Які глобальні навігаційні системи вам відомі. Доповідь на тему "глобальні навігаційні супутникові системи". Космічний сегмент систем ГЛОНАСС і gps
Під час сонячних спалахів.
Під час геомагнітних збурень.
Пояснити, що таке ГНСС.
Розповісти про розвиток засобів навігації: «від компаса до супутникових навігаційних систем (СНС)».
пояснити загальні принципироботи супутникової навігації(СН).
Описати діючі СНС-GPSі GLONASS, Їх складових (космічний і наземний сегменти) І областей застосування.
Розповісти, які СНС готуються до запуску або знаходяться в стадії розробки (GALLILEO, COMPASS).
Машина-машина являє собою автоматизовану обмін інформацією між пристроями, такими як машини, транспортні засоби чи контейнери один з одним або з центром управління, все частіше використовують Інтернет і різні мережі доступу, таких як мережа мобільного зв'язку. Один з додатків є віддалений моніторинг, управління і технічне обслуговування машин, обладнання та систем, які традиційно називають телеметрією.
Наприклад, в індустрії торгових автоматів автомати автоматично реєструються на центральному комп'ютері, коли вони мають потребу в повторному зберіганні. Контрольних відключень машинного оператора можна уникнути. Крім того, це допомагає уникнути простоїв. Пов'язана з цим раціоналізація бізнес-процесів і пов'язана з цим економія витрат мають великий ринковий потенціал для промисловості, а також для суспільства. Бортова діагностика - це діагностична система автомобіля. Будь-які виникають помилки відображаються в драйвері через контрольну лампу і постійно зберігаються у відповідному блоці управління.
Пояснити збої СНС:
Розповісти про фактори, що впливають на погіршення точності позиціонування.
ГНСС.
Супутникова навігація: поняття, система, дія.
Глобальна Навігаційна Супутникова Система (ГЛОНАСС) - радянська і російська, Розроблена на замовлення. Одна з двох функціонуючих на сьогодні систем глобальної супутникової навігації. ос нової системиповинні бути 24 супутники, що рухаються над поверхнеюв трьох орбітальних площинах з нахилом орбітальних площин 64,8 ° і висотою 19 100 км. Принцип вимірювання аналогічний американській системі навігації. В даний час розвитком проекту ГЛОНАСС займається(Роскосмос) і ВАТ «Російський»
Потім повідомлення про помилки можуть бути запитані пізніше майстерні фахівця через стандартизовані інтерфейси. Спочатку дані записувалися і оцінювалися по-різному відповідно до різними принципами різних виробників, іноді навіть від моделі до моделі. Термін «локалізація» підсумовує кілька методів визначення місця розташування віддалених об'єктів. Підставою зазвичай є вимірювання відстані, зроблене спостерігачем з використанням сигналів, які повертаються до передавача від об'єкта, який повинен бути розташований.
З  Скільки існує людство, стільки й вирішується питання про те, як визначити своє місце розташування на суші і на морі, в лісі або в місті. На сьогоднішній день відпала необхідність орієнтуватися, як стародавні мандрівники і мореплавці за зірками або компасу. Епоха відкриття радіохвиль істотно спростило завдання навігації і відкрило нові перспективи перед людством у багатьох сферах життя і діяльності, а з відкриттям можливості підкорення космічного простору відбувся величезний прорив в області визначення координат місця розташування об'єкта на Землі. штучні супутникиЗемлі стали опорними станціями для радіонавігації і на сьогоднішній день системи супутникової навігації стали доступні не тільки військовим або морякам, а й простим людям, приватним особам і компаніям, для яких навігація необхідна.
Скільки існує людство, стільки й вирішується питання про те, як визначити своє місце розташування на суші і на морі, в лісі або в місті. На сьогоднішній день відпала необхідність орієнтуватися, як стародавні мандрівники і мореплавці за зірками або компасу. Епоха відкриття радіохвиль істотно спростило завдання навігації і відкрило нові перспективи перед людством у багатьох сферах життя і діяльності, а з відкриттям можливості підкорення космічного простору відбувся величезний прорив в області визначення координат місця розташування об'єкта на Землі. штучні супутникиЗемлі стали опорними станціями для радіонавігації і на сьогоднішній день системи супутникової навігації стали доступні не тільки військовим або морякам, а й простим людям, приватним особам і компаніям, для яких навігація необхідна.
Зазвичай це відбувається через відображення. Використовуються лазерні, звукові сигнали, Радар. Місцезнаходження відрізняється від локалізації активних процедур і не слід плутати з ним. Національний національний супутник, який є національною супутниковою системою, являє собою американську супутникову систему. Він був побудований Міністерством оборони США для військових цілей в 1970-х роках і повністю функціонує з середини 1990-х років.
Є супутниковою навігаційною системою, керованою Міністерством оборони Російської Федерації. Паралельне, незалежний розвиток двох еквівалентних систем під час «холодної війни» було по військових причин. Є європейською супутниковою навігаційною системою, в основному для цивільного сектора.
Поняття: Супутникова система навігації
- комплексна електронно-технічна система, що складається із сукупності наземного і космічного устаткування, призначена для визначення місця розташування (географічних координат і висоти), а також параметрів руху (швидкості і напрямку руху і т. д.) для наземних, водних і повітряних об'єктів.
Є навігаційною системою Китайської Народної Республіки. Сузір'я супутників трьох геосинхронной супутників було спеціально розроблено для Японії, але інші азіатсько-тихоокеанські регіони також виграють. Супутникові навігаційні системивикористовуються для визначення положення з різною точністю. Як правило, мова йде про визначення вашої власної позиції на віртуальній карті. Наприклад, в смартфоні або автомобільної навігації.
Примітка. Глобальні супутникові навігаційні системи не є системами стеження. Це системи позиціонування. Система позиціонування потребуватиме не лише у визначенні місця розташування, а й у зворотному каналі до точки визначення місця розташування. Навігаційні системи не мають цього зворотного каналу.
система:
Основні елементи супутникової системи навігації:
орбітальне угруповання
, Що складається з декількох (від 2 до 30) супутників, випромінюючих спеціальні радіосигнали; Наземна система управління і контролю, що включає блоки вимірювання поточного положення супутників і передачі на них отриманої інформації для коригування інформації про орбітах;
Приймальне клієнтське обладнання
( «Супутникових навігаторів»), що використовується для визначення координат;
опціонально
:
інформаційна радіосистема для передачі користувачам поправок, що дозволяють значно підвищити точність визначення координат.
Різниця визначення місця розташування і розташування
З радістю терміни «розташування» і «позиціонування» об'єднуються разом або використовуються синонімом один для одного. Але є невелика, але тонка різниця. Пошук - це коли хтось хоче визначити місце розташування іншої людини або об'єкта. Для цього необхідно, щоб ця людина або об'єкт був оснащений приймачем і передавачем. Приймач визначає своє положення, і передавач передає це положення пошуковому особі. Необхідно, щоб повертається канал об'єкта, що підлягає пошуку, або людина була присутня.
Дія: Принцип роботи супутникових систем навігації заснований на вимірюванні відстані від антени на об'єкті (координати якого необхідно отримати) до супутників, положення яких відомо з великою точністю. Таблиця положень всіх супутників називається альманахом, яким повинен мати у своєму розпорядженні будь-якої супутниковий приймач до початку вимірювань. Зазвичай приймач зберігає альманах в пам'яті з часу останнього виключення і якщо він не застарів - миттєво використовує його. Кожен супутник передає в своєму сигналі весь альманах.
Тільки тоді може бути місце. Визначення положення не залежить від місця розташування. Чисте визначення місцезнаходження ще не є місцем, якщо відсутній зворотний канал. Тільки в тому випадку, якщо, наприклад, позиція може бути передана через мобільний телефон, можливе розміщення.
Він призначений головним чином для військових цілей. З прийнятим сигналомможна визначити більш точне місце розташування в перший раз. Це призвело до збільшення навігаційних систем для транспортних засобів. Це покращує визначення позиції. Кількість супутників становить 28 і охоплює всю поверхню Землі, покриваючи одержувані сигнали.
Таким чином, знаючи відстані до декількох супутників системи, за допомогою звичайних геометричних побудов, на основі альманаху, можна обчислити положення об'єкта в просторі. Метод вимірювання відстані від супутника до антени приймача заснований на визначеності швидкості поширення радіохвиль. Для здійснення можливості вимірювання часу поширення радіосигналу, кожен супутник навігаційної системи випромінює сигнали точного часу, в складі свого сигналу використовуючи точно синхронізовані з системним часом атомний годинник.
Однак використання обмежене здебільшого Азії та Тихого океану. Глобальна система все ще будується. Теоретично сигнали від трьох супутників необхідні для визначення точного положення і висоти приймача. А саме, відстані від супутників можуть бути визначені з часу передачі сигналів. Кожне з цих відстаней визначає сферу навколо відповідного супутника, на якому розташований приймач. Потім три сферичні поверхні перетинаються максимум в дві точки. Один з них розташований в декількох тисячах кілометрів від земної поверхні і тому може бути відкинутий; інший представляє собою шукане положення приймача, тому необхідний сигнал четвертого супутника, за допомогою якого потім точний час в приймальнику і, отже, тривалість сигналу, тому в кінцевому рахунку відстань може бути визначено.
При роботі супутникового приймача його годинник синхронізуються з системним часом і при подальшому прийомі сигналів обчислюється затримка між часом випромінювання, що містяться в самому сигналі, і часом прийому сигналу. Маючи в своєму розпорядженні цією інформацією, навігаційний приймач обчислює координати антени. Для отримання інформації про швидкість більшість навігаційних приймачів використовують ефект Доплера. Додатково накопичуючи і обробляючи ці дані за певний проміжок часу, стає можливим обчислити такі параметри руху, як швидкість (поточну, максимальну, середню), пройдений шлях і т. Д. У реальності робота системи відбувається значно складніше.
Нижче перераховані деякі проблеми, що вимагають спеціальних технічних прийомів щодо їх вирішення:
Відсутність атомного годинника в більшості навігаційних приймачів. Цей недолік зазвичай усувається вимогою отримання інформації не менше ніж з трьох (2-мірна навігація при відомій висоті) або чотирьох (3-мірна навігація) супутників; (При наявності сигналу хоча б з одного супутника можна визначити поточний час з хорошою точністю). Неоднорідність гравітаційного поля Землі, що впливає на орбіти супутників; Неоднорідність атмосфери, через яку швидкість і напрямок поширення радіохвиль може змінюватися в певних межах; Відображення сигналів від наземних об'єктів, що особливо помітно в місті; Неможливість розмістити на супутниках передавачі великої потужності, через що прийом їх сигналів можливий тільки в прямої видимості на відкритому повітрі.
В даний час розробляються інші сучасні системи. побудованих або запланованих європейцями, китайцями та індусами. Наступна французька марка показує орбіти і супутник системи Галілео. Перші два експлуатаційних супутника були включені.
Географічні координати, а також висота над певним опорним еліпсоїдом також можуть бути обчислені безпосередньо з просторових координат. Крім того, може бути отримана між точками вимірювання, двовимірні координати точок вимірювання на опорній поверхні, або також відстані та напрямки.
Історія і перспективи розвитку.
Історія розвитку супутникових навігаційних систем налічує вже понад 40 років. Початком розвитку вітчизняної супутникової радіонавігаційної системи (СРНС), як найчастіше вважають, запуск 4 жовтня 1957 року у Радянському Союзі першого в історії людства Штучного Супутника Землі (ШСЗ). Вперше висловлювання про необхідність створення такої системи, що задовольняє потреби багатьох відомств, прозвучали на науково-технічномураді в 1946 р в виступах фахівців Ленінградського Науково-дослідний радіотехнічний інститут. В середині 70-х в СРСР була створена супутникова навігаційна система "Цикада", а в 60х в США - система «Транзит», яка в подальшому зазнала безліч змін і технологічних удосконалень. Ці системи розроблялися на замовлення Міністерства Оборони країн і були спеціалізовані для оперативної глобальної навігації наземних рухомих об'єктів, але лише в грудні 1976 року була прийнята Постанова ЦК КПРС і Ради Міністрів СРСР «Про розгортання Єдиної космічної навігаційної системи». У наявних тоді систем супутникової навігації, споживачів не влаштовували точність результатів і час, необхідний для визначення координат - потрібне створення систем наступного покоління. В результаті в Радянському союзі на початку 80-х років минулого століття і була винайдена Система супутникової навігації. Народились системи супутникової навігації отримали назву GPS - в США, і ГЛОНАСС - в СРСР. В результаті перший американський супутникбув запущений в лютому 1978 року, а перший радянський пізніше - 12 жовтень 1982 го. 24 вересня 1993 року ГЛОНАСС була офіційно прийнята в експлуатацію. У 1995 році її супутникова угруповання склала 24 апарати. Згодом, через недостатнє фінансування, число працюючих супутників скоротилося. У серпні 2001 року була прийнята федеральна цільова програма «Глобальна навігаційна система», згідно з якою повне покриття території Росії планувалося вже? на початку 2008 року, а глобальних масштабів система досягла б до початку 2010 року. Для вирішення даного завдання планувалося протягом 2007, 2008 і 2009 років провести шість запусків ракетоносіїв, і вивести на орбіту 18 супутників - таким чином, до кінця 2009 року угруповання знову повинна налічувати 24 апарату. При цьому точність визначення місця розташування користувачів системи досягне 1-5 м, як у GPS. За даними ЦНДІ машинобудування, станом на сьогодні у складі орбітального угрупуваннясистеми ГЛОНАСС налічується 19 космічних апаратів. 14 з них використовуються за цільовим призначенням, 3 - на етапі введення в систему (вони були запущені 25.09.2008), 1 - тимчасово виведений на техобслуговування, 1 - на етапі виведення з системи. За прогнозами, до кінця 2008 року з системи будуть виведені ще три старих апарату.
Але також використовуються все більше приймачів, які можуть одночасно приймати та обробляти супутникові сигнали від декількох навігаційних систем, що підвищує точність і надійність визначення координат. Дані корекції надаються в університетській мережі, а також загальнодоступні через Інтернет і можуть використовуватися безпосередньо з професійними одержувачами. Для недорогих приймачів з вихідним виходом даних можна використовувати безкоштовне програмне забезпеченнядля застосування даних корекції.
Фактичне визначення місця розташування супутниковою навігаційною системою засновано на вимірі часу проходження радіосигналів, що передаються супутниками. На основі виміряних часових різниць між супутником і приймачем і відомою швидкістю поширення радіохвиль можна визначити відстані. Тому попередньою умовою є те, що годинник відправника і одержувача синхронізуються і працюють точно так же.
Довготривалу програму розвитку космічної навігаційної системи реалізовується за такими укрупненими етапами:
Етап 1
(До 2003 року). Підтримка КНС ГЛОНАСС на мінімально д  опустімом рівні запусками КА «Глонасс» (рис.), модернізація контуру інформаційного обміну наземного комплексу управління, розширене оснащення споживачів апаратурою, що працює за сигналами двох систем: ГЛОНАСС і GPS. Розробка і створення КА «Глонасс-М».
опустімом рівні запусками КА «Глонасс» (рис.), модернізація контуру інформаційного обміну наземного комплексу управління, розширене оснащення споживачів апаратурою, що працює за сигналами двох систем: ГЛОНАСС і GPS. Розробка і створення КА «Глонасс-М».
Приймач обчислює своє місце розташування в тривимірному просторі, Обчислюючи перетин трьох сферичних оболонок. У центрі кожної сфери знаходиться один із спостережуваних супутників, радіус якого визначається виміряним відстанню до приймача. Для визначення розташування повинно бути прийнято дебетование щонайменше трьох супутників. Щоб додатково виправити помилку синхронізації при вимірюванні часу проходження, необхідний четвертий супутник.
Помилки у вимірі відстаней, які в кінцевому підсумку призводять до помилкового визначення місцеположення, в основному, через вплив атмосфери, поширення багатопроменевого поширення або несприятливого сузір'я видимого в даний момент супутника. Передбачається, що локальні помилки впливають на опорний приймач і мобільний приймач, що використовуються для навігації тим же або аналогічним чином. За відхилення між виміряним і відомої реальної позицією опорної станції, фактичний час працює можна точно визначити і передати відмінності на ровері.
Е  тап 2
(До 2005 р.) Розгортання робочої орбітального угрупування до 18 одиниць на базі КА "Глонасс-М» (рис.) Масою 1415 кг. і терміном активного існування 7 років, що значно більше, ніж у супутників попередньої серії. Перехід в новий частотний діапазон навігаційного сигналу. Відпрацювання технології ефемеридних-часового забезпечення з використанням межспутнікових вимірювань. Розширення номенклатури та кількості споживачів, які працюють за сигналами КНС ГЛОНАСС і GPS. Розробка і створення маломассогабарітного КА «Глонасс-К».
тап 2
(До 2005 р.) Розгортання робочої орбітального угрупування до 18 одиниць на базі КА "Глонасс-М» (рис.) Масою 1415 кг. і терміном активного існування 7 років, що значно більше, ніж у супутників попередньої серії. Перехід в новий частотний діапазон навігаційного сигналу. Відпрацювання технології ефемеридних-часового забезпечення з використанням межспутнікових вимірювань. Розширення номенклатури та кількості споживачів, які працюють за сигналами КНС ГЛОНАСС і GPS. Розробка і створення маломассогабарітного КА «Глонасс-К».
Використання з недорогим приймачем і безкоштовним програмним забезпеченням
Перед від'їздом меню необхідно зберегти в цій точці. Якщо змінена прошивка викликає проблеми, початкова версія може бути відновлена аналогічним чином. Він включає в себе кілька інструментів для перетворення, візуалізації і розрахунку рішень розташування в режимі реального часу. Можлива подальша обробка записаних даних.
Крім адаптованих для інтерфейсу смартфона інтерфейсів існують практично ідентичні налаштування. Для тестування додаток дуже корисно, тому що не потрібно великої ноутбук, і настройки можуть бути швидко змінені. «Варіанти вирішення» залишаються незмінними.
етап 3
(До 2010р.). Розгортання штатної орбітального угрупування на базі маломассогабарітного, більш досконалого, негерметичного супутники «Глонасс-К» (рис. Немає тому що тільки розробляється) зі значно більшим терміном активного існування до 10 років, меншою масою, близько 700 кг, що в два рази менше, ніж у «Глонасс-М». Розширення використання межспутниковой радіолінії для вирішення завдань автономного ефемеридних-часового забезпечення, оперативного управління і контролю КА, забезпечення цілісності. Створення наземної мережі станцій моніторингу КНС ГЛОНАСС і функціональних доповнень. Оснащення парку споживачів НАП, працюючої за сигналами ГЛОНАСС, GPS, Galileo.
Навігаційні супутники цієї серії будуть виводитися на орбіту або поодинокими запусками ракетою-носієм «Союз-2» з розгінним блоком «Фрегат», або по шість апаратів в одному пакеті - ракетою-носієм «Протон» з розгінним блоком «Бриз-М». Крім того, їх виведення на орбіту можливо за допомогою індійського носія GSLV. Так, в 2004 р в Москві було підписано угоду з Індією про запуск двох навігаційних супутників в 2006-2008 рр. Апарати «Глонасс-К» створюються на базі більш прогресивної негерметичной платформи, що, за словами фахівців, висуває підвищені вимоги до апаратури і елементної бази, яка має працювати в умовах відкритого космосу. Можливо, якісь з використовуваних елементів будуть зарубіжними, але, оскільки навігаційна система російська, вона повинна в основному працювати на наших елементах, на наших приладах. На сьогоднішній день розробляється технологічна можливість установки навігаційного модуля ГЛОНАСС в мобільні телефони. Телефони, які мають GPS-навігатори, вже існують і широко використовуються у всьому світі, в тому числі і в Росії. На ринку навігаційної апаратури вже існує цілий ряд приймачів GPS / ГЛОНАСС - навігації, вони виробляються спеціально для Росії і мають саме різне призначення.
Вихід рішення розташування налаштовується через вкладку «Виходи даних», а дані бази і ровера - через вкладку «Записи даних». Можливість завантаження двох рішень ясно показує вплив даних корекції. Він не призначений для використання в комерційних цілях або цілях безпеки.
Університет Ашаффенбурга не несе відповідальності за своєчасність, доступність, правильність і повноту наданих даних. Університет прикладних наук Ашаффенбург прямо залишає за собою право змінювати пропозицію повністю або частково без окремого оголошення, доповнювати, видаляти або зупиняти публікацію тимчасово або постійно. Він не несе відповідальності за будь-які збитки, завдані або понесений користувачем, будь то матеріальний або нематеріальний, якщо тільки вони не є результатом наміри або грубої недбалості.
Експерти вважають, що головні завдання в нинішній період відновлення і розвитку ГЛОНАСС це:
Підвищити надійність і збільшити терміни сталого функціонування космічних апаратів «Глонасс» до 20 років;
Розвивати орбітальне угруповання до 6 площин з 48 супутниками з метою забезпечення високоточного позиціонування в умовах закритої місцевості (така програма вже прийнята США);
Це не застосовується в разі травми життя, тіла і здоров'я. Дані доступу і додаткову інформацію про Кастере можна знайти за наступним посиланням. Система, головний центр управління якої працює в Колорадо, доступна для всіх, вона безкоштовна і доступна в будь-якій точці світу.
Сигнали, які тепер здаються нам природним законом, більш схильні до маніпуляцій, ніж можна було б подумати. У будь-якому випадку, це говорить про деяких випадках, що сталися в останні місяці на Чорному морі. Навігаційний пристрій показало капітану 32-кілометровий міжнародний аеропорт Геленджика - безумовно правильну адресу. Капітан був не самотній з його проблемами навігації: ще 20 кораблів постраждали від інциденту.
Забезпечити радіоелектронну безпеку і незалежність системи;
Розглянути питання про доцільність виключення з системи «пасажирів» систему порятунку «Коспас», датчики визначення місця розташування ядерних вибухів, системи між супутникового зв'язку, Які тільки займають місце корисного навантаження.
А головне - залучити до роботи справжніх фахівців, які здатні доповісти всю правду про ГЛОНАСС. ГЛОНАСС є пріоритетною з усіх космічних програм, тому що без неї через кілька років Росія залишиться беззахисною. Без ГЛОНАСС асиметрична відповідь на американську ПРО і інші потенційні загрози в принципі неможливий. Тому президент так наполегливо вимагає в максимально короткі терміни відродити ГЛОНАСС.
Принцип роботи.
Супутники системи ГЛОНАСС безперервно випромінюють навігаційні сигнали двох типів: навігаційний сигнал стандартної точності (СТ) в діапазоні L1 (1,6 ГГц) і навігаційний сигнал високої точності (ВТ) в діапазонах L1 і L2 (1,2 ГГц). Інформація, яку надає навігаційним сигналом СТ, доступна всім споживачам на постійній і глобальній основі і забезпечує, при використанні приймачів ГЛОНАСС, можливість визначення:
* Горизонтальних координат з точністю 50-70 м (ймовірність 99,7%);
* Вертикальних координат з точністю 70 м (ймовірність 99,7%);
* Складових вектора швидкості з точністю 15 см / с (ймовірність 99,7%)
* Точного часу з точністю 0,7 мкс (вірогідність 99,7%).
Ці точності можна значно поліпшити, якщо використовувати диференційний метод навігації і / або додаткові спеціальні методи вимірювань.
Сигнал ВТ призначений, в основному, для споживачів Міністерства оборони Росії, і його несанкціоноване використання не рекомендується. Питання про надання сигналу ВТ цивільним споживачам знаходиться в стадії розгляду.
Для визначення просторових координат і точного часу потрібно прийняти і обробити навігаційні сигнали щонайменше від 4-х супутників ГЛОНАСС. При прийомі навігаційних радіосигналів ГЛОНАСС приймач, використовуючи відомі радіотехнічні методи, вимірює дальності до видимих супутників і вимірює швидкості їх руху.
Одночасно з проведенням вимірів в приймачі виконується автоматична обробка містяться в кожному навігаційному радіосигналі міток часу і цифрової інформації. цифрова інформаціяописує становище даного супутника в просторі і часі (ефемериди) щодо єдиної для системи шкали часу і в геоцентричної пов'язаної декартовій системі координат. Крім того, цифрова інформація описує положення інших супутників системи (альманах) у вигляді кеплерівських елементів їх орбіт і містить деякі інші параметри. Результати вимірювань і прийнята цифрова інформація є вихідними даними для вирішення навігаційного завдання по визначенню координат і параметрів руху. Навігаційна завдання вирішується автоматично в обчислювальному пристрої приймача, при цьому використовується відомий метод найменших квадратів. В результаті рішення визначаються три координати місця розташування споживача, швидкість його руху і здійснюється прив'язка шкали часу споживача до високоточної шкалою Універсального координованого часу (UTC).
ГЛОНАСС сьогодні.
У числі діючих космічних апаратів (КА) в даний час знаходиться одинадцять супутників «ГЛОНАСС-М», (один запущений в 2003 році, два - в 2005, три - в 2006), що мають гарантійний термін активного існування 7 років. Ці супутники випромінюють, на відміну від апаратів попереднього покоління, вже по два сигнали для цивільних споживачів, що дозволяє істотно підвищити точність визначення місця знаходження.
Відповідно до доручення Президента Російської Федерації мінімальна угруповання з 18 супутників повинна бути розгорнута в 2007 році. Повна угруповання в складі 24-х супутників відповідно до федеральної цільової програми «Глобальна навігаційна система» має бути розгорнута в 2010 році.
Супутники «ГЛОНАСС-М» в складі орбітального угрупування будуть знаходитися, як мінімум, до 2015 року. Льотні випробування негерметичних супутників нового покоління "ГЛОНАСС-К» з поліпшеними характеристиками (збільшеним до 10 років гарантійним терміном і третьої частотою L-діапазону для цивільних споживачів) повинні початися в 2009 році. Цей супутник буде вдвічі легший за свого попередника (приблизно 700 кг проти 1415 кг у «Глонасс-М»)
Надалі, після розгортання орбітального угрупування з 24-х КА, для її підтримки потрібно робити по одному груповому пуску в рік двох КА «ГЛОНАСС-К» на носії «Союз», що істотно знизить експлуатаційні витрати.
29 листопада 2006 року міністр оборони Сергій Іванов в ході візиту в РІРВ оголосив про те, що система ГЛОНАСС найближчим часом буде доступна і для цивільного використання.
18 травня 2007 року Президент РФ Володимир Путін підписав указ, згідно з яким доступ до російської навігаційної системи ГЛОНАСС буде надаватися безкоштовно і без обмежень як російським, так і іноземним споживачам.
Супутники ГЛОНАСС будуть запускати з космодрому Плесецьк.
МОСКВА, 9 квітня - РІА Новини. Запуск навігаційних супутників ГЛОНАСС в майбутньому буде здійснюватися не з Байконура, а з космодрому Плесецьк на ракетах-носіях Союз-2, повідомив заступник командувача Космічними військами РФ Олександр Квасніков. «Планується поступове переведення запусків космічних апаратів російської глобальної навігаційної системи ГЛОНАСС з Байконура на космодром Плесецьк. Ці старти планується здійснювати на модернізованих ракетах-носіях Союз-2 », - сказав Квасніков в понеділок, виступаючи з доповіддю на міжнародному форумі з супутникової навігації.
За його словами, переклад запусків з Байконура на Плесецьк забезпечить незалежність Росії за висновками на орбіту власних космічних апаратів.
Як зазначив заступник командувача Космічними військами, сфера застосування супутникових навігаторів ГЛОНАСС в військах простягається від забезпечення окремого військовослужбовця інформацією про його координатах до забезпечення цілих військових підрозділів навігаційною інформацією.
«З введенням в дію супутників системи ГЛОНАСС на борт ракети-носія встановлюється компактний блок, що забезпечує високоточні безперервні траєкторні вимірювання в ході польоту ракети. Раніше застосовувався спосіб, що вимагає залучення великої кількості людей і засобів, заснований на забезпеченні контролю польоту ракети наземними пунктами траєкторних вимірювань », - сказав Квасніков.
За його словами, в даний час в Космічних військах РФ йдуть випробування наземної і переносної апаратури навігаційної системи ГЛОНАСС.
«Її застосування дозволить використовувати приймачі ГЛОНАСС в будь-яких погодних умовах, забезпечуючи високоточну прив'язку по координатах і часу, особливо на сильно пересіченій і гірській місцевості», - зазначив заступник командувача.
Порівняння ГЛОНАСС і GPS.

Розглянемо деякі особливості основних систем супутникової навігації (NAVSTAR і ГЛОНАСС): Обидві системи мають подвійне призначення - військове і цивільне, тому випромінюють два види сигналів: один зі зниженою точністю визначення координат (~ 100 м) для цивільного застосування та іншої високої точності (~ 10 -15 м і точніше) для військового застосування. Супутники NAVSTAR розташовуються в шести площинах на висоті приблизно 20 180 км. Супутники ГЛОНАСС (шифр «Ураган») знаходяться в трьох площинах на висоті приблизно 19 100 км. Hомінальное кількість супутників в обох системах - 24. Угруповання NAVSTAR повністю укомплектована в квітні 1994-го і з тих пір підтримується, угруповання ГЛОНАСС була повністю розгорнута в грудні 1995-го, але з тих пір значно деградувала. На даний момент йде її активне відновлення. Обидві системи використовують сигнали на основі т.зв. «Псевдошумових послідовностей», застосування яких надає їм високу перешкодозахищеність і надійність при невисокій потужності випромінювання передавачів. Відповідно до призначення, в кожній системі є дві базові частоти - L1 (стандартної точності) і L2 (високої точності). Для NAVSTAR L1 = 1575,42 МГц і L2 = 1227,6 МГц. У ГЛОHАСС використовується частотне розділення сигналів, т. Е. Кожен супутник працює на своїй частоті і, відповідно, L1 знаходиться в межах від 1602,56 до 1615,5 МГц і L2 від 1246,43 до 1256,53. Сигнал в L1 доступний всім користувачам, сигнал в L2 - тільки військовим (тобто, не може бути розшифрований без спеціального секретного ключа). Кожен супутник системи, крім основної інформації, передає також допоміжну, необхідну для безперервної роботи приймального обладнання. У цю категорію входить повний альманах всієї супутникового угруповання, що передається послідовно протягом декількох хвилин. Таким чином, старт приймального пристрою може бути досить швидким, якщо він містить актуальний альманах (близько 1-ї хвилини) - це називається «теплий старт», але може зайняти і до 15-ти хвилин, якщо приймач змушений отримувати повний альманах - т. н. «Холодний старт». Необхідність в «холодному старті» виникає зазвичай при першому включенні приймача, або якщо він довго не використовувався.диференціальне вимір
Окремі моделі супутникових приймачів дозволяють виробляти т. Н. «Диференціальне вимір» відстаней між двома точками з великою точністю (сантиметри). Для цього вимірюється положення навігатора в двох точках з невеликим проміжком часу. При цьому, хоча кожне таке вимір має точність близько 10-15 метрів без наземної системи коригування та 10-50 см з такою системою, вимірювання відстаней має похибка набагато меншу, так як фактори, що заважають вимірюванню (похибка орбіт супутників, неоднорідність атмосфери і т. д.) в цьому випадку взаємно віднімаються. Крім того, є кілька систем, які посилають уточнюючу інформацію ( «диференціальну поправку до координат»), що дозволяє підвищити точність вимірювання координат приймача до десяти сантиметрів. Диференціальна поправка заснована на геостаціонарних об'єктах (супутниках, наземних базових станціях), зазвичай є платною (розшифровка сигналу можлива тільки одним певним приймачем після оплати «підписки на послугу»). В даний час (2006-й рік) існує безкоштовна європейська система EGNOS (European Geostationary Navigation Overlay Services), заснована на двох геостаціонарних супутниках, дає високу точність (до 30 см), але працює з перебоями і ненадійно. У Північній Америці її аналогом є система WAAS.
Недостакі GPS-системи.
Незважаючи на всі переваги, у GPS-систем є і недоліки. Наприклад, GPS- приймач може бути відключений в будь-який момент, скажімо, з міркувань безпеки США. Крім того, впровадження GPS- технології має на увазі наявність докладних електронних карт c масштабом до 100 м, які є у вільному продажу не в кожній країні. Не можна не згадати ту обставину, що при обчисленні координат супутникова система допускає похибки. Природа цих помилок різна. Основними джерелами помилок, що впливають на точність навігаційних обчислень в GPS-системи, зокрема, є:
Похибки, обумовлені режимом селективного доступу (Selective availability, S / A). Використовуючи даний режим, Міністерство Оборони США навмисно знижує точність визначення місцезнаходження для цивільних осіб. У режимі S / A формуються помилки штучного походження, що вносяться в сигнал на борту GPS-супутників з метою огрубіння навігаційних вимірювань. Такими помилками є невірні дані про орбіти супутника і спотворення показань його годин за рахунок внесення додаткового псевдослучайного сигналу. Величина середньоквадратичного відхилення через вплив цього фактора становить, приблизно, 30 м.
Похибки, пов'язані з поширенням радіохвиль в іоносфері. Затримки поширення сигналів при їх проходженні через верхні шари атмосфери призводять до помилок близько 20-30 м днем і 3-6 м вночі. Незважаючи на те, що навігаційне повідомлення, передане з борта GPS- супутника, містить параметри моделі іоносфери, компенсація фактичної затримки, в кращому випадку, становить 50%.
Похибки, пов'язані з поширенням радіохвиль в тропосфері. Виникають при проходженні радіохвиль через нижні шари атмосфери. Значення похибок цього виду при використанні сигналів з З / А- кодом не перевищують 30 м.
Ефемеридна похибка. Помилки обумовлені розбіжністю між фактичним становищем GPS-супутника і його розрахунковим становищем, яке встановлюється за даними навігаційного сигналу, що передається з борту супутника. Значення похибки зазвичай не боее 3м.
Похибка догляду шкали часу супутника викликана розбіжністю шкал часу різних супутників. Усувається за допомогою наземних станцій спостереження або за рахунок компенсації догляду шкали часу в диференціальному режимі визначення місця розташування.
Похибка визначення відстані до супутника є статистичним показником. Він обчислюється для конкретного супутника і в указаний час. Помилка не коррелированность з іншими видами похибок. Її величина зазвичай не перевищує 10 м.
НЕДОЛІКИ СИСТЕМИ ГЛОНАСС:
Необхідність зсуву діапазону частот вправо, так як в даний час ГЛОНАСС заважає роботі як рухомого супутникового зв'язку, так і радіоастрономії
При зміні ефемерид супутників, похибки координат в звичайному режимі збільшуються на 25-30м, а в диференціальному режимі - перевищують 10 м;
При корекції набігла секунди виконуються розриви сигналу ГЛОНАСС. Це призводить до великих погрішностей визначення координат місця споживача, що неприпустимо для цивільної авіації;
Складність перерахунку даних систем ГЛОНАСС і GPS через відсутність офіційно опублікованої матриці переходу між використовуваними системами координат.
Європейським союзом розробляється система супутниковоїнавігації Galileo. Китай також розробляє власнунавігаційну систему «Бейдоу», до кінця 2008 року вона буде покривати територію Китаю і більшості суміжних азіатських країн.
Galileo- система супутниковоїнавігації, Що розробляється Європейським союзом. Єдина концепція була прийнята в 1999 році, а початковий план розвитку був схвалений в 2003 році і передбачав запуск системи в 2008-му.
Однак він був зірваний через розбіжності між урядами країн ЄС і небажання приватних компаній інвестувати в Galileo. Консорціум приватних компаній складався з EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat і німецької групи, що включає Deutsche Telekom і German Aerospace Centre.
У травні 2007 року консорціум вийшов з проекту, і керівництво Galileo взяла на себе Єврокомісія. Зараз з 30 запланованих супутників на орбіті знаходиться тільки один, другий планується вивести на орбіту 27 квітня 2008 року.
На даний момент ЄС витратив на реалізацію проекту близько 1 млрд євро
На відміну від американської GPS і російської ГЛОНАСС, система Галілео не контролюється ні державними, ні військовими установами. Розробку здійснює ЄКА. Загальні витрати на створення системи оцінюються в 3,8 млрд. Євро. Перший супутник системи Галілео був доставлений на космодром Байконур 30 листопада 2005 року. 28 грудня 2005 року в 8:19 за допомогою ракети-носія «Союз-ФГ» космічний апарат GIOVE-A (Galileo In-Orbit Validation Element) був виведений на розрахункову орбіту висотою понад 23000 км з нахилом 56 ° Маса апарату 700 кг, габаритні розміри: довжина - 1,2 м, діаметр - 1,1 м. Термін активного існування складає 12 років. «ЄКА» Європейське космічне агентство (European Space Agency) - міжнародна організація, створена в 1975 році з метою об'єднання зусиль з освоєння космосу на благо європейців Галілео.
Вплив іоносфери на характеристики трансіоносферних радіосигналів
Електромагнітні хвилі, що поширюються через іоносферу, відчувають найрізноманітніші обурення. Основною характеристикою іоносфери, що визначає зміна параметрів радіохвилі, є інтегральне (повне) електронне змістI (t ) Або його похідні (за часом і простором)I ´ t (t ), I ' x (t ) і I ' y (t ) Уздовж шляху поширення.
Зміни ПЕС можна умовно розділити на регулярні та нерегулярні. Регулярні зміни (сезонні, добові), по крайней мере, для магнітоспокойной среднеширотной іоносфери, описуються моделями, що дають відносні точності прогнозу ПЕС до 50 - 80%. Нерегулярні зміни (варіації) пов'язані з іоносферними неоднородностями різної природи, спектр яких носить статечної характер.
В результаті проведених останнім часом досліджень стало ясно, що обурення іоносфери під час магнітних бур позначаються на деградації сигналів і збої системи GPSне тільки на екваторі і в полярній зоні, але навіть на середніх широтах. Однак питання про причини і конкретні механізми цього впливу залишається в значній мірі відкритим.
Основним завданням майбутніх досліджень є вивчення фізичних механізмів багатомасштабних варіацій повного електронного вмісту в іоносфері під час геомагнітних збурень навколоземного космічного простору, що супроводжуються деградацією сигналів і збоями супутникових радіотехнічних систем. Ці дослідження повинні носити комплексний характер з максимальним залученням ряду незалежних експериментальних засобів моніторингу іоносфери (цифрові іонозонди, радари некогерентного розсіяння, ЛЧМ-іонозонди і т.д.).
точність GPS
Кожен повний набір даних включає іоносферну модель, яка використовується в приймачі для апроксимації затримки фази сигналу при його проходженні через іоносферу при будь-якому розташуванні супутників і в будь-який момент часу. Методи вимірювання дальності до супутника За допомогою псевдовипадкового коду. Псевдодальностей - відстань між антеною приймача і супутником виміряний за допомогою псевдовипадкового коду. Як говорилося раніше, ці відстані необхідні для розрахунку координат. Процедура визначення псевдо, може бути описана наступним чином.
Уявімо, що годинник на супутнику і приймачі повністю синхронізовані один з одним. Коли код PRN передається від супутника, приймач відтворює точну копію того ж коду. Після деякий час, код переданий супутником буде прийнятий приймачем. Порівнюючи переданий код і його точну копію, приймач може обчислити час потрібне для того щоб код досяг приймача. Множення часу подорожі на швидкістю світла дає нам дальність між супутником і приймачем. Вимірювання відстані за кодом На жаль, припущення, що приймач і супутникові годинник повністю синхронізовані, не зовсім вірний. Цей метод обчислення дальності вимагав би дуже точної синхронізації годин супутника і приймача. На супутники GPS стоять дуже точні атомні годинники, дуже дорого забезпечити таким годинником приймач, так як їх ціна може досягати 20 000 $.
Проблему синхронізації годин вирішують, розглядаючи помилку годин приймача як додаткове невідоме в навігаційних рівняннях.
Відстані між супутником і приймачем - сума загальної кількості повних циклів плюс дробовий цикл між приймачем і супутник, помножений на довжину хвилі несучої. Дальність, визначена за допомогою фази несучої, має набагато більшу точність ніж дальність, отримана за допомогою коду.
Є, однак, одна проблема. Несуча це синусоїдальна хвиля, що означає, що всі цикли виглядають однаково. Тому, приймач GPS не може відрізнити один цикл від іншого. Іншими словами, приймач, відразу при включенні, не може визначити загальну кількість повних циклів між супутником і приймачем. Він може визначити тільки дробову частину циклу (з точність не менше 2 мм), в той час як повне число циклів залишається невідомим, чи неоднозначним.
На щастя, приймач може відслідковувати зміну фази, будучи включеним. Це означає, що початкова невизначеність вирішується з плином часом. Визначення повного числа циклів несучої (довжин хвиль) між антеною та супутником називається дозволом неоднозначності - пошуком цілого значення числа довжин хвиль. Для вимірювань в режимі з постобробки, який використовується для визначення місця розташування з точністю на рівні сантиметри, це ціле значення визначається під час обробки на комп'ютері. Для вимірювань в реальному часі, які використовуються для визначення місця розташування з точністю на рівні сантиметри, це ціле значення визначається протягом процесу званого инициализацией.
Пропуск циклу сигнал - це стрибок в ціле число циклів в фазі несучої при вимірюванні дальності. Зникнення сигналу може бути викликано перешкодою між сигналом і супутником. Радіоперешкоди, іоносферне обурення, і висока динаміка приймача - все це також може бути причинного зникнення сигналу. Так само прослизання циклу може статися через збій приймача. Пропуск циклу може тривати протягом будь-якого часу.
Вам необхідно знати координати вашої базової станції якомога точніше, так як точність отримується в результаті диференціальної корекції безпосередньо залежить від точності координат базової станції. Існує два методи виконання диференціальної корекції, в реальному часі і в постобробці
Я вважаю, що розвиток СНР добре допомагає розвиватися і країні, якій належить сама СНС. Триває активне освоєння космічного простору поблизу нашої планети. Досягнення в галузі радіоелектроніки дійсно значно допомагають не тільки у військових, але і в цивільних цілях. Завдяки СН, припустимо, значно полегшили пошуки гірських туристів, СН- «помічник» водія на дорогах і не тільки. Але як би там не було, добре в цьому є і погана сторона ... відбувається постійне забруднення навколоземного простору вже використаними супутниками і їх уламками. Нам потрібно заповнювати наші потреби, не зашкодивши навколишньому середовищу, що у нас виходить рідко .... КООРДИНАЦІЙНИЙ НАУКОВО-ІНФОРМАЦІЙНИЙ ЦЕНТР (2002). - офіційне технічний опис параметрів і сигналу ГЛОНАСС. Перевірено 14 грудня 2009.
РОСІЙСЬКИЙ НАУКОВО-ДОСЛІДНИЙ ІНСТИТУТ космічного ПРИЛАДОБУДУВАННЯ (2008). - офіційне технічний опис параметрів і сигналу ГЛОНАСС. Перевірено 14 грудня 2009.
Ростовський державний будівельний університет
Кафедра Прикладної геодезії
Супутникові системи навігації GPS і ГЛОНАСС
Виконав: студ гр. ПГ-579 Веремчук Р. В
Перевірив: Яковлєв В. А
Ростов-на-Дону
Вступ
У грудні 1976 року була прийнята Постанова ЦК КПРС і Ради Міністрів СРСР "Про розгортання Єдиної космічної навігаційної системи ГЛОНАСС (Глобальна Навігаційна Супутникова Система)". Ця постанова по суті лише узаконило вже почалися роботи зі створення нової системи і визначило порядок її розробки і випробувань. Технічні пропозиції щодо системи ГЛОНАСС в складі КА 11Ф654 "Ураган" були розроблені в красноярському НВО прикладної механіки (НВО ПМ) в початку 1976 р і розглянуті міжвідомчою комісією у серпні того ж року. Система ГЛОНАСС представляє друге покоління вітчизняних супутникових навігаційних систем. Створення цієї навігаційної системи було зумовлено потребами нових потенційних споживачів, які потребували високоточної прив'язці свого положення в часі і просторі. В якості таких споживачів виступали авіація, морський флот, наземні транспортні засоби, космічні апарати, а також спеціальні бойові комплекси (зокрема, мобільні МБР середньої і великої дальності). Широке увагу до супутникової навігації привернула успішна експлуатація низькоорбітальних навігаційних супутникових систем морськими споживачами. У 1976 р на озброєння Радянської Армії була прийнята навігаційно-зв'язкова система "Циклон-Б" в складі шести космічних апаратів "Парус", що звертаються на приполярних орбітах заввишки 1000 км. Через три роки була здана в експлуатацію супутникова радіонавігаційна система (СРНС) "Цикада" в складі чотирьох КА на орбітах того ж класу, що і у КА "Парус". І якщо перша система використовувалася виключно в інтересах МО СРСР, то друга призначалася, головним чином, для навігації цивільних морських судів. Оснащення супутникової навігаційної апаратурою судів торгового флоту виявилося дуже вигідним, оскільки завдяки підвищенню точності судноводіння вдавалося настільки заощадити час плавання і паливо, що бортова апаратура споживача окупала себе після першого ж року експлуатації. В ході випробувань цих та передувала їм системи "Циклон" було встановлено, що похибка визначення місцезнаходження рухомого судна по навігаційним сигналам цих супутників становить 250 ... 300 м. З'ясувалося також, що основний внесок в похибка навігаційних визначень вносять похибки переданих супутникам власних ефемерид, які розраховуються і закладаються на борт КА засобами наземного комплексу управління (НКУ). З метою підвищення точності визначення та прогнозування параметрів орбіт навігаційних супутників була відпрацьована спеціальна схема проведення вимірювань параметрів орбіт засобами ПКУ, розроблені більш точні методики прогнозування. Для виявлення локальних особливостей гравітаційного поля Землі, що впливають на вибрані орбіти навігаційних КА (НКА), на такі ж орбіти були запущені спеціальні геодезичні супутники "Космос-842" і "Космос-911". Комплекс вжитих заходів дозволив уточнити координати вимірювальних засобів і обчислити параметри согласующей моделі гравітаційного поля, призначеної спеціально для визначення і прогнозування параметрів руху НКА. В результаті точність переданих в складі навігаційного сигналу власних ефемерид підвищили практично на порядок, так що їх похибка на інтервалі добового прогнозу не перевищувала 70 ... 80 м. Як наслідок, похибка визначення морськими судами свого місцеположення зменшилася до 80 ... 100 м .
Однак виконати вимоги всіх потенційних класів нових споживачів низькоорбітальні системи не могли в силу принципів, закладених в основу їх побудови. Так, якщо для нерухомих споживачів, що мають двоканальну приймальну апаратуру, похибка визначення місцеположення вдалося знизити до 32 м (дані для американської СРНС "Транзит"), то при русі похибки відразу ж починають зростати через неточності числення шляху - низькоорбітальні СРНС не дозволяли визначати швидкість руху. Більш того, по одержуваних вимірам можна визначити тільки дві просторові координати. другим недоліком низькоорбітальних систембула відсутність глобальності покриття, оскільки, наприклад, на екваторі супутники проходили через зону видимості споживача в середньому через 1.5 години, що допускає проведення тільки дискретних навігаційних сеансів. Нарешті, з огляду на використання в сеансі лише одного НКА тривалість вимірювань може доходити до 10 ... 16 хв. Велика тривалість сеансів і значні інтервали між ними роблять неминучим застосування спеціальних заходів для числення шляху. При цьому помилки числення і обмежують точність визначення місця знаходження. Проте була випробувана самолетная апаратура стосовно до сигналів як системи "Транзит", так і "Цикада". При цьому підтвердилося, що похибка визначення місцеположення слабо залежить від маневрів літака і дійсно визначається переважно похибками знання шляховий швидкості, не виходячи за межі 1.8 км.
СРНС другого покоління спочатку проектувалися як системи, яким всі перераховані недоліки не властиві. Головною вимогою при проектуванні було забезпечення споживачеві в будь-який момент часу можливості визначення трьох просторових координат, вектора швидкості і точного часу, що досягається шляхом одночасного прийому сигналів від як мінімум чотирьох НКА. В кінцевому підсумку, це призвело до реалізації важливої технічної ідеї - координації просторового положення НКА на орбітах і координації за часом випромінюваних супутниками сигналів. Координація руху всіх НКА додає системі мережеві властивості, яких вона позбавляється при відсутності корекції положення НКА.
Як орбіт для нової системи спочатку були обрані середньовисокі (20000 км) півдобові орбіти, які забезпечували оптимальне співвідношення між кількістю КА в системі і величиною зони радіообзора. Однак згодом висота робочої орбіти була зменшена до 19100 км. Це було зроблено виходячи з того, що для КА, що мають період обертання, рівний половині доби, проявляється резонансний ефект впливу певних гармонік геопотенциала, що приводить до досить швидкого "руйнування" заданого відносного положення НКА і конфігурації системи в цілому. Очевидно, що в цьому випадку для підтримки системи довелося б частіше проводити корекції орбіти кожного КА. При обраної висоті орбіти для гарантованої видимості споживачем не менше чотирьох супутників їх кількість в системі повинен бути 18, однак воно було збільшено до 24-х з метою підвищення точності визначення власних координат і швидкості споживача шляхом надання йому можливості вибору з числа видимих супутників четвірки, що забезпечує найвищу точність. Слід зазначити, що в даний час ця вимога втратило актуальність, оскільки сучасна стандартна навігаційна апаратура споживача (НАП) має можливість приймати сигнали від 8 до 12 НКА в зоні радиовидимости одночасно, що дозволяє не турбуватися про вибір оптимальної четвірки, а просто обробляти всі прийняті вимірювання .
Однією з головних проблем створення СРНС, що забезпечує беззапитним навігаційні визначення одночасно по декількох супутниках, є проблема взаємної синхронізації супутникових шкал часу з точністю до мільярдних часток секунди (наносекунд, нс), оскільки рассинхронизация випромінюваних супутниками навігаційних сигналів всього в 10 нс викликає додаткову похибка у визначенні місця розташування споживача до 10 ... 15 м. Для вирішення завдання високоточної синхронізації бортових шкал часу потрібна була установка на супутниках високостабільних цезієвого стандартів частоти і наземного водневого стандарту (на порядок більш стабільного), а також створення наземних засобів порівняння шкал з похибкою 3 ... 5 нс.
У 1977-78 рр. в НВО ПМ проводилося ескізне проектування системи, матеріали якого були схвалені у вересні 1978 р міжвідомчою комісією під головуванням генерал-майора І. В. Мещерякова. Тактико-технічне завдання (ТТЗ) на систему ГЛОНАСС було погоджено з головнокомандувачем всіх видів Збройних Сил і міністерствами: Мінобщемаша, Мінрадіопрому, Мінавіапрому, Міноборонпрома, Минморфлотом, Мінрибгоспом, Минсудпрома і Міністерством цивільної авіації. У листопаді 1978 р ТТЗ було затверджено Міністром оборони СРСР.
Однак на той час через занадто довгого періоду узгодження завдання були зірвані початкові терміни по розгортанню системи. Тому 29 серпня 1979 р ГЛОНАСС вийшла нова Постанова ЦК і РМ. У ньому були встановлені наступні терміни виконання робіт по системі:
Початок льотних випробувань і створення системи з 4-6 КА "Ураган" для перевірки основних принципів і технічних характеристик-1981 рік;
Створення системи з 10-12 КА "Ураган" (в двох орбітальних робочих площинах) і здача її на озброєння в складі і з тактико-технічними характеристиками за погодженням між Міноборони, Мінобщемаша і Мінрадіопрому - 1984 рік;
Дооснащення системи до 24 КА - 1987 рік.
Основними розробниками системи в Постанові були визначені:
НВО ПМ Мінобщемаша - по системі в цілому;
ПО "Радіоприлад" (нині РНДІ КП) Мінобщемаша - з наземного комплексу управління, бортовому радіотехнічному комплексу, апаратурі споживачів;
ЛНРТІ (нині РІРВ) Мінрадіопрому - по навігаційно-тимчасового комплексу.
Однак і ці порядок і терміни довелося ще раз уточнити в липні 1981 р новій Постанові ЦК і РМ терміном початку розгортання системи був названий 1982 р
Льотні випробування системи ГЛОНАСС були розпочаті 12 жовтня 1982 р запуском першого КА 11Ф654 "Ураган" N11л і двох габаритно-вагових макетів 11Ф654ГВМ. Потім в наступних шести запусках на орбіту виводилися за два штатних КА і одному ГВМ. Це було пов'язано з неготовністю електронної апаратури супутників. Лише з восьмого запуску в рамках розгортання системи ГЛОНАСС (16 вересня 1986 г.) на орбіту були виведені відразу три штатних КА. Двічі (10 січня і 31 травня 1989 г.) разом з двома КА "Ураган" на орбіту виводилися пасивні геодезичні КА ПКА "Еталон", що використовуються для уточнення параметрів гравітаційного поля і його впливу на орбіти КА "Ураган".
Для відпрацювання навігаційної апаратури були виготовлені базові комплекти по шість штук кожного найменування для ВПС, ВМФ, СВ, МГА, ММФ і РВСН. Всього для льотних випробувань було виділено 22 космічні апарати(9-10 запусків). Це число КА було витрачено до 16 вересня 1987 г. Однак до цього моменту система не була розгорнута навіть для обмеженого використання (12 КА в двох площинах). Лише після запуску 4 квітня 1991 р складі ГЛОНАСС виявилося одночасно 12 працездатних КА.
24 вересня 1993 перший чергу системи ГЛОНАСС була прийнята на озброєння. З цього моменту стали проводитися запуски КА в третю орбітальну площину. 14 грудня 1995 року, слідом 27-го запуску "Протона-К" з "Ураганами" розгортання штатної конфігурації системи ГЛОНАСС було завершено. Всього з жовтня 1982 по грудень 1998 року на орбіту були виведені 74 КА "Ураган" і вісім його габаритно-вагових макетів (ГВМ). За час розгортання системи шість "ураганів" виявилися на нерозрахованих орбітах через відмови розгінного блоку 11С861. За оцінками, проведеним у 1997 році, на розгортання системи було витрачено майже 2.5 млрд $.
Основні принципи роботи системи ГЛОНАСС
Супутники системи ГЛОНАСС безперервно випромінюють навігаційні сигнали двох типів: навігаційний сигнал стандартної точності (СТ) в діапазоні L1 (1,6 ГГц) і навігаційний сигнал високої точності (ВТ) в діапазонах L1 і L2 (1,2 ГГц). Інформація, яку надає навігаційним сигналом СТ, доступна всім споживачам на постійній і глобальній основі і забезпечує, при використанні приймачів ГЛОНАСС можливість визначення:
· Горизонтальних координат з точністю 50-70 м (ймовірність 99,7%);
· Вертикальних координат з точністю 70 м (ймовірність 99,7%);
· Складових вектора швидкості з точністю 15 см / с (ймовірність 99,7%)
· Точного часу з точністю 0,7 мкс (вірогідність 99,7%).
Ці точності можна значно поліпшити, якщо використовувати диференційний метод навігації і / або додаткові спеціальні методи вимірювань.
Сигнал ВТ призначений, в основному, для споживачів МО РФ, і його несанкціоноване використання не рекомендується. Питання про надання сигналу ВТ цивільним споживачам знаходиться в стадії розгляду.
Для визначення просторових координат і точного часу потрібно прийняти і обробити навігаційні сигнали щонайменше від 4-х супутників ГЛОНАСС. При прийомі навігаційних радіосигналів ГЛОНАСС приймач, використовуючи відомі радіотехнічні методи, вимірює дальності до видимих супутників і вимірює швидкості їх руху.
Одночасно з проведенням вимірів в приймальнику виконується автоматична обробка містяться в кожному навігаційному радіосигналі міток часу і цифрової інформації. Цифрова інформація описує положення даного супутника в просторі і часі (ефемериди) щодо єдиної для системи шкали часу і в геоцентричної пов'язаної декартовій системі координат. Крім того, цифрова інформація описує положення інших супутників системи (альманах) у вигляді кеплерівських елементів їх орбіт і містить деякі інші параметри. Результати вимірювань і прийнята цифрова інформація є вихідними даними для вирішення навігаційного завдання по визначенню координат і параметрів руху. Навігаційна завдання вирішується автоматично в обчислювальному пристрої приймача, при цьому використовується відомий метод найменших квадратів. В результаті рішення визначаються три координати місця розташування споживача, швидкість його руху і здійснюється прив'язка шкали часу споживача до високоточної шкалою координованого всесвітнього часу (UTC).
радіонавігаційне поле
Навігаційні радіосигнали, що випромінюються штатними НКА, утворюють радіонавігаційне поле в навколоземному просторі.
У СРНС ГЛОНАСС кожен штатний НКА випромінює навігаційні радіосигнали 1600 МГц і 1250 МГц в сторону Землі за допомогою передавальних антен, робоча частина діаграми спрямованості (ДН) яких має ширину 2 = 38 і "висвітлює" диск Землі з надлишком до висоти h 0 над поверхнею.
Робочу частину ДН можна представити у вигляді конусного радиолуча з кутом 2 0 при вершині. Очевидно, що
sin 0 = (h 0 + r) / (H + r),
де r = 6400 км радіус Землі; H = 19100 км висота орбіти НКА.
Підставивши 0 = 19, отримаємо h 0 = 2000 км.
При повній ОГ (24 штатних НКА) радіонавігаційне поле на висотах h h 0 = 2000 км безперервно в просторі, тобто споживач в будь-якій точці цього простору "висвітлюється" радиолучами не менше ніж від чотирьох НКА, утворюють по відношенню до нього задовільний по геометричному фактору сузір'я для оперативного автономного визначення координат і вектора швидкості.
На висотах h h 0 радіонавігаційне поле стає дискретним в просторі. Космічні об'єкти на висотах h 0 h H "висвітлені" радиолучами від необхідного для оперативної навігації сузір'я (не менше чотирьох НКА, включаючи НКА нижче місцевого горизонту) не скрізь, а тільки при знаходженні в певних областях простору.
Космічні об'єкти на висотах h H (наприклад, на геостаціонарній орбіті) будуть "висвітлені" на деяких ділянках своєї орбіти радиолучом від одного або двох НКА (при повній ОГ), і НАП може не оперативно визначити орбіту космічного об'єкта на основі обробки результатів прийому навігаційних радіосигналів на "висвітлених" ділянках орбіти.
Обмежимося розглядом безперервного радіонавігаційного поля (h h 0). Основною характеристикою радіонавігаційного поля для наземного споживача є потужності навігаційного сигналу від околозенітная і прігорізонтного НКА на виході "стандартної" прийомної антени (без урахування відображень від поверхні Землі):
P 0 = P п G () G 0 () 2 / (4 R) 2,
де P п потужність випромінювання передавача; G () коефіцієнт спрямованості передавальної антени (з урахуванням втрат в АФУ) в напрямку на антену прийому G 0 () коефіцієнт спрямованості "стандартної" прийомної антени в напрямку на передавальну антену; довжина хвилі несучого коливання радіосигналу; R дальність від прийомної антени до передавальної антени.
В системі ГЛОНАСС передавальні антени для навігаційних радіосигналів на НКА мають кругову праву поляризацію випромінювання.
Коефіцієнт спрямованості G () передавальних антен в робочому секторі напрямків 19 відносно осі антени становить
Як "стандартної" прийомної антени зручно розглядати ізотропну приймальню антену з круговою поляризацією, G 0 () = 1.
Дальність R від прийомної антени, розміщеної на поверхні Землі, до околозенітная ( = 90) НКА складе R = H = 19100 км, до прігорізонтного ( = 5) НКА складе R = 24000 км.
Бюджет потужності P 0 вузькосмугових навігаційних радіосигналів на виході "стандартної" прийомної антени:
| 1600 МГц | 1250 МГц | |||
| , кут. град. | 90 | 5 | 90 | 5 |
| P п, дБ Вт | | | ||
| G (), дБ | +10 | +12 | +9 | +11 |
| ( R) 2, дБ | 182 | 184 | 180 | 182 |
| G 0 (), дБ | 0 | 0 | ||
| P 0, дБ | 157 1 | 157 1 | 162 1 | 162 1 |
Відзначимо, що потужність навігаційного сигналу, що приймається наземним споживачем за допомогою ізотропного антени, однакова для околозенітная і прігорізонтного НКА.
Структура сигналу ГЛОНАСС
грубого далекомірного коду, переданого зі швидкістю 511 Кбіт / с (рис. 6в);
послідовності навігаційних даних, що передаються зі швидкістю 50 біт / с (рис. 6а);
меандрового коливання, переданого зі швидкістю 100 біт / с (рис. 6б).
Сигнал в діапазоні L1 (аналогічний C / A-коду в GPS) доступний для всіх споживачів в зоні видимості КА. Сигнал в діапазоні L2 призначений для військових потреб, і його структура не розкривається.
Для навігаційних радіосигналів ЦІ формується на борту НКА на основі даних, що передаються від ПКУ системи на борт НКА за допомогою радіотехнічних засобів. Передана в навігаційних радиосигналах ЦІ структурована у вигляді рядків, кадрів і суперкадрів.
У вузькополосному навігаційному радіосигналі 1600 МГц рядок ЦІ має тривалість 2 с (разом з МВ) і містить 85 двійкових символів тривалістю по 20 мс, переданих у відносному коді. Перший символ кожного рядка є початковим ( "холостяком") для відносного коду. Останні вісім символів в кожному рядку є перевірочними символами коду Хеммінга, що дозволяють виправляти одиночний помилковий символ і виявляти два помилкових символу в рядку. Кадр містить 15 рядків (30 с), суперкадр 5 кадрів (2,5 хв).
У складі кожного кадру передається повний обсяг оперативної ЦІ і частина альманаху системи. Повний альманах передається в межах суперкадра.
Оперативна ЦІ в кадрі відноситься до НКА, випромінює навігаційний радіосигнал, і містить:
· Ознаки достовірності ЦІ в кадрі;
· Час початку кадру t k;
· Ефемеридних інформацію координати і похідні координат НКА в прямокутної геоцентричної системі координат на момент часу t 0;
· Частотно-часові поправки (ЧВП) на момент часу t 0 у вигляді відносної поправки до несучої частоті навігаційного сигналу та поправки до БШВ НКА;
· Час t 0.
Час t 0, до якого "прив'язані" ЕІ і ЧВП, кратні 30 хв від початку доби.
Альманах системи містить:
· Час, до якого належить альманах;
· Параметри орбіти, номер пари несучих частот і поправку до БШВ для кожного штатного НКА в ОГ (24 НКА);
· Поправку до ШВ системи щодо ШВ країни, похибка поправки не більше 1 мкс.
Альманах системи необхідний в НАП для планування сеансу навігації (вибір оптимального сузір'я НКА) і для прийому навігаційних радіосигналів в системі (прогноз доплерівського зсуву несучої частоти). Оперативна ЦІ необхідна в НАП в сеансі навігації, так як ЧВП вносяться в результати вимірювань, а ЕІ використовується при визначенні координат і вектора швидкості споживача.
В системі НАВСТАР ЦІ в вузькосмугових навігаційних радиосигналах структурована таким чином: рядок має тривалість 6 c, кадр містить 5 рядків (30 с), суперкадр 25 кадрів (12,5 хв).
Вузькополосні навігаційні радіосигнали в системі ГЛОНАСС забезпечують більш оперативний прийом (оновлення) альманаху за рахунок більш короткої тривалості суперкадрів (2,5 хв) у порівнянні з системою НАВСТАР (12,5 хв)
Навігаційні вимірювання в багатоканальної НАП
Розглянемо багатоканальну НАП, що використовує вузькосмугові радіосигнали і призначену для глобальної навігації наземних рухомих об'єктів (сухопутних, морських, повітряних). Будемо вважати, що в НАП застосовується широконаправлені приймальня антена.
У кожному каналі НАП в режимі стеження за вузькосмуговим навігаційним радіосигналом приймається ЦІ і щомиті вимірюються два навігаційних параметра псевдодальностей і радіальна псевдошвидкостей.
Псевдодальностей від об'єкта до НКА вимірюється в НАП допомогою вимірювання зсуву прийнятої ПСП1 щодо опорного сигналу в НАП. Радіальна псевдошвидкостей об'єкта щодо НКА вимірюється за допомогою вимірювання зсуву несучої частоти прийнятого навігаційного сигналу щодо частоти опорного сигналу в НАП. Опорний сигнал в НАП формується з використанням кварцового генератора.
Результати вимірювань псевдодальностей S k (t) не менше, ніж для чотирьох обраних НКА (k = 1,2,3,4) з урахуванням введення ЧВП, що містяться в кадрі ЦІ, можна виразити таким чином:
S k (t) = R k (t) + c (t) + c k (t) + S k (t),
де R k (t) дальність від об'єкта до НКА; з швидкість світла; (t) зрушення ШВ НАП (опорного сигналу) щодо ШВ системи; k (t) похибка ЧВП; S k (t) похибка вимірювань в НАП.
У двухдиапазонной НАП навігаційнівимірювання псевдодальностей на двох несучих частотах в 1600 МГц і н 1250 МГц дозволяють виключити іоносферні похибки вимірювань наступним чином. Позначимо S 0 (t) виміряна псевдодальностей без іоносферних похибок. Оскільки для верхнього і нижнього діапазонів
S в (t) = S 0 (t) + А / ; S н (t) = S 0 (t) + А / ,
де А / 2 іоносферних похибка вимірювання псевдо, то алгоритм отримання об'єднаного результату S 0 (t), в якому виключені іоносферні похибки буде наступним:
S 0 (t) = S в (t) -S н (t); m = н / в = 7/9.
Похибка дводіапазонного вимірювання псевдо можна оцінити таким чином:
S 0 = S в - S н = 2,53 S в - 1,53 S н.
У сеансі навігації результати вимірювань в НАП псевдодальностей щодо не менше чотирьох НКА, обраних для сеансу, і прийнята ЕІ від обраних НКА дозволяють визначити три координати об'єкта і зрушення місцевої ШВ об'єкта (опорного сигналу) щодо ШВ системи.
Завдання цього розділу оцінити похибка вимірювання псевдодальностей в багатоканальної НАП при використанні вузькосмугових навігаційних радіосигналів. Основними джерелами похибок вимірювання псевдо в багатоканальної НАП є: шуми і многолучевость на вході приймача, тропосфера, іоносфера (в однодіапазонні НАП).
При оцінці похибок псевдодальності, обумовлених шумами і многолучевости на вході приймача, будемо вважати, що в каналах НАП в ланцюгах стеження за ПСП1 застосовуються дискримінатори затримки, у яких ширина центрального лінійного ділянки дискримінаційної характеристики дорівнює тривалості символу ПСП1.
Шумову похибка (S) однодіапазонні вимірювань псевдодальності можна оцінити таким чином:
де c швидкість світла; F 1 тактова частотаПСП1; P c / g ш енергетичний потенціал вузькосмугового навігаційного сигналу на вході приймача; k погіршення енергетичного потенціалу в приймальнику (k 1,5); T 0 інтервал осереднення (накопичення) вимірювань.
Енергетичні потенціали вузькосмугових навігаційних радіосигналів на вході приймача в НАП з широконаправлені приймальні антеною (див. Вище) становлять [дБ Гц]:
| = 90 | = 5 | |
| 1600 МГц | +47...49 | +39...44 |
| 1250 МГц | +43...45 | +34...39 |
і відповідно шумові похибки однодіапазонні вимірювань при осреднении T 0 = 1с складуть [м]:
| | | |
| (S в) 1600 МГц | 1,7...2,1 | 3,3...6,0 |
| (S н) 1250 МГц | 3,0...4,0 | 5,9...10,5 |
Шумову похибка дводіапазонного вимірювання псевдо знайдемо наступним чином:
(S 0) = (2 + 2) 1/2;
і відповідно отримаємо при T 0 = 1c
(S 0) = 
Навігаційний радіосигнал від прігорізонтного НКА може приходити до наземного рухомого об'єкту не тільки прямим шляхом але і за рахунок дзеркального відображення від земної поверхні (многолучевость). Відбитий радіосигнал приходить до об'єкта з напряму нижче місцевого горизонту, і при дзеркальному відображенні змінюється на протилежний зміст кругової поляризації радіосигналу. З урахуванням даної обставини і за рахунок просторової вибірковості прийомної антени потужність відбитого радіосигналу P c2 буде набагато меншою потужності прямого радіосигналу P c1 на вході приймача.
Похибка вимірювання псевдо до прігорізонтного НКА, обумовлена многолучевостью при використанні вузькосмугового навігаційного сигналу, буде максимальна в гіршій ситуації, коли затримка t відбитого радіосигналу щодо прямого радіосигналу на вході приймача буде дорівнює t = 1 / 2F 1, де F 1 тактова частота ПСП1 . При t 1 / 2F 1, і при t 3 / 2F 1 похибка буде набагато меншою, ніж в гіршій ситуації. При T 0 = 1 c похибка псевдодальності до прігорізонтного НКА через многолучевости в гіршій ситуації для вузькосмугових навігаційних радіосигналів буде дорівнює
Підставляючи P c2 / P c1 = - (30 ... 32) дБ, отримаємо (S) = 3,0 м, яке добре узгоджується з експериментальними даними. Отже, при дводіапазонних вимірах (1600 МГц, 1250 МГц) і T 0 = 1 c отримаємо:
(S 0) = ![]() (S) = 9,0м.
(S) = 9,0м.
У тропосфері швидкість поширення радіохвилі дорівнює c = c 0 / n (h), де з 0 швидкість поширення світла у вакуумі; n (h) коефіцієнт заломлення тропосфери на висоті h над поверхнею Землі, n (h) .
Тропосферні похибка беззапитним вимірювання дальності (псевдо) для НКА при кутах піднесення НКА можна знайти наступним чином:
R () = 
У НАП тропосферні похибки компенсуються розрахунковими поправками. Якщо розраховувати тропосферні поправки для середніх параметрів тропосфери (глобально), то їх похибка ( R) складе 10% від величини поправки R ().
Для оцінки похибок можна скористатися простою експоненційної моделлю тропосфери:
n (h) = n (0) e -h / а;
і, підставивши середні значення n (0) = 3 10 -4, a = 8 км, отримаємо:
Проведемо оцінку іоносферних похибок вимірювання псевдо в однодіапазонні НАП (1600 МГц). Іоносфера Землі починається з висоти 100 км, на висотах від 300 до 400 електронна концентрація в іоносфері максимальна і вище зі збільшенням висоти зменшується приблизно експоненціально і на висоті 900 км електронна концентрація в іоносфері становить приблизно 10% від максимальної.
Групова швидкість радіосигналу в іоносфері дорівнює с = з 0 n (h), де з 0 швидкість світла у вакуумі, n (h) коефіцієнт заломлення іоносфери на висоті h над поверхнею Землі, n (h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 МГц можна скористатися рівністю:
n (h) = 1-n (h) = 40,3 N (h) / f 2,
де N (h) електронна концентрація іоносфери на висоті h [ел / см 3]; f-несуча частота радіосигналу [кГц].
Проведемо оцінку іоносферних похибок беззапитним вимірювання дальності (псевдо) до околозенітная і прігорізонтного НКА.
Іоносферну похибка при вертикальному проходженні радиолуча до наземного об'єкту від зенітного НКА можна оцінити таким чином:
R 1 = 
Вертикальний профіль величини n (h) в залежності від висоти можна представити у вигляді:
1. при h h 1 = 100 км n (h) = 0;
2. при h 1 h h 2 = 300 км n (h) лінійно зростає до n m, де n m максимальне значення n (h);
3. при h 2 h h 3 = 400 км n (h) = n m;
4. при h h 3 = 400 км n (h) = n m e
Використовуючи дану апроксимацію для n (h), отримаємо формулу для оцінки іоносферної похибки беззапитним вимірювань дальності (псевдо) до зенітного НКА
R 1 = b е n m;
b е = 0,5 (h 2 -h 1) + (h 3 -h 2) + a = 400 км.
Параметр b е можна назвати товщиною еквівалентної іоносфери, у якій n (h) = n m на висотах h = 200 ... 600 км і поза цими висот n (h) = 0.
Іоносферну похибка R 2 псевдодальності горізонтного НКА ( ) можна приблизно оцінити таким чином:
R 2 = R 1 / cos; sin = r / (r + h 3),
де кут між радиолучом від горізонтного НКА ( ) і місцевої вертикаллю на висоті h 3 = 400 км (середина еквівалентної іоносфери); r радіус Землі. Проводячи обчислення, отримаємо і відповідно R 2 = 3,3 R 1. Для прігорізонтного НКА ( = 5 ... 10) можна вважати, що R 2 = 3 R 1.
Знайдемо величину n m для несучої частоти f = 1600 МГц навігаційного сигналу. У середніх широтах в найгірший сезон (зимовий день) в роки максимальної сонячної активності максимальна електронна концентрація на висотах 300 ... 400 км може досягати N = 3,0 10 6 ел / см 3, і відповідно для f = 1,6 10 6 кгц отримаємо
n m = 3,8 10 -5, R 1 = 15 м, R 2 = 45 м.
Вночі та влітку іоносферні похибки будуть в кілька разів менше. У роки мінімальної сонячної активності іоносферні похибки навіть в зимовий день в 5 ... 6 разів менше наведених вище максимальних значень.
Обговоримо перспективу, коли в системі ГЛОНАСС будуть експлуатуватися НКА другої модифікації, які будуть випромінювати двокомпонентний навігаційний радіосигнал 1250 МГц замість однокомпонентного радіосигналу 1250 МГц в НКА першої модифікації. Відповідно з'являється можливість проводити вимірювання навігаційних параметрів в двухдиапазонной НАП з використанням вузькосмугових радіосигналів 1600 МГц і1250 МГц для виключення іоносферних похибок вимірювань. Але при дводіапазонного вимірі псевдодальності значно зростуть шумові похибки і похибки через многолучевости по порівнянні з однодіапазонні НАП (1600 МГц). На динамічних об'єктах з недетермінованої моделлю руху (T 0 = 1 с) недоцільно застосовувати дводіапазонні вузькосмугові навігаційні радіосигнали 1600 МГц і 1250 МГц для визначення координат об'єкту, оскільки в цьому випадку, як було показано вище:
1. шумові похибки псевдодальності до прігорізонтного НКА складуть (S 2) = 12 ... 22 м, тобто перевищать іоносферні похибки вимірювань в однодіапазонні НАП в найгірший сезон (зимовий день);
2. похибки псевдодальності до прігорізонтного НКА, обумовлені многолучевостью, складуть (S 2) = 9 м (в гіршій ситуації), тобто будуть сумірні з іоносферними похибками в однодіапазонні НАП в найгірший сезон (зимовий день).
На малодинамічними наземних об'єктах доцільно застосовувати дводіапазонні вузькосмугові навігаційні радіосигнали, оскільки в НАП на малодинамічними об'єктах можна довго осередненою результати вимірювань (T 0 = 30 c) і знижувати до необхідного рівня шумові похибки псевдодальності і похибки через многолучевости.
Структура навігаційних радіосигналів в системі ГЛОНАСС
В системі ГЛОНАСС кожен штатний НКА в ОГ постійно випромінює шумоподібні безперервні навігаційні радіосигнали в двох діапазонах частот 1600 МГц і 1250 МГц. У НАП навігаційні вимірювання в двох діапазонах частот дозволяють виключити іоносферні похибки вимірювань.
Кожен НКА має цезієвий АСЧ, який використовується для формування бортовий шкали (БШВ) і навігаційних радіосигналів 1600 МГц і 1250 МГц.
Шумоподібні навігаційні радіосигнали в ОГ НКА розрізняються несучими частотами. Оскільки для взаімноантіподних НКА в орбітальних площинах можна застосовувати однакові несучі частоти, то для 24 штатних НКА мінімально необхідне число несучих частот в кожному діапазоні частот одно 12. Дане твердження досить очевидно, якщо мати на увазі наземних споживачів (сухопутних, морських, повітряних), оскільки в зоні радиовидимости наземного споживача не можуть одночасно перебувати взаємно антіподние НКА. Космічний споживач може одночасно "бачити" взаімноантіподние НКА. Однак є два сприятливих обставини.
Перше полягає в тому, що з двох взаімноантіподних НКА хоча б один буде знаходитися нижче місцевого горизонту по відношенню до космічного споживачеві. Практично неможливо застосувати на космічному об'єкті одну широконаправлені антену, здатну приймати навігаційні радіосигнали від всіх "видимих" НКА вище і нижче місцевого горизонту. Тому в НАП на космічному об'єкті застосовують: або одну широконаправлені антену для прийому навігаційних радіосигналів від НКА, що знаходяться вище місцевого горизонту; або кілька антен і кілька приймачів для прийому навігаційних радіосигналів від НКА, що знаходяться вище і нижче місцевого горизонту.
В обох варіантах НАП на космічному об'єкті буде здійснювати ефективну просторову селекцію навігаційних радіосигналів від взаімноантіподних НКА.
Друга обставина полягає в тому, що в НАП в сеансі навігації здійснюється пошук несучої частоти кожного прийнятого навігаційного сигналу в межах вузької смуги ( 1 кГц) близько прогнозованого значення з урахуванням доплерівського зсуву несучої частоти. Доплеровский зрушення може мати максимальні значення 5 кГц в НАП на наземних об'єктах і 40 кГц в НАП на низькоорбітальних космічних об'єктах. Отже, в НАП на космічному об'єкті здійснюється ефективна доплеровская селекція навігаційних радіосигналів від радіовидимість НКА.
Таким чином, навігаційні радіосигнали взаімноантіподних НКА з однаковими несучими частотами будуть надійно розділені в НАП на космічному об'єкті за рахунок просторової і доплеровской селекції.
Навігаційний радіосигнал 1600 МГц двокомпонентний. На заданій частоті в радіопередавачі формуються два однакових по потужності шумоподібних фазоманіпулірованних навігаційних радіосигналу "в квадратурі" (взаємний зсув по фазі на 90): вузькосмуговий і широкосмуговий.
Вузькосмуговий навігаційний радіосигнал 1600 МГц утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної двійковій псевдовипадковою послідовністю (ПСП1) з тактовою частотою F 1 = 0,511 МГц і з періодом повторення Т 1 = 1 мс (511 тактів). ПСП1 є М - послідовність з характеристичним поліномом 1 + X 3 + X 5. Шляхом інвертування ПСП1 передаються мітки часу (МВ) бортовий шкали часу (БШВ) НКА і виконавчі символи цифрової інформації (ЦІ). Мітка часу має тривалість 0,3 с і передається в кінці кожного двосекундною інтервалу часу (в кінці парних секунд). Мітка часу містить 30 двійкових символів тривалістю 10 мс і являє собою скорочену на один символ 31-символьну М-послідовність.
У кожній двухсекундной рядку на інтервалі часу 1,7 з передаються 85 довічних символів ЦІ, тривалістю 20 мс і перемножені на меандр, що має тривалість символів 10 мс. Межі символів меандру, МВ і ЦІ когерентні. У приймальнику за допомогою меандру здійснюється символьна синхронізація для МВ і з її допомогою рядкова і символьна синхронізація ЦІ.
Широкосмуговий навігаційний радіосигнал 1600 МГц утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної двійковій послідовністю ПСП2 з тактовою частотою F 2 = 5,11 МГц. Шляхом інвертування ПСП2 передаються виконавчі символи ЦІ тривалістю 20 мс.
Навігаційний радіосигнал 1250 МГц, що випромінюється НКА першої модифікації однокомпонентний широкосмуговий шумоподібний радіосигнал, утворений за допомогою маніпуляції фази несучого коливання на 180 періодичної двійковій ПСП2 (F 2 = 5,11 МГц) без інвертування, тобто без передачі ЦІ. Навігаційний радіосигнал 1250 МГц, що випромінюється НКА другої модифікації, буде містити два однакових по потужності шумоподібних радіосигналу 1250 МГц в квадратурі:
1. вузькосмуговий навігаційний радіосигнал 1250 МГц з ПСП1 (F 1 = 0,511 МГц, T 1 = 1 мс);
2. широкосмуговий навігаційний радіосигнал 1250 МГц з ПСП2 (F 2 = 5,11 МГц) без ЦІ.
Оскільки частота інвертування ПСП багато менше її тактової частоти, то ширина основного "пелюстки" огинаючої спектра потужності шумоподобного фазоманіпулірованних навігаційного сигналу дорівнює подвійному значенню тактової частоти ПСП. Отже, ширина основного "пелюстки" огинаючої спектра потужності вузькосмугового навігаційного сигналу дорівнює 1,022 МГц, широкосмугового 10,22 МГц.
При проектуванні СРНС ГЛОНАСС була вироблена наступна "сітка" номінальних значень несучих частот для навігаційних радіосигналів в двох діапазонах частот верхньому 1600 МГц (В) і нижньому 1250 МГц (Н):
Вk = в0 + k в; в0 = 1602,0000 МГц;
в = 0,5625 МГц;
нk = н0 + k н; н0 = 1246,0000 МГц;
н = 0,4375 МГц;
Вk / нk = 9/7;
де k умовний порядковий номер пари несучих частот Вk і нk для навігаційних радіосигналів 1600 МГц і 1250 МГц.
Радіопередавачі навігаційних радіосигналів в НКА першої модифікації випромінюють навігаційні радіосигнали на перемикаються несучих частотах з номерами k = 1, ..., 24.
Наведемо значення крайніх несучих частот навігаційних радіосигналів:
в1 = 1602,5625 МГц; в24 = 1615,5000 МГц;
Н1 = 1246,4375 МГц; Н24 = 1256,5000 МГц;
Робочі спектри навігаційних радіосигналів на несучих частотах з номерами k = 1, ..., 24 займають смуги частот:
а) вузькосмугові навігаційні радіосигнали 1602,0 ... 1616,0 МГц;
б) широкосмугові навігаційні радіосигнали 1597,4 ... ... 1620,6 МГц, 1241,3 ... 1261,6 МГц.
В діапазоні частот 1600 МГц і 1250 МГц відповідно до Регламенту радіозв'язку виділені смуги частот:
а) для супутникового радіозв'язку (Космос Земля) 1559,0 ... 1610,0 МГц; 1215,0 ... 1260,0 МГц;
б) для повітряної радіонавігації 1559,0 ... 1626,5 МГц.
ВАКР-87 розподілив смугу частот 1610,6 ... 1613,8 МГц для радіоастрономії на первинній основі. Щоб знизити і в подальшому повністю виключити радіоперешкоди радіотелескопу в діапазоні частот 1610,6 ... 1613,8 МГц з боку навігаційних радіосигналів системи ГЛОНАСС, Адміністрація системи ГЛОНАСС прийняла в 1993р. рішення, згідно з яким для 24 штатних НКА в системі ГЛОНАСС будуть використовуватися наступні номери (k) несучих частот:
1. до1998 р k = 1, ..., 15; k = 21, ..., 24;
2. c 1998 р до 2005 р k = 1, ..., 12;
3. c 2005 р k = -7, ..., 4.
На першому етапі (до 1998 р) в радіоастрономічної смузі практично немає спектрів вузькосмугових навігаційних радіосигналів 1600 МГц, а до 2005 р з радіоастрономічної смуги будуть виведені і спектри широкосмугових навігаційних радіосигналів. Третій етап буде реалізований за рахунок застосування НКА другої модифікації, в якій передавачі навігаційних радіосигналів можуть випромінювати навігаційні радіосигнали на будь-якій парі перемикаються несучих частот з номерами k = -7,0, ... + 12.
В системі НАВСТАР використовуються безперервні шумоподібні навігаційні радіосигнали на двох несучих частотах (верхньої і нижньої)
в = 1575,42 МГц; н = 1227,6 МГц,
і застосовується кодове розділення навігаційних радіосигналів для 24 штатних НКА.
Навігаційний радіосигнал на верхній частоті в двокомпонентний, він містить два фазоманіпулірованних шумоподібних навігаційних радіосигналу в квадратурі (зсув по фазі на 90): вузькосмуговий і широкосмуговий.
Вузькосмуговий навігаційний радіосигнал в утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної ПСП1 з тактовою частотою F 1 = 1,023 МГц і з періодом повторення T 1 = 1 мс. Двійкові символи ЦІ тривалістю 20 мс передаються інвертуванням ПСП1.
Широкосмуговий навігаційний радіосигнал в утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної ПСП2 з тактовою частотою F 2 = 10,23 МГц. Двійкові символи ЦІ тривалістю символів 20 мс передаються інвертуванням ПСП2.
Навігаційний радіосигнал н однокомпонентний, широкосмуговий, утворений за допомогою маніпуляції фази несучого коливання на 180 періодичної ПСП2 без інвертування.
Широкосмугові навігаційні радіосигнали в системах НАВСТАР і ГЛОНАСС призначені для використання санкціонованими споживачами і мають захист від несанкціонованого використання.
Вузькополосні навігаційні радіосигнали в системах НАВСТАР і ГЛОНАСС є відкритими і призначені для цивільних споживачів. Але в системі НАВСТАР ці сигнали штучно спотворюються за допомогою процедури селективного доступу, який погіршує точність навігації для неліцензійних споживачів.
Точність глобальної навігації наземних рухомих об'єктів
Проведемо оцінку точності визначення координат наземного рухомого об'єкта при глобальної оперативної навігації за допомогою багатоканальної НАП, що використовує вузькосмугові навігаційні радіосигнали з частотою 1600 МГц в системі ГЛОНАСС з повною ОГ штатних НКА.
Похибка визначення координат рухомого об'єкта залежить від геометричних факторів використовуваного в сеансі навігації сузір'я радіовидимість НКА і обумовлені похибками ЕІ і ЧВП в кадрах ЦІ, прийнятих від НКА, і похибками вимірювань в НАП псевдодальностей до НКА.
При оцінці точності координат рухомого об'єкта похибки ЕІ і ЧВП можна перерахувати в еквівалентні похибки псевдодальностей до НКА.
Похибки координат НКА, перелічені в еквівалентні похибки псевдодальності, є проекції похибок координат НКА на напрям від НКА до об'єкта. Позначимо: похибки координат НКА в вертикальній і горизонтальній площинах. З простих геометричних побудов можна отримати наступні формули для перерахунку похибок координат НКА в еквівалентні похибки псевдодальностей (діяльностей) від об'єкта до НКА:
1. для околозенітная НКА
S 1 = H 1 при ;
S 1 = H 1 + 0,15 M 1 при 45;
2. для прігорізонтного НКА
S 2 = H 2 + 0,25 M 2 при 2 0.
Похибки ЕІ при прогнозі на добу для НКА першої модифікації (див. Вище) в середньому складають (H) = 4 м, (L) = 15 м, і, отже, еквівалентні похибки псевдодальностей складуть:
(S 1) = 4,0 ... 4,6 м і (S 2) = 5,5 м.
Похибка ЧВП при прогнозі на 12 год для НКА першої модифікації становить Б = 14 нс і, відповідно, еквівалентна похибка псевдодальності дорівнює S) = 4,2 м.
При використанні вузькосмугових навігаційних радіосигналів похибки вимірювань псевдодальності для околозенітная S 1) і прігорізонтного S 2) НКА наведені вище.
Складемо сумарний бюджет похибок псевдодальностей без іоносфери (який будемо називати інструментальною похибкою псевдодальності) для багатоканальної НАП, що використовує вузькосмугові однодіапазонні (1600 МГц) навігаційні радіосигнали (T 0 = 1 с):
У шестиканальної НАП на наземному рухомому об'єкті максимальні (0,95) інструментальні похибки визначення місця розташування об'єкта в горизонтальній p і вертикальної z площинах пов'язані з інструментальними похибками псевдодальності до "високого" (околозенітная) НКА (S 1) і до "низького" (прігорізонтного ) НКА (S 2) наступним чином (див. вище):
в кращих ситуаціях p = 2,0 (S 2); z = 2,0 (a);
в гірших ситуаціях p = 2,2 (S 2); z = 2,2 (a),
(a) = 1/2.
Використовуючи ці формули і отримані вище значення інструментальних похибок псевдодальностей, знайдемо оцінки максимальних інструментальних похибок визначення місця розташування наземних динамічних (T 0 = 1 с) об'єктів при використанні вузькосмугових навігаційних радіосигналів в однодіапазонні шестиканальної НАП (1600 МГц):
1. в кращих ситуаціях (S 1) = 6,2 м; (S 1) = 7,7 м і відповідно p = 15,4 м; z = 34 м;
2. в гірших ситуаціях (S 1) = 6,6 м; (S 1) = 9,6 м і відповідно p = 21 м; z = 42 м.
Сувора оцінка вкладу іоносферних похибок визначення координат наземного об'єкта при застосуванні однодіапазонні НАП є досить складним завданням, дамо приблизний аналіз.
У попередньому розділі були оцінені іоносферні похибки вимірювання псевдодальностей в однодіапазонні НАП. Було показано, що іоносферних похибка псевдодальності (дальності) до прігорізонтного НКА ( = 5 10) дорівнює R 2 = 3 R 1, де R 1 іоносферних похибка дальності при вертикальному радіопромені. Іоносферні похибки псевдодальностей в сеансі залежать від часу проведення сеансу: мінімальні вночі, максимальні днем.
Нехай наземний об'єкт знаходиться під перетином двох орбітальних кілець, і в сеансі навігації використовуються шість НКА: два околозенітная і чотири прігорізонтних. Очевидно, що якщо сеанс навігації проводиться в околополуденное час, то іоносферні похибки псевдодальностей для прігорізонтних НКА будуть мало відрізнятися один від одного і відповідно чотири різниці між псевдодальністю до прігорізонтного і до зенітного НКА будуть приблизно однакові D = R 2 - R 1 = 2 R 1. У цій ситуації іоносферні похибки визначення координат наземного об'єкта в сеансі навігації в околополуденное час можна оцінити як
z = 2 D = 4 R 1; x, y = 0,5 D = R 1.
Якщо сеанс навігації проводиться в ранковий або вечірній час, то іоносферні похибки псевдодальностей до прігорізонтних НКА будуть сильно відрізнятися, і для таких сеансів навігації іоносферні похибки визначення координат можна приблизно оцінити як: x, y, z = 2 R 1, де R 1 іоносферних похибка псевдодальності до зенітного НКА в денний час.
Якщо наземний об'єкт рівновіддалений від трьох орбітальних кілець, то в сеансі навігації немає околозенітная НКА, і "високі" НКА мають кути піднесення 1 = 41 ... 45. Іоносферні похибки визначення координат наземного об'єкта в такому сеансі навігації будуть не більше, ніж в сеансі, в якому є околозенітная НКА.
Таким чином, в сеансах навігації наземних об'єктів при використанні шестиканальної однодіапазонні НАП максимальні іоносферні похибки визначення координат об'єкту можна оцінити таким чином:
x, y = (1 ... 2) R 1; z = (2 ... 4) R 1,
де R 1 іоносферних похибка при вертикальному радіопромені в денний час.
В найгірший сезон (зимовий день) в роки максимальної сонячної активності R 1 = 15 м. Отже, максимальні іоносферні похибки визначення місцеположення наземного об'єкта складуть
p = [( x) 2 + ( y) 2] 1/2 = 21 ... 42 м; z = 30 ... 60 м.
Наведемо отримані оцінки максимальних сумарних (інструментальних і іоносферних) похибок глобальної навігації в СРНС ГЛОНАСС при використанні вузькосмугових навігаційних радіосигналів 1600 МГц в шестиканальної НАП на динамічних (T 0 = 1с) наземних об'єктах в роки максимальної сонячної активності:
У роки мінімальної сонячної активності іоносферні похибки будуть в 5 ... 6 разів менше, і відповідно максимальні сумарні похибки глобальної навігації наземних рухомих об'єктів складуть:
супутник ГЛОНАСС
Супутник ГЛОНАСС конструктивно складається з циліндричного гермоконтейнера з приладовим блоком, рами антенно-фідерних пристроїв, приладів системи орієнтації, панелей сонячних батарейз приводами, блоку рухової установки і жалюзі системи терморегулювання з приводами. На супутнику також встановлені оптичні уголковие відбивачі, призначені для калібрування радіосигналів вимірювальної системи за допомогою вимірювань дальності до супутника в оптичному діапазоні, а також для уточнення геодинамічних параметрів моделі руху супутника. Конструктивно кутові відбивачі формуються у вигляді блоку, постійно відстежує напрям на центр Землі. Площа уголкових відбивачів-0,25м2.
До складу бортової апаратури входять:
· Навігаційний комплекс;
· Комплекс управління;
· Система орієнтації і стабілізації;
· Система корекції;
· Система терморегулювання;
· Система електропостачання.
Навігаційний комплекс забезпечує функціонування супутника як елемента системи ГЛОНАСС. До складу комплексу входять: синхронізатор, формувач навігаційних радіосигналів, бортовий комп'ютер, приймач навігаційної інформації і передавач навігаційних радіосигналів.
Синхронізатор забезпечує видачу високостабільних сінхрочастот на бортову апаратуру, формування, зберігання, корекцію і видачу бортовий шкали часу.
Пристрій для формування навігаційних радіосигналів забезпечує формування псевдовипадкових фазоманіпулірованних навігаційних радіосигналів містять далекомірний код і навігаційне повідомлення.
Комплекс управління забезпечує управління системами супутника і контролює правильність їх функціонування. До складу комплексу входять: командно-вимірювальна система, блок управління бортовою апаратурою і система телеметричного контролю.
Командно-вимірювальна система забезпечує вимір дальності в запитному режимі, контроль бортовий шкали часу, управління системою за разовими командам і тимчасовим програмам, запис навігаційної інформації в бортовий навігаційний комплекс і передачу телеметрії.
Блок управління забезпечує розподіл харчування на системи й прилади супутника, логічну обробку, розмноження і посилення разових команд.
Система орієнтації і стабілізації забезпечує заспокоєння супутника після відділення від ракети-носія, початкову орієнтацію сонячних батарей на Сонце і поздовжньої осі супутника на Землю, потім орієнтацію поздовжньої осі супутника на центр Землі і націлювання сонячних батарей на Сонце, а також стабілізацію супутника в процесі корекції орбіти . В системі використовуються прилад на основі інфрачервоного побудови місцевої вертикалі (для орієнтації на центр Землі) і прилад для орієнтації на Сонце. Похибка орієнтації на центр Землі не гірше 3град., А відхилення нормалі до поверхні сонячної батареї від напрямку на Сонце - не більше 5град. Для мінімізації обурень на рух центру мас супутника розвантаження двигунів маховиків проводиться за допомогою муздрамтеатру. В якості виконавчого органу при здійсненні заспокоєння і стабілізації супутника під час видачі імпульсу корекції використовується рухова установка.
Режим заспокоєння, в результаті якого відбувається гасіння кутових швидкостей, включається в зоні радиовидимости.
У режимі початкової орієнтації на Сонце здійснюється розворот супутника щодо поздовжньої осі за допомогою керуючих двигунів-маховиків до появи Сонця в поле зору приладу орієнтації на Сонце, який встановлений на панелі сонячних батарей.
Режим орієнтації на Землю починається з положення орієнтації на Сонце шляхом розвороту супутника за допомогою двигунів-маховиків уздовж осі, орієнтованої на Сонце, до появи Землі в поле зору приладу орієнтації на центр Землі. У штатному режимі забезпечується орієнтація осі супутника разом з антенами на центр Землі за допомогою керуючих двигунів-маховиків за сигналами з приладів орієнтації на центр Землі, орієнтація сонячних батарей на Сонце шляхом розвороту супутника разом сонячними батареями за допомогою керуючого двигуна-маховика по одному каналу і розворотів панелей батарей щодо корпусу супутника за допомогою приводу обертання сонячних батарей по іншому каналу за сигналами приладів орієнтації на Сонце.
У режимі орієнтації перед проведенням корекції і стабілізації супутника під час видачі імпульсу корекції відстеження орієнтації на Сонце не проводиться.
Система корекції забезпечує приведення супутника в задане положення в площині орбіти і його утримання в даних межах по аргументу широти. Система включає рухову установку і блок управління їй. Рухова установка складається з 24 двигунів орієнтації з тягою 10 г і двох двигунів корекції з тягою 500 м
Система терморегулювання забезпечує необхідний тепловий режим супутника. Регулювання тепла, що відводиться з гермоконтейнера, здійснюється жалюзі, які відкривають або закривають радіаційну поверхню в залежності від температури газу. Відведення тепла від приладів здійснюється циркулюючим газом за допомогою вентилятора.
Система електропостачання включає сонячні батареї, акумуляторні батареї, блок автоматики і стабілізації напруги. Початкова потужність сонячних батарей - 1600 Вт, площа - 17,5 м2.
При проходженні супутником тіньових ділянок Землі і Місяця харчування бортових систем здійснюється за рахунок акумуляторних батарей. Їх розрядна ємність становить 70 ампер-годин.
Для забезпечення надійності на супутнику встановлюються по два або по три комплекти основних бортових систем.
Таким чином, на супутник ГЛОНАСС покладено виконання таких функцій:
· Випромінювання високостабільних радіонавігаційних сигналів;
· Прийом, зберігання і передача цифрової навігаційної інформації;
· Формування, оцифровка і передача сигналів точного часу;
· Ретрансляція або випромінювання сигналів для проведення траєкторних вимірювань для контролю орбіти і визначення поправок до бортової шкалою часу;
· Прийом і обробка разових команд;
· Прийом, запам'ятовування і виконання тимчасових програм управління режимами функціонування супутника на орбіті;
· Формування телеметричної інформації про стан бортової апаратури і передача її для обробки і аналізу наземного комплексу управління;
· Прийом і виконання кодів / команд корекції і фазирования бортовий шкали часу;
· Формування і передача "ознаки несправності" при виході Вижній контрольованих параметрів за межі норми.
Управління супутниками ГЛОНАСС здійснюється в автоматизованому режимі.
Виведення супутників ГЛОНАСС на орбіту здійснюється носієм важкого класу "Протон" з розгінним блоком з космодрому Байконур. Носій одночасно виводить три супутника ГЛОНАСС.
Схема виведення включає:
· Виведення космічної головної частини на проміжну кругову орбіту з висотою ~ 200 км;
· Перехід на еліптичну орбіту з перигеем ~ 200 км, апогеєм ~ 19100 км і нахилом 64,3град.
Переклад кожного супутника в задану точку орбітальної площині проводиться за допомогою супутникової рухової установки.
Точність приведення в робочу точку орбіти:
· По періоду обертання - 0,5 с;
· По аргументу широти - 1град .;
· По ексцентриситету - ~ 0,01;
· По нахиленню орбіти - ~ 0,3град.
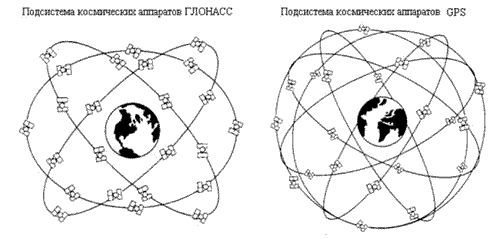
Космічний сегмент систем ГЛОНАСС і GPS
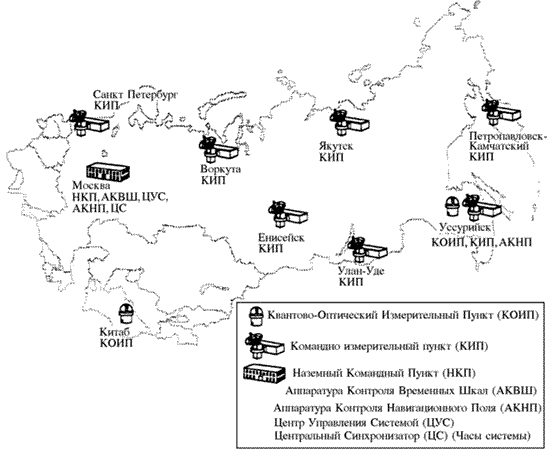
Структура навігаційних радіосигналів системи GPS
В системі GPS використовується кодове розділення сигналів (СDMA), тому всі супутники випромінюють сигнали з однаковою частотою. Кожен супутник системи GPS випромінює два фазоманіпулірованних сигналу. Частота першого сигналу становить L1 = 1575,42 МГц, а другого - L2 = 1227,6 МГц. Сигнал несучої частоти L1 модулюється двома двійковими послідовностями, кожна з яких утворена шляхом підсумовування по модулю 2 далекомірного коду і переданих системних і навігаційних даних, що формуються зі швидкістю 50 біт / с. На частоті L1 передаються дві квадратурні компоненти, біфазної маніпульовані двійковими послідовностями. Перша послідовність є сумою по модулю 2 точного далекомірного коду Р або засекреченого коду Y і навігаційних даних. Друга послідовність також є сумою по модулю 2 грубого З / A (відкритого) коду і тій же послідовності навігаційних даних.
Радіосигнал на частоті L2 біфазної маніпулювати тільки однієї з двох раніше розглянутих послідовностей. Вибір модулирующей послідовності здійснюється по команді з Землі.
Кожен супутник використовує властиві тільки йому дальномірні коди С / A і Р (Y), що і дозволяє розділяти супутникові сигнали. У процесі формування точного далекомірного Р (Y) коду одночасно формуються мітки часу супутникового сигналу.
Склад і структура навігаційних повідомлень супутників системи GPS
Структурний розподіл навігаційної інформації супутників системи GPS здійснюється на Суперкадр, кадри, підкадрів і слова. Суперкадр утворюється з 25 кадрів і займає 750 с (12,5 хв). Один кадр передається протягом 30 с і має розмірі 1500 біт. Кадр розділений на 5 підкадрів по 300 біт і передається протягом інтервалу 6 с. Початок кожного підкадрів позначає мітку часу, відповідну початку / закінчення чергового 6-з інтервалу системного часу GPS. Підкадрів складається з 10 30-біт слів. У кожному слові 6 молодших розрядів є перевірочними бітами.
В 1-, 2- і 3-м підкадрів передаються дані про параметри корекції годин і дані ефемерид КА, з яким встановлено зв'язок. Зміст і структура цих підкадрів залишаються незмінними на всіх сторінках суперкадра. У 4- і 5-м підкадрів міститься інформація про конфігурацію та стан всіх КА системи, альманахи КА, спеціальні повідомлення, параметри, що описують зв'язок часу GPS з UTC, та інше.
Алгоритми прийому та вимірювання параметрів супутникових радіонавігаційних сигналів
До сегменту споживачів систем GPS і ГЛОНАСС відносяться приймачі сигналів супутників. За вимірами параметрів цих сигналів вирішується навігаційна завдання. Приймач можна розділити на три функціональні частини:
 радіочастотну частина;
радіочастотну частина;
цифровий ~ коррелятор;
процесор.
З виходу антенно-фідерного пристрою (антени) сигнал надходить на радіочастотну частина Основне завдання цієї частини полягає в посиленні вхідного сигналу, фільтрації, перетворенні частоти і аналого-цифровому перетворенні. Крім цього, з радіочастотної частини приймача надходить тактова частота для цифрової частини приймача. З виходу радіочастотної частини цифрові відліки вхідного сигналу надходять на вхід цифрового коррелятора.
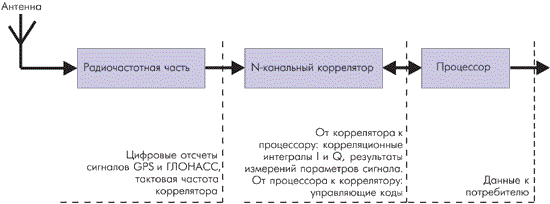
Узагальнена структура приймача
У коррелятора спектр сигналу переноситься на "нульову" частоту. Це проводиться шляхом перемноження вхідного сигналу коррелятора з опорним гармонійним коливанням в синфазном і квадратурного каналах. Далі результат перемноження проходить кореляційну обробку шляхом перемноження з опорним далекомірним кодом і накопиченням на періоді далекомірного коду. У підсумку отримуємо кореляційні інтеграли I і Q. відліку кореляційних інтегралів надходять в процесор для подальшої обробки і замикання петель ФАП (фазова автопідстроювання) і ССЗ (схема стеження за затримкою). Вимірювання параметрів сигналу в приймачі проводяться не безпосередньо по вхідному сигналу, а по його точної копії, що формується системами ФАП і ССЗ. Кореляційні інтеграли I і Q дозволяють оцінити ступінь "схожості" (коррелированности) опорного і вхідного сигналів. Завдання коррелятора, крім формування інтегралів I і Q, - формувати опорний сигнал, згідно з керуючими впливами (кодами управління), які надходять з процесора. Крім того, в деяких приймачах коррелятор формує необхідні вимірювання опорних сигналів і передає їх в процесор для подальшої обробки. У той же час, так як опорні сигнали в коррелятора формуються по керуючим кодами, що надходять з процесора, то необхідні вимірювання опорних сигналів можна проводити безпосередньо в процесорі, обробляючи відповідним чином керуючі коди, що і робиться в багатьох сучасних приймачах.
Які параметри сигналу вимірює коррелятор (процесор)?
Дальність при радіотехнічних вимірах характеризується часом поширення сигналу від об'єкта вимірювання до вимірювального пункту. У навігаційних системах GPS / ГЛОНАСС випромінювання сигналів синхронізовано зі шкалою часу системи, точніше, зі шкалою часу супутника, що випромінює даний сигнал. У той же час, споживач має інформацію про розбіжність шкали часу супутника і системи. Цифрова інформація, передана із супутника, дозволяє встановити момент випромінювання деякого фрагмента сигналу (мітки часу) супутником в системному часу. Момент прийому цього фрагмента визначається за шкалою часу приймача. Шкала часу приймача (споживача) формується за допомогою кварцових стандартів частоти, тому спостерігається постійний "догляд" шкали часу приймача щодо шкали часу системи. Різниця між моментом прийому фрагмента сигналу, відрахувавши за шкалою часу приймача, і моментом випромінювання його супутником, відрахувавши за шкалою супутника, помножена на швидкість світла, називається псевдодальністю. Чому псевдодальністю? Тому що вона відрізняється від істинної дальності на величину, що дорівнює добутку ско-рости світла на "догляд" шкали часу приймача щодо шкали часу системи. При вирішенні навігаційної задачі цей параметр визначається нарівні з координатами споживача (приймача).
Кореляційні інтеграли, що формуються в коррелятора, дозволяють відстежити модуляцію сигналу супутника символами інформації і обчислити мітку часу у вхідному сигналі. Мітки часу слідують з періодичністю 6 с для GPS і 2 с для ГЛОНАСС і утворюють своєрідну 6 (2) -секундную шкалу. В межах одного поділу цієї шкали періоди далекомірного коду утворюють 1-мс шкалу. Одна мілісекунда розділена, в свою чергу, на окремі елементи (chips, в термінології GPS): для GPS - 1023, для ГЛОНАСС - 511. Таким чином, елементи далекомірного коду дозволяють визначити дальність до супутника з похибкою »300 м. Для більш точного визначення необхідно знати фазу генератора далекомірного коду. Схеми побудови опорних генераторів коррелятора дозволяють визначати його фазу з точністю до 0,01 періоду, що становить точність визначення псевдо 3 м.
На підставі вимірів параметрів опорного гармонійного коливання, що формується системою ФАП, визначають частоту і фазу несучого коливання супутника. Його відхід щодо номінального значення дасть доплеровское зміщення частоти, за яким оцінюється швидкість споживача щодо супутника. Крім того, фазові вимірювання несучої дозволяють уточнити дальність до супутника з похибкою в кілька мм.
Для визначення координат споживача необхідно знати координати супутників (не менше 4) і дальність від споживача до кожного видимого супутника. Для того, щоб споживач міг визначити координати супутників, які випромінює ними навігаційні сигнали моделюються повідомленнями про параметри їх руху. В апаратурі споживача відбувається виділення цих повідомлень і визначення координат супутників на потрібний момент часу.
Координати і складові вектора швидкості змінюються дуже швидко, тому повідомлення про параметри руху супутників містять відомості не про їх координатах і складових вектора швидкості, а інформацію про параметрах деякої моделі, апроксимуючої траєкторію руху КА на досить великому інтервалі часу (близько 30 хвилин). Параметри апроксимуючої моделі змінюються досить повільно, і їх можна вважати постійними на інтервалі апроксимації.
Параметри апроксимуючої мо-діли входять до складу навігаційних повідомлень супутників. В системі GPS використовується кеплерівської модель руху з оскулюючих елементами. У цьому випадку траєкторія польоту КА розбивається на ділянки апроксимації тривалістю в одну годину. У центрі кожної ділянки задається вузловий момент часу, значення якого повідомляється споживачеві навігаційної інформації. Крім цього, споживачеві повідомляють параметри моделі оскулюючих елементів на вузловий момент часу, а також параметри функцій, що апроксимують зміни параметрів моделі оскулюючих елементів в часі як попередньому вузловому елементу, так і наступному за ним.
В апаратурі споживача виділяється інтервал часу між моментом часу, на який потрібно визначити положення супутника, і вузловим моментом. Потім за допомогою апроксимуючих функцій та їх параметрів, виділених з навігаційного повідомлення, обчислюються значення параметрів моделі оскулюючих елементів на потрібний момент часу. На останньому етапі за допомогою звичайних формул кеплеровской моделі визначають координати і складові вектора швидкості супутника.
В системі Глонасс для визначення точного положення супутника використовуються диференціальні моделі руху. У цих моделях координати і складові вектора швидкості супутника визначаються чисельним інтеграцією диференціальних рівнянь руху КА, що враховують кінцеве число сил, що діють на КА. Початкові умови інтегрування задаються на вузловий момент часу, що розташовується посередині інтервалу апроксимації.
Як було сказано вище, для визначення координат споживача необхідно знати координати супутників (не менше 4) і дальність від споживача до кожного видимого супутника, яка визначається в навігаційному приймачі з точністю близько 1 м. Для зручності розглянемо найпростіший "плоский" випадок, представлений на рис . 8.
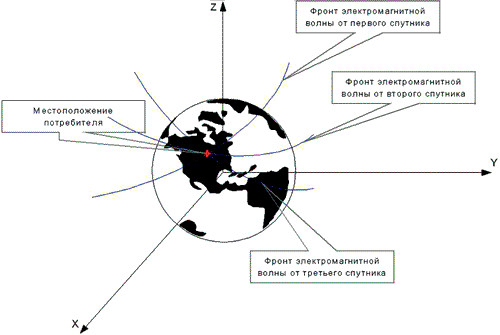
Визначення координат споживача
Кожен супутник можна уявити у вигляді точкового випромінювача. В цьому випадку фронт електромагнітної хвилі буде сферичним. Точкою перетину двох сфер буде та, в якій знаходиться споживач.
Висота орбіт супутників становить порядок 20000 км. Отже, другу точку перетину кіл можна відкинути через апріорних відомостей, так як вона знаходиться далеко в космосі.
Диференціальний режим
Супутникові навігаційні системи дозволяють споживачеві отримати координати з точністю близько 10-15 м. Однак для багатьох завдань, особливо для навігації в містах, потрібна велика точність. Один з основних методів підвищення точності визначення місцезнаходження об'єкта заснований на застосуванні відомого в радіонавігації принципу диференціальних навігаційних вимірювань.
Диференціальний режим DGPS (Differential GPS) дозволяє встановити координати з точністю до 3 м в динамічної навігаційної обстановці і до 1 м - в стаціонарних умовах. Диференціальний режим реалізується за допомогою контрольного GPS-приймача, званого опорної станцією. Вона розташовується в пункті з відомими координатами, в тому ж районі, що і основний GPS-приймач. Порівнюючи відомі координати (отримані в результаті прецизійної геодезичної зйомки) з виміряними, опорна станція обчислює поправки, які передаються споживачам по радіоканалу в заздалегідь обумовленому форматі.
Апаратура споживача приймає від опорної станції диференціальні поправки і враховує їх при визначенні місцезнаходження споживача.
Результати, отримані за допомогою диференціального методу, в значній мірі залежать від відстані між об'єктом і опорної станцією. Застосування цього методу найбільш ефективно, коли переважаючими є систематичні помилки, обумовлені зовнішніми (по відношенню до приймача) причинами. За експериментальними даними, опорну станцію рекомендується розташовувати не далі 500 км від об'єкту.
В даний час існують безліч широкозонних, регіональних і локальних диференціальних систем.
Як широкозонних варто відзначити такі системи, як американська WAAS, європейська EGNOS і японська MSAS. Ці системи використовують геостаціонарні супутники для передачі поправок всім споживачам, що знаходяться в зоні їх покриття.
Регіональні системи призначені для навігаційного забезпечення окремих ділянок земної поверхні. Зазвичай регіональні системи використовують у великих містах, на транспортних магістралях і судноплавних річках, в портах і по березі морів і океанів. Діаметр робочої зони регіональної системизазвичай становить від 500 до 2000 км. Вона може мати в своєму складі одну або кілька опорних станцій.
Локальні системи мають максимальний радіус дії від 50 до 220 км. Вони включають зазвичай одну базову станцію. Локальні системи зазвичай поділяють за способом їх застосування: морські, авіаційні та геодезичні локальні диференціальні станції.
Розвиток супутникової навігації
Загальний напрямок модернізації обох супутникових систем GPS і ГЛОНАСС пов'язано з підвищенням точності навігаційних визначень, поліпшенням сервісу, що надається користувачам, підвищенням терміну служби і надійністю бортової апаратури супутників, поліпшенням сумісності з іншими радіотехнічними системами і розвитком диференціальних підсистем. Загальний напрямок розвитку систем GPS і ГЛОНАСС збігається, але динаміка і досягнуті результати сильно відрізняються.
Удосконалення системи ГЛОНАСС планується здійснювати на базі супутників нового покоління "ГЛОНАСС-М". Цей супутник буде володіти збільшеним ресурсом служби і стане випромінювати навігаційний сигнал в діапазоні L2 для цивільних застосувань.
Аналогічне рішення було прийнято в США, де 5 січня 1999 року проголошено про виділення 400 млн. Дол. На модернізацію системи GPS, пов'язану з передачею C / A-коду на частоті L2 (1222,7 МГц) і введенням третьої несучої L3 (1176, 45 МГц) на КА, які будуть запускатися з 2005 року. Сигнал на частоті L2 намічено використати для цивільних потреб, не пов'язаних безпосередньо з небезпекою для життя людей. Пропонується почати реалізацію цього рішення з 2003 року. Третій цивільний сигнал на частоті L3 вирішено використовувати для потреб цивільної авіації.
Список скорочень
АКНП - апаратура контролю навігаційного поля
АКС - бортова апаратура командної системи
АСЧ - атомні стандарти частоти
БІС - беззапитним вимірювальна станція
БВК - бортовий обчислювальний комплекс
БНП - бортовий навігаційний передавач
БТС - бортова телеметрична система
БУ - блок управління
БУК - бортовий керуючий комплекс
БХ - бортовий хронізатора
БЦ - балістичний центр
БШВ - бортова ШВ
ГВМ - габаритно-ваговий макет
СРНС - супутникова радіонавігаційна система
ДН - діаграма спрямованості
ЄС КВО - Єдина глобальна системакоординатно-часового забезпечення
ЗИС - запитна вимірювальна станція
ЗРВ - зона радиовидимости
КА - космічний апарат
КІС - командно-вимірювальна станція
КОС - кванто-оптичні станції
КС - контрольні станції
ЛДПС - локальна диференціальна підсистема
МБР - міжконтинентальна балістична ракета
МВ - мітка часу
НАП - навігаційна апаратура споживачів
НКА - навігаційний КА
ПКУ - наземний комплекс управління
НСВТ - навігаційний сгнал високої точності
НССТ - навігаційний сигнал середньої точності
ОГ - орбітальне угруповання
ПСП - псевдослучайная послідовність
ПКУ - підсистеми контролю та управління
РВСН - ракетні війська стратегічного призначення
СК - система корекції
СКФ - система контролю фаз
СО - система орієнтації і стабілізації
СК - система корекції
СЕП - система електроживлення
ФМ - фазова маніпуляція
Чво - частотно-часове забезпечення
ЧВП - частотно-тимчасова поправка
ЦІ - цифрова інформація
ЦС-центральний синхронізатор
ЦУС - центр управління системою ГЛОНАСС
ШВ - шкала часу
ЕІ - ефемеридна інформація
ЕО -ефемерідное забезпечення
UTC - координований всесвітній час
Використовувана література
1. Радіотехнічні системи. Під ред. Казарінова Ю.М. М .: Вища школа, 1990..
2. Соловйов Ю.А. Системи супутникової навігації. М .: Еко-Трендз, 2000..
3. Глобальна супутникова радіонавігаційна система ГЛОНАСС / Под ред. В.Н. Харисова, А.І. Перова, В.А. Болдіна. М .: ІПРЖР, 1998..
4. Липкин І.А. Супутникові навігаційні системи. М .: Вузівська книга, 2001..
5. Глобальна навігаційна супутникова система ГЛОНАСС. Інтерфейсний контрольний документ. М .: кницами ВКС, 1995.