. Супутникова геодезична апаратура
Складається із цілого набору аксесуарів. У комплект одного супутникового приймача входять: антена, приймач, контролер (керуючий пристрій), блок живлення (для зарядки акумуляторів та живлення від мережі), акумулятори або батареї, кабелі, штатив або віша, а також пристрої кріплення або встановлення антени на них, рюкзак або кейс, чохли та ін. При роботі в режимі реального часу повинен бути радіомодем з блоком живлення та радіоантеною. Для обробки результатів спостережень необхідний комп'ютер та програмне забезпечення. В даний час супутникові приймачі випускає більше 400 фірм, і вони характеризуються порівняно великою різноманітністю, але відмінні особливості приймальних пристроїв, що випускаються різними фірмами, здебільшого носять непринциповий характер.
3.1 Технічні характеристики геодезичного супутникового обладнання
При виконанні геодезичних вимірів на земній поверхні в основному використовуються, теодоліти нівеліриі електронні тахеометри. Всі ці прилади досягли досить великої досконалості та працюють в оптичному діапазоні електромагнітних хвиль. Подальше підвищення точності геодезичних вимірів переважно обмежене впливом атмосфери, а чи не технічними можливостями високоточних приладів. Подальше підвищення точності наземних геодезичних вимірів за допомогою традиційних геодезичних приладів можливе лише за умови використання методів вимірів, що враховують вплив атмосфери.
Інший шлях підвищення ефективності геодезичних вимірів - використання супутникових методів вимірів із застосуванням як опорні точки миттєвих положень штучних супутників Землі.
При розробці методів супутникових вимірювань розглядалися такі методи, як супутникова тріангуляція, заснована на використанні кутових вимірювань, та супутникова трилатерація, заснована на використанні лінійних вимірювань.
З використанням супутникової тріангуляції, починаючи з запуску першого радянського штучного супутника Землі, застосовувався метод фотографування супутників і натомість зірок. За цими знімками у поєднанні з відповідними фотограмметричними методами отримували необхідну інформацію про орієнтирні напрямки, що використовуються при побудові глобальної геодезичної мережі. Цей метод забезпечував порівняно невисоку точність вимірів. При спостереженнях потрібно було чисте небо щонайменше у двох точках, рознесених великі відстані; крім того, апаратура була дорогою та важкою. З цієї причини вказаний метод був витіснений супутниковою трилатерацією, яка застосовується і зараз.
Супутникову трилатерацію можна, наприклад, виконувати за допомогою далекомірів, що працюють в оптичному діапазоні.
Оптичні далекоміри, у яких як випромінювач використовують лазер, забезпечують значну дальність вимірювань і високу точність, але вони досить дорогі, громіздкі і вимагають хорошої видимості в момент спостережень. З цієї причини вони знаходять обмежене застосування і в основному використовуються на пунктах спостережень в наземному космічному секторі управління та контролю для уточнення орбіт супутників, визначення довжин високоточних базисів та ін. для яких відбиваючим об'єктом є супутник.
Крім того, були створені супутникові альтиметри, наприклад, «Geosat», «ERS» та ін., які встановлювалися на супутнику, а як поверхню, що відбиває, використовувалася земна поверхня.
Інший напрямок пов'язані з використанням радіосистем. При цьому було враховано досвід створення доплерівських радіодалекомірних систем, таких як Декка, Хіран, Транзит, Цікада. Для підвищення точності радіодальномірних систем використали фазовий метод вимірювань.
4. Сучасні геодезичні супутникові приймачі
Сучасні супутникові приймачі мають програму, яка аналізує відносне положення всіх доступних для спостереження супутників і вибирає з них чотири, найкраще розташовані, які і використовуються для визначення координат точки. Точніші результати отримують, коли виконують обробку виміряних відстаней до всіх супутників, що знаходяться в полі зору. Тому одним із найважливіших напрямів удосконалення та розвитку супутникової радіонавігації є спільне використання сигналів ГЛОНАСС та GPS, а в майбутньому – Galileo. Основні цілі цього процесу - підвищення точності та надійності (доступності, безперервності обслуговування та цілісності) навігаційних визначень.
За складністю технічних рішень та обсягом апаратних витрат супутникові приймачі поділяють на:
· одноканальні (у тому числі мультиплексні, приймач дуже швидко перемикається між сигналами орбітального угруповання), які в кожний поточний момент часу ведуть прийом та обробку радіосигналу тільки одного супутника, та
багатоканальні, що дозволяють одночасно приймати та обробляти сигнали кількох супутників.
Нині переважно випускаються багатоканальні приймачі.
Крім того, приймачі можна розділити на односистемні, що приймають сигнали GPS, і двосистемні, що приймають сигнали ГЛОНАСС та GPS. Залежно від виду приймаються та оброблюваних сигналів приймачі поділяються на:
· Одночастотні, кодові, що працюють за С/А-кодом;
· Двочастотні, кодові;
· Одночастотні кодово-фазові;
· Двухчастотні кодово-фазові.
Кодові приймачі (handheld) призначені для визначення тривимірного положення точки, швидкості та напряму руху. Вони дозволяють визначати планове положення точки, як правило, з точністю до одиниць м, а висотне положення визначається з точністю близько 10 м (двочастотні кодові приймачі забезпечують субметрову точність). Для підвищення точності висотних вимірів у них вбудовують баровисотомір. Ці приймачі зручні при виконанні польових географічних і геологічних робіт, оскільки на екрані можна відобразити карту маршруту, визначати своє розташування, відстань, напрямок та час прибуття до мети. Отримані результати можуть накопичуватися та зберігатися в пам'яті приладу, а потім вводитись у комп'ютер для подальшої обробки. Ці приймачі мають малі габарити та масу, працюють у широкому діапазоні температур та малоенергоємності.
Сучасні GNSS приймачі дозволяють працювати із системами ГЛОНАСС та GPS, одночасно приймаючи сигнал по універсальних каналах, що підвищує точність та продуктивність виконуваних робіт. За останні кілька років системи високоточного супутникового позиціонування стали невід'ємною частиною геодезичних та маркшейдерських робіт. Ці системи (ГІС GPS/Глонасс) використовуються під час створення опорного геодезичного обґрунтування, детальних топографічних зйомок, винесення проекту в натуру тощо. Застосування систем супутникового позиціонування (GNSS/Glonass) дозволяє суттєво підвищити точність та продуктивність польових та камеральних геодезичних робіт, що значно покращує якість геодезичного та маркшейдерського забезпечення підприємств. Визначення просторових координат у режимі реального часу надає такі додаткові можливості автоматизації таких процесів, як розбивка будівельних сіток, геодезичний моніторинг інженерних споруд (висотні будівлі, мости, греблі тощо), спостереження за просторовим становищем великих промислових механізмів. Компанія Leica Geosystems (Швейцарія) розробила нову серію Глонасс/GPS обладнання - Leica Viva GNSS. Відмінною рисою цієї серії є здатність приймати сигнали від супутників як існуючих, так і проектованих ДПСС на всіх частотах (в т.ч. L5 системи GPS, GLONASS, Alt-Boc системи Galileo та ін.). Для якісної роботи супутникової апаратури з гарантовано надійним прийомом сигналів супутників GNSS у будь-яких умовах були розроблені та запатентовані технології SmartTrack+, SmartCheck+ та SmartRTK.
Основним завданням, яке вирішується за допомогою GPS у геодезії, є створення та реконструкція опорних та знімальних мереж, а також великомасштабна топографічна зйомка великих територій, винесення в натуру проекту та ін. У цих умовах важливим є питання вибору пунктів державної геодезичної мережі, від яких здійснюватиметься прив'язка опорної геодезичної мережі. Як показують дослідження, краще використовувати пункти державної геодезичної мережі вищого класу, розташовані на відстані 5-15 км від промислових підприємств. Це пов'язано з тим, що пункти мережі, що базуються поблизу промислових об'єктів, перебувають у зоні впливу техногенних чинників.
Однією з основних характеристик для польового геодезичного устаткування є рівень його захищеності. Обладнання Leica Viva GNSS має систему захисту, сертифіковану за Європейськими стандартами. Система гарантує повний захист від пилу та 100% конденсованої вологи (IP67), робоча температура становить від -40°С до +65°С. Прилади витримують короткочасне занурення у воду на глибину до 1 м-коду, падіння з висоти 1,5 м-коду на тверді поверхні, а також забезпечують роботу без втрати сигналу в умовах сильної вібрації.
· Супутниковий приймач ІГ-3К
Першимсупутниковим приймачем із вбудованим мікробаронівеліром, створеним для робіт на закритих територіях (у лісі), можна назвати ІГ-3К
· Двосистемний кодовий навігаційний приймач СН-4001
В останні роки фірми, що випускають портативні супутникові (персональні)приймачітипу Гармін, Магеллан та ін, також почали оснащувати портативні супутникові приймачі барометричними альтиметрами. Точність визначення планових координат такими приймачами за супутниковими спостереженнями становить 3-5 м, а висот, що вимірюються автономно барометричним альтиметром - близько 3 м, тобто вище, ніж визначення висот з автономних супутникових спостережень.
· Двосистемний геодезичний приймач ГЕО-161
У геодезичних роботах в основному використовуються кодово-фазові двочастотні та одночастотні приймачі. В останні роки з них все більшого поширення мають двосистемні приймачі, що забезпечують більш високу точність і надійність вимірювань.
Розміщено на Allbest.ru
Подібні документи
Стан впровадження ATN у практику повітряного руху. Супутникові інформаційні технологіїу системах CNS/ATM. Супутникові радіонавігаційні системи. Координати, час, рух навігаційних супутників. Формування інформаційного сигналу GPS.
навчальний посібник, доданий 23.09.2013
Регіональні супутникові навігаційні системи: Бейдау, Галілео, індійська та квазізенітна. Принцип роботи та основні елементи: орбітальне угруповання, наземний сегмент та апаратура споживача. Створення карток для навігаційних супутникових систем.
курсова робота , доданий 09.03.2015
Вивчення функціонування систем зв'язку, які можна розділити на радіорелейні, тропосферні, супутникові, волоконно-оптичні. Вивчення історії виникнення, сфери застосування систем зв'язку. Супутникові ретранслятори, магістральний супутниковий зв'язок.
реферат, доданий 09.06.2010
Супутникові навігаційні системи, що використовуються. Надійність, обсяги обладнання локомотивів та мережі референцних станцій. Принцип роботи терміналу. Правила та норми щодо обладнання локомотивів засобами радіозв'язку та перешкодно-задавлюючими пристроями.
курсова робота , доданий 25.02.2016
Принципи функціонування супутникових систем навігації. Вимоги до СНР: глобальність, доступність, цілісність, безперервність обслуговування. Космічний, управлінський, споживчий сегменти. Орбітальна структура NAVSTAR, ГЛОНАСС.
доповідь, доданий 18.04.2013
Супутникова система навігації як комплексна електронно-технічна система, її структура та зміст, призначення та функціональні особливості. Склад апаратури користувача та правила її застосування. Принцип дії GPS та ступінь точності сигналу.
курсова робота , доданий 16.11.2010
Навігаційні виміриу багатоканальній НАП. Структура навігаційних радіосигналів у системі ГЛОНАСС та GPS. Точність глобальної навігації рухомих наземних об'єктів. Алгоритми прийому та вимірювання параметрів супутникових радіонавігаційних сигналів.
курсова робота , доданий 13.12.2010
Орбіти супутникових ретрансляторів. Модуляція-демодуляція та завадостійке кодування. Коди Боуза-Чоудхурі-Хоквінгема. Найбільш широко відомі згорткові коди. Протоколи множинного доступу. Проблема статистичного мультиплексування потоків.
контрольна робота , доданий 20.12.2012
Загальна інформація та історія розвитку системи "Глонасс", хронологія вдосконалення. Супутникові навігатори. Точність та доступність навігації. Розробка та серійне виробництво побутових Глонасс-приймачів для споживачів. Двосистемний GPS навігатор.
курсова робота , доданий 16.11.2014
Три різні види супутників: низька, середня навколоземної орбітита геостаціонарні. Класифікація супутників по зоні обслуговування, типу послуг та характеру використання. Переваги геостаціонарної орбіти. Супутники низької та середньої навколоземної орбіти.
Вступ……………………………………………………………………....4
- Основні засади роботи супутникової апаратури.
1.1 Призначення та структура СРНС……………………………………….6
1.2 Основи методики ведення GPS – зйомки……………………………7
1.3 Використовувані приборы……………………………………………...16
1.4 Програмне забезпечення зрівнювання геодезичних мереж……19
підвищення точності прив'язки розпізнавальних значень.
3.3 Гігієнічні вимоги до організації работ…………………..41
3.4 Вплив забруднення атмосфери на точність визначення координат розпізнав…………………………………………………………47 Висновок......................................................................................................49 Програми....................................................................................................51
Список використаної литературы…………………………………….58
ВСТУП
Використання сучасних технологій суттєво розширило рамки вирішення задач навігаційного та геодезичного спрямування. Супутникові радіонавігаційні системи (GPS, ГЛОНАСС) дозволяють здебільшого (порівняно з традиційними методами) досягти вищої точності місце визначення об'єкта з меншими економічними витратами при прив'язці розпізнавань. Вирішення цих завдань необхідне для різноманітних видів наукової та виробничої діяльності людини – від проблем, не тільки пов'язаних із космічними дослідженнями, уточненням координат пунктів геодезичних мереж різного призначення, геодезичного забезпечення геологорозвідувальних, геофізичних, а й будівельних робіт, кадастру та інших. Можливості таких систем зросли на стільки, що поряд з вирішенням завдань визначення геоцентричних координат пунктів на рівні точності близько 1 метра та відносних координат на рівні точності, близької до 1 -2 см, споживачами координатно-часової інформації стають окремі особи, яким необхідно досить точно визначати місцезнаходження. Має під собою реальну основу думка, що у найближчому майбутньому супутникові методи геодезичних визначень різного призначення з використанням РРНЗ у більшості випадків витіснять традиційні класичні. В основу прив'язки розпізнавків закладені як класичні так і сучасні супутникові системи в основі яких є визначення тривимірного положення координат розпізнавань на місцевості та подальше їх закріплення та оформлення таким чином, щоб потім його можна було дешифрувати або розпізнати на сучасних фотограмметричних приладах з метою подальшої обробки знімків. Координати розпізнавків використовуються для створення вихідної геодезичної основи, яка є вихідною інформацією для отримання точних топографічних або фотограмметричних документів. В даний час як у Московській області так і у всій Центральній частині Росії геодезична основа не має достатньої кількості пунктів, на яких можна було спиратися і для створення опорної геодезичної мережі та визначення координат опознаків необхідно мати досить надійну геодезичну основу. Створювати таку основу класичним методом буде економічно не вигідно, оскільки доведеться витратити багато часу та коштів для виконання такої роботи, а головне виграшу точно не буде. Для цих цілей можна використовувати сучасні супутникові технології, які базуються на одночасному визначенні як планових, так і висотних координат, що дуже важливо для уточнення положення розпізнавань на місцевості. Метою даної є дослідження специфіки використання сучасних супутникових засобів підвищення точності прив'язки опознаков.
1. ОСНОВНІ ПРИНЦИПИ РОБОТИ СУПУТНИКОВОЇ АПАРАТУРИ
Виходячи з тематики роботи, цілком доречно навести короткий опис існуючих СРНС та апаратури споживачів, які здобули найбільшу популярність, а також методики застосування супутникової апаратури під час проведення топографо-геодезичних робіт. 1.1 Призначення та структура СРНС 1. СРНС призначені для визначення просторових координат розташування та вектора швидкості користувачів, а також точного часу. 2. Потенційними користувачами РРНЗ є об'єкти цивільної та військової авіації, морські та річкові судна, транспортні системи та споживачі високоточних координат (наприклад, геодезисти). Більшість СРНС структурно складаються із трьох основних частин: сегмент космічних апаратів; сегмент контролю та управління; сегмент апаратури користувачів. Сегмент Космічних Апаратів складається із сузір'я спеціалізованих Навігаційних Супутників (НС) та засобів виведення їх на орбіту. Супутники на борту мають кілька високоточних атомних еталонів частоти і, постійно транслюючи радіосигнали та навігаційні повідомлення, закладені з контрольного сегмента, створюють тим самим підсистеми користувачів єдине глобальне навігаційне поле. Наземний СегментКонтроль та Управління СРНС складається з групи станцій стеження, кількох станцій завантаження повідомлень на НС. та головної станції. Він здійснює моніторинг цілісності системи та є первинним джерелом інформації, що постачається користувачеві. Його основними завданнями є: контроль за роботою супутників, збирання необхідної інформації для визначення та прогнозу орбіт, формування часу системи, та його синхронізації щодо Всесвітнього часу та закладання даних у бортову пам'ять СР. Під сегментом користувачів СРНС розуміється комплекс апаратно-програмних засобів, що реалізує основне призначення СРНС - визначення навігаційних даних на суші, поверхні моря, у повітрі, навколоземному космічному просторі та геодезичних положень на поверхні Землі. Головними факторами широкого використання апаратури користувачів СРНС є її всепогодність, оперативність першого визначення координат (< 3 минут от включения приемника), непрерывность определения координат (каждые 0,5 секунды), малые габариты приемников, простота эксплуатации, достаточно высокая точность и относительно небольшая стоимость. 1.2 Основи методики ведення GPS – зйомкиВиконання геодезичних робіт при використанні GPS-устаткування можна розділити на три основні етапи: планування; польова частина робіт (супутникові спостереження); постобробка результатів вимірів. Планування робіт Під плануванням робіт розуміється як проектування мережі визначених пунктів, а й вибір оптимальних періодів часу доби, найбільш сприятливих з погляду найкращих геометричних показників, розташування сузір'їв супутників і з урахуванням умов закритості (перешкод для проходження сигналів від супутників) визначених точок. Часто планування на поточний та наступні дні достатньо виконувати щодо деякої центральної точки зони передбачуваних денних робіт. Планування здійснюється за допомогою спеціальної програми на персональному комп'ютері з подальшою видачею результатів в алфавітно-цифровій або графічній формі на екрані дисплея або принтера. Ця програмає складовою Загальний програмний пакет. Польова частина робіт Польова частина методики - це знімальні роботи, які проводяться відповідно до планування. Як описувалося вище, вимірювання ведуться в так званому диференціальному режимі, тому для роботи необхідно щонайменше два приймачі з антенами. Існує кілька методик проведення супутникових спостережень. За декількома відмітними критеріями (час спостереження на точці, вимоги до кількості супутників, що відстежуються, надмірність фіксованої інформації, структура запису даних, склад використовуваної апаратури, технології виконуваних процедур) їх можна розділити на дві основні групи: статичні і кінематичні. Статичні зйомки Традиційна статика. Антена одного із приймачів (базового) закріплюється в трегері штатива, після чого нівелюється і центрується над геодезичним пунктом з точно відомими координатами), знання координат базового пункту не є обов'язковим під час проведення вимірювань. Антена іншого приймача (переміщуваного) аналогічно встановлюється на штативі над точкою, координати якої потрібно визначити. При цьому необхідно виміряти та ввести в приймачі висоти антен над пунктами (процес центрування, нівелювання та вимірювання висоти антени необхідний для того, щоб спроектувати базову лінію, що фактично вимірюється між фазовими центрами антен, на реальні геодезичні точки). Далі обидва приймачі, натиснувши кілька клавіш, перетворюються на режим «статична зйомка». Накопичення інформації відбувається або у внутрішню (енергонезалежну) пам'ять приймача, або на змінні магнітні картки протягом від 25 до 60 хвилин і більше в залежності від кількості супутників, що спостерігаються, і довжини базової лінії. Об'єм пам'яті приймача (може бути збільшений за бажанням користувача) розрахований в середньому на 20 - 50 годин безперервних вимірювань. Протягом сеансу спостережень допустимі тимчасові втрати сигналів супутників. Мінімальна кількість супутників при веденні вимірювань статичним методом - 3. Середня продуктивність 7 -10 (до 20) точок на день на один приймач, що переміщується в залежності від зовнішніх умов, часу затрачуваного на переїзди між точками, що визначаються, і досвіду роботи персоналу. "Швидка" статична зйомка (тільки для двочастотних приймачів). Порядок встановлення антен і ведення вимірювань той же, що і в простій «статиці», але тривалість сеансу спостереження скорочується до 5 - 20 хвилин в залежності від кількості супутників, що відстежуються, і відстані між станціями. Таке значне скорочення часу спостереження стало можливим за рахунок введення додаткових (надлишкових) інформаційних каналів (вимірювання фази несучої та обох кодів на двох частотах) та новітніх алгоритмівобробки двочастотних даних Середня продуктивність - 30-40 пікселів і більше на день залежно від площі робіт. Кінематична зйомка Метод «Stop & Go» (Зупинися та йди). Установка антени на базовій станції аналогічна статичній. Антена приймача, що носиться, закріплюється в спеціальному швидко настановному штативі і центрується над першою точкою, після чого проводиться накопичення інформації (30-40 хв.) в нерухомому стані для ініціалізації (визначення деяких початкових умов) всієї зйомки. Іншими методами виконання ініціалізації є спосіб обміну антенами на вихідних точках або початок вимірювання відомої базової лінії. Потім антена з приймачем (без включення приймача) переноситься на таку точку, що визначається. Після встановлення антени над поточною (будь-якою після першої) точкою інформація накопичується вже протягом 2-3 хвилин. Далі й до закінчення сеансу зйомки повторюються викладені вище кроки. Об'єм пам'яті приймача розрахований на 5-20 годин безперервної зйомки. Метод дуже зручний і ефективний для використання під час кадастрових робіт (наприклад, оконтурювання або розмітка невеликих площ). Основна вимога до зйомки - обов'язкова безперервність прийому сигналів мінімум від 4 супутників під час руху між пунктами (тобто необхідна досить відкрита місцевість). Середня продуктивність цього методу важко визначати. Можливе координування 100 точок і більше на день залежно від площі зйомки, засобів пересування, зовнішніх умов та досвіду персоналу. Найбільш сприятливі результати виходять за віддалення від базової станції на відстанях до 20 кілометрів. Метод "Сontinuous kinematic" (Безперервна кінематика). Початкові установки апаратури аналогічні попередньому типу кінематичної зйомки. Відмінність у тому, що спостереження у разі ведуться без зупинок над визначеними точками. В результаті постобробки створюється каталог координат точок, що відповідають кожному моменту запису вимірювань у пам'ять приймача (інтервалом запису можна варіювати від 0,5 сек. до декількох хвилин в залежності від динаміки зйомки). Даний тип зйомки зручно застосовувати як на рухомому об'єкті, так і в пішому ході для детального оконтурювання площ. Цей метод також може бути використаний для прив'язки центрів знімків при аерофотозйомці. У цьому випадку, один із приймачів встановлюється на літальному апаратіі підключається до реєстратора затвора аерофотокамери для синхронізації їх роботи, а інший використовується як наземна базова станція. У результаті можливе отримання каталогу координат центрів фотографування. Основна вимога до цього типу зйомки - обов'язкова безперервність прийому сигналів щонайменше від 4 супутників (тобто необхідна досить відкрита місцевість). Продуктивність робіт при даному типі зйомки обмежується найчастіше обсягом пам'яті приймача і ємністю елементів живлення. Метод "Real-Time Kinematic" (Кінематична зйомка в реальному масштабі часу). Це найбільш сучасний та перспективний метод ведення кінематичних спостережень. Апаратно додається радіомодем, за допомогою якого з базової станції передаються диференціальні поправки на приймач, що носиться. При цьому на екрані приймача, що носиться, відображаються координати визначених точок з сантиметровою точністю в реальному масштабі часу, тобто. не потрібна постобробка. Цей методефективно застосовується на відстані 10-15 кілометрів від базової станції, і залежить, як правило, від області впевненого прийому сигналів диференціальної корекції. Псевдостатична (псевдокінематична) зйомка. Псевдостатичні процедури можна розглядати як скорочену версію статичного методу або як кінематичну зйомку, для якої потрібно повторне встановлення антени над однією і тією ж точкою. Польова частина псевдостатичної зйомки виконується так само, як і при «кінематиці». Однак вигідною відмінністю є відсутність необхідності безперервного супроводу не менше 4 супутників при русі між точками, що визначаються. Єдина вимога для псевдостатики полягає в тому, що приймач, що носиться, повинен повертатися на кожну станцію, принаймні, двічі, з рознесенням за часом в інтервалі від 1 до 4 годин. Час спостереження на кожній точці становить 5-10 хвилин в залежності від відстані до базової станції та кількості супутників, що відстежуються. Реальна продуктивність 15-25 пікселів на день. Під час ведення всіх видів зйомок можливе: спостереження за якістю відстеження супутників; контроль кількості видимих супутників; поточний контроль пам'яті приймача та його енергоживлення; планування наступного сеансу зйомки; введення польових нотаток з клавіатури приймача чи контролера у внутрішню пам'ять чи магнітні карти; зміна назв станцій та висот антени; Введення метеоданих для їхнього обліку під час постобробки тощо.
Як результат опису методів ведення польових робіт при використанні GPS-приймачів, в таблиці 1.1 наведено оціночні (заявлені фірмами-виробниками) точнісні параметри різних типівзйомок.
Таблиця 1.1
Технічні характеристики деяких приймачівGPS, що використовуються в Росії.
| Технічні характеристики | Назва приладів, фірма, країна виробник |
|||||
| (Франція) | (Німеччина) | geodetic Surveyor | (Швейцарія) |
|||
| 1. Точність вимірів у статичному режимі |
||||||
| СКО визначення збільшення координат (мм) | ||||||
| визначення відстаней (мм) | ||||||
| СКО визначення перевищень (мм) | ||||||
| 2. Приймач |
||||||
| Фаза L1, код С/А/Р Фаза L2 Кількість паралельних каналів Програмне забезпечення Габарити (ДхШхВ), (мм) Маса, кг) Вологість (%) Тип порту зв'язку Харчування (В) споживана потужність | ||||||
| 3. Антена |
||||||
| Вбудована антена Виносна антена | - | - | - | - | + | |
| Маса, кг) | ||||||
| 4. Спеціалізований комп'ютер (контролер) |
||||||
| Наявність контролера Необхідна напруга (В) Габарити (ДхШхВ) Температурний режим роботи (С°) | ||||||
| 5. Орієнтовна вартість робочого комплекту із 2-х приймачів USD |
||||||
Після виконання польової частини робіт потрібно «скопіювати» інформацію з приймача в комп'ютер для обчислення виміряних базових ліній, а також для вирішення цілого ряду завдань, таких як трансформація координат або побудова математичної моделімісцевості. Операція навантаження інформації здійснюється за допомогою спеціальної програми, що входить до стандартного пакета програмного забезпечення. Для цього можна використовувати навіть найпростіший персональний комп'ютер(до РС з процесором 086). Програмне забезпечення має «дружній» інтерфейс, тому робота оператора зводиться лише до послідовного виконання дій, що підказуються комп'ютером. Постобработка файлів даних (автоматична і ручна) передбачає послідовне виконання процесором низки складних математичних алгоритмів, що з рішенням системи нелінійних рівнянь. Складність реалізації таких алгоритмів пов'язана з вирішенням неоднозначності вимірюваної фази несучих частот, а також необхідністю побудови моделей іоносферної та тропосферної затримки супутникових сигналів. Результатом роботи цих алгоритмів є визначення складових вектора базової лінії (прирощень координат між точками) у геоцентричній загальноземній системі координат WGS-84 з супутніми статичними та точнісними характеристиками як власне вимірювань, так і подальшої обробки, які є необхідними для процесу зрівнювання. Таким чином, методика виконання зйомки з геодезичними GPS-приймачами проста та ефективна. Використовуючи GPS-обладнання, один геодезист може самостійно за короткий час виконати весь обсяг геодезичних робіт, починаючи від складання проекту до отримання зрівняного каталогу координат або топоплана місцевості. Однак усі ці переваги виглядають не такими явними на тлі високої вартості повного комплекту апаратури та програмного забезпечення. Для реальної оцінки ефективності приладів необхідно порівняти їх використання на деякому єдиному полігоні при вирішенні однотипних завдань. 1.3 Прилади, що використовуються Вибір методики визначень та апаратури обумовлені головним чином характером рельєфу; термінами, встановленими замовником та фінансовими можливостями. Для реалізації встановленої схеми створення геодезичного обґрунтування з інвентаризації земель на об'єкті та виконанні у подальшому будівельних робіт було використано супутникову навігаційну апаратуру фірми Тrimble 4600LS Surveyor. Нижче наведено її основні характеристики. 4600LS Surveyor Економічний, повністю інтегрований прилад для GPS-зйомок. Простий у користуванні, високопродуктивний прилад для створення опорних мереж, проведення топографічних зйомок та збору даних для ГІС. Має можливість роботи у режимі реального часу. 4600LS Surveyor™ є недорогим високопродуктивним геодезичним GPS – інструментом для створення опорних мереж та проведення топографічних зйомок – навіть у реальному масштабі часу. Прилад не вимагає прямої видимості між пунктами і здатний працювати вдень і вночі за будь-якої погоди. Приймач 4600LS може ефективно використовуватися для проведення статичних, швидкостатичних (L1 FasStatic) GPS – зйомок на коротких та середніх базових лініях. 4600LS Surveyor має невеликі розміри та простий у користуванні. GPS-приймач, антена та батареї об'єднані в єдиний блок вагою всього 1.7 кг. Для роботи 4600LS не потрібні зовнішні джерела живлення та додаткові кабелі. Наявність лише однієї клавіші керування та трьох світлодіодних індикаторів дозволяє легко контролювати процес виконання зйомки. 4600LS – працює від батарейок типу С (343-елементи). Під час зйомок з постобробкою комплекту батарейок вистачає на 4 дні роботи. При створенні опорних мереж приймач 4600LS встановлюється на штативі та вмикається одним натисканням кнопки. Для ефективного проведення топографічних зйомок 4600LS кріпиться на вішці і управляється за допомогою портативного контролера ТSCI, що додатково поставляється. Зібрані в полі дані вивантажуються через послідовний порт, який також служить для підключення контролера. Контролер використовується для налаштування параметрів роботи приймача та введення інформації про пункти. Приймач 4600LS створений для використання у екстремальних польових умовах. Він працює в діапазоні температур від -40 до +65°С, повністю герметичний і не тоне у воді. Результати зйомки можуть зберігатися у внутрішній пам'яті приймача або контролера. Для забезпечення високої точності та продуктивності 4600LS здійснює високоякісні вимірювання по фазі несучої та С/А коду на частоті LI при виконанні статичних, одночастотних швидкостатичних (LI Fast Static) зйомок, а також при зйомках у реальному масштабі часу. 4600LS Surveyor може зберігати дані більше 64 годин вимірювання в режимі швидкостатичної зйомки. Формат даних сумісний з форматами інших GPS-приймачів фірми Trimble. При використанні в комплекті з високоефективним програмним забезпеченням для обробки GPSurvey ТМ фірми Trimble створення опорних геодезичних мереж може бути виконано з субсантиметровою точністю при коротких сеансах спостережень. При роботі в реальному масштабі часу (DGPS) через другий послідовний порт приймач 4600LS приймає диференціальні поправки у форматі RТСМ, що дає змогу отримувати координати в реальному часі з помилкою менше 1 метра. Можлива модернізація 4600LS для зйомок в реальному часі (RТК), при якій забезпечується сантиметрова точність координат безпосередньо в момент спостережень на пункті. Для забезпечення субметрової точності у знімальних додатках 4600LS поєднується з програмою Asset Surveyor™ та продуктами серії Pathfinder фірми Trimble. У цьому випадку він може використовуватися для створення високоточних мереж. Приймач 4600LS Surveyor фірми Тrimble - найбільшого у світі виробника GPS - продукції - є першим комбінованим геодезичним GPS - приймачем, що дозволяє об'єднати якість і зручність використання з високою продуктивністю при цілком доступною ціною.
Технічні характеристики:
Розміри: 22.1 см (діаметр) х 11.8 см (висота) Вага: 1.4 кг без батарей; 1.7 кг з батареями класу С Вбудована пам'ять: 1 Мб Електричні: Електроживлення: споживана потужність менше 1 Ватта 5В пост. струму від 4 батарей класу С (343 елементи); 9-20В пост. струму від зовнішніх джерел живлення. Батареї: більше 32 годин роботи від 4 лужних батарей класу С (при номінальній температурі). Індикатори стану: Три світлодіодні індикатори: живлення, збирання даних та відстеження супутників. Увімк./Вимк.: одна кнопка живлення/запуску зйомки. Антена: мікросмужкова, об'єднана із приймачем. Інтерфейс: два RS232 порти для підключення контролера/накопичувача даних або радіомодему (швидкість передачі даних до 38400 бод).
Умови експлуатації:
Температура: робоча: від -40 до +65 °С зберігання: від -55 до +75 °С Вологість: 100%, повна герметизація, не тоне у воді. Витримує падіння з 2-метрової висоти. Виконання статичної зйомки: Режими: Статика зі швидким стартом (Quick-Start Static) Швидка одночастотна статика (LI FastStatic) Точність: У плані: 5 мм + 1 мм/км (при довжині лінії<10 км) 5 мм + 2 мм/км (при длине линии >10 км) За висотою: 10 мм + 2 мм/км за азимутом: 1” + 5”/км Мається на увазі, що на всіх пунктах безперервно відстежується як мінімум 5 ШСЗ відповідно до рекомендованої методики проведення одночастотних статичних зйомок. Точність зйомки в режимі LIFastStatic є функцією тривалості сеансу вимірювання та умов спостережень на пунктах. 1.4 Програмне забезпечення рівняння геодезичних мереж ТRМNЕТ Plus™ В даний час з'явилася можливість об'єднати процедури вирівнювання, використовуючи як ОР8 вимірювання, так і традиційні (оптичні) вимірювання, а також ортометричні висоти. Все це дозволяє робити розширена версія універсального програмного забезпечення вирівнювання мережі, яка була розроблена фірмою Trimble. Маючи програмне забезпечення ТRIМNЕТ Рlus, можна зробити спільну обробку GPS вимірювань, традиційних вимірювань, включаючи спостереження кутових величин, різниці висот з метою здійснення остаточного вирівнювання мережі або роздільного вирівнювання, використовуючи окремо кожен з видів наведених вимірів. В результаті ви отримаєте виконані окремо або спільно процедури зрівнювання мережі по ортометричній висоті та висоті над еліпсоїдом. Крім того, використання програмного забезпечення TRIMNET Plus дозволяє проводити одночасне налаштування кількох мереж. Аналіз як GPS, так і традиційних оптичних вимірювань, а також автоматичного обчислення координат стає швидше і простіше за рахунок використання програмного забезпечення TRIMNET Plus. При розрахунку мереж можна використовувати різні комбінації систем координат (ЕСЕF Декартових, еліпсоїдальних та планових картографічних проекцій). Крім того, користувач може встановити власну систему відліку. При комбінуванні GPS вимірювань, моделі геоїду та даних традиційної зйомки, програмне забезпечення TRIMNET Plus здійснює зрівняння ортометричних висот з точністю заявлених помилок. Це дає користувачеві найточніший метод визначення значень висот за допомогою GPS. Якщо ви вирішили не використовувати модель геоїду, то в результаті комбінування традиційних та GPS вимірювань ви отримаєте оцінки відмінності геоїду від вибраної моделі. За допомогою програмного забезпечення TRIMNET Plus можна виконати зрівняння традиційних вимірювань на станції, забезпечуючи введення необроблених даних з клавіатури або з файлів, записаних у накопичувачі даних. Таким чином, після вирішення низки завдань (від початкового планування робіт до організації бази даних) за допомогою універсального програмного пакету TRIMVEC Plus, ви можете виконати побудову та остаточне зрівняння вашої мережі, використовуючи TRIMNET Plus і комбінуючи результати GPS та традиційних вимірювань, а також модель геоїду . Характеристики. Програмне забезпечення TRIMNET Plus являє собою: Ефективний та простий у використанні засіб, що має всі можливості, необхідні для повного завершення процедури зрівнювання геодезичної мережі; Кероване за допомогою системи меню, ПЗ має на виході інформацію, подану в графічній формі; Здійснює автоматичне та безпосереднє зчитування вихідних файлів, оброблених за допомогою ТRIMVEC Plus; Забезпечує три режими вирівнювання мережі - для даних, отриманих за допомогою GPS вимірювань, традиційних вимірювань та комбінованих вимірювань; Забезпечує механізм зчитування файлів, завантажених у накопичувач даних у процесі проведення традиційних зйомок та представлених у DCO форматі; Зчитує і використовує файли Geoid 90 Geoid 91 для виконання найбільш точних процедур зрівнювання; Надає користувачеві можливість вводити в процесі зрівнювання геодезичні, державні плоскі та місцеві координати, задані користувачем, а також визначати найбільш зручну вихідну систему координат; Одиниці лінійних вимірювань, що задаються користувачем, включаючи метр, US Геодезичний фут, міжнародний фут та інші одиниці вимірювання, що задовольняють вимогам замовника; Вихідні дані надходять безпосередньо на графобудівник, забезпечуючи формування зображення мережі з накладеними на нього еліпсами помилок по кожній станції; Подання вихідної інформації у системі плоских координат: дистанція на площині, дирекційний кут, масштабний коефіцієнт та інших. ; Подання вихідної інформації в системі геодезичних координат: геодезична дальність, геодезичний азимут, різниця між еліпсоїдальною та ортометричною висотами; Налаштування великих геодезичних мереж, що складаються з більш ніж 32 000 точок; Можливість перетворення дозволяють визначити зсув місцевої системи відліку під час переходу від проекту до проекту чи визначити місцеву систему відліку, зрівняння у якій вже було зроблено. GPSurvey ™ 2.0 У деяких випадках, коли територія зйомки є значною, використовують і інший варіант програмного забезпечення. Програмне забезпечення для GPS зйомки, що працює в середовищі Windows . GPSurvey є найпопулярнішим у світі програмним забезпеченням для постобробки даних та управління проектом зйомки. GPSurvey 2.0 дозволяє здійснити цілий комплекс завдань: - спланувати GPS зйомку; вивантажити дані з геодезичних приймачів фірми Trimble, геодезичних контролерів ТDC1 та інших накопичувачів даних; обробити одночастотні або двочастотні GPS дані, отримані внаслідок виконання статичних, швидких статичних зйомок; переглянути та проаналізувати результати; виконати ретельне вирівнювання мережі; експортувати вирівняні координати; Скласти загальноприйняті звіти про проект. Модуль вирівнювання мережі TRIMNET Plus забезпечує спільне вирівнювання результатів традиційних геодезичних вимірювань і GPS даних, включаючи дані, отримані з постобробки або в реальному масштабі часу. [5] У самому серці GPSurvey знаходиться WAVE – процесор обробки базисних ліній. Він відкриває користувачам можливість значного підвищення продуктивності польових робіт. По - перше, процесор WAVE здатний отримувати надійні результати для довгих ліній і для різних умов на пунктах. По-друге, геодезисти у полі мають повну свободу дій, оскільки WAVE обробляє разом і автоматично всі типи GPS даних – результати статичних, швидкостатичних зйомок. Спроектований геодезистами та розроблений професійними програмістами, GPSurvey простий у використанні. Він має графічний Microsoft Windows інтерфейс користувача, інтуїтивне керування, а також ретельно розроблений набір параметрів за замовчуванням. Наявність єдиної бази даних та повністю інтегрованих модулів полегшує перемикання між різними завданнями. Для досвідченого користувача GPSurvey надає широкий вибір параметрів керування. До складу GPSurvey 2.0 стандартно входить модуль для імпорту та експорту даних у RINЕХ форматі. Складання звітів за проектом можливе у попередньо заданих форматах ASC11, в форматах ASC11, заданих користувачем, а також у форматі DXF. Додаткова утиліта перетворення координат дає можливість виконувати трансформацію незалежно від рівняння мережі. GPSurvey може поставлятися у різних конфігураціях. Програмні пакети для обробки одночастотних або двочастотних даних постачаються з однією або двома ліцензіями. Варіант GPSurvey, призначений для підтримки роботи в реальному масштабі часу, забезпечує завантаження, перегляд та зрівняння даних, отриманих під час зйомок у реальному часі. Крім того, компоненти GPSurvey можуть поставлятися окремо. Модуль GPSurvey Manager дозволяє здійснювати планування, завантаження даних, перегляд мережі та перетворення координат. Опції обробки базисних ліній виконують обробку результатів одночастотної (L1) статичної зйомки, двочастотної (L1/L2) швидкої статичної зйомки, а також кінематичної зйомки з ОТР ініціалізацією. Модуль TRIMNET Plus, що постачається як програма вирівнювання мережі, може також поставлятися окремо на додаток до GPSurvey Manager. Програмне забезпечення GPSurvey розроблено фірмою Trimble, найбільшим світовим виробником геодезичної GPS апаратури, а також лідером в галузі застосування GPS для геодезичних робіт. загальні характеристики. Програмне забезпечення для постобробки GPS даних та управління проектом зйомки складається з модулів, що працюють на IBM сумісних персональних комп'ютерах в операційному середовищі Windows, і дозволяють здійснювати: Планування робіт; Вивантаження та передачу даних; обробку результатів спостережень; Зрівняння мережі; Графічний аналіз даних та результатів обробки; Складання звітів щодо проекту; Перетворення координат та експорт даних. Вимоги до комп'ютера: IBM – сумісний ПК із процесором intel Pentium (рекомендується процесор intel Pentium II і вище), математичним співпроцесором, 128Мб ОЗП (мінімум), 20Мб вільного місця на диску для інсталяції OP8.EXE, сумісний з Windows маніпулятор "миша", Windows версії 98 або вище, DOS версії 6.22 або вище. Інтерфейс користувача: Графічні значки; Управління за допомогою маніпулятора "миша"; Система падіння меню; Загальна база даних проекту, доступна будь-якого модуля; Всеосяжна система оперативної довідки; Інтегрована система довідкової інформації; Параметри обробки, що задаються користувачем, включаючи вибір використовуваних супутників, маски піднесення, час початку і закінчення спостережень, меж для відбраковування.
2. ПІДВИЩЕННЯ ТОЧНОСТІ ПРИВ'ЯЗКИ ОПІЗНАКІВ
Для прив'язки опознаків в даний час в геодезії та аерофотозйомці використовують комбіновані методи. За наявності супутникової апаратури, коли кількість опознаків буде 50 і більше вигідніше як з економічної точки зору, так і по точності виконувати їх прив'язку за допомогою супутникової апаратури, причому її можна здійснювати навіть з одночастотними приймачами. Ознаки готують для наступної аерозйомки, як правило, аерозйомку виконують на великій території 50 і більше гектарів. Вартість закладки розпізнавань та виконання геодезичної прив'язки буде дешевшою та економічно вигіднішою, коли їх буде більше. Якщо умова місцевості, які можуть знімати з літака не дозволяють ефективно використовувати супутникову апаратуру, то в цих випадках доцільно використовувати класичний метод прив'язки опознаків, хоча точність при цьому в залежності від відстані може бути меншою. Точність прив'язки опознаків має бути більше 5-10см. Теодолітні або полігонометричні ходи з відстанню по 5-7км. протяжністю можуть забезпечувати зазначену точність, але їх необхідно виконувати у прямому та зворотному напрямку і після польових робіт необхідно зрівняти отримати каталог координат, який необхідний, буде при обробці аероз'ємних матеріалів у певному масштабі. В даний час класичний метод можна дуже ефективно прив'язувати за допомогою електронних тахеометрів, які значно підвищують точність та продуктивність праці при виконанні польових робіт у закритій, лісовій місцевості. Саме за допомогою електронного тахеометра або класичних методів можна прив'язати опознаки з більш високою точністю для більш точного забезпечення координат тієї місцевості, яка підлягає аерозйомці. Для підвищення точності опознаків слід керуватися і доцільно використовувати як супутникове обладнання, так і звичайне геодезичне, але з використанням електронних тахеометрів, які за точністю визначення будуть рівноточними визначенню координат супутниковими технологіями. Так як при прив'язці розпізнавальних значень може використовуватися одночастотна апаратура, то вартість робіт буде на 20-30% дешевше, а по точності вона відповідатиме нормативним вимогам. Слід зазначити, що опознаки, які будуть прив'язані супутниковим або класичним методом на місцевості, повинні бути позначені так, щоб на знімку добре дешифрувалися. Для цього необхідно при рекогносцируванні та закладці, опознаки треба вибирати таким чином, щоб усі природні контурні точки (кути парканів, канав, іригаційних споруд тощо). програмного забезпечення MAPINFO можна підвищити їхню точність. 2.1 Визначення координат розпізнавань Для визначення геодезичних координат опознаків застосовують аналітичні геодезичні методи. Планові координати точок визначають GPS або аналітично методами тріангуляції, полігонометрії, трилатерації, різними засічками (кутовими, лінійними та азимутальними), комбінованим способом з вимірюванням відстаней далекоміром та визначенням астрономічних (гіроскопічних) азимутів. Їх можна визначати зворотним азимутальною засічкою за двома, трьома вихідними пунктами. СКО астрономічного азимуту не більше 15". Їх визначають також комбінованим способом з вимірюванням відстаней далекоміром і визначенням астрономічних азимутів, наприклад, будують лінійно-азимутальні ланки або визначають зворотною лінійною засічкою по одному вихідному пункту з вимірюванням азимуту на їх визначенню. Залежно від способу фотограмметричного згущення і масштабу карти, які застосовуються, вони повинні бути розраховані при складанні проекту польової підготовки знімків за формулами, що характеризують накопичення помилок у фотограмметричних мережах. ) на знімках Крім того, для кожного розпізнавання складається абрис, що показує його положення щодо найближчих контурів. тограмметричних визначень, а саме зі СКО hсіч 10 = 0.25 м. Тоді її помилки не вплинуть на точність проведення горизонталей. Планова польова підготовка знімків повинна виконуватися точніше за фотограмметричні визначення, а саме зі СКОd геодез. = СКОd фотгр. = 0.1 мм у масштабі складання. Тоді помилки геодезичних термінів не вплинуть на точність фотограмметричного згущення. Опознак – це контурна точка, яка добре впізнається на аерофотознімку та на місцевості, координати якої визначаються геодезичними методами. Загальні вимоги до розташування пунктів знімального обгрунтування, і навіть схеми розташування були представлені раніше. У ролі розпізнавальних виступали характерні точки місцевості, чіткі контури, в нерухомості і довговічності яких можна бути впевненим (кут паркану, стовпи ЛЕП, залізобетонні плити і т.д.). За відсутністю чітких контурів опознаками були: дерева, що окремо стоять, кущі. По можливості впізнання вибиралися з найменшою висотою над рівнем землі (через помилку проекції фазового центру антени), на відкритому місці та ближче до доріг. Вибране розташування розпізнавання наносять на аерофотознімки збільшеного друку масштабу 1:2000 шляхом наколу (точність накалювання 0,1мм). Кожному розпізнаванню присвоювався порядковий номер з таким розрахунком, щоби на об'єкті не було знаків з однаковими номерами. Центрування антен приймачів здійснювалося за допомогою оптичного центриру, вмонтованого в трегер (використовувалися трегери фірми Trimble США) з точністю близько 1 мм. Вимірювання висоти антени над центром пункту виконувалося складним жезлом з точністю 1 мм двічі - перед початком та після закінчення сеансу спостережень. Орієнтування антени північ було необов'язково завдяки її конструктивним особливостям. Кожен оператор при кожному включенні приймача на кожній точці обов'язково заповнював свій польовий журнал, кожна сторінка якого була бланк певної форми. У цьому бланку вказується: - назва робочого проекту; -Район робіт; -Дата спостережень, -Тип спостережень; -початок і кінець спостережень; -Назва пункту; -висота фазового центру антени перед початком та після закінчення сеансу спостережень; -Номер приладу. Бланк закінчувався підписом спостерігача та підписом того, хто перевірив записи. Кожен приймач був укомплектований польовими контролерами, завдяки яким оператор міг безпосередньо спостерігати процес вимірів і зарядкою акумуляторів. Подвійний вимір висоти виконувався переважно контролю, проте іноді це дозволяло виявити зміна висоти антени під час проведення вимірювань на заболочених територіях. При відстанях між пунктами, що становлять десятки кілометрів, час спостереження, що забезпечує сантиметрову точність визначення взаємного становища, з досвідчених даних, становить 4-6 годин. Однак внаслідок того, що час підходу та під'їзду до пунктів від місця базування польової партії, і, відповідно, час початку спостережень суттєво відрізнялися, а також через наявність обмеженої кількості одиниць автотранспорту, організувати одночасне включення та вимкнення приймачів на всіх пунктах, що спостерігаються при збереженні достатньої тривалості сеансу було неможливо. Тому доводилося чинити так: попередньо орієнтовно оцінювався час прибуття на кожен пункт та найбільш раціональний порядок під'їзду до пунктів з урахуванням кількості задіяних людей, автомобілів та розташування пунктів щодо дорожньої мережі; на час включення останнього приймача додавалася, як правило, 6 годин, як термін, що забезпечує достатню точність на відстані кілька десятків кілометрів, плюс деякий запас на непередбачені затримки (30 хв). В першу чергу оператори з приймачами доставлялися автотранспортом до найвіддаленіших і важкопрохідних пунктів, а потім - до найдоступніших. Усі приймачі включалися у свій час у міру прибуття на пункт, а вимикалися одночасно в розрахунковий момент вимкнення приймача, включеного останнім. Таким чином, між усіма вісьмома приймачами існували тимчасові перекриття не менше 6 годин, при цьому тривалість спостережень і відповідно перекриттів між деякими приймачами становила 8 годин і більше. При спостереженнях на пунктах мереж згущення установка приймачів здійснювалася за такою методикою: центрування, вимір висоти, фіксація моментів початку та кінця спостережень, заповнення польового журналу. Тривалість сеансів спостережень також становила близько шести годин. При визначенні пунктів знімального обґрунтування намагалися використовувати щонайменше одного пункту ГГС і щонайменше двох пунктів мереж згущення, це забезпечувало контроль під час обробки вимірювань. Час спостережень на пунктах залежало від багатьох причин, це: - кількість супутників, що спостерігалися; - Геометрія просторової засічки PDOP; - Відстань від пункту до базисної станції; - Якість прийому сигналу. Приблизний час, що витрачався на вимірювання, становив 40-60 хвилин, проте на декількох пунктах доводилося проводити GPS-зйомки і по 2-2,5 години. Під час роботи з приймачем всі сеанси спостережень виконувались як статики з такими параметрами: - кутова маска (кут відсічки) - 15°; - дискретність запису фазових вимірів – 15 сек.; - Обмеження PDOP - 8,0. Під час проведення вимірювань оформлюють аерофотознімки масштабу 1:2000 на лицьовій частині обводять місце розпізнавання двома колами різного радіусу, підписують номер розпізнавання. На звороті знімка аналогічно обводять місце наколу колами, підписують його номер, дають опис розпізнавання, висоту над рівнем землі, малюють абрис, ставлять число і підпис оператора. Правильність розжарювання та оформлення перевіряється "у другу руку", після перевірки ставиться дата та підпис перевіряючого. 2.2 Аналіз комп'ютерної обробки супутникових термінівВ результаті комп'ютерної обробки супутникових визначень координат опознаків у дипломній роботі було отримано 20 опознаків. Отримані дані після комп'ютерної обробки знаходяться в межах кількох сантиметрів, що підтверджує високу точність координат опознаків навіть в умовах несприятливих геодезичних робіт, при яких досить складно виконувати прив'язку опознаків. Програмне забезпечення MAPINFO дозволяє автоматизувати процес фотограмметричних даних дає можливість підвищити точність координат знімків за рахунок високої точності (опорних координат або розпізнавальних знаків), що стосується висотної частини, то супутникова апаратурадозволяє одночасно видавати інформацію, як у плані, і по висоті. Слід зазначити, що висотна складова при визначенні розпізнавальних значень може бути прив'язана в єдиній системі координат з точністю не грубіше кількох сантиметрів, що дуже важливо при створенні висотної складової знімка.
3. ТЕХНІКО-ЕКОНОМІЧНИЙ РОЗДІЛ ДИПЛОМНОЇ РОБОТИ
3.1 Розрахунок собівартості робіт для традиційного та GPS методу
Для оцінки економічної ефективності GPS методу, порівняно з традиційним, приймемо, що для ведення цих робіт потрібні фахівці одного рівня кваліфікації (з економічної точки зору, які отримують однакову заробітну плату). Далі, враховуючи вартість використовуваного обладнання та тимчасові витрати на проведення робіт, можна визначити економічну ефективність та економію коштів при використанні GPS обладнання шляхом нескладного (оцінного) розрахунку виконання повного обсягу робіт для кожного методу. Згідно з типовою методикою показником порівняльної економічної ефективності капітальних вкладень є мінімум наведених витрат 3:
3 = C + EнK = min, (3.1)
Де К - капітальні вкладення за кожним варіантом; C - собівартість за тим самим варіантом; Ен - нормативний коефіцієнт порівняльної ефективності (для топографо-геодезичних робіт = 0,15). Різниця витрат за традиційним методом Зтрад та GPS методом Зgps висловить розмір економічного ефекту Е:
Е = Витрат – Зgps, (3.2)
А з урахуванням формули (3.1):
Е = (Страд + ЕнКтрад) - (Сgps + ЕнКgps), (3.3)
Егод = ((Страд + ЕнКтр уд) - (Сgps + ЕнКgps уд))Агод gps
С – собівартість одиниці робіт
Собівартість (С) на виконання робіт можна розділити на основні витрати (ОР), накладні витрати (НР) та організаційно-ліквідаційні витрати (ОЛР).
С = ВР + НР + ОЛР (3.4)
Основні витрати складаються, головним чином, із загальних витрат на заробітну плату (ГРЗП) виконавців, амортизації: обладнання (АТ) та оплати транспорту (ТР).
ОР = ОРЗП + АР + ТР (3.5)
Для розрахунку загальних витрат на заробітну плату (ГРЗП) виконавців необхідно величину середньої денної заробітної плати (СДЗП) виконавця помножити на загальну кількість робочих людино-днів (ОКЧД), витрачену на виконання робіт:
ОРЗП = СДЗП х ОКЧД (3.6)
При оцінці середньої денної заробітної плати (СДЗП) обліковувалися місячна заробітна плата за ставками (ЗПС) на сумарний коефіцієнт надбавки, віднесений до кількості робочих днів на місяць:
СДЗП = 0,073 х ЗПС (3.7)
Не зважаючи на тимчасові витрати на закладку пунктів, зробимо розрахунок використаних робочих людино-днів на виробництво всього спектра робіт як при традиційному, так і при GPS методі. Загальну кількість робочих людино-днів (ОКЧД) можна розділити дні витрачені, на польові роботи (ЧДПР) і обробку спостережень (ЧДОН).
ОКЧД = ЧДПР + ЧДОН (3.8)
Згідно з розрахунками, проведеними для аналогічних робіт традиційним методом відповідно до єдиних норм часу, час, витрачений на польові роботи, склав 2 дні на рекогносцировку (чисельність виконавців 2 особи) та 14 днів на проведення вимірювань (чисельність виконавців 4 особи), звідси, людина -Днів, витрачені на польові роботи, можна розрахувати за такою формулою:
ЧДПРтрад = 2 дні * 2 виконавця (рекогносцировка) + 14 днів * 4 виконавця (вимірювання) = 4 ч/д + 56 ч/д = 60 ч/д
Аналогічно розрахуємо людино-дні, витрачені на польові роботи GPS методом, за формулою:
ЧДПР GPS = 1 день * 2 виконавці (рекогносцировка) + 3 дні * 2 виконавці (спостереження) = 2 ч/д + 6 ч/д = 8 ч/д
Таким чином, на виконання польових GPS робіт було витрачено у сім з половиною разів менше за людино-днів. Обробка спостережень:
ЧДОНтрад = 2 дні * 2 виконавці (планування) + 2 дні * 2 виконавці (організація) + 10 днів * 2 виконавці (обробка спостережень) + 4 дні * 1 виконавець (рівняння) = 4 год/д + 4 год/д + 20 ч/д + 4 ч/д = 36 ч/д
ЧДОН GPS = 1 день * 1 виконавець (планування) + 1 день * 1 виконавець (обробка спостережень) + 1день * 1 виконавець (рівняння) = 1 год / д +1 год / д +3 год / д + 1 год / д = 6 год/д
Таким чином, на організаційні та камеральні GPS роботибуло витрачено у 7,3 рази менше людино-днів. Відповідно до формули (3.8):
ОКЧДтрад = 60 год/д + 36 год/д = 96 год/д
ОКЧД GPS = 8ч/д + 6 ч/д - 14 ч/д
Отже, розраховуючи загальні витрати на заробітну плату за формулою (3.6), отримаємо:
ОРЗПтрад = 0,073 * ЗПС * 96 год / д = 7,008 * ЗПС
ОРЗП GPS = 0.073 * ЗПС * 14 год / д = 1,02 * ЗПС
Якщо прийняти середню ставку інженера-геодезиста у розмірі 3000 руб., То загальні витрати на заробітну плату становитимуть:
ОРЗПтрад = 21024 руб.
ОРЗП GPS = 3060 руб.
Для розрахунку амортизаційних витрат на обладнання, що використовується, припустимо, що все обладнання нове і період його окупності становить 36 місяців (864 робочих дні). Тоді денною нормою амортизаційних витрат (ДНАР) є відношення вартості обладнання (СО) до періоду його окупності.
ДНАР = СО/864 (3.9)
Так як прилади та засоби обробки використовувалися в різні інтервали часу, будемо враховувати їх окремо, тоді величина повних амортизаційних витрат на період використання (ПІ) обладнання.
АР = ДНАР * ПІ (3.10)
Таким чином, вихідними даними для розрахунку витрат на амортизацію є загальна вартість обладнання та період його використання. Вартість обладнання 1 Таблиця 3.1
| Традиційний метод: |
||
| Для спостережень: | світлодомір 2СТ-10 | |
| Теодоліт 2Т2 | ||
| ВСЬОГО | 65100 руб. | |
| ДНАР наб. | 75 руб. | |
| Для обробки: | програмний пакет | 8500 руб. |
| персональний комп'ютер | 15000 руб. | |
| ВСЬОГО | 23500 руб. | |
| ДНАР зр. | 27 руб. | |
| Для спостережень: | комплект приймачів4600LS Surveryor | |
| ВСЬОГО 365000 руб. | ||
| ДНАР наб. 422 руб. | ||
| Для обробки: | програмне забезпечення персональний комп'ютер | 35000 руб. 15000 руб. |
| ВСЬОГО 50000 руб. |
||
| ДНАР зр. 57 руб. | ||
Артрад = 75 руб. * 14 днів + 27 руб. * 4 дні = 1158 руб.
АРGPS = 422 руб. * 3 дні + 57 руб. * 1 день = 1323 руб.
Витрати на транспортні засоби складаються із витрат на заробітну плату водіїв та тарифів за використання автомобілів (за одну годину експлуатації та один кілометр пробігу). У день такі витрати становили в середньому 500 руб., Таким чином помноживши цю суму на період використання автомобілів можна отримати транспортні витрати, що шукаються.
ТРтрад = 500 руб. * (2 дні (рек.) + 14 днів (ізм.)) = 8000 руб.
ТРGPS = 500 руб. * (1 день (рек.) + 3 дні (ізм.)) = 2000 руб.
ОРтрад = 21 024 руб. + 1158 руб. + 8000 руб. = 30 182 руб.
ВР GPS = 3060 руб. + 1323 руб. + 2000 руб. = 6383 руб.
Накладні витрати за нормативами становлять 56% від суми основних витрат, а організаційно-ліквідаційні витрати становлять 30% від суми основних та накладних витрат. Таким чином, згідно з формулою (3.4) собівартість дорівнює:
C = ((1 + 0.56) + 0.3 * (1 + 0.56)) * ОР = 2,028 * ОР (3.11)
Для кожного методу ця сума складає:
Cтрад = 61209 руб. (Сед.раб = 1667 руб.)
Сgps = 12945 руб. (Сед.раб = 2499 руб.)
Капіталовкладення (K) є витрати коштів на придбання приладів та обладнання. КапіталовкладенняТаблиця 3.3
| Традиційний метод: | ||
| Світлододальник 2СТ-10 Теодоліт 2Т2 програмний пакет «ULUS» Персональний комп'ютер | 56600 руб. 8500 руб. 8500 руб. 15000 руб. | |
| Ктрад | ||
| GPS метод: | ||
| Для спостережень: Для обробки: | комплект приймачів 4600 LS Surveyor програмне забезпечення персональний комп'ютер | 365 000 руб. |
Витрат = 61209 руб. + 0,15*88600 руб. = 74 499 руб.
Зgps = 12945 руб. + 0,15*415000 руб. = 75 195 руб.
За формулою (3.3) розрахуємо економічний ефект:
Е = 76 730 руб. - 88571 руб. = - 696 руб.
Егод = 253421 руб
На підставі цього результату можна резюмувати відсутність економічної вигоди під час роботи на невеликих об'єктах, що пояснюється великим капіталовкладенням при невеликому обсязі робіт. Отримане значення економічного ефекту дозволяє визнати, що використання устаткування обладнання має відчутну економічну вигоду на значних за розміром об'єктах. Слід зазначити, що ділянка, що розглядається, є лише складовою більш великих земельних пошуків, відповідно до плану районного земельного комітету, як у Красногірському районі, так і за його межами. У зв'язку з цим було проведено оціночні розрахунки, у разі збільшення обсягів робіт як за тимчасовими показниками, так і за кількістю пунктів геодезичного обґрунтування. Враховуючи розміри об'єкта, що досліджується, і перспективний план подальшого виконання робіт, було розраховано необхідну за щільністю кількість пунктів. Проведено відповідні розрахунки та оцінка економічної ефективності при використанні GPS методу для реалізації всього проекту загалом. За загальної кількості пунктів (близько 100) та часу реалізації (сорок днів) було отримано результат Еgps = 3,4 рази. Звідси випливає, що для отримання позитивного економічного ефекту необхідно якнайінтенсивніше використовувати GPS обладнання. У зв'язку з тим, що на сьогоднішній момент найбільші обсяги топографо-геодезичних робіт мають роботи, пов'язані з інвентаризацією земель, можна припустити, що використання сучасних супутникових комплексів при проведенні цих робіт буде економічно доцільним і ефективним. Крім того, при використанні GPS методики було відзначено суттєве зменшення часу та матеріальних витрат, пов'язаних як з виконанням вимірювань, так і з обробкою отриманої інформації порівняно з традиційними методами. Це дозволяє зробити висновок про доцільність активного застосування GPS приймачів не тільки для побудови висококласних опорних геодезичних мереж, але і при виробництві топогеодезичних робіт нижчого класу, де ефект від їх застосування може бути значно вищим. 3.3 Гігієнічні вимоги до організації робітЗагальні положення та сфера застосування Справжні державні санітарно-епідеміологічні правила та нормативи (далі-санітарні правила) розроблені відповідно до Федерального закону «Про санітарно-епідеміологічний благополуччя населення» від 30 березня 1999 р. № 52-ФЗ (Збори законодавства Російської Федерації, 1999 р, №14, ст.1650) та Положенням про державне санітарно-епідеміологічне нормування, затвердженим постановою Уряду Російської Федерації від 24 липня 2000 р. № 554 (Збори законодавства Російської Федерації, 2000, № 31, ст. 3295). Санітарні правила діють по всій території Російської Федерації та встановлюють санітарно-епідеміологічні вимоги до персональних електронно-обчислювальних машин (ПЕОМ) та умов праці. Вимога санітарних правил спрямовані на запобігання несприятливому впливу, на здоров'я людини шкідливих факторів виробничого середовища та трудового процесу під час роботи з ПЕОМ. Ці санітарні правила визначають санітарно-епідеміологічні вимоги: - до проектування, виготовлення та експлуатації вітчизняних ПЕОМ; - експлуатації імпортних ПЕОМ, що використовуються на виробництві, у навчанні, побуті та ігрових комплексів (автоматів) на базі ПЕОМ; до проектування, будівництва та реконструкції приміщень, призначених для експлуатації всіх типів ПЕОМ, виробничого обладнання та ігрових комплексів (автоматів) на базі ПЕОМ; - До організації робочих місць з ПЕОМ, виробничим обладнанням та ігровими комплексами (автоматами) на базі ПЕОМ. Вимоги санітарних правил поширюються: - на умови та організацію роботи з ПЕОМ; - на обчислювальні електронні цифрові машини персональні, портативні; периферійні пристрої обчислювальних комплексів (принтери, сканери, клавіатура, зовнішні модеми, електричні комп'ютерні мережеві пристрої, пристрої зберігання інформації, блоки безперебійного живленнята ін.), пристрої відображення інформації (відеодисплейні термінали (ВДТ) всіх типів) та ігрові комплекси на базі ПЕОМ. Вимоги санітарних правил не поширюються на проектування, виготовлення та експлуатацію: - побутових телевізорів та ігрових приставок; - засобів візуального відображення інформації мікроконтролерів, вбудованих у технологічне обладнання; - ПЕОМ транспортних засобів; - ПЕОМ, що переміщуються у процесі роботи. Відповідальність за виконання цих санітарних правил покладається на юридичних осіб та індивідуальних підприємців, які здійснюють: - розробку, виробництво та експлуатацію ПЕОМ, виробниче обладнання та ігрові комплекси на базі ПЕОМ; - проектування, будівництво та реконструкцію приміщень, призначених для експлуатації ПЕОМ у промислових, адміністративних громадських будинках, а також в освітніх та культурно-розважальних установах. Індивідуальними підприємцями та юридичними особами у процесі виробництва та експлуатації ПЕОМ має здійснюватися виробничий контроль за дотриманням цих санітарних правил. Робочі місця з використанням ПЕОМ мають відповідати вимогам цих санітарних правил. Вимога до ПЕОМ ПЕОМ має відповідати вимогам цих санітарних правил, і кожен їхній тип підлягає санітарно-епідеміологічній експертизі з оцінкою у випробувальних лабораторіях, акредитованих в установленому порядку. Перелік продукції та контрольованих гігієнічних параметрів шкідливих та небезпечних факторів представлені в додатку. 3 (табл. 1). Допустимі рівні звукового тиску та рівнів звуку, створюваних ПЕОМ , не повинні перевищувати значень, поданих у дод. 3 (табл. 2). Тимчасові допустимі рівні електромагнітних полів (ЕМП), створюваних ПЕОМ, нічого не винні перевищувати значень, які у додаток. 3 (табл. 3). Допустимі візуальні параметри пристроїв відображення інформації представлені в додатку. 3 (табл. 4). Концентрація шкідливих речовин, що виділяються ПЕОМ у повітря приміщень, не повинні перевищувати гранично допустимих концентрацій (ГДК), встановлених для атмосферного повітря. Потужність експозиційної дози м'якого рентгенівського випромінювання у будь-якій точці на відстані 0,05 м від екрану та корпусу ВДП (на електронно-променевій трубці) за будь-яких положень регулювальних пристроїв не повинні перевищувати 1 мкЗв/год (100 мкР/год). Конструкція ПЕОМ повинна забезпечувати можливість повороту корпусу у горизонтальній та вертикальній площині з фіксацією у заданому положенні для забезпечення фронтального спостереження екрану ВДП. Дизайн ПЕОМ повинен передбачати фарбування корпусу в спокійні м'які тони з дифузним розсіюванням світла. Корпус ПЕОМ, клавіатура та інші блоки та пристрої ПЕОМ повинні мати матову поверхню з коефіцієнтом відображення 0,4-0,6 і не мати блискучих деталей, здатних створювати відблиски. Конструкція ВДП має передбачати регулювання яскравості та контрастності. Документація на проектування, виготовлення та експлуатацію ПЕОМ не повинна суперечити вимогам цих санітарних правил. Вимоги до приміщень для роботи з ПЕОМ Приміщення для експлуатації ПЕОМ повинні мати природне та штучне освітлення. Експлуатація ПЕОМ у приміщеннях без природного освітлення допускається лише за відповідного обґрунтування та наявності позитивного санітарно-епідеміологічного висновку, виданого в установленому порядку. Природне та штучне висвітлення має відповідати вимогам чинної нормативної документації. Вікна у приміщеннях, де експлуатується обчислювальна техніка, переважно має бути орієнтована на північ та північний схід. Віконні отвори повинні бути обладнані регульованими пристроями типу: жалюзі, завіс, зовнішніх козирків та ін. Не допускається розміщення місць користувачів ПЕОМ у всіх освітніх та культурно-розважальних закладах для дітей та підлітків у цокольних та підвальних приміщеннях. Площа на одне робоче місце користувачів ПЕОМ з ВДТ на базі електронно-променевої трубки (ЕЛТ) має становити не менше 6 кв. , у приміщеннях культурно-розважальних закладах та з ВДТ на базі плоских дискретних екранів (рідкокристалічні, плазмові) – 4,5 кв.метр. При використанні ПЕОМ З ВДТ на базі ЕПТ (без допоміжних пристроїв – принтер, сканер та ін.), що відповідають вимогам міжнародних стандартів безпеки комп'ютерів, з тривалістю роботи менше 4 годин на день допускається мінімальна площа 4,5 кв. на одне робоче місце користувача (дорослого та учня вищого професійної освіти ). Для внутрішньої обробки інтер'єру приміщень, де розташовані ПЕОМ, повинні використовуватися матеріали, що дифузно відбивають, з коефіцієнтом відображення для стелі -0,7-0,8; для стінок -0,5-0,6; для підлоги –0,3-0,5. Полімерні матеріали використовуються для внутрішнього оздоблення інтер'єру приміщень з ПЕОМ за наявності санітарно-епідеміологічного висновку. Приміщення, де розміщуються робочі місця з ПЕОМ, повинні бути обладнані захисним заземленням (зануленням) відповідно до технічних вимог експлуатації. Не слід розміщувати робочі місця з ПЕОМ поблизу силових кабелів та вводів, високовольтних трансформаторів, технологічного обладнання, що створює перешкоди у роботі ПЕОМ. Вимоги до мікроклімату, вмісту аероіонів та шкідливих хімічних речовин у повітрі на робочих місцях, обладнаних ПЕОМ У виробничих приміщеннях, в яких робота з використанням ПЕОМ є допоміжною, температура, відносна вологість та швидкість руху повітря на робочих місцях повинні відповідати діючим санітарним нормам мікроклімат . У виробничих приміщеннях, у яких робота з використанням ПЕОМ є основною (диспетчерські, операторські, розрахункові, кабіни та пости управління, зали обчислювальної техніки та ін.) та пов'язана з нервово-емоційною напругою, повинні забезпечуватись оптимальні параметри мікроклімату для категорії робіт 1а та 1б відповідно до чинних санітарно-епідеміологічних нормативів мікроклімату виробничих приміщень. На інших робочих місцях слід підтримувати параметри мікроклімату на допустимому рівні, який відповідає вимогам зазначених вище нормативів. У приміщеннях всіх типів освітніх та культурно-розважальних закладів для дітей та підлітків, де розташовані ПЕОМ, повинні забезпечуватись оптимальні параметри мікроклімату: додаток. 3 (табл. 6) У приміщеннях, обладнаних ПЕОМ, проводиться щоденне вологе прибирання та систематичне провітрювання після кожної години роботи на ПЕОМ. Рівні позитивних та негативних аероіонів у повітрі приміщень, де розташовані ПЕОМ, повинні відповідати чинним санітарно-епідеміологічним нормативам. Зміст шкідливих хімічних речовин у повітрі виробничих приміщень, в яких робота з використанням ПЕОМ є допоміжною, не повинна перевищувати гранично допустимих концентрацій шкідливих речовин у повітрі робочої зони відповідно до чинних гігієнічних нормативів. Зміст шкідливих хімічних речовин у повітрі приміщень, призначених для використання ПЕОМ у всіх типах освітніх установ, не повинно перевищувати гранично допустимих середньодобових концентрацій для атмосферного повітря відповідно до чинних санітарно-епідеміологічних нормативів. Вимоги до рівня шуму та вібрації на робочих місцях, обладнаних ПЕОМ. У виробничих приміщеннях під час виконання основних або допоміжних робіт з використанням ПЕОМ рівні шуму на робочих місцях не повинні перевищувати гранично допустимих значень, встановлених для цих видів робіт відповідно до чинних санітарно-епідеміологічних нормативів. У приміщеннях всіх освітніх та культурно-розважальних закладах для дітей та підлітків, де розташовані ПЕОМ, рівні шуму не повинні перевищувати допустимих значень, встановлених для житлових та громадських будівель. Під час виконання робіт з використанням ПЕОМ у виробничих приміщеннях рівень вібрації не повинен перевищувати допустимих значень вібрації для робочих місць (категорія 3, тип «в») відповідно до чинних санітарно-епідеміологічних нормативів. У приміщеннях всіх типів освітніх та культурно-розважальних установ, в яких експлуатуються ПЕОМ, рівень вібрації не повинен перевищувати допустимих значень для житлових та громадських будівель відповідно до чинних санітарно-епідеміологічних нормативів. Шумне обладнання (друкарські пристрої, сервери тощо), рівні шуму, що перевищують нормативні, повинні розміщуватися поза приміщеннями з ПЕОМ. 3.4 Вплив забрудненості атмосфери на результати вимірівВплив забрудненості атмосфери на результати отриманих вимірів особливого впливу не надає. Забрудненість атмосфери на супутникові виміритакож не впливає. Виконані за останні роки численні експериментальні дослідження в галузі мінімізації помилок супутникових координатних визначень свідчить про те, що до теперішнього часу одним із домінуючих факторів, що обмежує точність кінцевих результатів, є недостатньо строго врахований вплив тропосферної рефракції, зумовлений труднощами обліку вмісту в приземних шарах. . Також на результати кінцеві результати впливають три фактори: температура, вологість та тиск. На основі досліджень встановлено, що через недостатньо строго врахування вологості повітря точність визначення вертикальної координатної компоненти обмежуються величиною, укладеною в діапазоні від 4 до 10 мм, а для горизонтальних компонент від 2 до 5 мм. З урахуванням цього використовують метод визначення інтегрального значення вологості вздовж траєкторії поширення радіосигналів від супутника до приймача за допомогою радіометрів водяної пари спрямованої дії. Вдасться підвищити точність визначення вертикальної координатної компоненти приблизно в 5 разів і вийти на один міліметровий рівень точності. Але використання радіометрів водяної пари пов'язане з великими додатковими витратами та надмірним ускладненням всього процесу супутникових спостережень на кожному з пунктів мережі.
ВИСНОВОК
В результаті виконаної роботи та аналізу результатів можна зробити такі основні висновки: 1. Вибір апаратури для реалізації проекту пояснюється особливостями рельєфу, структурою вихідної топогеодезичної інформації та відсутністю видимості між опорними пунктами, а метод позиціонування та тривалість обсервації залежить від вимог до точності відповідних нормативних документів. 2. Результати визначення координат опознаків та їх прив'язки вказують на повне відповідності запитам споживача. Крім того, при використанні GPS-методики було відзначено підвищення точності суттєве зменшення часу та матеріальних витрат, пов'язаних як з виконанням вимірювань, так і з обробкою отриманої інформації порівняно з традиційними методами. 3. Необхідно відзначити незаперечні переваги використання GPS-методу під час проведення знімальних робіт, порівняно з традиційним, який полягає в наступному: - відсутня необхідність прямої видимості між точками; - Досяжна більш висока точність визначення координат розпізнавальних значень, а значить і їх прив'язки; - Суттєво збільшується швидкість робіт; - Отримання результатів в єдиній загальноземній системі координат; - Комплексне отримання координат (тривимірне, планово-висотне); - високий рівень автоматизації як польових, і камеральних робіт; - Можливість виконання робіт одним виконавцем (оператором); - Підвищення безпеки виконання робіт; - Економічна доцільність при інтенсивному використанні. Таким чином, є реальна основа для широкого впровадження супутникових методів геодезичних визначень у разі підвищення точності прив'язки опознаків.
Додаток 1
Повідомлення програми обробки (фрагмент)
| **** SSF/SSK Solution Output Files For Selected Baselines **** | ||||||
| .ssf/.ssk Solution | From Station | To Station | Solution | Slope | Ratio | |
| Output File | Short Name | Short Name | Type | |||
| O0002432.ssf | Base1 | Base 2 | LI float | |||
| O0002364.ssf | Base1 | Base 2 | LI fixed | |||
| O0002360.ssf | Base1 | Base C | LI fixed | |||
| O0002340.ssf | Base1 | Base C | LI fixed | |||
| O0002436.ssf | Base1 | LI float | ||||
| 000023 88.ssf | Base 2 | LI fixed | ||||
| O0002428.ssf | Base 2 | LI fixed | ||||
| O0002468.ssf | Base 2 | LI fixed | ||||
| O0002440.ssf | Base 2 | Rp-03 | LI fixed | |||
| O0002444.ssf | Base 2 | Rp-03 | LI fixed | |||
| O0002448.ssf | Base 2 | Rp-03 | LI fixed | |||
| O0002452.ssf | Base 2 | Rp-03 | LI fixed | |||
| O0002456.ssf | Base 2 | Rp-03 | LI fixed | |||
| O0002392.ssf | Rp-02 | LI fixed | ||||
| O0002420.ssf | Rp-02 | LI fixed | ||||
| O0002404.ssf | Rp-01 | Base 2 | LI fixed | |||
| O0002408.ssf | Rp-01 | Base C | LI fixed | |||
| O0002396.ssf | Rp-02 | Base 2 | LI fixed | |||
| O0002424.ssf | Rp-02 | Base 2 | LI fixed | |||
| O0002344.ssf | Rp-02 | Rp-01 | LI fixed | |||
| O0002368.ssf | Rp-02 | Rp-01 | LI fixed | |||
| O0002472.ssf | Rp-02 | RP-04 | LI fixed | |||
| O0002460.ssf | Rp-03 | Base C | LI float | |||
| O0002464.ssf | Rp-03 | Base C | LI fixed | |||
| O0002480.ssf | Rp-03 | Rp-01 | LI fixed | |||
| O0002348.ssf | Rp-03 | RP-04 | LI fixed | |||
| O0002372.ssf | Rp-03 | RP-04 | LI fixed | |||
| O0002412.ssf | RP-04 | Base 2 | LI fixed | |||
| O0002384.ssf | RP-04 | Base C | LI fixed | |||
| 000024 16.ssf | RP-04 | Base C | LI fixed | |||
| O0002400.ssf | RP-04 | Rp-01 | LI fixed | |||
| O0002356.ssf | RP-07 | Rp-01 | LI fixed | |||
| 000023 SO.ssf | RP-07 | Rp-01 | LI fixed | |||
| 00002476. ssf | RP-07 | Rp-03 | LI fixed | |||
| O0002352.ssf | RP-07 | RP-04 | LI fixed | |||
| 000023 76. ssf | RP-07 | RP-04 | LI fixed | |||
Продовження додатку 1
Redund.txt Від Великобританії до Великобританії Дельта н Дельта е Дельта U ID SSF File BPC Comment Base C Base 2 -7562.0637 -258.4196 -35.1682 0.0000 0.0000 0.0000 2435 Solutions 45 Base C Base 2 -7562.0429 -258.6049 -35.2589 -0.0208 0.1853 0.0906 2367 Solutions Imported from SSF Files 28-10-05 3:31:45 Base C Base 1 -4397.0472 6777.7670 5.2641 0.0000 0.0000 0.0000 2439 Solutions Imported from SSF Files 28- 10-05 3:31:45 Base C Base 1 -4397.0625 6777.9494 5.3162 0.0154 0.1824 -0.0521 2363 Solutions Imported from SSF Files 28-10-05 3:31:45 Base C Base 1 -4397.0625 6777.9494 5.3162 0.0154 0.1824 -0.0521 2343 Solutions Imported from SSF Files 28-10-05 3:31:45 Base 2 Base 1 3164.7060 6519.4814 37.0802 0.0000 0.0000 0.0000 2431 Solutions Imported from SSF Files 28-10-05 3:31:45 Base 2 Base 1 3164.7181 6519.4874 37.0611 -0.0121 0.0059 0.0190 2391 Solutions Imported from SSF Files 28-10-05 03:31:45 Base 2 Base 1 3164.6928 6519.4871 37.0141 0.0132 0.005 7 0.0661 2471
Додаток 2
Координати точок виміряні з використаннямGPSприймача та точність їх визначення
| № Крапки | координати | помилки |
|
| 6155996.995 217842.670 | 0.00 3 0.00 3 0.00 6 |
||
| 6156759.621 218354.919 | 0.00 8 0.00 4 0.0 14 |
||
| 6156745.057 218311.510 | 0.00 1 0.00 1 0.0 04 |
||
| 6158660.593 218038.396 | 0.00 3 0.0 10 |
||
| 6158624.369 217979.607 | 0.0 13 |
||
| 6158621.175 217984.308 | 0.0 10 |
||
| 6158612.179 218058.471 | 0.0 04 0.00 6 0.0 12 |
||
| 6158613.355 218064.423 | |||
| 6158617.471 218067.430 | 0 .010 |
||
| 1 0 | 6158624.240 218075.890 | ||
| 6158627.523 218048.673 | |||
| 6158768.129 218247.920 | |||
| 6159090.223 217905.211 | |||
| 6159068.109 217962.410 | |||
| 6159053.257 217993.165 | |||
| 6156635.332 218201.444 | |||
| 6156168.439 219244.309 | |||
| 6156025.068 221289.235 | |||
| 6157553.007 220872.694 | |||
| 6157505.481 220804.210 | |||
Додаток 3
Таблиця 1
| Вид продукції | Контрольовані гігієнічні параметри |
||
| Машини обчислювальні електронні цифрові, машини обчислювальні електронні цифрові персональні (включаючи портативні ЕОМ) | Рівні електромагнітних полів (ЕМП), акустичного шуму, концентрація шкідливих речовин у повітрі, візуальні показники ВДТ, м'яке рентгенівське випромінювання |
||
| Пристрої периферійні: Принтери, сканери, модеми, мережеві пристрої, блоки безперебійного живлення та ін. | Рівні ЕМП, акустичного шуму, концентрація шкідливих речовин у повітрі |
||
| Пристрої відображення інформації (відеодисплейні термінали) | Рівні ЕМП, візуальні показники, концентрація шкідливих речовин у повітрі, м'яке рентгенівське випромінювання |
||
| Ігрові автомати з використанням ПЕОМ | Рівні ЕМП, акустичного шуму, концентрація шкідливих речовин у повітрі, візуальні показники ВДТ, м'яке рентгенівське випромінювання |
Продовження додатку 3
Таблиця 2
Рівні звукового тиску в октавних смугах із середньогеометричними частотами
| Рівні звуку в дБА |
|||||||||
Таблиця 3
Тимчасові допустимі рівні ЕМП, створюваних ПЕОМ
| Найменування параметрів | |
| 2 кГц-400 кГц | |
| Щільність магнітного потоку У діапазоні частот 5Гц-2кГц 2 кГц-400кГц | |
| Електричний потенціал екрану відеомонітора 500 В |
|
Продовження додатку 3
Таблиця 4
Допустимі візуальні параметри пристроїв відображення інформації
| Параметри | Допустимі значення |
|
| Яскравість білого поля | Щонайменше 35 кд/кв.метр. |
|
| Не більше +- 20% |
||
| Не менше 3: 1 |
||
| Тимчасова нестабільність зображення (ненавмисна зміна часу яскравості зображення на екрані дисплея) | Не має фіксуватися |
|
| Просторова нестабільність зображення (ненавмисна зміна положення фрагментів зображення на екрані) |
Таблиця 5
Тимчасові допустимі рівні ЕМП, створюваних ПЕОМ на робочих місцях
| Найменування параметрів | |
| Напруженість електричного поля в діапазоні частот 5 Гц-2 кГц 2 кГц-400 кГц | |
| Щільність магнітного потоку У діапазоні частот 5Гц-2кГц 2 кГц-400кГц | |
| Електричний потенціал екрану відеомонітора 15 кВ/м |
|
Продовження додатку 3
Таблиця 6
Оптимальні параметри мікроклімату у всіх типах навчальних та дошкільних приміщень з використанням ПЕОМ
| Температура, З град. | Відносна вологість, % | Абсолютна вологість, куб. | Швидкість руху повітря, м/с |
Таблиця 7
Візуальні параметри ВДТ, контрольовані на робочих місцях
| Параметри | Допустимі значення |
|
| Яскравість білого поля | Щонайменше 35 кд/кв.метр. |
|
| Нерівномірність яскравості робочого поля | Не більше +- 20% |
|
| Контрастність (для монохромного режиму) | Не менше 3: 1 |
|
| Тимчасова нестабільність зображення (миготіння) | Не має фіксуватися |
|
| Просторова нестабільність зображення (тремтіння) | Не більше 2*10^-4L, де L – Проектна відстань спостереження, мм |
СПИСОК ЛІТЕРАТУРИ
1. Медведєв П.П., Баранов І.С., «Глобальні космічні навігаційні системи», ВІНІТІ, серія «Геодезія та аерофотозйомка», 1992. 2. Неумивакін Ю.К., Перський М.І., «Геодезичне забезпечення землевпорядних і кадастрових робіт», Москва «Картгеоцентр» - «Геодезиздат», 1996. 3. «Інструкція з межування земель. Комітет Російської Федерації із земельних ресурсів та землеустрою», Москва, Роскомзем, 1996. 4. «Федеральний закон про державний земельний кадастр», №28-ФЗ в.о. Президента РФ В.В. Путін, Москва Кремль, 2000. 5. «Land Surveyor, GPS Survey System», Trimble Navigation, 1993. 6. «Geodetic Serveyor, Precision surveying system with 6th Observable technology», 1992. 7. "4600SL Land , Trimble Navigation, 1991. 8. Tennissen PJG Quality Control and GPS //GPS for Geodesy (2
Edition), Springer, 1998 r. 9. Антонович К.М. Використання супутникових радіонавігаційних
систем у геодезії. Том I // M., ФГУП «Картгсоцснтр», 2005 10. Геніке А.А., Побединський Г.Г. Глобальні супутникові системи
визначення місцезнаходження та їх застосування у геодезії. // М.,
Картгеоцентр, 2004 11. Гігієнічні вимоги до персональних електронно-обчислювальних машин та організації роботи. Санітарно-епідеміологічні правила та нормативи СанПін 2.2.2/2.4.1340-03 Акопова Н.Є. 2003 12. Д.т.н. Клюшин Г.Б., доц. Маркелова Г.10, к.т.н., проф. Шлаїак В.В.,
Методичні вказівки щодо підготовки випускних кваліфікаційних робіт
для спеціальностей: Астрономогеодезія, Космічна геодезія, Прикладна
геодезія. //М, МІІГАіК 2006 р.
Основна освітня програма 220400. 62 Управління у технічних системах Рівень підготовки бакалавр
Розробка та надання освітніх послуг у галузі середньої, вищої та додаткової професійної освіти, післявузівської освіти; виховна та науково-дослідна робота сертифіковані DQS та ГОСТ Р за ISO 9001:2008
Основна освітня програма вищої професійної освіти Напрям підготовки (42)
Основна освітня програмаРезультати освоєння ООП ВПО визначаються компетенціями, що набувають випускник, тобто. його здатністю застосовувати знання, вміння та особисті якості відповідно до завдань професійної діяльності.
Супутникові навігаційні системи
ДокументАвтоматичне залежне спостереження. Метод спостереження, при якому автоматично забезпечується надходження по лінії передачі даних інформації, що отримується від бортових систем навігації та місцезнаходження, включаючи сигнали
МОУ Парабельська гімназія
Реферат
Супутникові системи зв'язку
Виконав
Горошкіна Ксенія
учениця 11 класу
Перевірив
Борисов Олександр Володимирович
Парабель
2010 рік
Вступ 3
1. Принципи організації супутникових каналів 4
2. Орбіти супутників зв'язку 5
3. Типова схема організації послуг супутникового зв'язку 6
4. Сфери застосування супутникового зв'язку 6
4.1.Принципи організації супутникової зв'язку VSAT 7
4.2.Принципи організації рухомого супутникового зв'язку 7
5. Технології, що використовуються у супутниковому зв'язку 8
6. Історія створення супутникових систем зв'язку 11
6.1. Перші супутникові лінії зв'язку та мовлення через ШСЗ "Блискавка-1" 12
6.2. Перша у світі супутникова система "Орбіта" для розподілу ТВ-програм 13
6.3. Перша у світі система безпосереднього ТБ-мовлення "Екран" 14
6.4. Системи розподілу ТВ-програм "Москва" та "Москва-Глобальна 15
6.5. Система супутникового ТВ-мовлення в діапазоні 12 ГГц 16
6.6. Створення системи "Інтерсупутник" 16
6.7. Створення супутникової лінії урядового зв'язку 17
6.8. Наприкінці… 17
Список використаної літератури 20
Вступ
Супутникові системи зв'язку (ССC) відомі давно, і використовуються для передачі різних сигналівна протяжні відстані. З моменту появи супутниковий зв'язок стрімко розвивалася, і в міру накопичення досвіду, вдосконалення апаратури, розвитку методів передачі сигналів стався перехід від окремих ліній супутникового зв'язку до локальних і глобальних систем.
Такі темпи розвитку ССC пояснюються низкою переваг, якими вони мають. До них, зокрема, відносяться велика пропускна здатність, необмежені простори, що перекриваються, висока якість і надійність каналів зв'язку. Ці переваги, які визначають широкі можливості супутникового зв'язку, роблять його унікальним та ефективним засобом зв'язку. Супутниковий зв'язок на даний час є основним видом міжнародного та національного зв'язку на великі та середні відстані. Використання штучних супутників Землі для організації зв'язку продовжує розширюватися з розвитком існуючих мереж зв'язку. Багато країн створюють власні національні мережі супутникового зв'язку.
У нашій країні створюється єдина автоматизована система зв'язку. Для цього розвиваються, удосконалюються і знаходять нові сфери застосування різні технічні засоби зв'язку.
У своєму рефераті я розгляну принципи організації супутникових систем, сфери застосування, створення ССС. У наш час супутниковому мовленню приділяється велика увага, тому ми маємо знати принцип роботи системи.
1. Принципи організації супутникових каналів зв'язку
Супутниковий зв'язок - один із видів радіозв'язку, заснований на використанні штучних супутників землі як ретранслятори.
Супутниковий зв'язок здійснюється між земними станціями, які можуть бути як стаціонарними, і рухливими. Супутниковий зв'язок є розвитком традиційного радіорелейного зв'язку шляхом винесення ретранслятора на велику висоту (від сотень до десятків тисяч кілометрів). Так як зона його видимості в цьому випадку – майже половина Земної кулі, то необхідність у ланцюжку ретрансляторів відпадає. Для передачі через супутник сигнал має бути модульований. Модуляція проводиться на земної станції. Модульований сигнал посилюється, переноситься на потрібну частоту і надходить на антену, що передає.
У перші роки досліджень використовувалися пасивні супутникові ретранслятори, які являли собою простий відбивач радіосигналу (часто - металева або полімерна сфера з металевим напиленням), що не несе на борту будь-якого обладнання, що приймає. Такі супутники не набули поширення. Усі сучасні супутники зв'язку є активними. Активні ретранслятори обладнані електронною апаратурою для прийому, обробки, посилення та ретрансляції сигналу. Супутникові ретранслятори можуть бути нерегенеративними та регенеративними.
Нерегенеративний супутник, прийнявши сигнал від однієї земної станції, переносить його на іншу частоту, посилює та передає іншій земній станції. Супутник може використовувати кілька незалежних каналів, які здійснюють ці операції, кожен з яких працює з певною частиною спектра (ці канали обробки називають транспондерами).
Регенеративний супутник здійснює демодуляцію прийнятого сигналуі наново модулює його. Завдяки цьому виправлення помилок проводиться двічі: на супутнику та на земній станції, що приймає. Недолік цього - складність (отже, набагато вищу ціну супутника), і навіть збільшена затримка передачі сигналу.
2. Орбіти супутників зв'язку
Орбіти, на яких розміщуються супутникові ретранслятори, поділяють на три класи:
1 – екваторіальні, 2 – похилі, 3 – полярні
Важливим різновидом екваторіальної орбіти є геостаціонарна орбіта, на якій супутник обертається з кутовою швидкістю, що дорівнює кутової швидкості Землі, у напрямку, що збігається з напрямком обертання Землі. Очевидною перевагою геостаціонарної орбіти і те, що приймач у зоні обслуговування «бачить» супутник постійно. Однак геостаціонарна орбіта одна і всі супутники вивести на неї неможливо. Іншим її недоліком є велика висота, а значить, і більша ціна виведення супутника на орбіту. Крім того, супутник на геостаціонарній орбіті нездатний обслуговувати земні станції у приполярній області.
Похила орбітадозволяє вирішити ці проблеми, однак через переміщення супутника щодо наземного спостерігача необхідно запускати не менше трьох супутників на одну орбіту, щоб забезпечити цілодобовий доступ до зв'язку.
Полярна орбіта- граничний випадок похилої.
З використанням похилих орбіт земні станції обладнуються системами стеження, здійснюють наведення антени на супутник. Станції, що працюють із супутниками, що знаходяться на геостаціонарній орбіті, як правило, також обладнуються такими системами, щоб компенсувати відхилення від ідеальної геостаціонарної орбіти. Виняток становлять невеликі антени, що використовуються для прийому супутникового телебачення: їхня діаграма спрямованості досить широка, тому вони не відчувають коливань супутника біля ідеальної точки. Особливістю більшості систем рухомого супутникового зв'язку є невеликий розмір антени терміналу, що ускладнює прийом сигналу.
3. Типова схема організації послуг супутникового зв'язку
- оператор супутникового сегментастворює за рахунок власних коштів супутник зв'язку, розміщуючи замовлення виготовлення супутника в одного з виробників супутників, і здійснює його запуск та обслуговування. Після виведення супутника на орбіту оператор супутникового сегмента починає надання послуг зі здачі у найм частотного ресурсу супутника-ретранслятора компаніям-операторам послуг супутникового зв'язку.
- компанія-оператор послуг супутникового зв'язку укладає договір з оператором супутникового сегмента на використання (оренду) ємностей на супутнику зв'язку, використовуючи його як ретранслятор з великою територією обслуговування. Оператор послуг супутникового зв'язку вибудовує наземну інфраструктуру своєї мережі на певній технологічній платформі, що випускається компаніями-виробниками наземного обладнання супутникового зв'язку.
4. Сфери застосування супутникового зв'язку:
- Магістральний супутниковий зв'язок:Спочатку виникнення супутникового зв'язку продиктовано потребами передачі великих обсягів інформації. З часом частка передачі мови у загальному обсязі магістрального трафіку постійно знижувалася, поступаючись місцем передачі даних. З розвитком волоконно-оптичних мереж останні почали витісняти супутниковий зв'язок із ринку магістрального зв'язку.
- Системи VSAT: системи VSAT (Very Small Aperture Terminal - термінал з дуже маленькою апертурою антени) надають послуги супутникового зв'язку клієнтам (як правило, невеликим організаціям), яким не потрібна висока пропускна здатність каналу. Швидкість передачі для VSAT-терміналу зазвичай не перевищує 2048 кбіт/с. Слова «дуже маленька апертура» відносяться до розмірів антен терміналів у порівнянні з розмірами старіших антен магістральних систем зв'язку. VSAT-термінали, що працюють в C-діапазоні, зазвичай використовують антени діаметром 1,8-2,4 м, Ku-діапазоні - 0,75-1,8 м. У системах VSAT застосовується технологія надання каналів на вимогу.
- Системи рухомого супутникового зв'язку: особливістю більшості систем рухомого супутникового зв'язку є невеликий розмір антени терміналу, що ускладнює прийом сигналу.
4.1.Принципи організації супутникового зв'язку VSAT:
 Основний елемент супутникової мережі VSAT – ЦУС. Саме Центр Управління Мережею забезпечує доступ клієнтського обладнання до мережі інтернет, телефонної мережі загального користування, інших терміналів мережі VSAT, реалізує обмін трафіком усередині корпоративної мережі клієнта. ЦУС має широкосмугове підключення до магістральних каналів зв'язку, що надаються магістральними операторами та забезпечує передачу інформації від віддаленого VSAT-терміналу у зовнішній світ.
Основний елемент супутникової мережі VSAT – ЦУС. Саме Центр Управління Мережею забезпечує доступ клієнтського обладнання до мережі інтернет, телефонної мережі загального користування, інших терміналів мережі VSAT, реалізує обмін трафіком усередині корпоративної мережі клієнта. ЦУС має широкосмугове підключення до магістральних каналів зв'язку, що надаються магістральними операторами та забезпечує передачу інформації від віддаленого VSAT-терміналу у зовнішній світ.
4.2.Принципи організації рухомого супутникового зв'язку:
Для того, щоб потужність сигналу, що досягає мобільного супутникового приймача, була достатньою, застосовують одне з двох рішень:
- Супутники розміщуються на геостаціонарній орбіті. Оскільки ця орбіта віддалена від Землі на відстань 35 786 км, на супутник потрібно встановити потужний передавач.
- Безліч супутників розташовується на похилих чи полярних орбітах. При цьому необхідна потужність передавача не така висока, і вартість виведення супутника на орбіту нижча. Однак такий підхід вимагає не тільки великої кількості супутників, а й розгалуженої мережі наземних комутаторів.
- Устаткування клієнта (мобільні супутникові термінали, супутникові телефони) взаємодіє із зовнішнім світом або один з одним за допомогою супутника-ретранслятора та станцій сполучення оператора послуг мобільного супутникового зв'язку, що забезпечують підключення до зовнішніх наземних каналів зв'язку (телефонної мережі загального користування, мережі інтернет та ін.)

5. Технології, що використовуються у супутниковому зв'язку
М багаторазове використання частот у супутниковому зв'язку.Оскільки радіочастоти є обмеженим ресурсом, необхідно забезпечити можливість використання тих самих частот різними земними станціями. Зробити це можна двома способами:
- просторовий поділ - кожна антена супутника приймає сигнал лише з певного району, причому різні райони можуть використовувати одні й самі частоти.
- поляризаційний поділ - різні антени приймають і передають сигнал у взаємно перпендикулярних площинах поляризації, при цьому ті самі частоти можуть застосовуватися два рази (для кожної з площин).
Ч астотні діапазони.
Вибір частоти передачі даних від земної станції до супутника і від супутника до земної станції перестав бути довільним. Від частоти залежить, наприклад, поглинання радіохвиль в атмосфері, а також необхідні розміри передавальної та приймальної антен. Частоти, на яких відбувається передача від земної станції до супутника, відрізняються від частот, що використовуються передачі від супутника до земної станції (як правило, перші вище). Частоти, які використовуються у супутниковому зв'язку, поділяють на діапазони, що позначаються літерами:
| Назва діапазону |
Частоти |
Застосування |
| Рухомий супутниковий зв'язок |
||
| Рухомий супутниковий зв'язок |
||
| 4 ГГц, 6 ГГц |
Фіксований супутниковий зв'язок |
|
| Для супутникового зв'язку у цьому діапазоні частоти не визначені. Для програм радіолокації вказаний діапазон 8-12 ГГц. |
Фіксований супутниковий зв'язок (для військових цілей) |
|
| 11 ГГц, 12 ГГц, 14 ГГц |
||
| Фіксований супутниковий зв'язок, супутникове мовлення |
||
| Фіксований супутниковий зв'язок, міжсупутниковий зв'язок |
Ku-діапазон дозволяє робити прийом порівняно невеликими антенами, і тому використовується в супутниковому телебаченні (DVB), незважаючи на те, що в цьому діапазоні погодні умови істотно впливають на якість передачі. Для передачі даних великими користувачами (організаціями) часто використовується C-діапазон. Це забезпечує більш високу якість прийому, але потребує чималих розмірів антени.
М одуляція та завадостійке кодування
Особливістю супутникових систем зв'язку є необхідність працювати в умовах порівняно низького відношення сигнал/шум, спричиненого кількома факторами:
- значною віддаленістю приймача від передавача,
- обмеженою потужністю супутника
Супутниковий зв'язок погано підходить передачі аналогових сигналів. Тому передачі мови її попередньо оцифровують, використовуючи імпульсно-кодову модуляцію.
Для передачі цифрових даних супутниковому каналузв'язку вони повинні бути спочатку перетворені на радіосигнал, що займає певний Частотний діапазон. І тому застосовується модуляція (цифрова модуляція називається також маніпуляцією).
Через низьку потужність сигналу виникає необхідність у системах виправлення помилок. Для цього застосовуються різні схеми завадостійкого кодування, найчастіше різні варіанти згорткових кодів, а також турбо-коди.
6. Історія створення супутникових систем зв'язку
Ідея створення Землі глобальних систем супутникового зв'язку було висунуто 1945 р. Артуром Кларком, який згодом став знаменитим письменником-фантастом. Реалізація цієї ідеї стала можливою лише через 12 років після того, як з'явилися балістичні ракети, за допомогою яких 4 жовтня 1957 р.на орбіту було запущено перший штучний супутник Землі (ІСЗ). Для контролю за польотом ШСЗ на ньому був поміщений маленький радіопередавач - маяк, що працює в діапазоні 27 МГц. Через кілька років 12 квітня 1961 р. вперше у світі радянською космічному кораблі"Схід" Ю.А. Гагарін здійснив історичний обліт Землі. При цьому космонавт мав регулярний зв'язок із Землею по радіо. Так розпочалася систематична робота з вивчення та використання космічного простору для вирішення різних мирних завдань.
Створення космічної техніки уможливило розвиток дуже ефективних систем дальнього радіозв'язку та мовлення. У США почалися інтенсивні роботизі створення зв'язкових супутників. Такі роботи почали розгортатися і нашій країні. Її величезна територія та слабкий розвиток зв'язку, особливо в малонаселених східних районах, де створення мереж зв'язку за допомогою інших технічних засобів (РРЛ, кабельні лінії та ін) пов'язане з великими витратами, робило цей новий вид зв'язку досить перспективним.
Біля джерел створення вітчизняних супутникових радіосистем стояли видатні вітчизняні вчені та інженери, які очолювали великі наукові центри: М.Ф. Решетнєв, М.Р. Капланів, Н.І. Калашніков, Л.Я. Кантор
Основні завдання, що ставляться перед вченими, полягали в наступному:
Розробка супутникових ретрансляторів телевізійного мовлення та зв'язку ("Екран", "Райдуга", "Галс"), з 1969 р. супутникові ретранслятори розроблялися в окремій лабораторії, очолюваній М.В. Бродським ;
Створення системних проектів побудови супутникового зв'язку та мовлення;
Розробка апаратури земних станцій (ЗС) супутникового зв'язку: модульаторів, порогознижуючих демодуляторів ЧС (частотної модуляції) сигналів, приймальних та передавальних пристроїв та ін;
Проведення комплексних робіт із оснащення обладнанням станцій супутникового зв'язку та мовлення;
Розробка теорії стежать ЧС демодуляторів зі зниженим шумовим порогом, методів багатостанційного доступу, методів модуляції та завадостійкого кодування;
Розробка нормативно-технічної документації на канали, тракти телевізійного та зв'язкового обладнання супутникових систем;
Розробка систем управління та контролю ЗС та мережами супутникового зв'язку та мовлення.
Фахівцями НДІР було створено багато національних супутникових систем зв'язку та мовлення, що перебувають в експлуатації і понині. Прийомно-передавальне наземне та бортове обладнання цих систем також було розроблено в НДІР. Крім обладнання фахівці інституту запропонували методики проектування як самих супутникових систем, так і окремих пристроїв, що входять до їх складу. Досвід проектування супутникових систем зв'язку фахівців НДІР відображено у численних наукових публікаціях та монографіях.
6.1. Перші супутникові лінії зв'язку та мовлення через ШСЗ "Блискавка-1"
Перші експерименти з супутникового зв'язку шляхом відображення радіохвиль від американського відбиваючого супутника "Эхо" і Місяця, що використовуються як пасивні ретранслятори, проводилися фахівцями НДІР 1964 р. Радіотелескопом в обсерваторії у селищі Зименки Горьківської області було прийнято телеграфні повідомлення та простий малюнок з англійської обсерваторії "Джодрелл Бенк".
Цей експеримент довів можливість успішного використання космічних об'єктів організації зв'язку Землі.
У лабораторії супутникового зв'язку було підготовлено кілька системних проектів, а потім вона взяла участь у розробці першої вітчизняної системи супутникового зв'язку "Блискавка-1" у діапазон частот нижче 1 ГГц.Головною організацією створення цієї системи був Московський науково-дослідний інститут радіозв'язку (МНДІРС). Головним конструктором системи "Блискавка-1" є М.Р. Капланов- заступник керівника МНДІРС.
У 60-ті роки в НДІР велася розробка приймально-передавального комплексу тропосферної радіорелейної системи "Обрій", що також працює в діапазоні частот нижче 1 ГГц. Цей комплекс був модифікований і створена апаратура, названа "Горизонт-К", використовувалася для оснащення першої супутникової лінії зв'язку "Блискавка-1", що зв'язала Москву та Владивосток. Ця лінія призначалася передачі ТВ-програми чи групового спектру 60 телефонних каналів. За участю фахівців НДІР у цих містах було обладнано дві земні станції (ЗС). У МНДІРС було розроблено бортовий ретранслятор першого штучного супутника зв'язку "Блискавка-1", успішний запуск якого відбувся 23 квітня 1965 р. Він був виведений на високоеліптичну орбіту з періодом звернення навколо Землі 12 год. Така орбіта була зручна обслуговування території СРСР, розташованої у північних широтах, оскільки протягом восьми годин кожному витку ШСЗ було видно з будь-якої точки країни. Крім того, запуск на таку орбіту з нашої території здійснюється із меншими витратами енергії, ніж на геостаціонарну. Орбіта ШСЗ "Блискавка-1" зберегла своє значення і досі використовується, незважаючи на переважний розвиток геостаціонарних ШСЗ.
6.2. Перша у світі супутникова система "Орбіта" для розподілу ТВ-програм
Після завершення досліджень технічних можливостей ШСЗ "Блискавка-1" фахівцями НДІР Н.В. Тализіним та Л.Я. Канторомбуло запропоновано вирішити проблему подачі ТБ-програм центрального телебачення до східних районів країни шляхом створення першої у світі системи супутникового мовлення "Орбіта" діапазон 1 ГГц на базі апаратури "Горизонт-К".
У 1965-1967 pp.у рекордно короткі терміни у східних районах нашої країни було одночасно споруджено та введено в дію 20 земних станцій "Орбіта" та нова центральна передавальна станція "Резерв". Система "Орбіта" стала першою у світі циркулярною, телевізійною, розподільчою супутниковою системою, у якій найефективніше використані можливості супутникового зв'язку.
Слід зазначити, що діапазон, у якому працювала нова система"Орбіта" 800-1000 МГц, не відповідав тому, що був розподілений відповідно до Регламенту радіозв'язку для фіксованої супутникової служби. Робота з переведення системи "Орбіта" до С-діапазону 6/4 ГГц була виконана фахівцями НДІР у період 1970-1972 рр. Станція, що функціонує в новому діапазоні частот, одержала назву "Орбіта-2". Для неї було створено повний комплекс апаратури для роботи в міжнародному діапазоні частот – на ділянці Земля-Космос – у діапазоні 6 ГГц, на ділянці Космос-Земля – у діапазоні 4 ГГц. Під керівництвом В.М. Цирлінабула розроблена система наведення та автосупроводу антен з програмним пристроєм. У цій системі використовувалися екстремальний автомат та метод конічного сканування.
Станції "Орбіта-2" почали впроваджуватись з 1972 р., а до кінця 1986 р. їх було збудовано близько 100. Багато з них і в даний час є діючими приймально-передавальними станціями.
Надалі для роботи мережі "Орбіта-2" було створено та виведено на орбіту перший радянський геостаціонарний ШСЗ "Райдуга", багатоствольний бортовий ретранслятор якого створювався в НДІР (керівник роботи А.Д. Фортушенко та її учасники М.В. Бродський, А.В. І. Островський, Ю. М. Фомін та ін.) При цьому були створені та освоєні технологія виготовлення та методи наземної обробки космічних виробів.
Для системи "Орбіта-2" були розроблені нові передавальні пристрої "Градієнт" (І.Е. Мач, М.З. Цейтлін та ін), а також параметричні підсилювачі (А.В. Соколов, Е.Л. Ратбіль, BC Санін, В. М. Крилов) та пристрої прийому сигналів (В. І. Дячков, В. М. Доро феєв, Ю. А. Афанасьєв, В. А. Полухін та ін).
6.3. Перша у світі система безпосереднього ТБ-мовлення "Екран"
Широкий розвиток системи "Орбіта" як засобу подачі ТВ-програм наприкінці 70-х років став економічно невиправданим через велику вартість ЗС, що робить недоцільною її встановлення в пункті з населенням менше 100-200 тис. осіб. Більш ефективною виявилася система "Екран", що працює в діапазоні частот нижче 1 ГГц і має велику потужність передавача бортового ретранслятора (до 300 Вт). Метою створення цієї системи було охоплення ТБ-мовленням малонаселених пунктів у районах Сибіру, Крайньої Півночі та частини Далекого Сходу. Для її реалізації були виділені частоти 714 та 754 МГц, на яких було можливо створити досить прості та дешеві приймальні пристрої. Система "Екран" стала фактично першою у світі системою безпосереднього супутникового мовлення.
Приймальні установки цієї системи мали бути рентабельними як обслуговування невеликих населених пунктів, так індивідуального прийому ТВ-программ.
Перший супутник системи "Екран" було запущено 26 жовтня 1976 р . на геостаціонарну орбіту в точку 99 ° с.д. Дещо пізніше в Красноярську були випущені станції колективного прийому "Екран-КР-1" та "Екран-КР-10" з потужністю вихідного телевізійного передавача 1 і 10 Вт. Земна станція, що передає сигнали на ШСЗ "Екран", мала антену з діаметром дзеркала 12 м, вона була обладнана передавачем "Градієнт" потужністю 5 кВт, що працює в діапазоні 6 ГГц. Прийомні установки цієї системи, розроблені фахівцями НДІР, були найпростішими та найдешевшими приймальними станціями з усіх, реалізованих у ті роки. До кінця 1987 р. кількість встановлених станцій "Екран" досягла 4500 шт.
6.4.Системи розподілу ТВ-програм "Москва" та "Москва-Глобальна"
Подальший прогрес у розвитку систем супутникового ТВ-вещания нашій країні пов'язані з створенням системи " Москва " , у якій технічно застарілі ЗС системи " Орбіта, було замінено малі ЗС. Розробка малих ЗС почалася 1974 р.за ініціативою Н.В. Тализіна та Л.Я. Кантор.
Для системи "Москва" на ШСЗ "Обрій" був передбачений ствол підвищеної потужності, що працює в діапазоні 4 ГГц на вузькоспрямовану антену. Енергетичні співвідношення в системі були обрані таким чином, що забезпечували застосування на приймальні ЗС невеликої параболічної антени з діаметром дзеркала 2,5 м без автоматичного наведення. Принциповою особливістю системи "Москва" було суворе дотримання норм на спектральну щільність потоку потужності біля поверхні Землі, встановлених Регламентом для зв'язку для систем фіксованої служби.. Це дозволяло використовувати цю систему для телебачення на всій території СРСР. Система забезпечувала прийом з високою якістюцентральної ТВ-програми та програми радіомовлення. Згодом у системі було створено ще один канал, призначений передачі газетних шпальт.
Ці станції набули також широкого поширення у вітчизняних установах, розташованих за кордоном (у Європі, на півночі Африки та низці інших територій), що дало змогу нашим громадянам за кордоном приймати вітчизняні програми. При створенні системи "Москва" було використано ряд винаходів та оригінальних рішень, що дозволили удосконалити як побудову самої системи, так і її апаратурні комплекси. Ця система послужила прототипом для багатьох супутникових систем, створених пізніше у США та Західної Європи, в яких для подачі програм ТБ на ЗС малого розміру та помірної вартості використовувалися ШСЗ середньої потужності, що працюють у діапазоні фіксованої супутникової служби.
Протягом 1986-1988 років.була проведена розробка спеціальної системи "Москва-Глобальна" з малими ЗС, призначеною для подачі центральних ТВ-програм до вітчизняних представництв за кордоном, а також передачі невеликого обсягу дискретної інформації. Ця система також перебуває в експлуатації. У ній передбачено організацію одного ТВ-каналу, трьох каналів для передачі дискретної інформації зі швидкістю 4800 біт/с та двох каналів зі швидкістю 2400 біт/с. Канали передачі дискретної інформації використовувалися на користь Комітету з телебачення і радіомовлення, ТАРС та АПН (Агентство політичних новин). Для охоплення практично всієї території Земної кулі в ній використовуються два супутники, розташовані на геостаціонарній орбіті на 11° з.д. і 96 ° с.д. Приймальні станції мають дзеркало діаметром 4 м, апаратура може розташовуватись як у спеціальному контейнері, так і в приміщенні.
6.5. Система супутникового ТБ-мовлення в діапазоні 12 ГГц
З 1976 р. в НДІР почалися роботи зі створення принципово нової в ті роки системи супутникового телебачення у виділеному за міжнародним планом для такого супутникового ТБ-мовлення діапазоні частот 12 ГГц (СТВ-12), яка не мала б обмежень щодо випромінюваної потужності, властивих системам "Екран" та "Москва" і могла б забезпечити охоплення всієї території нашої країни багатопрограмним ТБ-мовленням, а також обмін програмами та вирішення проблеми республіканського мовлення. У створенні цієї системи НДІР був головною організацією.
Фахівці інституту провели дослідження, що визначили оптимальні параметри даної системи, та розробили багатоствольні бортові ретранслятори та обладнання передавальної та приймальної ЗС. На першому етапі розвитку цієї системи використовувався вітчизняний супутник "Галс", сигнали передавалися в аналоговому вигляді, використовувалося імпортне приймальне обладнання. Пізніше було здійснено перехід на цифрове обладнанняна базі іноземного супутника, а також передавального та приймального обладнання.
6.6. Створення системи "Інтерсупутник"
У 1967 р.почався розвиток міжнародного співробітництва соціалістичних країн у галузі супутникового зв'язку. Метою його було створення міжнародноюсупутникової системи "Інтерсупутник", призначеної для задоволення потреб Болгарії, Угорщини, Німеччини, Монголії, Польщі, Румунії, СРСР та Чехословаччини у телефонному зв'язку, передачі даних та обміні ТВ-програмами . У 1969 р.були розроблені проект цієї системи, юридичні основи організації "Інтерсупутник", а 1971 р.підписано угоду про її створення.
Система "Інтерсупутник" стала другою у світі між народною системою супутникового зв'язку (після системи "Інтелсат"). Фахівці НДІР розробили проекти ЗС, які за сприяння СРСР були побудовані в багатьох країнах соціалістичної співдружності. Перша ЗС там була створена Кубі, а друга - у Чехословаччини. Усього НДІР поставив за кордон більше десяти ЗС для прийому програм ТБ, ЗВ та спеціального призначення.
Спочатку в "Інтерсупутнику" використовувався ШСЗ типу "Блискавка-3" на високоеліптичній орбіті, а з 1978 - два багатоствольних геостаціонарних супутника типу "Горизонт" з точками стояння 14° з.д. і 53 ° (а потім 80 °) с.д. На ЗС спочатку було встановлено передавач "Градієнт-К" та приймальний комплекс "Орбіта-2".
Усі системні та технічні рішення щодо створення системи "Інтерсупутник", а також апаратура ЗС створювалися фахівцями НДІР спільно з дослідним заводом НДІР "Промзв'язок радіо" та організаціями-співвиконавцями. Система "Інтерсупутник" знаходиться в експлуатації і сьогодні, орендуючи стволи космічного угруповання РФ, а також використовуючи свій геостаціонарний супутник LMI-1, що знаходиться на позиції 75 ° с.д. Роботи проводилися в кооперації з ВО "Іскра" (Красноярськ), Московським та Подільським радіотехнічними заводами.
Керівником робіт був С.В. Бородич .
6.7. Створення супутникової лінії урядового зв'язку
У 1972 р. було укладено міжурядову угоду між СРСР та США про створення прямої лінії урядового зв'язку (ЛПС) між главами держав на випадок надзвичайних обставин. Виконання цієї важливої урядової угоди було доручено фахівцям НДІР. Головним конструктором розробки ЛПС став В.Л. Биків, а відповідальними виконавцями - І.А. Ястребцов, О.М. Воробйов.
На території СРСР було створено дві ЗС: одну (у Дубні під Москвою), другу (у Золочеві під Львовом). Введення ЛПС в експлуатацію відбулося 1975 р. Вона діє через ЗС "Дубна" досі. Це був перший досвід роботи зі створення вітчизняними фахівцями супутникової лінії міжнародної системи"Інтелсат".
6.8. У підсумку…
У 1960-1980 pp. фахівці НДІР вирішували дуже важливі для нашої держави та складні у технічному відношенні проблеми створення національних систем супутникового зв'язку та мовлення.
· Були створені системи розподілу ТВ-програм на широкій території нашої країни, у тому числі - безпосереднього супутникового телемовлення. Багато систем, створені в НДІР, були першими у світі: "Орбіта", "Екран", "Москва" та ін Устаткування наземної частини цих систем, а також бортове обладнання - також розробка НДІР, воно вироблялося вітчизняною промисловістю.
· Супутникові системи зв'язку та мовлення дозволили задовольнити потреби десятків мільйонів громадян нашої країни, особливо тих, хто проживав у малонаселених районах Західного Сибіру та Далекого Сходу. Зі створенням супутникових систем у цих регіонах у громадян вперше з'явилася можливість приймати програми центрального телебачення у реальному часі.
· Впровадження супутникових систем мало виключно важливе значення для економічного та соціального розвитку як важкодоступних регіонів Сибіру та Далекого Сходу, так і всієї країни.
· Населення Сахаліну, Камчатки, Хабаровського краю та багатьох інших віддалених територій отримало доступ до телефонної мережі загального користування.
· Вчені НДІР виконали оригінальні наукові дослідження, Спрямовані створення методик розрахунку різного роду пристроїв, що застосовуються в системах супутникового зв'язку. Ними також було створено методологію проектування систем супутникового зв'язку та написано низку фундаментальних монографій та наукових статей з проблем супутникового зв'язку.
Висновок
Сучасні організації характеризуються великим обсягом різної інформації, в основному електронної та телекомунікаційної, яка проходить через них щодня. Тому важливо мати високоякісний вихід на комутаційні вузли, які забезпечують вихід на всі важливі комунікаційні лінії. У Росії, де відстані між населеними пунктами величезне, а якість наземних ліній залишає бажати кращого, оптимальним вирішенням цього питання є застосування супутникового зв'язку (ССС).
Спочатку ССС використовувалися передачі ТБ-сигналу. Наша країна характеризується великою територією, яку слід охопити засобами комунікації. Зробити це стало простіше після появи супутникового зв'язку, зокрема системи Орбіта-2. З'явилися супутникові телефони, головною перевагою яких є незалежність від наявності будь-яких місцевих телефонних мереж. Якісний телефонний зв'язок доступний практично з будь-якої точки земної кулі.
У рамках президентської програми «Універсальна послуга зв'язку» у кожному населеному пункті було встановлено телефони, в особливо віддалених районах було використано саме супутникові телефони.
Відповідно до федеральної цільової програми "Розвиток телерадіомовлення в Російській Федерації на 2009-2015 роки" відбувається впровадження цифрового мовлення в Росії. Програму повністю профінансовано, зокрема кошти підуть і створення багатофункціональних супутників.
Список використаної літератури
1. Інтернет-ресурс «Історія супутникового зв'язку» http://sviazist.nnov.ru/modules/myarticles/article.php?storyid=1026
2.Інтернет-ресурс «Принципи організації супутникового зв'язку» http://vsatinfo.ru/index.php?option=com_sobi2&catid=30&Itemid=0
3. Інтернет ресурс «Вільна енциклопедія»
http://ua.wikipedia.org
Рецензія
на реферат «Супутникові системи зв'язку»
Учениці 11 кл. МОУ Парабельськоїгімназії
Горошкіної Ксенії
Тема реферату розкрита повністю. Матеріал усіх розділів цікавий, викладений доступно та чітко. Гарні ілюстрації. Структура реферату дотримано. Роботу можна використовувати як навчальний посібник учнів.
Оцінка відмінно"
Експерт: Борисов А. В. вчитель фізики
Навчальні питання:
1. Принципи побудови супутникових систем передачі.
2. Багатостанційний доступ.
3. Вимоги нормативних документів при побудові та застосуванні супутникових та радіорелейних систем передачі.
1. Принципи побудови супутникових систем передачі.
Принципи побудови супутникових систем передачі – ССП. Запуском 4 жовтня 1957 першого штучного супутника Землі (ІСЗ) в Радянському Союзі було покладено початок освоєння навколоземного космічного простору. Одним з найважливіших практичних застосувань ШСЗ є космічний радіозв'язок міжземними станціями (ЗС), що здійснюється за допомогою ретрансляції сигналів через один або кілька ШСЗ зв'язкового призначення. Така передача сигналів покладена в основу супутникових систем передачі, що є РРЛ з однією проміжною станцією, розміщеної на ШСЗ. При побудові ССП використовують ідеї та принципи, що реалізуються в РРЛ.
Супутникові системи передачі мають ряд істотних особливостей, що відрізняють їх як від РРЛ прямої видимості, так і від далеких ТРРЛ. Так, функціонування ССП можливе за наявності ряду спеціальних підсистем. Зважаючи на це, ССП виділяють у самостійний вид систем передачі повідомлень. Власне ССП, звана зв'язковою системою, включає ряд підсистем:
Космічну, до складу якої входить ракета-носій і стартовий комплекс, що забезпечує виведення ШСЗ на відповідну орбіту;
Командно-вимірювальну, що має земну та бортову (встановлену на супутнику) частини, призначену для вимірювання параметрів орбіти супутника та передачі із Землі команд управління;
Телеметричну, передавальна частина, якої знаходиться на борту ШСЗ, а приймальня на Землі, що служить для передачі даних про стан апаратури супутника, а також про проходження команд тиску.
За способом ретрансляції сигналу ССП ділять на системи з пасивною та активною ретрансляцією.
Система, яка працює без бортової апаратури, називається системою зв'язку з пасивним супутником або системою з пасивною ретрансляцією. У такій системі сигнали, надіслані із Землі, відбиваються поверхнею ШСЗ назад без попереднього посилення. Як пасивні супутники можуть використовуватися як спеціальні відбивачі різної форми (у вигляді сферичних балонів, об'ємних багатогранників та ін), так і природний супутникЗемлі - Місяць.
При достатньому посиленні земних приймальних антен та високої чутливості приймача земної станції (ЗС) цей метод радіозв'язку знаходить застосування в системах малої пропускної спроможності.
Система радіозв'язку за наявності бортової апаратури називається системою з активною ретрансляцією сигналу або системою з активним супутником. При цьому енергопостачання бортового ретранслятора здійснюється від сонячних батарей, що знаходяться на ШСЗ. Активна ретрансляція є основною у сучасних ССП. Приблизна структурна схема дуплексного зв'язку між двома земними станціями (ЗС) при активній ретрансляції сигналу наведена на малюнку 1. Сигнал U 1, що передається в одному напрямку, підводиться до модулятора земної станції (Мод ЗС), в результаті чого здійснюється модуляція несучої частоти f 1. Ці коливання від передавача земної станції (Пер ЗС) підводяться до антени Ан1 і випромінюються у напрямку ШСЗ, де приймаються бортовою антеною БАн бортового ретранслятора (БР). Далі коливання з частотою f 1 надходять на напрямні фільтри (НФ), посилюються першим приймачем бортового ретранслятора (1-й ПРбр), перетворюються на частоту f 2 і надходять до першого передавача бортового ретранслятора (1-й ПЕРбр). З виходу цього передавача коливання з частотою f 2 через НФ підводяться до бортової антени БАн і випромінюються у бік Землі. Ці коливання приймаються антеною Ан2 і підводяться до приймача земної станції ПрЗС та детектора земної станції Дет ЗС, на виході якого виділяється сигнал U 1 . Передача від протилежної сигналу ЗС U 2 відбувається на частоті f 3 аналогічним чином, причому на бортовому ретрансляторі здійснюється перетворення коливань з несучою частотою f З коливання з частотою f 4 .
Земні станції з'єднуються з вузлами комутації мережі зв'язку, з джерелами та споживачами типових каналів та трактів, програм телебачення та звукового мовленняза допомогою наземних сполучних ліній.
Дуже поширеним та економічно вигідним є використання зв'язкових ШСЗ для організації ТБ та радіомовлення. В даний час під супутниковим ТБ та радіомовленням розуміється як передача ТБ сигналів (зі звуковим супроводом), так і радіомовних звукових сигналів від одного або декількох земних передавачів, пов'язаних з центрами формування ТБ і радіопрограм, через ШСЗ на мережу земних приймальних установок та розподіл цих програм з метою доведення їх до абонентів (телеглядачів або радіослухачів) за допомогою наземних засобів зв'язку (ретрансляторів різної потужності, систем кабельного телебачення- СКТВ, засобів колективного та індивідуального прийому). Як правило, у зоні обслуговування зв'язковим ШСЗ розташовується мережа приймальних ЗС різних типів.
Малюнок 1. Структурна схемарадіозв'язку через ШСЗ
Залежно від типу ЗС та призначення систем супутникового зв'язку розрізняють такі служби радіозв'язку:
Фіксована супутникова служба (ФСС) - служба радіозв'язку між ЗС, розташованими у певних фіксованих пунктах, при використанні одного або кількох супутників;
Рухлива супутникова служба - між рухомими ЗС за участю одного або кількох ШСЗ;
Радіомовна супутникова служба (РВСС) - служба радіозв'язку, у якій сигнали супутникових ретрансляторів призначені безпосереднього прийому населенням. При цьому безпосереднім вважається як індивідуальний, так і колективний прийом на порівняно прості та недорогі настанови з відповідною якістю.
Орбіти зв'язкових штучних супутників Землі - це траєкторії руху ШСЗ у просторі. Вони визначаються багатьма чинниками, основним у тому числі є тяжіння супутника Землею.
Ряд інших чинників: гальмування супутника у атмосфері Землі, вплив Місяця, Сонця, планет - також впливає орбіту супутника. Це дуже мало і враховується як так званого обурення орбіти супутника, тобто. відхилення істинної траєкторії від ідеальної, обчисленої у припущенні, що супутник рухається лише під впливом тяжіння Землі. Оскільки Земля є тілом складної форми з нерівномірним розподілом маси, то обчислити ідеальну траєкторію складно. У першому наближенні вважають, що супутник рухається у полі тяжіння кулястої Землі зі сферично-симетричним розподілом маси. Таке поле тяжіння називається центральним. Основні параметри, що характеризують рух ШСЗ, можна визначити за допомогою законів Кеплера.
Стосовно супутників Землі закони Кеплера формулюються так:
Перший закон Кеплера: орбіта супутника Землі лежить у нерухомій площині, що проходить через центр Землі, і є еліпсом, в одному з фокусів якого знаходиться центр Землі.
Другий закон Кеплера: радіус-вектор супутника (відрізок прямий, що з'єднує супутник, що знаходиться на орбіті, і центр Землі) у рівні проміжки часу описує рівні площі.
Третій закон Кеплера: відношення квадратів періодів обігу супутників дорівнює відношенню кубів великих півосей орбіт.
У системах зв'язку можуть використовуватися ШСЗ, що рухаються орбітами, які відрізняються наступними параметрами: формою (кругова або еліптична); висотою над поверхнею Землі Н або відстанню від центру Землі; нахилом, тобто. кутом φ між екваторіальною площиною та площиною орбіти. Залежно від обраного кута φ, орбіти поділяються на екваторіальні (φ = 0), полярні (φ = 90°) та похилі орбіти (0< φ < 90°). Эллиптические орбиты, кроме того, характеризуются апогеем и перигеем, т.е. расстояниями от Земли, соответственно, до наиболее удаленной и до ближайшей точки орбиты. Апогей и перигей орбиты являются концами большой оси эллипса, а линия, на которой они находятся, называется осью апсид. При высоте орбиты 35 800 км период обращения ИСЗ будет равен земным суткам. Экваториальная круговая орбита с высотой 35 800 км при условии, что направление движения спутника совпадает с направлением вращения Земли относительно своей оси (с запада на восток), называется геостационарной орбитой (ГСО). Такая орбита является универсальной и единственной. Спутник, находящийся на ней, будет казаться земному наблюдателю неподвижным. Подобный ИСЗ называется геостационарным. В действительности ИСЗ, математически точно запущенный на ГСО, не остается неподвижным, а из-за эллиптичности Земли и по причине возмущения орбиты медленно уходит из заданной точки и совершает периодические (суточные) колебания по долготе и широте. Поэтому на ИСЗ должна быть установлена система автоматической стабилизации и удержания его в заданной точке ГСО.
Більшість сучасних ССП базується на геостаціонарних супутниках. Однак у деяких випадках цікавить сильно витягнуті еліптичні орбіти, мають такі параметри: кут способу φ = 63,5°, висота в апогеї приблизно 40 000 км, у перигеї близько 500 км. Для Росії з її великою територією за Полярним колом така орбіта дуже зручна. Супутник, виведений її у, обертається синхронно із Землею, має період звернення 12 год і, роблячи протягом доби два повних витка, з'являється з одними й тими самими районами Землі у той самий час. Тривалість сеансу зв'язку між ЗС, що перебувають біля Росії, у своїй становить 8 год. Задля забезпечення цілодобового зв'язку доводиться виводити на еліптичні орбіти, площини яких взаємно зміщені, 3...4 супутника, які утворюють систему супутників.
Останнім часом намітилася тенденція використання зв'язкових ШСЗ, що є низьких орбітах (відстань до Землі не більше 700... 1500 км). Системи зв'язку з використанням ШСЗ на низьких орбітах завдяки значно меншій (практично в 50 разів) відстані від Землі до супутника мають низку переваг перед СПЗ на геостаціонарних супутниках. По-перше, це менше запізнення і згасання сигналу, що подається, а по-друге, більш простий виведення ШСЗ на орбіту. Основним недоліком подібних систем є необхідність виведення на орбіту великої кількості супутників для забезпечення тривалого безперервного зв'язку. Це невеликою зоною видимості окремого ШСЗ, що ускладнює зв'язок між абонентами, що перебувають у великій відстані друг від друга. Наприклад, космічний комплекс"lridium" (США) складається з 66 космічних апаратів, розміщених на кругових орбітах з нахилом φ = 86 ° і висотою 780 км. Супутники розміщуються в орбітальних площинах, у кожній одночасно знаходяться 11 супутників. Кутова відстань між сусідніми орбітальними площинами становить 31,6°, за винятком 1-ї та 6-ї площин, кутовий рознесення між якими близько 22°.
Антенна система кожного ШСЗ формує 48 вузьких променів. Взаємодія всіх ШСЗ забезпечує глобальне покриття Землі послугами зв'язку. У нашій країні ведуться роботи зі створення власних низькоорбітальних супутникових систем зв'язку Сигнал і Гонець.
Для з'ясування особливостей роботи низькоорбітальних супутникових систем розглянемо схему проходження ній сигналів (рисунок 2). В цьому випадку на кожній ЗС повинні бути встановлені дві антени (А 1 і A 2), які можуть здійснювати передачу та прийом сигналів за допомогою одного із супутників, що знаходиться в зоні взаємного зв'язку. На малюнку 2 показані ШСЗ, що рухаються за годинниковою стрілкою по одній низькій орбіті, частина якої показана у вигляді дуг mn. Розглянута система супутникового зв'язку працює в такий спосіб. Сигнал від ЗС 1 через антену А 1 надходить на ІС3 4 і ретранслюється через ІС3 3 ІС3 2 ІС3 1 до приймальної антени А 2 ЗС 2 . Таким чином, у цьому випадку для ретрансляції сигналу використовуються антени А 1 і сегмент орбіти, що містить ІС3 4 - ІСЗ 1 . При виході ІС3 4 із зони, що лежить ліворуч від лінії горизонту а-а ’ , передача та прийом сигналу будуть вестись через антени А 2 та сегмент орбіти, що містить ІС3 5 ...ІС3 2 і т.д.
Оскільки кожен ШСЗ може спостерігатися з досить великою територією на поверхні Землі, то можна здійснити зв'язок між кількома ЗС через один загальний зв'язковий ШСЗ. І тут супутник виявляється «доступним» багатьом ЗС, тому така система називається системою супутникового зв'язку з багатостанційним доступом.
Використання ШСЗ, що рухаються по орбіті з малою висотою, спрощує апаратуру ЗС, тому що при цьому можливе зниження посилення земних антен, потужності передавачів та робота з приймачами меншої чутливості, ніж у випадку геостаціонарних супутників. Однак у разі ускладнюється система управління рухом великої кількості ШСЗ по орбіті.
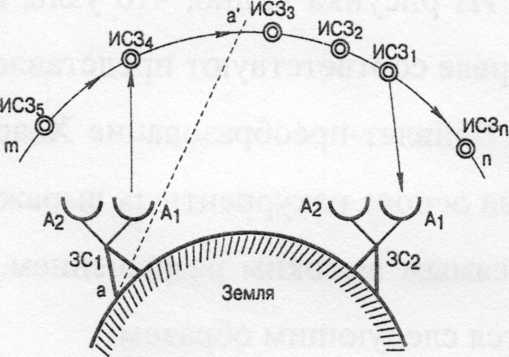
Малюнок 2. Система зв'язку з кількома ШСЗ на низькій орбіті
У стадії розробки знаходиться система зв'язку на основі низькоорбітальних 840 зв'язкових супутників, оснащених скануючими антенними системами з високим коефіцієнтом посилення, що покривають всю поверхню Землі мережею з 20 000 великих зон обслуговування, кожна з яких складатиметься з 9 малих зон. Супутники будуть пов'язані з наземною телекомунікаційною мережею через високопродуктивні ЗС. Однак і самі низькоорбітальні супутникизв'язки сформують незалежну мережу, де кожен із них обмінюватиметься даними із дев'ятьма сусідами, використовуючи високоякісні канали міжсупутникового зв'язку. Ця ієрархічна структура повинна зберегти працездатність при відмови окремих супутників, при локальних навантаженнях і виведення з ладу частини засобів зв'язку з наземною інфраструктурою.
Передача сигналів ССП. На відміну від інших систем передачі, що працюють в діапазоні НВЧ, у супутникових системах радіосигнал долає значні відстані, що визначає ряд особливостей, до яких відносять доплеровський зсув частоти, запізнення сигналу, порушення безперервності значень запізнення і зсуву доплерівського частоти.
Відомо, що відносне переміщення джерела сигналу частотою f зі швидкістю v p<< с вызывает доплеровский сдвиг ![]() , де з - швидкість поширення електромагнітних коливань; знак «+» відповідає зменшенню відстані між джерелом сигналу та приймачем сигналу, а «-» - збільшенню.
, де з - швидкість поширення електромагнітних коливань; знак «+» відповідає зменшенню відстані між джерелом сигналу та приймачем сигналу, а «-» - збільшенню.
При передачі модульованих коливань частота кожної спектральної складової змінюється 1 + (v p /c) раз, тобто. складові з вищою частотою отримують більшу зміну частоти, і з нижчою частотою - менше. Таким чином, ефект Доплера призводить до перенесення спектра сигналу на значення ∆f don і зміну масштабу спектра в 1 + + (v p /c) раз, тобто. для його деформації.
Для геостаціонарних супутників доплерівське зрушення незначне і не враховується. Для сильно витягнутих еліптичних орбіт (орбіт типу «Блискавка») максимальне значення доплерівського зсуву лінії вниз у смузі 4 ГГц становить 60 кГц, що призводить до необхідності компенсувати його, наприклад, за заздалегідь розрахованою програмою. Складніше компенсувати деформацію спектра. Для цього можуть бути застосовані пристрої або зі змінною керованою затримкою групового або НВЧ сигналу, що змінюється за програмою, або керуючі частотами групового перетворення каналоутворювальної апаратури систем передачі з частотним поділом каналів.
2. Багатостанційний доступ
Ретранслятори, що встановлюються на зв'язкових супутниках, як і в РРСП прямої видимості, являють собою багатоствольні приймальні пристрої. Число стволів у сучасних ССП може досягати 24 і більше. При цьому зазвичай використовується вся виділена смуга частот в даному діапазоні. При передачі сигналів різних ЗС з різних стволів зазвичай жодних проблем немає. Якщо ж передаються сигнали різних ЗС по одному стволу ретранслятора, таке використання стволів називається багатостанційним доступом (МД). Він дозволяє створити мережу зв'язку, в якій один ствол супутникового ретранслятора дає можливість одночасно організувати як магістральні одно-і багатоканальні системи передачі з центральною станцією, так і системи зв'язку типу "кожен з кожним". У супутникових системах на відміну багатоканальних наземних систем груповий сигнал утворюється земними станціями безпосередньо на вході ретранслятора, причому в діапазоні НВЧ.
Основні вимоги до системи МД такі: ефективне використання потужності ретранслятора та максимальне – смуги частот ретранслятора; допустимий рівень перехідних перешкод; гнучкість системи.
Щоб МД відповідав цим вимогам, необхідно знайти ансамбль ортогональних або близьких до ортогональних сигналів. Відомі три способи формування такого ансамблю, засновані на поділі сигналів за частотою, часом і формою. Відповідно до цих способів розрізняють такі види МД: з частотним поділом сигналів (МДЧР); з розподілом сигналів за часом (МДВР); з поділом сигналів формою (МДРФ). Знаходять застосування різновиду та комбінації цих способів.
Багатостанційний доступ із частотним поділом сигналів. При МДЧР кожен сигнал ЗС має певну ділянку загального групового НВЧ спектру частот. Усі вони передаються одночасно, а груповий сигнал, що проходить через ретранслятор супутника, утворюється з сигналів як окремих каналів (наприклад, тональної частоти), а й із груп каналів. При цьому можливе використання різних видів модуляції. Спектр групового сигналу з МДЧР наведено малюнку 3. Тут на кожній ЗС сигнал, утворений одним або групою каналів, рознесених по частоті, модулює свою несучу f H . При певних значеннях несучих на вході ретранслятора в межах смуги ствола ∆fp у діапазоні НВЧ утворюється груповий сигнал. Значення несучих частот і девіація частоти вибираються такими, щоб між спектрами сигналів залишалися захисні інтервали ∆f 3 зменшення взаємних перешкод між сигналами.
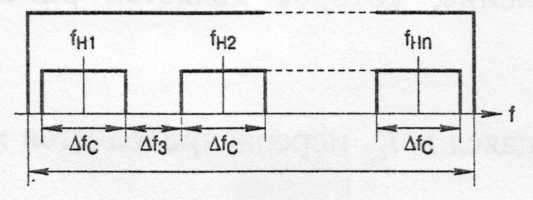
Малюнок 3. Спектр групового сигналу з МДЧР
Передача сигналів при МДЧР призводить до зниження загальної вихідної потужності ретранслятора, взаємного придушення сигналів, появу перехідних перешкод через нелінійність амплітудної характеристики ретранслятора і наявність в ретрансляторі елементів, що перетворюють амплітудну модуляцію в фазову.
Ефективність МДЧР істотно падає проти односигнальним режимом. Так, під час передачі через ретранслятор сигналів від 10 ЗС можна пропустити лише 10 каналів тональної частоти (КТЧ) кожної несучої, тобто. всього 100 КТЧ, а за наявності 55 ЗС на кожній несучій можна передати лише один КТЧ.
Переваги МДЧР полягає у простоті апаратури та її сумісності з більшою частиною експлуатованої апаратури канального перетворення.
Різновидом МДЧР є багатостанційний доступ типу «що несе на канал», що представляє комбінацію способів передачі сигналів, у якому враховується статистика багатоканального повідомлення у системах із незакріпленими каналами.
Оскільки активність КТЧ становить 25...30 % часу, протягом якого він зайнятий, то, виключаючи несучі коливання в паузах розмови, можна зменшити середньостатистичну завантаження ретранслятора сигналами ЗС або за тієї ж завантаженні збільшити число ЗС у системі. У системах з виключенням несучих можливе збільшення їх ефективності в 3 рази при використанні ЧС несучих, при використанні інших видів можна ще більше збільшити ефективність системи МД.
Система, в якій сигнал кожного КТЧ передається на окрему несучу, отримав назву несучу на канал. Ця система відрізняється тим, що виділення каналу та встановлення зв'язку між парою абонентів вимагає наявності службового каналу та системи управління зі спеціально виділеною для цієї мети управляючою ЗС.
Багатостанційний доступ із поділом сигналів у часі. Інтенсивний розвиток цифрових систем передачі спричинив створення систем з МДВР. У таких системах кожної ЗС для випромінювання сигналів виділяється певний періодично повторюваний інтервал часу, тривалість якого визначається трафіком станції. Інтервал часу, протягом якого всі станції мережі по одному разу випромінюють сигнал, називається кадром, а тривалість пакета імпульсів, що випромінюються однією станцією, називається субкадром. Інтервали часу випромінювання всіх ЗС повинні бути синхронізовані взаємно, щоб не перекривалися сигнали. Для цього частина пропускної здатності стовбура приділяється для передачі сигналів кадрової (циклової) синхронізації.
Найчастіше застосовується сигнал синхронізації як окремого спеціалізованого пакета - сигнал виділеної синхронізації. При цьому синхросигнали всіх ЗС передаються у кадрі на фіксованих часових позиціях окремо від інформаційних пакетів. Структура та тривалість кадрових синхросигналів постійні, тоді як розташування та тривалість інформаційних пакетів можуть змінюватися відповідно до трафіку ЗС.
При МДВР ретранслятор розраховується на потужність, близьку до максимальної, так як у кожний момент часу через нього проходить сигнал лише однієї ЗС і відсутні перехідні перешкоди, що є однією з основних причин зниження пропускної здатності системи.
На малюнку 4 показаний приклад кадру системи із МДВР. З малюнка випливає, що ефективність використання смуги пропускання ствола для МДВР визначається необхідністю введення певних захисних інтервалів часу t 3 гарантують відсутність перекриття сигналів при нестійкій роботі міжстанційної синхронізації, а також необхідності введення ряду додаткових сигналів, у тому числі сигналів синхронізації. Відповідно до цього ефективність системи з МДВР дорівнює
де - Тривалість сигналу кадрової синхронізації; - Тривалість сигналу субкадрової синхронізації; - Тривалість кадру; n- Число каналів системи. З цієї формули слід, що підвищення ефективності системи доцільно збільшити тривалість кадру, зменшити довжину і кількість захисних інтервалів, підвищувати точність синхронізації. Оскільки тривалість кадрів для мовного зв'язку визначається теоремою Котельникова-Найквіста і, отже, максимальною частотою сигналу (так, для КТЧ зазвичай застосовується = 125 мкс), то для збільшення необхідно ввести буферну пам'ять, в результаті чого збільшується затримка інформації, що передається. З метою зменшення ємності буферної пам'яті передачі інформації даної станції може бути надано кілька субкадрових інтервалів, рівно розташованих у кадрі. При цьому неминучі втрати у пропускній здатності через збільшення числа захисних інтервалів.
Багатостанційний доступ із поділом сигналів за формою. У системах з МДРФ зазвичай використовують шумоподібні сигнали (ШПС), їх називають також широкосмуговими, широко базовими або складовими. На відміну від звичайних сигналів, для яких база В = ≈ 1, де - ширина смуги сигналу, а - його тривалість, для ШПС В >> 1. Це перетворення рівносильне розширенню спектра nразів і відповідного збільшення бази сигналу.
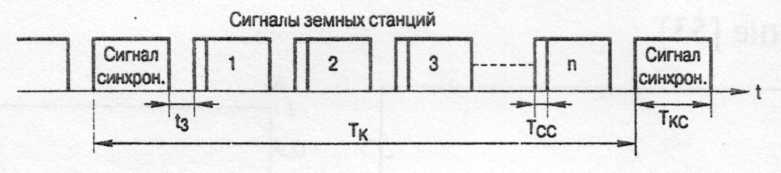
Малюнок 4. Структура кадрів системи з МДВР
При передачі супутниковим каналом ШПС переноситься в область НВЧ. Якщо ШПС різних каналів повністю або частково не перекриваються в часі та частоті, то на прийомі мають справу з поділом ШПС за часом і частотою відповідно. Якщо сигнали повністю або частково перекриваються і за часом і частотою, то сигнали розділені за формою. Отже, сигнали різних каналів мають бути ортогональними у найширшому сенсі. Цей випадок і становить найбільший інтерес.
Під час обробки прийнятого ШПС необхідно враховувати чергування різнополярних імпульсів, тобто. як би "згортати" сигнал. При цьому приймальний пристрій має бути узгоджений із структурою ШПС та синхронізований з ним. Звідси випливає, що ШПС, має іншу структуру (форму), буде сприйнятий даним приймальним пристроєм як перешкода. Якість передачі в такій системі визначається взаємними перешкодами між сигналами абонентів - шумами не ортогональності, які зростають у міру збільшення числа одночасно працюючих абонентів. Якщо абоненти рівноправні, якість зв'язку може бути поліпшено підвищенням потужності ШПС. Ця обставина призводить до необхідності збільшення бази ШПС та ускладнення обробки сигналів на приймальній стороні, що викликає ускладнення апаратури.
При встановленні зв'язку між абонентами в системі з ШПС необхідні пошук і автопідстроювання по несучій частоті сигналу, що приймається, а також пошук і підстроювання часу його приходу. У супутникових системах передачі (ССП) вплив сукупності сигналів інших абонентів на пристрій даного абонента проявляється як додаткова флуктуаційна перешкода.
У багатостанційному доступі на основі ШПС кількість абонентів не може бути більшою. Збільшення числа активних абонентів веде до збільшення бази сигналів. Реально вона становить кілька десятків.
Розвиток систем багатостанційного доступу . При встановленні на супутниках особливих антен у вигляді так званих фазованих решіток, що допускають швидку зміну орієнтації випромінювання, можна реалізувати просторовий багатостанційний доступ, який повинен поєднуватися з МДВР, можлива обробка сигналів на борту ШСЗ, під якою розуміється широкий клас перетворень сигналів, що ретранслюються, починаючи від комут. їх аж до повної демодуляції та поділу. Ідея багатостанційного доступу з комутацією сигналів полягає в тому, що на борту ШСЗ встановлюється крім ретрансляторів комутуючий пристрій, що забезпечує передачу отриманих сигналів ЗЗС тільки на ті станції, яким ці сигнали адресовані (на відміну від звичайних ретрансляторів, які передають сигнали на всю опромінену поверхню Землі) . Як приклад різного виду перетворень можна зазначити спосіб, у якому на супутниках методом МДЧР передається ряд несучих, промодулированных по фазі. Ці несучі демодулюються, об'єднуються в часі і модулюють несучу, що передається із супутника на ЗС, де вона демодулюється і сигнали поділяються за часом.
Можна передавати на супутник ШПС, «згортати» їх, об'єднувати та передавати на ЗС звичайними методами. При такому перетворенні сигналів на борту супутника підвищується пропускна здатність через перенесення запасів енергії на лінії вгору та виграш її на лінії вниз.
Принципи побудови систем супутникового телемовлення. Передача телевізійних сигналів супутниковими лініями зв'язку. Створення розгалуженої мережі центрального телевізійного (ТБ) мовлення стало можливим лише за допомогою зв'язкових ШСЗ. Побудову СТВ розглянемо організації ТБ у системі супутникового зв'язку «Орбіта-2», використовує ШСЗ типу «Блискавка» чи геостаціонарні ШСЗ типу «Горизонт».
У системі «Орбіта-2» прийом на ШСЗ здійснюється у діапазоні 6 ГГц, передача у напрямку Землі – у діапазоні 4 ГГц. Використовується ЧС з девіацією 15 МГц, сигнал звукового супроводу передається на частоті 7 МГц, що піднесе, з девіацією частоти 150 кГц. На частотах 7,5 і 8,2 МГц передаються сигнали звукового мовлення і зображення газетних смуг (ІГП). Сигнали ІДП передаються з метою забезпечення децентралізованого друкування центральних газет. Практично девіація несучої сигналом піднесе ІГП становить приблизно 1,5 МГц.
Функціональна схема активного ретранслятора ШСЗ типу «Блискавка» наведена малюнку 5. Ретранслятор працює в такий спосіб. Прийнятий антеною Ан сигнал із частотою надходить на розділовий фільтр РФ і далі перетворювач частоти ПЧ-1. На другий вхід ПЧ надходить сигнал від гетеродину. Потім перетворений сигнал з частотою посилюється підсилювачем проміжної частоти УПЧ-1 і надходить на другий перетворювач частоти ПЧ-2, що працює спільно з гетеродином передавача. На виході ПЧ-2 утворюється радіосигнал із частотою . Цей сигналпосилюється за потужністю підсилювачем РОЗУМ і через розділовий фільтр РФ та антену Ан передається у напрямку Землі.
Для стеження за ШСЗ у приймальні ЗС використовуються параболічні антени з діаметром дзеркала 12 м, встановлені на повноповоротному опорному пристрої. В цілому ЗС є досить складною і дорогою спорудою.
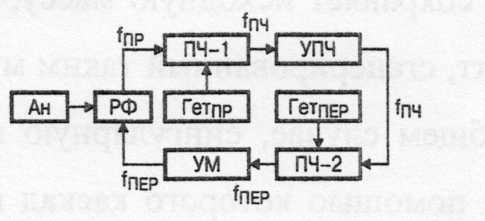
Малюнок 5. Структурна схема активного ретранслятора ШСЗ типу «Блискавка»
На цей час у Росії побудовано близько 90 приймальних станцій «Орбіти». Приймальна мережа системи «Орбіта-2» є непрямою розподільчою мережею, тобто. наземні станції приймають через ШСЗ ТВ сигнал і по наземних сполучних лініях передають на найближчі телецентри або потужні ретранслятори, які доводять їх до абонентів у метровому чи дециметровому діапазоні хвиль. Експлуатація системи «Орбіта-2» показала її ефективність лише у великих населених пунктах.
З метою підвищення економічної ефективності було введено в експлуатацію супутникову систему передачі «Екран», яка використовує ІСЗ, що знаходиться, на геостаціонарній орбіті (ДСО).
Для розширення зони обслуговування безпеки створення перешкод наземним службам було введено в експлуатацію супутникова система «Москва». Подача ТБ сигналів на мережу земних приймальних станцій здійснюється через геостаціонарний ШСЗ.
Створення сучасної багатопрограмної ТБ мережі неможливе на основі систем «Орбіта-2», «Екран», «Москва». Тому перспективою ТБ за допомогою ШСЗ є безпосереднє телевізійне мовлення (НТВ) при використанні найбільш вигідного економічного відношення діапазону частот 11,7 ... 12,5 ГГц. У цій смузі частот створюються багатопрограмні національні мережі СТВ. Нині у Росії для НТВ запускається на ДСО серія зв'язкових ШСЗ типу «ГАЛС».
3. Вимоги нормативних документів при побудові та застосуванні супутникових та радіорелейних систем передачі.
Навчальне питання викладено окремо у додатку до цього курсу лекцій.
Контрольні питання:
1. Назвіть основні засади побудови супутникових систем передачі.
2. Назвіть орбіти зв'язкових штучних супутників Землі (ІСЗ) та дайте їх порівняльний аналіз.
3. Сутність багатостанційного доступу. Класифікація методів багатостанційного доступу.
4. Назвіть основні елементи схеми передавальної земної станції супутникового телебачення та вкажіть їхнє призначення.
5. Назвіть основні елементи схеми активного ретранслятора ШСЗ та вкажіть їх призначення.
6. Назвіть основні елементи та їх призначення схеми прийому радіосигналів супутникового телебачення.
6.1. Поняття дистанційного зондування Землі
Під дистанційним зондуванням Землі (ДЗЗ) розуміють неконтактне вивчення Землі, її поверхні, близькоповерхневого простору та надр, окремих об'єктів, динамічних процесів та явищ шляхом реєстрації та аналізу їхнього власного чи відбитого електромагнітного випромінювання. Реєстрацію можна виконувати за допомогою технічних засобів, встановлених на аеро- та космічних літальних апаратах, а також на земній поверхні, наприклад при дослідженні динаміки ерозійних та зсувних процесів та ін.
Дистанційне зондування, інтенсивно розвиваючись, виділилося в самостійний напрямок використання знімків. Взаємозв'язок основних напрямів використання знімків та найменування напрямків можуть бути представлені схемою (рис. 34).
Мал. 34. Схема взаємозв'язку основних процесів отримання та обробки знімків
В даний час більшу частину даних дистанційного зондуванняЗемлі одержують із штучних супутників Землі (ІСЗ). Дані ДЗЗ – це аерокосмічні знімки, що подаються у цифровій формі у вигляді растрових зображень, тому проблематика обробки та інтерпретації даних ДЗЗ тісно пов'язана із цифровою обробкою зображень.
Дані космічних зйомок стали доступні широкому колу користувачів і активно застосовуються не тільки в наукових, а й у виробничих цілях. ДЗЗ є одним із основних джерел актуальних та оперативних даних для геоінформаційних систем (ГІС). Науково-технічні досягнення у галузі створення та розвитку космічних систем, технологій отримання, обробки та інтерпретації даних багаторазово розширили коло завдань, які вирішуються за допомогою ДЗЗ. Основні сфери застосування ДЗЗ з космосу – вивчення стану навколишнього середовища, землекористування, вивчення рослинних угруповань, оцінка врожаю сільськогосподарських культур, оцінка наслідків стихійних лих тощо.
6.2. Області застосування даних дистанційного зондування
Застосування космічних знімків може здійснюватися на вирішення п'яти завдань.
1. Використання знімка як найпростіша картка або, точніше, основа, на яку можна наносити дані з інших джерел без більш точних карт, що відображають сучасну обстановку.
2. Визначення просторових кордонів та структури об'єктів для визначення їх розмірів та вимірювання відповідних площ.
3. Інвентаризація просторових об'єктів певній території.
4. Оцінка стану території.
5. Кількісна оцінка деяких властивостей земної поверхні.
Дистанційне зондування є перспективним методом формування баз даних, просторове, спектральне та тимчасове вирішення яких буде достатнім для вирішення завдань раціонального використання природних ресурсів. Дистанційне зондування є ефективним методом інвентаризації природних ресурсів та моніторингу їхнього стану. Оскільки ДЗЗ дозволяє отримувати інформацію про будь-які області Землі, включаючи поверхню морів і океанів, сфери застосування цього методу дійсно безмежні. Основою для експлуатації природних ресурсів є аналіз інформації про землекористування та стан земних покривів. Крім збору такої інформації, дистанційне зондування використовують також для вивчення таких природних катастроф, як землетруси, повені, зсуви та осідання грунту.