Глобальна навігаційна супутникова система ГНС. Глобальна навігаційна супутникова система (Глонасс)
Є. Поваляєв, С. Хуторний
Системи супутникової навігаціїГЛОНАСС та GPS.
Пропонуємо до Вашої уваги статтю, присвячену супутниковим радіонавігаційним системам Глонасс (глобальна навігаційна супутникова система) та GPS (Global Positioning System). У статті розглянуті питання побудови та функціонування систем, структура та функції апаратури споживача (приймачів), алгоритми вирішення навігаційного завдання та перспективи розвитку систем.
Навпаки, Галілей має бути цивільним. Проект перебуватиме у Празі. Проект названо на честь тосканського вченого Галілео Галілея, який також цікавився проблемами морського судноплавства. Однак із цієї фінансової моделі інвестори відмовилися від надто великого ризику.
Базовий сервіс – базовий сигнал надається безкоштовно. Ця послуга буде розроблена для найважливіших транспортних спільнот, таких як авіація. Він буде сертифікований відповідно до Міжнародних стандартів Міжнародної організації цивільної авіації та Правил відкритого неба. Комерційне обслуговування – на відміну від базової служби, використовує ще два сигнали. Доступ контролюється на рівні приймача, де використовується ключ доступу. Послуга призначена лише для користувачів, визначених урядом.
З давніх-давен мандрівники задавалися питанням: як визначити своє місцезнаходження на Землі? Давні мореплавці орієнтувалися по зірках, що вказують напрямок руху: знаючи середню швидкість і час у дорозі, можна було зорієнтуватися в просторі і визначити відстань до кінцевого пункту призначення. Однак погодні умови не завжди були на руку дослідникам, тому збитися з курсу не мало особливих труднощів. З появою компасу завдання суттєво спростилося. Мандрівник уже меншою мірою залежав від погоди.
Крім того, він має забезпечити можливість виклику екстреної допомоги. Кожна з площин буде 56° із площиною екватора, що спростить навігацію за навігаційною системою до 75° широти. Велика кількість супутників, три з яких виконуватимуть резервне копіювання, забезпечать надійну роботу системи, навіть якщо деякі супутники перестануть працювати належним чином.
Фактично, супутниковий сигнал не просто зникає між будинками, у замкнутих просторах, у лісі, під землею чи під морем – це було б першим, що вийшло б з нашого життя перед серйозною міжнародною кризою. Від дирижаблів до атомних підводних човнів.
Ера радіо відкрила нові можливості перед людиною. З появою станцій радіолокації, коли стало можливим вимірювати параметри руху і відносне місце об'єкта по відбитому від його поверхні променю радіолокатора, постало питання про можливість вимірювання параметрів руху об'єкта по сигналу, що випромінюється. У 1957 року у СРСР група вчених під керівництвом В.А. Котельникова експериментально підтвердила можливість визначення параметрів руху штучного супутника Землі (ІСЗ) за результатами вимірювань доплерівського зсуву частоти сигналу, що випромінюється цим супутником. Але, що найголовніше, була встановлена можливість вирішення зворотного завдання - знаходження координат приймача по виміряному доплерівському зсуву сигналу, що випромінюється з ШСЗ, якщо параметри руху та координати цього супутника відомі. При русі орбітою супутник випромінює сигнал певної частоти, номінал якої відомий на приймальній стороні (споживач). Положення ШСЗ у кожний момент часу відомо, точніше, його можна обчислити на підставі інформації, закладеної у сигналі супутника. Користувач, вимірюючи частоту сигналу, що прийшов до нього, порівнює еeс еталонною і таким чином обчислює доплерівський зсув частоти, обумовлений рухом супутника. Вимірювання проводяться безперервно, що дозволяє скласти своєрідну функцію зміни частоти Доплера. У певний момент часу частота дорівнює нулю, а потім змінює знак. У час рівності нулю частоти Доплера споживач перебуває в лінії, що є нормаллю до вектора руху супутника. Використовуючи залежність крутості кривої доплерівської частоти від відстані між споживачем та ШСЗ та вимірявши момент часу, коли частота Доплера дорівнює нулю, можна обчислити координати споживача.
Історія навігаційних системстарше, ніж здається: вони народилися Першої світової війни потреб командирів німецьких дирижаблів, бомбардують темні ночі Англії. У цей час дві станції, віддалені один від одного, транслювали сигнал, з якого передача одного показала напрямок, а другий сигнал перетнув перший на певному куті вище цільового розташування.
Точність систем навігації. Проблема інерційної навігації полягає в тому, що її точність швидко знижується з часом, що минув від відмови супутникового сигналу. Поступово він був покращений, і він почав зникати з появою супутників. Нещодавно він був зацікавлений у ньому – особливо у контексті ризиків безпеки. Однак наземні радіосистеми не надто точні і для охоплення великих площ потрібна велика кількість передавачів і щогли. Тому вони є дорогими та, більш того, відносно вразливими.
Таким чином, штучний супутникЗемлі стає радіонавігаційною опорною станцією, координати якої змінюються у часі внаслідок руху супутника орбітою, але заздалегідь можуть бути обчислені для будь-якого моменту часу завдяки ефемеридної інформації, закладеної в навігаційному сигналі супутника.
У 1958-1959 рр. у Ленінградській військово-повітряній інженерній академії (ЛВВІА) ім. А.Ф. Можайського, Інституті теоретичної астрономії АН СРСР, Інституті електромеханіки АН СРСР, двох морських НДІ та Горьківському НДРФД проводилися дослідження на тему "Супутник", які згодом стали основою для побудови першої вітчизняної низькоорбітальної навігаційної супутникової системи "Цікада". І 1963 року розпочалися роботи з побудови цієї системи. 1967 року на орбіту було виведено першого вітчизняного навігаційного супутника "Космос-192". Характерною рисою радіонавігаційних супутникових систем першого покоління є застосування низькоорбітальних ШСЗ та використання для вимірювання навігаційних параметрів об'єкта одного сигналу, видимого в даний момент супутника. Надалі супутники системи "Цікада" були обладнані приймальною апаратурою виявлення об'єктів, що зазнають лиха.
Це пристрій з дуже точним годинником і набором акселерометрів та гіроскопів. Він працює, зберігаючи останнє відоме точне положення, визначене інакше, з якого акселерометри часу вимірюють швидкість і гіроскопи в напрямку руху. Тому пристрої, що працюють з потужним комп'ютером, можуть спілкуватися будь-коли незалежно від зовнішніх джерел сигналу.
Інерційні навігаційні системи стали застосовуватися переважно на атомних підводних човнах протягом минулого століття. Вони були складними, великими, тривожними та не дуже точними. Основним недоліком цих систем було те, що помилки та відхилення поступово накопичувалися і без частих поправок результати стали непридатними після деякого часу.
Паралельно з цим після успішного запуску СРСР першого штучного супутника землі в США в Лабораторії прикладної фізики Університету Джона Гопкінса проводяться роботи, пов'язані з можливістю вимірювання параметрів сигналу, що випромінюється супутником. За вимірами обчислюються параметри руху супутника щодо наземного пункту спостереження. Рішення зворотного завдання – справа часу.
Незалежна карта розмір монет. Пристрій більше не набуває форми великої коробки, що вимагає сильного джерела живлення, а чіпа з розмірами невеликої монети. Він складається із шести шарів, кожен з яких має товщину 50 мікрон, що становить приблизно товщину людського волосся. На цих шарах друкуються схеми, що замінюють колишні великі та ненадійні механічні акселерометри та гіроскопи із споживанням енергії всього 200 мВт.
Метою лабораторій розробки є мініатюризація інерційних систем. Повідомляється, що помилка після щогодинного виміру менша за одну морську милю. Незалежні навігаційні системи повинні також використовувати додаткові джерела інформації про місцезнаходження, такі як магнітне поле Землі, радіомовлення радіо та телевізійних станцій, мобільні мережіі навіть шторми. Деякі джерела також розповідають про спеціальні приховані передавачі ближньої дії, які будуть розгорнуті в зонах інтересів.
На основі цих досліджень у 1964 році у США створюється доплерівська супутникова радіонавігаційна система першого покоління "Transit". Основне її призначення – навігаційне забезпечення пуску з підводних човнів балістичних ракет Поларіс. Батьком системи вважається директор Лабораторії прикладної фізики Р. Кершнер. Для комерційного використання система стає доступною в 1967 р. Так само, як і в системі "Цікада", у системі "Transit" координати джерела обчислюються по доплерівському зсуву частоти сигналу одного з 7 видимих супутників. ШСЗ систем мають кругові полярні орбіти з висотою над поверхнею Землі ~ 1100 км, період обігу супутників "Transit" дорівнює 107 хвилин. Точність обчислення координат джерела у системах першого покоління великою мірою залежить від похибки визначення швидкості джерела. Тож якщо швидкість об'єкта визначено з похибкою 0,5 м, це у свою чергу призведе до помилки визначення координат ~ 500 м. Для нерухомого об'єкта ця величина зменшується до 50 м.
Історія китайської супутникової навігації
Деталі не кажуть, бо першими інерційними системами навігації будуть солдати. Донедавна лише в США та Росії були свої супутникові навігаційні системи. Нещодавно Китай приєднався до цієї групи. Крім того, є багато свідчень, що китайці завершать свою систему швидше, ніж європейці. Ідея створення китайської супутникової навігації народилася роками. Однак реальна робота над системою почалася майже через 20 років. Він складався з чотирьох геостаціонарних супутників. Бейду-1 охоплював регіон Південно-Східної Азії.
Крім того, у цих системах неможливий безперервний режим роботи. Зважаючи на те, що системи низькоорбітні, час, протягом якого супутник знаходиться в полі видимості споживача, не перевищує однієї години. Крім того, час між проходженням різних супутників зони видимості споживача залежить від географічної широти, де він знаходиться, і може становити величину від 35 до 90 хвилин. Зменшення цього інтервалу шляхом нарощування числа супутників неможливе, тому що всі супутники випромінюють сигнали на одній і тій самій частоті.
Наразі всі супутники цієї системи відключені. Було запропоновано навіть фінансову підтримку у розмірі 230 мільйонів євро. Офіційно через незадовільну сторону китайської співпраці. Це буде система із глобальним охопленням. Всі супутникові навігаційні системи, що діють, мають трикомпонентну конструкцію. Китайська система не буде винятком. Тут ми знаходимо космічний сегмент, користувач та управління.
В даний час на орбіті знаходяться 23 супутники, з яких 3 виключені. Супутниковий сигнал передаватиметься на наступних частотах. Це різні типи наземних станцій, завданням яких є забезпечення належного функціонування системи. Найбільш важливими елементами контрольного сегмента.
Отже, супутникові навігаційні системи другого покоління мають низку істотних недоліків. Насамперед - недостатня точність визначення координат динамічних об'єктів. До недоліку можна віднести відсутність безперервності у вимірах.
Однією з основних проблем, що виникають при створенні супутникових систем, що забезпечують навігаційні визначення кількох супутників, є взаємна синхронізація сигналів (шкал часу) супутників з необхідною точністю. Розузгодження опорних генераторів супутників на 10 нс призводить до помилки у визначенні координат споживача 1015 м . Другою проблемою, з якою зіткнулися розробники під час створення високоорбітальних супутникових навігаційних систем, стало високоточне визначення та прогнозування параметрів орбіт ШСЗ. Апаратура приймача, вимірюючи затримки сигналів від різних супутників, обчислює координати споживача.
Головна станція управління – відповідає за підтримку правильного сузір'я супутників. Їхнім завданням є безперервний прийом супутникового сигналу. . Станції, що відправляють китайську навігацію компасом. Китайська супутникова навігація пропонуватиме два рівні точності: загальнодоступні та зашифровані. Кодований сигнал буде призначено для китайської армії. Ймовірно, у майбутньому ця технологія буде розроблена для надсилання довших повідомлень.
Це дозволить вам встановити становище набагато швидше, особливо в міських та гірських районах. За оцінками, китайські компанії зароблять ще 60 мільярдів доларів США у найближчі п'ять років. Супутникова навігація - тип радіонавігації з використанням радіохвиль зі штучних супутників, з метою визначення місцезнаходження точок і приймачів, що рухаються, поряд з параметрами їх переміщення в будь-якому місці на поверхні Землі.
Для цих цілей у 1967 році ВМС США було розроблено програму, за якою було здійснено запуск супутника TIMATION-I, а у 1969 році – супутника TIMATION-II. На борту цих супутників використовувалися кварцові генератори. У той же час ВПС США паралельно вели свою програму з використання широкосмугових сигналів, модульованих псевдошумовим кодом (PRN). Кореляційні властивості такого коду дозволяють використовувати одну частоту сигналу всім супутників, з кодовим поділом сигналів від різних супутників. Пізніше, в 1973 році, дві програми були об'єднані в одну спільну під назвою "Navstar-GPS". До 1996 року розгортання системи було завершено. У даний моментдоступно 28 активних супутників.
Типи супутникових навігаційних систем
У морському, автомобільному, повітряному та залізничному транспорті супутникова навігація використовується для автоматичної ідентифікації рухомих об'єктів, контролю їх маршрутів та попередження про потенційні небезпеки. Обидві системи працюють за принципом пасивного виміру відстані між приймачем та супутниками. Метод вимірювання та робота системи аналогічні.
Система складається із 30 супутників, розташованих на трьох кругових орбітах. У Європі буде створено два центри для контролю роботи супутників. Комерційним клієнтам буде надано топографічну зйомку з точністю до 10 метрів і швидкістю з точністю до 0, 2 метрів за секунду. Ми бачимо, як це працює на схемі, підготовленій виробником. У населених пунктах супутниковий сигнал добирається до приймача як безпосередньо, і від відображень - у різний час. Якщо сигнали накладаються, створюється міхур сигналу.
У СРСР льотні випробування високоорбітальної супутникової навігаційної системи Глонасс почалися 1982 року запуском супутника "Космос-1413". Основним розробником і творцем за системою в цілому та за космічним сегментом є НУО прикладної механіки (м. Красноярськ), а за навігаційними космічними апаратами - ПО "Політ" (м. Омськ). Головним розробником радіотехнічних комплексів є РНДІКП; відповідальним за створення тимчасового комплексу, системи синхронізації та навігаційної апаратури споживачів визначено Російський інститут радіонавігації та часу.
Приймач шукає свій пік для визначення фактичного моменту прийому сигналу - але чим більше бульбашка безформна, тим важче отримати точне зчитування, тому точність розрахункового положення буде меншою. Тому приймач може ігнорувати всі сигнали після першого прийому на даний одиницю часу, з ймовірністю визнаючи, що він отримав прямий сигнал. Чому такі рішення лише зараз? Всупереч зовнішньому виглядуЙдеться не про прогрес у галузі напівпровідників, але це також важливо. Фактично лише цього року ми отримали достатню кількість з них для застосування в таких умовах.
Мережева радіонавігаційна супутникова система (СРНСС) Глонасс
Система Глонасс варта глобальної оперативної навігації приземних рухомих об'єктів. СРНСС розроблено на замовлення Міністерства Оборони. За своєю структурою Глонасс так само, як і GPS, вважається системою подвійної дії, тобто може використовуватися як у військових, так і цивільних цілях.
Раніше все, що їм потрібно було зробити, це підвищити точність вимірювань для систем, що працюють просто неба, наприклад, у морі або на полях. На додаток до виробників смартфонів та автомобільної навігації нові чіпи, безперечно, будуть оцінені терористами. Можна тільки уявити, як потужна зброя терору керуватиметься з точністю до 30 см автономних безпілотних. літальних апаратів, встановлених на них вибухівкою У деяких випадках краще, ніж розчин, захований у фургоні з висувним дахом.
Це, ймовірно, призведе до поширення рішень, аналогічних тим, що використовуються сьогодні у Москві. Світова система позиціонування. 

Глобальна система позиціонування «Глобальна система позиціонування» - це космічна супутникова навігаційна система, яка надає інформацію про час і місце, незалежно від погоди, в будь-якій точці світу або де є ненав'язлива область огляду чотирьох або більше супутників. Система надає важливі можливості військовим, комерційним та цивільним користувачам по всьому світу.
Система в цілому включає три функціональні частини (у професійній літературі ці частини називаються сегментами) (рис. 1).
Малюнок 1.Сегменти високоорбітальних навігаційних систем Глонасс та GPS
космічний сегмент, до якого входить орбітальне угруповання штучних супутників Землі (іншими словами, навігаційних космічних апаратів);
Радянський Союз запустив перший штучний супутник «Супутник» у двох американських фізиківВільям Гіє і Джордж Вейффенбах з Лабораторії прикладної фізики Джона Хопкінса вирішив контролювати супутникові радіопередачі. Через кілька годин вони зрозуміли, що через ефект Доплера вони можуть вказати місце супутника на орбіті.
Він використав сузір'я з п'яти супутників і міг забезпечувати оновлену позицію приблизно раз на годину. Він став повністю працездатним у Рік отримання, зараховується за його винахід. Його вільний доступ будь-якої людини у світі визнається як право, а не як привілей. В даний час це єдина повністю функціональна система, що складається із сузір'я, що містить 30 супутників.
сегмент управління, наземний комплекс управління (ПКУ) орбітальним угрупуванням космічних апаратів;
апаратура користувачів системи
З цих трьох частин остання, апаратура користувачів, найчисленніша. Система Глонасс є беззапитової, тому кількість споживачів системи не має значення. Крім основної функції - навігаційних визначень - система дозволяє проводити високоточну взаємну синхронізацію стандартів частоти і часу на віддалених наземних об'єктах і взаємну геодезичну прив'язку. Крім того, з її допомогою можна проводити визначення орієнтації об'єкта на основі вимірювань, що виробляються від чотирьох приймачів навігаційних сигналів супутників.
Через швидку еволюцію технологій і все більш складні військові стандарти вона обходиться технічно. Нова система матиме супутники, здатні передавати сигнал у 500 разів потужніший, ніж сучасні супутники, і матимуть значні поліпшення у військових додатках.
Індія представляє реальну загрозу і навіть сприймається як дестабілізуючий чинник у перевазі глобальних систем позиціонування. З бюджетом понад 300 мільйонів доларів він націлений на надання послуг позиціонування із загальним охопленням національної території з використанням мережі з 7 супутників.
У системі Глонасс як радіонавігаційна опорна станція використовуються навігаційні космічні апарати (НКА), що обертаються по круговій геостаціонарній орбіті на висоті ~ 19100 км (рис. 2). Період звернення супутника навколо Землі дорівнює в середньому 11 годин 45 хвилин. Час експлуатації супутника - 5 років, за цей час параметри його орбіти не повинні відрізнятися від номінальних значень більше ніж на 5%. Сам супутник є герметичний контейнер діаметром 1,35 м і довжиною 7,84 м, усередині якого розміщується різного роду апаратура. Живлення всіх систем проводиться від сонячних батарей. Загальна маса супутника – 1415 кг. До складу бортової апаратури входять: бортовий навігаційний передавач, хронізатор (годинник), бортовий керуючий комплекс, система орієнтації та стабілізації тощо.
Малюнок 2.Космічний сегмент систем ГЛОНАСС та GPS
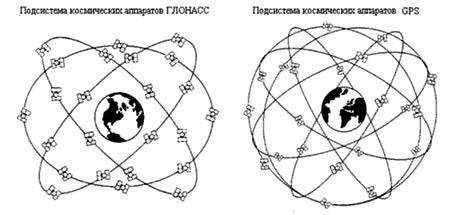
Рисунок 3. Сегмент наземного комплексу управління системи Глонасс
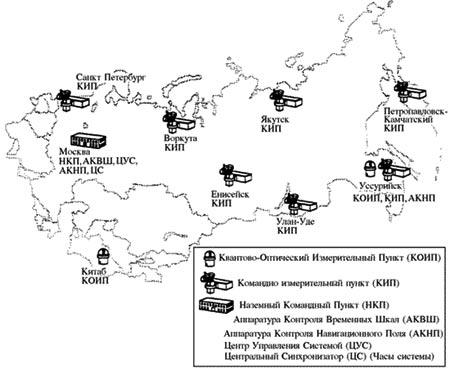
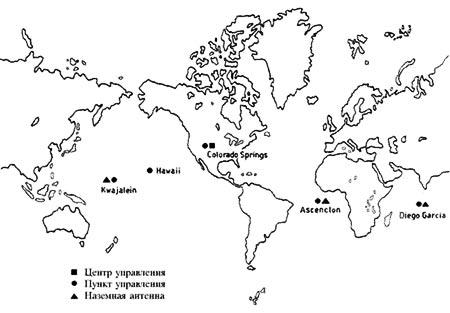
Рисунок 4. Сегмент наземного комплексу управління системи GPS
Сегмент наземного комплексу управління системи ГЛОНАСС виконує такі функції:
ефемеридне та частотно-тимчасове забезпечення;
моніторинг радіонавігаційного поля;
радіотелеметричний моніторинг НКА;
командне та програмне радіоуправління НКА.
Для синхронізації шкал часу різних супутників з необхідною точністю на борту НКА використовують цезієві стандарти частоти з відносною нестабільністю порядку 10-13. На наземному комплексі управління використовується водневий стандарт із відносною нестабільністю 10-14. Крім того, до складу ПКУ входять засоби корекції шкал часу супутників щодо еталонної шкали з похибкою 3√5 нс.
Наземний сегмент забезпечує ефемеридне забезпечення супутників. Це означає, що на землі визначаються параметри руху супутників і прогнозуються значення цих параметрів на певний проміжок часу. Параметри та їх прогноз закладаються в навігаційне повідомлення, яке передається супутником поряд із передачею навігаційного сигналу. Сюди ж входять частотно-часові виправлення бортової шкали часу супутника щодо системного часу. Вимірювання та прогноз параметрів руху НКА проводяться у Балістичному центрі системи за результатами траєкторних вимірювань дальності до супутника та його радіальної швидкості.
Мережева радіонавігаційна супутникова система GPS
Американська система GPS за своїми функціональними можливостями аналогічна вітчизняній системі Глонасс. Її основне призначення - високоточне визначення координат споживача, що становлять вектор швидкості, і прив'язка до системної шкали часу. Аналогічно вітчизняною, система GPS розроблена для Міністерства Оборони США та перебуває під його керуванням. Згідно з інтерфейсним контрольним документом, основними розробниками системи є:
по космічному сегменту – Rockwell International Space Division, Martin Marietta Astro Space Division;
по сегменту управління – IBM, Federal System Company;
по сегменту споживачів – Rockwell International, Collins Avio-nics & Communication Division.
Як і система Глонасс, GPS складається з космічного сегмента, наземного командно-вимірювального комплексу та сегмента споживачів
Як було зазначено вище, орбітальне угруповання GPS складається з 28 навігаційних космічних апаратів. Всі вони знаходяться на кругових орбітах з періодом обігу навколо Землі, що дорівнює 12 годин. Висота орбіти кожного супутника дорівнює ~20000 км. НКА системи GPS проходили низку удосконалень, які позначалися на їх характеристиках загалом. У табл. 1 наведено короткі характеристикикосмічних апаратів, що використовуються в системі.
Таблиця 1. Характеристики космічних апаратів, що використовуються в системі GPS
|
Маса на орбіті |
Потужність енергоджерел, Вт |
Розрахунковий термін активного існування |
Рік запуску першого НКА |
|
Таблиця 2. Порівняльні характеристики систем ГЛОНАСС та GPS
|
Показник | ||
|
Число КА у повній орбітальному угрупованню | ||
|
Число орбітальних площин | ||
|
Число КА у кожній площині | ||
|
Нахилення орбіти | ||
|
Висота орбіти, км | ||
|
Період звернення супутника |
11 год. 15 хв. 44 с |
11 год. 58 хв. 00 с |
|
Система координат | ||
|
Маса навігаційного КА, кг | ||
|
Потужність сонячних батарей, Вт | ||
|
Термін активного існування, років | ||
|
Засоби виведення КА на орбіту |
"Протон-К/ДМ" | |
|
Число КА, що виводиться за один запуск | ||
|
Космодром |
Байконур (Казахстан) |
Мис Канаверел (Cape Canaveral) |
|
Еталонний час | ||
|
Метод доступу | ||
|
Частота, що несе: L1 L2 |
1598,0625-1604,25 7/9 L1 |
1575,42 60/77 L1 |
|
Поляризація |
Правостороння |
Правостороння |
|
Тип псевдошумової послідовності |
m-послідовність |
код Голда |
|
Число елементів коду: C/A P | ||
|
Швидкість кодування, Мбіт/с: C/A P | ||
|
Рівень внутрішньосистемних радіоперешкод, дБ | ||
|
Структура навігаційного повідомлення |
||
|
Швидкість передачі, біт/с | ||
|
Вид модуляції |
BPSK (Манчестер) | |
|
Довжина суперкадра, хв. |
2,5 (5 кадрів) |
12,5 (25 кадрів) |
|
Довжина кадру, з |
30 (15 рядків) |
30 (5 рядків) |
|
Довжина рядка, з | ||
При проектуванні системи загалом та НКА зокрема, велика увага приділяється питанням автономного функціонування. Так, космічні апарати першого покоління (Блок-I) забезпечували нормальну роботу системи (мається на увазі, без суттєвих помилок визначення координат) без втручання сегмента управління протягом 34 днів. У апаратах Блок-II цей термін було збільшено до 14 днів. У нової модифікаціїНКА Блок-IIR дозволяє автономно працювати протягом 180 днів без коригування параметрів орбіти із землі, користуючись лише автономним комплексом взаємної синхронізації супутників. Апарати Блок-IIF передбачається використовувати замість відпрацьованих Блок-IIR.
Структура навігаційних радіосигналів системи Глонасс
У системі Глонасс використовується частотний поділ сигналів (FDMA), що випромінюються кожним супутником - двох фазоманіпульованих сигналів. Частота першого сигналу лежить у діапазоні L1 ~ 1600 МГц, а частота другого - в діапазоні L2 ~ 1250 МГц. Номінальні значення робітників частот радіосигналів, що передаються в діапазонах L1 і L2, визначаються виразом:
f k1 = f 1 + kf 1 f k2 = f 2 + kf 2 k = 0,1,...,24, (1)
де k = 0,1, ..., 24 - номери літерів (каналів) робочих частот супутників;
f 1 = 1602 МГц; f 1 = 9/16 = 0,5625 МГц; f 2 = 1246 МГц; f 2 = 7/16 = 0,4375 МГц.
Для кожного супутника робочі частоти сигналів у діапазоні L1 та L2 когерентні та формуються від одного еталона частоти. Відношення робочих частот несучого кожного супутника:
f k1 /f k2 = 7/9.
Номінальне значення частоти бортового генератора, з погляду спостерігача, що є на Землі, дорівнює 5,0 MГц.
В діапазоні L1 кожен супутник системи Глонасс випромінює 2 несучі на одній і тій же частоті, зрушені один щодо одного по фазі на 90 º (рис. 5).
Малюнок 5.Векторна діаграма несучих сигналів систем ГЛОНАСС та GPS
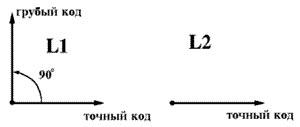
Одна з несучих піддається фазової маніпуляції на 180 º. Модулюючий сигнал отримують додаванням по модулю 2 трьох двійкових сигналів (рис. 6):
грубого далекомірного коду, що передається зі швидкістю 511 Кбіт/с (рис. 6в);
послідовності навігаційних даних, що передаються зі швидкістю 50 біт/с (рис. 6а);
меандрового коливання, що передається зі швидкістю 100 біт/с (рис. 6б).
Малюнок 6.Структура сигналу ГЛОНАСС
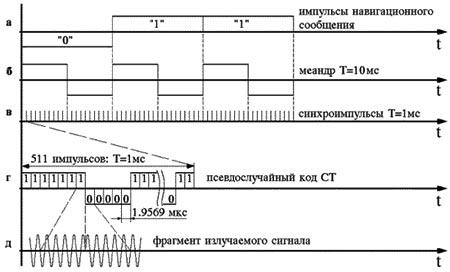
Сигнал в діапазоні L1 (аналогічний C/A-коду GPS) доступний для всіх споживачів в зоні видимості КА. Сигнал у діапазоні L2 призначений для військових потреб і його структура не розкривається.
Склад та структура навігаційних повідомлень супутників системи Глонасс
Навігаційне повідомлення формується як безперервно наступних рядків, кожна тривалістю 2 з. У першій частині рядка (інтервал 1,7 с) передаються навігаційні дані, а у другій (0,3 с) – Мітка Часу. Вона є укороченою псевдовипадковою послідовністю, що складається з 30 символів з тактовою частотою 100 біт/с.
Навігаційні повідомлення супутників системи Глонасс необхідні споживачам для навігаційних визначень та планування сеансів зв'язку із супутниками. За своїм змістом навігаційні повідомлення поділяються на оперативну та неоперативну інформацію.
Оперативна інформація відноситься до супутника, із сигналу якого вона була отримана. До оперативної інформації відносять:
оцифрування міток часу;
відносна відмінність несучої частоти супутника від номінального значення;
ефемеридна інформація.
Час прив'язки ефемеридної інформації та частотно-часові поправки, що мають півгодинну кратність від початку доби, дозволяють точно визначати географічні координати та швидкість руху супутника.
Неоперативна інформація містить альманах, що включає:
дані про стан усіх супутників системи;
зсув шкали часу супутника щодо шкали системи;
параметри орбіт всіх супутників системи;
виправлення до шкали часу системи Глонасс.
Вибір оптимального "сузір'я" КА та прогнозу доплерівського зсуву несучої частоти забезпечується за рахунок аналізу альманаху системи.
Навігаційні повідомлення супутників системи Глонасс структуровані як суперкадрів тривалістю 2,5 хв. Суперкадр складається із п'яти кадрів тривалістю 30 с. Кожен кадр містить 15 рядків тривалістю 2 с. З 2 із тривалості рядка останні 0,3 с займає мітка часу. Решта рядка містить 85 символів цифрової інформації, що передаються із частотою 50 Гц.
У складі кожного кадру передається повний обсяг оперативної інформації та частина альманаху системи. Повний альманах міститься у всьому суперкадрі. При цьому інформація суперкадра, що міститься в рядках 1√4, відноситься до супутника, з якого вона надходить (оперативна частина), і не змінюється в межах суперкадра.
Структура навігаційних радіосигналів системи GPS
У системі GPS використовується кодовий поділ сигналів (СDMA), тому всі супутники випромінюють сигнали з однаковою частотою. Кожен супутник системи GPS випромінює два фазоманіпульовані сигнали. Частота першого сигналу становить L1 = 1575,42 МГц, а другого – L2 = 1227,6 МГц. Сигнал несучої частоти L1 модулюється двома двійковими послідовностями, кожна з яких утворена шляхом підсумовування по модулю 2 далекомірного коду і системних і навігаційних даних, що передаються, формованих зі швидкістю 50 біт/с. На частоті L1 передаються два квадратурні компоненти, біфазно маніпульовані двійковими послідовностями. Перша послідовність є сумою за модулем 2 точного далекомірного коду Р або засекреченого коду Y та навігаційних даних. Друга послідовність також є сумою за модулем 2 грубого С/A (відкритого) коду і тієї ж послідовності даних навігацій.
Радіосигнал на частоті L2 біфазно маніпульований лише однією з двох раніше розглянутих послідовностей. Вибір модулюючої послідовності здійснюється за командою із Землі.
Кожен супутник використовує властиві лише йому далекомірні коди С/A і Р(Y), що дозволяє розділяти супутникові сигнали. У процесі формування точного далекомірного Р(Y) коду одночасно формуються мітки часу супутникового сигналу.
Склад та структура навігаційних повідомлень супутників системи GPS
Структурний поділ навігаційної інформації супутників системи GPS здійснюється на суперкадри, кадри, підкадри та слова. Суперкадр утворюється з 25 кадрів та займає 750 с (12,5 хв). Один кадр передається протягом 30 с та має розмір 1500 біт. Кадр поділено на 5 підкадрів по 300 біт і передається протягом інтервалу 6 с. Початок кожного подкадра позначає мітку часу, що відповідає початку/закінченню чергового 6-с інтервалу системного часу GPS. Подкадр складається із 10 30-біт слів. У кожному слові 6 молодших розрядів є перевірними бітами.
У 1-, 2- і 3-му підкадра передаються дані про параметри корекції годинника і дані ефемерид КА, з яким встановлений зв'язок. Зміст і структура цих подкадров залишаються незмінними усім сторінках суперкадра. У 4- та 5-му подкадрах міститься інформація про конфігурацію та стан всіх КА системи, альманахи КА, спеціальні повідомлення, параметри, що описують зв'язок часу GPS з UTC, та інше.
Алгоритми прийому та вимірювання параметрів супутникових радіонавігаційних сигналів
До сегменту споживачів систем GPS та ГЛОНАСС відносяться приймачі сигналів супутників. За вимірами параметрів цих сигналів вирішується навігаційне завдання. Приймач можна поділити на три функціональні частини:
радіочастотну частину;
цифровий ~ корелятор;
процесор.
З виходу антенно-фідерного пристрою (антени) сигнал надходить на радіочастотну частину (рис. 7). Основне завдання цієї частини полягає у посиленні вхідного сигналу, фільтрації, перетворенні частоти та аналого-цифровому перетворенні. Крім цього, з радіочастотної частини приймача надходить тактова частотадля цифрової частини приймача З виходу радіочастотної частини цифрові відліки вхідного сигналу надходять вхід цифрового корелятора.
Малюнок 7. Узагальнена структура приймача
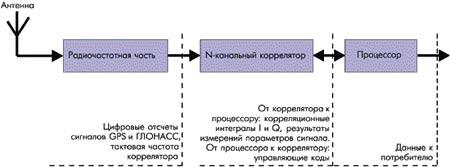
У кореляторі спектр сигналу переноситься на "нульову" частоту. Це проводиться шляхом перемноження вхідного сигналу корелятора з гармонічним опорним коливанням в синфазному і квадратурному каналах. Далі результат перемноження проходить кореляційну обробку шляхом перемноження з опорним далекомірним кодом та накопиченням на періоді далекомірного коду. У результаті отримуємо кореляційні інтеграли I і Q. Відліки кореляційних інтегралів надходять у процесор для подальшої обробки та замикання петель ФАП (фазове автопідстроювання) та ССЗ (схема стеження за затримкою). Вимірювання параметрів сигналу в приймачі проводяться безпосередньо по вхідному сигналу, а, по його точної копії, формованої системами ФАП і ССЗ. Кореляційні інтеграли I і Q дозволяють оцінити ступінь "схожості" (корелюваності) опорного та вхідного сигналів. Завдання корелятора, крім формування інтегралів I і Q - формувати опорний сигнал, згідно з керуючими впливами (кодами управління), що надходять з процесора. Крім того, в деяких приймачах корелятор формує необхідні вимірювання опорних сигналів та передає їх у процесор для подальшої обробки. У той самий час, оскільки опорні сигнали в кореляторі формуються з керуючим кодам, що надходять з процесора, необхідні вимірювання опорних сигналів можна проводити безпосередньо в процесорі, обробляючи відповідним чином керуючі коди, що і робиться в багатьох сучасних приймачах.
Які параметри сигналу вимірює корелятор (процесор)?
Дальність при радіотехнічних вимірах характеризується часом поширення сигналу від об'єкта виміру до вимірювального пункту. У навігаційних системах GPS/ГЛОНАСС випромінювання сигналів синхронізовано зі шкалою часу системи, точніше, зі шкалою часу супутника, що випромінює цей сигнал. У той же час, споживач має інформацію про розбіжність шкали часу супутника та системи. Цифрова інформація, що передається із супутника, дозволяє встановити момент випромінювання деякого фрагмента сигналу (мітки часу) супутником у системному часі. Момент прийому цього фрагмента визначається за шкалою часу приймача. Шкала часу приймача (споживача) формується за допомогою кварцових стандартів частоти, тому спостерігається постійний "догляд" шкали часу приймача щодо шкали часу системи. Різниця між моментом прийому фрагмента сигналу, відрахованим за шкалою часу приймача, і моментом випромінювання супутником, відрахованим за шкалою супутника, помножена на швидкість світла, називається псевдодальністю . Чому псевдодальністю? Тому що вона відрізняється від істинної дальності на величину, що дорівнює добутку швидкості світла на "догляд" шкали часу приймача щодо шкали часу системи. При вирішенні навігаційного завдання цей параметр визначається нарівні з координатами споживача (приймача).
Кореляційні інтеграли, що формуються в кореляторі, дозволяють відстежити модуляцію сигналу супутника символами інформації та обчислити мітку часу у вхідному сигналі. Мітки часу випливають з періодичністю 6 с для GPS і 2 с для ГЛОНАСС і утворюють своєрідну 6(2)-секундну шкалу. У межах одного поділу цієї шкали періоди далекомірного коду утворюють 1мс шкалу. Одна мілісекунда розділена, у свою чергу, на окремі елементи (chips, в термінології GPS): для GPS – 1023, для ГЛОНАСС – 511. Таким чином, елементи далекомірного коду дозволяють визначити дальність до супутника з похибкою ~ 300 м. Для більш точного визначення необхідно знати фазу генератора далекомірного коду. Схеми побудови опорних генераторів корелятора дозволяють визначати фазу з точністю до 0,01 періоду, що становить точність визначення псевдодальності 3 м.
На підставі вимірювань параметрів опорного гармонійного коливання, що формується системою ФАП, визначають частоту і фазу супутника, що несе коливання. Його відхід щодо номінального значення дасть доплерівське зміщення частоти, яким оцінюється швидкість споживача щодо супутника. Крім того, фазові вимірювання несучої дозволяють уточнити дальність до супутника з похибкою кілька мм.
Визначення координат споживача
Для визначення координат споживача необхідно знати координати супутників (щонайменше 4) і дальність від споживача кожного видимого супутника. Для того, щоб споживач міг визначити координати супутників, навігаційні сигнали, що випромінюються ними, моделюються повідомленнями про параметри їх руху. В апаратурі споживача відбувається виділення цих повідомлень та визначення координат супутників на потрібний момент часу.
Координати та складові вектора швидкості змінюються дуже швидко, тому повідомлення про параметри руху супутників містять відомості не про їх координати та складові вектора швидкості, а інформацію про параметри деякої моделі, що апроксимує траєкторію руху КА на досить великому інтервалі часу (близько 30 хвилин). Параметри апроксимуючої моделі змінюються досить повільно, і їх можна вважати постійними на інтервалі апроксимації.
Параметри апроксимуючої моделі входять до складу навігаційних повідомлень супутників. У системі GPS використовується Кеплерівська модель руху з оскулюючими елементами. І тут траєкторія польоту КА розбивається ділянки апроксимації тривалістю за годину. У центрі кожної ділянки визначається вузловий момент часу, значення якого повідомляється споживачеві навігаційної інформації. Крім цього, споживачеві повідомляють параметри моделі оскулюючих елементів на вузловий момент часу, а також параметри функцій, що апроксимують зміни параметрів моделі оскулюючих елементів у часі як попередньому вузловому елементу, так і наступному за ним.
В апаратурі споживача виділяється інтервал часу між моментом часу, який потрібно визначити положення супутника, і вузловим моментом. Потім за допомогою апроксимуючих функцій та їх параметрів, виділених з навігаційного повідомлення, обчислюються значення параметрів моделі елементів, що оскулюють, на потрібний момент часу. На останньому етапі за допомогою звичайних формул моделі кеплерівської визначають координати і складові вектора швидкості супутника.
У системі Глонасс визначення точного становища супутника використовуються диференціальні моделі руху. У цих моделях координати та складові вектора швидкості супутника визначаються чисельним інтегруванням диференціальних рівнянь руху КА, що враховують кінцеву кількість сил, що діють на КА. Початкові умови інтегрування задаються на вузловий момент часу, що розташовується посередині інтервалу апроксимації.
Як було сказано вище, для визначення координат споживача необхідно знати координати супутників (не менше 4) та дальність від споживача до кожного видимого супутника, яка визначається в навігаційному приймачі з точністю близько 1 м. Для зручності розглянемо найпростіший "плоский" випадок, представлений на рис . 8.
Рисунок 8.Визначення координат споживача
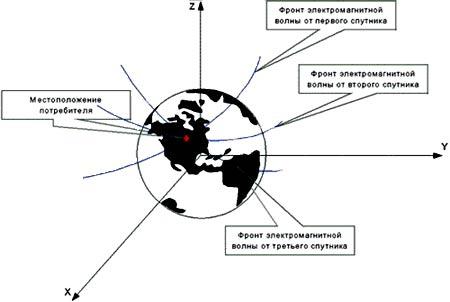
Кожен супутник (рис. 8) можна подати у вигляді точкового випромінювача. І тут фронт електромагнітної хвилі буде сферичним. Точкою перетину двох сфер буде та, де знаходиться споживач.
Висота орбіт супутників становить 20000 км. Отже, другу точку перетину кіл можна відкинути через апріорні відомості, оскільки вона знаходиться далеко в космосі.
Диференційний режим
Супутникові навігаційні системи дозволяють споживачеві отримати координати з точністю близько 10√15 м. Однак для багатьох завдань, особливо для навігації в містах, потрібна більша точність. Один із основних методів підвищення точності визначення місцезнаходження об'єкта заснований на застосуванні відомого в радіонавігації принципу диференціальних навігаційних вимірів.
Диференціальний режим DGPS (Differential GPS) дозволяє встановити координати з точністю до 3 м у динамічній навігаційній обстановці та до 1 м – у стаціонарних умовах. Диференціальний режим реалізується за допомогою контрольного приймача GPS, званого опорною станцією. Вона знаходиться в пункті з відомими координатами, в тому ж районі, що і основний GPS-приймач. Порівнюючи відомі координати (отримані в результаті прецизійної геодезичної зйомки) з виміряними, опорна станція обчислює поправки, які передаються споживачам по радіоканалу заздалегідь обумовленому форматі.
Апаратура споживача приймає від опорної станції диференціальні поправки та враховує їх щодо місцезнаходження споживача.
Результати, отримані за допомогою диференціального методу, значною мірою залежать від відстані між об'єктом та опорною станцією. Застосування цього найефективніше, коли переважними є систематичні помилки, зумовлені зовнішніми (стосовно приймача) причинами. За експериментальними даними, опорну станцію рекомендується розташовувати не далі 500 км від об'єкта.
В даний час існує безліч широкозонних, регіональних і локальних диференціальних систем.
Як широкозонні варто відзначити такі системи, як американська WAAS, європейська EGNOS і японська MSAS. Ці системи використовують геостаціонарні супутники передачі поправок всім споживачам, що у зоні їх покриття.
Регіональні системи призначені для навігаційного забезпечення окремих ділянок земної поверхні. Зазвичай регіональні системи використовують у великих містах, на транспортних магістралях і судноплавних річках, портах і березі морів і океанів. Діаметр робочої зони регіональної системи зазвичай становить від 500 до 2000 км. Вона може мати у своєму складі одну або декілька опорних станцій.
Локальні системи мають максимальний радіус дії від 50 до 220 км. Вони зазвичай включають одну базову станцію. Локальні системи зазвичай поділяють за способом їх застосування: морські, авіаційні та геодезичні локальні диференціальні станції.
Розвиток супутникової навігації
Загальний напрямок модернізації обох супутникових систем GPS та Глонасс пов'язаний з підвищенням точності навігаційних визначень, покращенням сервісу, що надається користувачам, підвищенням терміну служби та надійністю бортової апаратури супутників, покращенням сумісності з іншими радіотехнічними системами та розвитком диференціальних підсистем. Загальний напрямок розвитку систем GPS і Глонасс збігається, але динаміка та досягнуті результати сильно відрізняються.
Удосконалення системи ГЛОНАСС планується здійснювати на базі супутників нового покоління "ГЛОНАСС-М". Цей супутник матиме збільшений ресурс служби і випромінюватиме навігаційний сигнал в діапазоні L2 для цивільних застосувань.
Аналогічне рішення було прийнято в США, де 5 січня 1999 оголошено про виділення 400 млн. дол. на модернізацію системи GPS, пов'язану з передачею C/A-коду на частоті L2 (1222,7 МГц) і введенням третьої несучої L3 (1176, 45 МГц) на КА, які запускатимуться з 2005 року. Сигнал на частоті L2 намічено використовувати для цивільних потреб, не пов'язаних безпосередньо з небезпекою життя людей. Пропонується розпочати реалізацію цього рішення з 2003 року. Третій цивільний сигнал на частоті L3 вирішено використовуватиме потреб цивільної авіації.
Література
Радіотехнічні системи. За ред. Казарінова Ю.М. М: Вища школа, 1990.
Соловйов Ю.А. Системи супутникової навігації. М: Еко-Трендз, 2000.
Глобальна супутникова радіонавігаційна система ГЛОНАСС/За ред. В.М. Харісова, А.І. Перова, В.А. Болдіна. М.: ІПРЖР, 1998.
Ліпкін І.А. Супутникові навігаційні системи. М: Вузовська книга, 2001.
Глобальна навігаційна супутникова система ГЛОНАСС. Інтерфейсний контрольний документ М.: КНИЦЬ ВКС, 1995.
Interface Control Document: GPS Space Segment / Navigation User Interfaces (ICD-GPS-200).Rockwell Int. Corp. 1987.
Ростовський Державний Будівельний Університет
Кафедра прикладної геодезії
Супутникові системи навігації GPSта Глонасс
Виконав: студ гр. ПГ-579 Веремчук Р. В
Перевірив: Яковлєв В. А
Ростов-на-Дону
Вступ
У грудні 1976 р. було прийнято Постанову ЦК КПРС та Ради Міністрів СРСР "Про розгортання Єдиної космічної навігаційної системи ГЛОНАСС (Глобальна навігаційна супутникова система)". Ця постанова по суті лише узаконила роботи зі створення, що вже почалися. нової системи та визначило порядок її розробки та випробувань. Технічні пропозиції щодо системи ГЛОНАСС у складі КА 11Ф654 "Ураган" були розроблені в красноярському НУО прикладної механіки (НУО ПМ) на початку 1976 р. та розглянуті міжвідомчою комісією у серпні того ж року. Система ГЛОНАСС представляє друге покоління вітчизняних супутникових систем навігації. Створення цієї навігаційної системи було зумовлено потребами нових потенційних споживачів, які потребували високоточної прив'язки свого становища у часі та просторі. Як таких споживачів виступали авіація, морський флот, наземні транспортні засоби, космічні апарати, а також спеціальні бойові комплекси (зокрема мобільні МБР середньої та великої дальності). Широку увагу до супутникової навігації привернула успішна експлуатація низькоорбітальних супутникових навігаційних систем морськими споживачами. У 1976 р. на озброєння Радянської Армії було прийнято навігаційно-зв'язкову систему "Циклон-Б" у складі шести космічних апаратів "Парус", що обертаються на навколополярних орбітах висотою 1000 км. Через три роки було здано в експлуатацію супутникову радіонавігаційну систему (СРНС) "Цікада" у складі чотирьох КА на орбітах того ж класу, що й у КА "Парус". І якщо перша система використовувалася виключно на користь МО СРСР, то друга призначалася головним чином для навігації цивільних морських суден. Оснащення супутниковою навігаційною апаратурою суден торговельного флоту виявилося дуже вигідним, оскільки завдяки підвищенню точності судноводіння вдавалося настільки заощадити час плавання та паливо, що бортова апаратура споживача окупувала себе після першого року експлуатації. У ході випробувань цих і попередньої системи "Циклон" було встановлено, що похибка місцевизначення судна, що рухається, за навігаційними сигналами цих супутників становить 250... 300 м. З'ясувалося також, що основний внесок у похибку навігаційних визначень вносять похибки переданих супутникам власних розраховуються та закладаються на борт КА засобами наземного комплексу управління (ПКУ). З метою підвищення точності визначення та прогнозування параметрів орбіт навігаційних супутників було відпрацьовано спеціальну схему проведення вимірювань параметрів орбіт засобами ПКУ, розроблено більш точні методики прогнозування. Для виявлення локальних особливостей гравітаційного поля Землі, які впливають на обрані орбіти навігаційних КА (НКА), такі ж орбіти були запущені спеціальні геодезичні супутники "Космос-842" і "Космос-911". Комплекс вжитих заходів дозволив уточнити координати вимірювальних засобів та обчислити параметри узгоджувальної моделі гравітаційного поля, призначеної спеціально для визначення та прогнозування параметрів руху НКА. В результаті точність переданих у складі навігаційного сигналу власних ефемерид була підвищена практично на порядок, тому їх похибка на інтервалі добового прогнозу не перевищувала 70...80 м. Як наслідок, похибка визначення морськими судами свого місця розташування зменшилася до 80...100 м .
Проте виконати вимоги всіх потенційних класів нових споживачів низькоорбітальні системи було неможливо з принципів, закладених основою їх побудови. Так, якщо для нерухомих споживачів, що мають двоканальну приймальну апаратуру, похибка позиціонування вдалося знизити до 32 м (дані для американської СРНС "Транзит"), то при русі похибки відразу ж починають зростати через неточність числення шляху - низькоорбітальні СРНС не дозволяли визначати швидкість руху. Більше того, за одержуваними вимірами можна визначити лише дві просторові координати. Другим недоліком низькоорбітальних систембула відсутність глобальності покриття, оскільки, наприклад, на екваторі супутники проходили через зону видимості споживача загалом через 1.5 години, що допускає проведення лише дискретних навігаційних сеансів. Нарешті, через використання у сеансі лише одного НКА тривалість вимірювань може сягати 10...16 хв. Велика тривалість сеансів і значні інтервали з-поміж них роблять неминучим застосування спеціальних заходів для обчислення шляху. При цьому помилки числення та обмежують точність визначення місця розташування. Проте була випробувана літакова апаратура стосовно сигналів як системи "Транзит", так і "Цікада". При цьому підтвердилося, що похибка позиціонування слабо залежить від маневрів літака і дійсно визначається переважно похибками знання шляхової швидкості, не виходячи за межі 1.8 км.
СРНС другого покоління спочатку проектувалися як системи, яким усі ці недоліки не властиві. Головною вимогою при проектуванні було забезпечення споживачеві в будь-який час можливості визначення трьох просторових координат, вектора швидкості і точного часу, що досягається шляхом одночасного прийому сигналів від як мінімум чотирьох НКА. Зрештою, це призвело до реалізації важливої технічної ідеї – координації просторового становища НКА на орбітах та координації за часом випромінюваних супутниками сигналів. Координація руху всіх НКА надає системі мережеві властивості, яких вона позбавляється за відсутності корекції положення НКА.
Як орбіт для нової системи спочатку були обрані середньовисокі (20000 км) напівдобові орбіти, які забезпечували оптимальне співвідношення між кількістю КА в системі та величиною зони радіоогляду. Однак згодом висота робочої орбіти була зменшена до 19 100 км. Це було зроблено виходячи з того, що для КА, що мають період звернення, що дорівнює половині доби, проявляється резонансний ефект впливу певних гармонік геопотенціалу, що призводить до досить швидкого "руйнування" заданого відносного положення НКА та конфігурації системи в цілому. Вочевидь, що у разі підтримки системи довелося б частіше проводити корекції орбіти кожного КА. При вибраній висоті орбіти для гарантованої видимості споживачем щонайменше чотирьох супутників їх кількість у системі має становити 18, проте воно було збільшено до 24 з метою підвищення точності визначення власних координат і швидкості споживача шляхом надання йому можливості вибору з числа видимих супутників четвірки, що забезпечує найвищу точність. Слід зазначити, що в даний час ця вимога втратила актуальність, оскільки сучасна стандартна навігаційна апаратура споживача (НАП) має можливість приймати сигнали від 8 до 12 НКА в зоні радіовидимості одночасно, що дозволяє не дбати про вибір оптимальної четвірки, а просто обробляти всі вимірювання, що приймаються. .
Однією з головних проблем створення СРНС, що забезпечує беззапитові навігаційні визначення одночасно за кількома супутниками, є проблема взаємної синхронізації супутникових шкал часу з точністю до мільярдних часток секунди (наносекунд, нс), оскільки розсинхронізація випромінюваних супутниками навігаційних сигналів всього в 10 нс викликає розташування споживача до 10...15 м. Для вирішення завдання високоточної синхронізації бортових шкал часу знадобилася установка на супутниках високостабільних цезієвих стандартів частоти та наземного водневого стандарту (на порядок стабільнішого), а також створення наземних засобів звірення шкал з похибкою 3... 5 нс.
У 1977-78 р.р. у НУО ПМ проводилося ескізне проектування системи, матеріали якого були схвалені у вересні 1978 міжвідомчою комісією під головуванням генерал-майора І. В. Мещерякова. Тактико-технічне завдання (ТТЗ) на систему ГЛОНАСС було погоджено з головнокомандувачами всіх видів Збройних Сил та міністерствами: Мінзагальнемаш, Мінрадіопром, Мінавіапром, Міноборонпром, Мінморфлот, Мінрибгосп, Мінсудпром і Міністерство цивільної авіації. У листопаді 1978 р. ТТЗ було затверджено Міністром оборони СРСР.
Однак на той час через надто довгий період узгодження завдання було зірвано початкові терміни розгортання системи. Тому 29 серпня 1979 р. за ГЛОНАСС вийшла нова Постанова ЦК та РМ. У ньому було встановлено такі терміни виконання робіт за системою:
Початок льотних випробувань та створення системи з 4-6 КА "Ураган" для перевірки основних принципів та технічних характеристик-1981;
Створення системи з 10-12 КА "Ураган" (у двох орбітальних робочих площинах) та здавання її на озброєння у складі та з тактико-технічними характеристиками за погодженням між Міноборони, Мінзагальнемашем та Мінрадіопромом - 1984 рік;
Дооснащення системи до 24 КА – 1987 рік.
Основними розробниками системи у Постанові було визначено:
НВО ПМ Мінзагальнемашу - за системою в цілому;
ПЗ "Радіоприлад" (нині РНДІ КП) Мінзагальнемаш - по наземному комплексу управління, бортовому радіотехнічному комплексу, апаратурі споживачів;
ЛНРТІ (нині РІРВ) Мінрадіопрому – за навігаційно-часовим комплексом.
Однак і ці порядок та терміни довелося ще раз уточнити у липні 1981 р. У новій Постанові ЦК та РМ терміном початку розгортання системи було названо 1982 р.
Літні випробування системи ГЛОНАСС було розпочато 12 жовтня 1982 р. запуском першого КА 11Ф654 "Ураган" N11л та двох габаритно-вагових макетів 11Ф654ГВМ. Потім у наступних шести запусках на орбіту виводилися по два штатні КА та один ГВМ. Це було з неготовністю електронної апаратури супутників. Лише з восьмого запуску в рамках розгортання системи ГЛОНАСС (16 вересня 1986) на орбіту були виведені відразу три штатних КА. Двічі (10 січня та 31 травня 1989 р.) разом із двома КА "Ураган" на орбіту виводилися пасивні геодезичні КА ПКА "Еталон", які використовуються для уточнення параметрів гравітаційного поля та його впливу на орбіти КА "Ураган".
Для відпрацювання навігаційної апаратури було виготовлено базові комплекти по шість штук кожного найменування для ВПС, ВМФ, СВ, МГА, ММФ та РВСН. Усього для льотних випробувань було виділено 22 космічних апарату(9-10 запусків). Це число КА було витрачено до 16 вересня 1987 р. Однак до цього моменту система не була розгорнута навіть для обмеженого використання (12 КА у двох площинах). Лише після запуску 4 квітня 1991 р. у складі ГЛОНАСС було одночасно 12 працездатних КА.
24 вересня 1993 р. першу чергу системи ГЛОНАСС було прийнято на озброєння. З цього моменту почали проводитися запуски КА в третю орбітальну площину. 14 грудня 1995 р. після 27-го запуску "Протона-К" з "Ураганами" розгортання штатної конфігурації системи ГЛОНАСС було завершено. Усього з жовтня 1982 р. по грудень 1998 р. на орбіту було виведено 74 КА "Ураган" та вісім його габаритно-вагових макетів (ГВМ). За час розгортання системи шість "Ураганів" опинилися на нерозрахункових орбітах через відмови розгінного блоку 11С861. За оцінками, проведеними 1997 р., на розгортання системи було витрачено майже 2.5 млрд. $.
Основні засади роботи системи ГЛОНАСС
Супутники системи ГЛОНАСС безперервно випромінюють навігаційні сигнали двох типів: навігаційний сигнал стандартної точності (СТ) у діапазоні L1 (1,6 ГГц) та навігаційний сигнал високої точності (ВТ) у діапазонах L1 та L2 (1,2 ГГц). Інформація, що надається навігаційним сигналом СТ, доступна всім споживачам на постійній та глобальній основі та забезпечує, при використанні приймачів ГЛОНАСС можливість визначення:
· Горизонтальних координат з точністю 50-70 м (ймовірність 99,7%);
· Вертикальних координат з точністю 70 м (ймовірність 99,7%);
складових вектора швидкості з точністю 15 см/с (імовірність 99,7%)
· Точного часу з точністю 0,7 мкс (імовірність 99,7%).
Ці точності можна значно покращити, якщо використовувати диференціальний метод навігації та/або додаткові спеціальні методи вимірювання.
Сигнал ВТ призначений, переважно, для споживачів МО РФ, та її несанкціоноване використання не рекомендується. Питання про надання сигналу ОТ громадянським споживачам перебуває у стадії розгляду.
Для визначення просторових координат та точного часу потрібно прийняти та обробити навігаційні сигнали не менше ніж від 4-х супутників ГЛОНАСС. При прийомі навігаційних радіосигналів ГЛОНАСС приймач, використовуючи відомі радіотехнічні методи, вимірює дальність видимих супутників і вимірює швидкості їх руху.
Одночасно з проведенням вимірювань у приймачі виконується автоматична обробка міток часу та цифрової інформації, що містяться в кожному навігаційному радіосигналі. Цифрова інформація описує положення даного супутника у просторі та часі (ефемеріди) щодо єдиної для системи шкали часу та геоцентричної пов'язаної декартової системи координат. Крім того, цифрова інформація описує положення інших супутників системи (альманах) у вигляді кеплерівських елементів їх орбіт і містить деякі інші параметри. Результати вимірювань та прийнята цифрова інформація є вихідними даними для вирішення навігаційної задачі визначення координат і параметрів руху. Навігаційна задача вирішується автоматично у обчислювальному пристрої приймача, при цьому використовується відомий метод найменших квадратів. В результаті рішення визначаються три координати розташування споживача, швидкість його руху та здійснюється прив'язка шкали часу споживача до високоточної шкали Координованого всесвітнього часу (UTC).
Радіонавігаційне поле
Навігаційні радіосигнали, що випромінюються штатними НКА, утворюють радіонавігаційне поле в навколоземному просторі.
У СРНС ГЛОНАСС кожен штатний НКА випромінює навігаційні радіосигнали 1600 МГц і 1250 МГц у бік Землі за допомогою передавальних антен, робоча частина діаграми спрямованості (ДН) яких має ширину 2 =38 і “висвітлює” диск З0 над поверхнею.
Робочу частину ДН можна подати у вигляді конусного радіопроменя з кутом 2 0 при вершині. Очевидно, що
sin 0 =(h 0 +r)/(H+r),
де r = 6400 км радіус Землі; H = 19100 км висота орбіти НКА.
Підставивши 0 =19 отримаємо h 0 = 2000 км.
За повної ОГ (24 штатних НКА) радіонавігаційне полі на висотах h h 0 = 2000 км безперервно у просторі, тобто. споживач у будь-якій точці цього простору “висвітлюється” радіопроменями не менше ніж від чотирьох НКА, що утворюють по відношенню до нього задовільний за геометричним фактором сузір'я для оперативного автономного визначення координат та вектора швидкості.
На висотах h h 0 радіонавігаційне поле стає дискретним у просторі. Космічні об'єкти на висотах h 0 h H “освітлені” радіопроменями від необхідного для оперативної навігації сузір'я (не менше чотирьох НКА, включаючи НКА нижче за місцевий горизонт) не скрізь, а тільки при знаходженні в певних областях простору.
Космічні об'єкти на висотах h H (наприклад, на геостаціонарній орбіті) будуть "освітлені" на деяких ділянках своєї орбіти радіопроменем від одного або двох НКА (за повної ОГ), і НАП може не оперативно визначити орбіту космічного об'єкта на основі обробки результатів прийому навігаційних радіосигналів на "освітлених" ділянках орбіти.
Обмежимося розглядом безперервного радіонавігаційного поля (h h 0). Основною характеристикою радіонавігаційного поля для наземного споживача є потужності навігаційного радіосигналу від навколозенітного та пригоризонтного НКА на виході "стандартної" приймальної антени (без урахування відображень від поверхні Землі):
P 0 = P п G() G 0 () 2 /(4 R) 2 ,
де P п потужність випромінювання передавача; G() коефіцієнт спрямованості передавальної антени (з урахуванням втрат в АФУ) у напрямку на приймальну антену; G 0 () коефіцієнт спрямованості “стандартної” приймальної антени у напрямку на передавальну антену; довжина хвилі несучого коливання радіосигналу; R дальність від приймальної антени до передавальної антени.
У системі ГЛОНАСС передавальні антени для навігаційних радіосигналів на НКА мають праву кругову поляризацію випромінювання.
Коефіцієнт спрямованості G() передавальних антен у робочому секторі напрямків 19 щодо осі антени становить
Як “стандартну” приймальну антену зручно розглядати ізотропну приймальну антену з круговою поляризацією, G 0 () = 1.
Дальність R від приймальної антени, розміщеної на поверхні Землі, до навколозенітного ( = 90) НКА складе R = H = 19100 км, до пригоризонтного ( = 5) НКА складе R = 24000 км.
Бюджет потужності P 0 вузькосмугових навігаційних радіосигналів на виході "стандартної" приймальної антени:
| 1600 МГц | 1250 МГц | |||
| , кут. град. | 90 | 5 | 90 | 5 |
| P п, дБ Вт | | | ||
| G(), дБ | +10 | +12 | +9 | +11 |
| ( R) 2 , дБ | 182 | 184 | 180 | 182 |
| G 0 (), дБ | 0 | 0 | ||
| P 0 дБ | 157 1 | 157 1 | 162 1 | 162 1 |
Зазначимо, що потужність навігаційного радіосигналу, який приймає наземний споживач за допомогою ізотропної антени, однакова для навколозенітного та пригоризонтного НКА.
Структура сигналу ГЛОНАСС
грубого далекомірного коду, що передається зі швидкістю 511 Кбіт/с (рис. 6в);
послідовності навігаційних даних, що передаються зі швидкістю 50 біт/с (рис. 6а);
меандрового коливання, що передається зі швидкістю 100 біт/с (рис. 6б).
Сигнал в діапазоні L1 (аналогічний C/A-коду GPS) доступний для всіх споживачів в зоні видимості КА. Сигнал у діапазоні L2 призначений для військових потреб і його структура не розкривається.
Для навігаційних радіосигналів ЦІ формується на борту НКА на основі даних, що передаються від ПКУ системи на борт НКА за допомогою радіотехнічних засобів. ЦИ, що передається в навігаційних радіосигналах, структурована у вигляді рядків, кадрів і суперкадрів.
У вузькосмуговому навігаційному радіосигналі 1600 МГц рядок ЦІ має тривалість 2 с (разом з МВ) і містить 85 двійкових символів тривалістю по 20 мс, що передаються відносному коді. Перший символ кожного рядка є початковим (холостим) для відносного коду. Останні вісім символів у кожному рядку є перевірочними символами коду Хеммінга, що дозволяють виправляти одиночний помилковий символ та виявляти два помилкові символи у рядку. Кадр містить 15 рядків (30 с), суперкадр 5 кадрів (2,5 хв).
У складі кожного кадру передається повний обсяг оперативної ЦІ та частина альманаху системи. Повний альманах передається у межах суперкадра.
Оперативна ЦІ в кадрі відноситься до НКА, що випромінює навігаційний радіосигнал, і містить:
· ознаки достовірності ЦІ у кадрі;
· Час початку кадру t k;
· ефемеридну інформацію координати та похідні координат НКА у прямокутній геоцентричній системі координат на момент часу t 0 ;
· Частотно-часові поправки (ЧВП) на момент часу t 0 у вигляді відносної поправки до несучої частоти навігаційного радіосигналу та поправки до БШВ НКА;
· Час t0.
Час t 0 , якого “прив'язані” ЭИ і ЧВП, кратні 30 хв від початку доби.
Альманах системи містить:
· Час, до якого належить альманах;
· Параметри орбіти, номер пари несучих частот та поправку до БШВ для кожного штатного НКА в ОГ (24 НКА);
· Поправку до ШВ системи щодо ШВ країни, похибка поправки не більше 1 мкс.
Альманах системи необхідний НАП для планування сеансу навігації (вибір оптимального сузір'я НКА) і для прийому навігаційних радіосигналів в системі (прогноз доплерівського зсуву несучої частоти). Оперативна ЦІ необхідна НАП в сеансі навігації, так як ЧВП вносяться в результати вимірювань, а ЕІ використовується при визначенні координат і вектора швидкості споживача.
У системі НАВСТАР ЦІ у вузькосмугових навігаційних радіосигналах структурована таким чином: рядок має тривалість 6 c, кадр містить 5 рядків (30 с), суперкадр 25 кадрів (12,5 хв).
Вузькосмугові навігаційні радіосигнали в системі ГЛОНАСС забезпечують більш оперативний прийом (оновлення) альманаху за рахунок більш короткої тривалості суперкадрів (2,5 хв) порівняно з системою НАВСТАР (12,5 хв)
Навігаційні вимірювання в багатоканальної НАП
Розглянемо багатоканальну НАП, що використовує вузькосмугові радіосигнали і призначену для глобальної навігації рухомих наземних об'єктів (сухопутних, морських, повітряних). Вважатимемо, що у НАП застосовується широкоспрямована приймальна антена.
У кожному каналі НАП у режимі стеження за вузькосмуговим навігаційним радіосигналом приймається ЦІ та щомиті вимірюються два навігаційних параметри псевдодальність та радіальна псевдошвидкість.
Псевдодальність від об'єкта до НКА вимірюється НАП за допомогою вимірювання зсуву прийнятої ПСП1 щодо опорного сигналу в НАП. Радіальна псевдошвидкість об'єкта щодо НКА вимірюється за допомогою вимірювання зсуву несучої частоти навігаційного радіосигналу, що приймається, щодо частоти опорного сигналу в НАП. Опорний сигнал НАП формується з використанням кварцового генератора.
Результати вимірювань псевдодальностей S k (t) не менше, ніж для чотирьох обраних НКА (k = 1,2,3,4) з урахуванням введення ПВП, що містяться в кадрі ЦІ, можна виразити так:
S k (t) = R k (t) + c (t) + c k (t) + S k (t),
де R k (t) дальність від об'єкта до НКА; з швидкість світла; (t) зсув ШВ НАП (опорного сигналу) щодо ШВ системи; k (t) похибка ПВП; S k (t) похибка вимірювань у НАП.
У дводіапазонній НАП навігаційні вимірювання псевдодальностей на двох несучих частотах в 1600 МГц та н 1250 МГц дозволяють виключити іоносферні похибки вимірювань наступним чином. Позначимо S 0 (t) виміряна псевдодальність без іоносферних похибок. Оскільки для верхнього та нижнього діапазонів
S (t)=S 0 (t)+А/; S н (t) = S 0 (t) + А/,
де А/ 2 іоносферна похибка виміру псевдодальності, то алгоритм отримання об'єднаного результату S 0 (t), в якому виключені іоносферні похибки буде наступним:
S 0 (t) = S (t)-S н (t); m= н / =7/9.
Похибка дводіапазонного вимірювання псевдодальності можна оцінити наступним чином:
S 0 = S у - S н = 2,53 S у - 1,53 S н.
У сеансі навігації результати вимірювань у НАП псевдодальностей щодо не менше чотирьох НКА, обраних для сеансу, та прийнята ЕІ від обраних НКА дозволяють визначити три координати об'єкта та зсув місцевої ШВ об'єкта (опорного сигналу) щодо ШВ системи.
Завдання цього розділу оцінити похибку вимірювання псевдодальностей у багатоканальній НАП під час використання вузькосмугових навігаційних радіосигналів. Основними джерелами похибок вимірювання псевдодальності в багатоканальній НАП є: шуми та багатопроменеві на вході приймача, тропосфера, іоносфера (в однодіапазонній НАП).
Оцінюючи похибок псевдодальності, обумовлених шумами і многолучевости на вході приймача, вважатимемо, що у каналах НАП в ланцюгах стеження ПСП1 застосовуються дискримінатори затримки, які мають ширина центрального лінійного ділянки дискримінаційної характеристики дорівнює тривалості символу ПСП1.
Шумову похибку (S) однодіапазонних вимірів псевдодальності можна оцінити так:
де c швидкість світла; F 1 тактова частота ПСП1; P c /g ш енергетичний потенціал вузькосмугового навігаційного радіосигналу на вході приймача; k погіршення енергетичного потенціалу у приймачі (k 1,5); T 0 інтервал осреднения (накопичення) вимірів.
Енергетичні потенціали вузькосмугових навігаційних радіосигналів на вході приймача в НАП з широконаправленою приймальною антеною (див. вище) становлять [дБ Гц]:
| =90 | =5 | |
| 1600 МГц | +47...49 | +39...44 |
| 1250 МГц | +43...45 | +34...39 |
і відповідно шумові похибки однодіапазонних вимірів за посередництва T 0 = 1с складуть [м]:
| | | |
| (S ст) 1600 МГц | 1,7...2,1 | 3,3...6,0 |
| (S н) 1250 МГц | 3,0...4,0 | 5,9...10,5 |
Шумову похибку дводіапазонного виміру псевдодальності знайдемо так:
(S 0) = (2 + 2) 1/2;
і відповідно отримаємо за T 0 =1c
(S 0)= 
Навігаційний радіосигнал від пригоризонтного НКА може приходити до наземного рухомого об'єкта як прямим шляхом а й з допомогою дзеркального відбиття від земної поверхні (багатопроменевість). Відображений радіосигнал приходить до об'єкта з напрямку нижче за місцевий горизонт, і при дзеркальному відображенні змінюється на протилежний напрямоккругової поляризації радіосигналу З урахуванням даної обставини та за рахунок просторової вибірковості приймальної антени потужність відбитого радіосигналу P c2 буде набагато меншою за потужність прямого радіосигналу P c1 на вході приймача.
Похибка вимірювання псевдодальності до пригоризонтного НКА, обумовлена багатопроменевістю при використанні вузькосмугового навігаційного радіосигналу, буде максимальна в гіршій ситуації, коли затримка t відбитого радіосигналу щодо прямого радіосигналу на вході приймача дорівнюватиме t = 1 F . При t 1/2F 1 і при t 3/2F 1 похибка буде набагато меншою, ніж у гіршій ситуації. При T 0 =1 c похибка псевдодальності до пригоризонтного НКА через багатопроменевість у гіршій ситуації для вузькосмугових навігаційних радіосигналів дорівнюватиме
Підставляючи P c2 /P c1 = - (30...32) дБ, отримаємо (S)= 3,0 м, яке добре узгоджується з експериментальними даними. Отже, при дводіапазонних вимірах (1600 МГц, 1250 МГц) та T 0 =1 c отримаємо:
(S 0)= ![]() (S) = 9,0м.
(S) = 9,0м.
У тропосфері швидкість поширення радіохвилі дорівнює c=c 0 /n(h), де з 0 швидкість поширення світла у вакуумі; n(h) коефіцієнт заломлення тропосфери на висоті h над поверхнею Землі, n(h) .
Тропосферну похибку беззапитового вимірювання дальності (псевдодальності) для НКА при кутах підвищення НКА можна знайти таким чином:
R()= 
У НАП тропосферні похибки компенсуються розрахунковими виправленнями. Якщо розраховувати тропосферні поправки для середніх параметрів тропосфери (глобально), їх похибка ( R) становитиме 10% від величини поправки R().
Для оцінки похибок можна скористатися простою експоненційною моделлю тропосфери:
n(h) = n(0) e -h/а;
і, підставивши середні значення n(0)=3 10 -4 , a=8 км, отримаємо:
Проведемо оцінку іоносферних похибок виміру псевдодальності в однодіапазонній НАП (1600 МГц). Іоносфера Землі починається з висоти 100 км, на висотах від 300 до 400 електронна концентрація в іоносфері максимальна і вище зі збільшенням висоти зменшується приблизно експоненційно і на висоті 900 км електронна концентрація в іоносфері становить приблизно 10% від максимальної.
Групова швидкість радіосигналу в іоносфері дорівнює = з 0 n(h), де з 0 швидкість світла у вакуумі, n(h) коефіцієнт заломлення іоносфери на висоті h над поверхнею Землі, n(h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 МГц можна скористатися рівністю:
n(h) = 1-n(h) = 40,3 N(h) / f 2 ,
де N(h) електронна концентрація іоносфери на висоті h [ел/см 3]; f-несуча частота радіосигналу [кГц].
Проведемо оцінку іоносферних похибок беззапитового виміру дальності (псевдодальності) до навколозенітного та пригоризонтного НКА.
Іоносферну похибку при вертикальному проходженні радіопроменя до наземного об'єкта від зенітного НКА можна оцінити так:
R 1 = 
Вертикальний профіль величини n(h) залежно від висоти можна представити у вигляді:
1. при h h 1 =100 км n(h) = 0;
2. при h 1 h h 2 = 300 км n(h) лінійно зростає до n m , де n m максимальне значення n(h) ;
3. при h 2 h h 3 = 400 км n(h) = n m ;
4. при h h 3 = 400 км n(h) = n m e
Використовуючи цю апроксимацію для n(h) , отримаємо формулу для оцінки іоносферної похибки беззапитових вимірювань дальності (псевдодальності) до зенітного НКА
R 1 = b е n m;
b е = 0,5 (h 2 -h 1) + (h 3 -h 2) + a = 400 км.
Параметр b е можна назвати товщиною еквівалентної іоносфери, у якої n(h) = n m на висотах h = 200...600 км і поза цими висот n(h) = 0.
Іоносферну похибку R 2 псевдодальності горизонтного НКА ( ) можна приблизно оцінити так:
R 2 = R 1 / cos; sin = r/(r+h 3) ,
де кут між радіопроменем від горизонтного НКА ( ) та місцевою вертикаллю на висоті h 3 =400 км (середина еквівалентної іоносфери) ; r радіус Землі. Проводячи обчислення, отримаємо і відповідно R 2 =3,3 R 1 . Для пригоризонтного НКА ( =5 ...10) можна вважати, що R 2 =3 R 1 .
Знайдемо величину n m для несучої частоти f=1600 МГц навігаційного радіосигналу. У середніх широтах у найгірший сезон (зимовий день) у роки максимальної сонячної активності максимальна електронна концентрація на висотах 300...400 км може досягати N = 3,0 10 6 ел/см 3 і відповідно для f=1,6 10 6 кГц отримаємо
n m =3,8 10 -5 , R 1 =15 м, R 2 =45 м.
Вночі та влітку іоносферні похибки будуть у кілька разів меншими. У роки мінімальної сонячної активності іоносферні похибки навіть у зимовий день у 5...6 разів менші від наведених вище максимальних значень.
Обговоримо перспективу, коли в системі ГЛОНАСС експлуатуватимуться НКА другої модифікації, які випромінюватимуть двокомпонентний навігаційний радіосигнал 1250 МГц замість однокомпонентного радіосигналу 1250 МГц НКА першої модифікації. Відповідно з'являється можливість проводити вимірювання навігаційних параметрів дводіапазонної НАП з використанням вузькосмугових радіосигналів 1600 МГц і1250 МГц для виключення іоносферних похибок вимірювань. Але при дводіапазонному вимірі псевдодальності значно зростуть шумові похибки та похибки через багатопроменевість у порівнянні з однодіапазонною НАП (1600 МГц). На динамічних об'єктах з недетермінованою моделлю руху (T 0 =1 с) недоцільно застосовувати дводіапазонні вузькосмугові навігаційні радіосигнали 1600 МГц та 1250 МГц для визначення координат об'єкта, оскільки в цьому випадку, як було показано вище:
1. шумові похибки псевдодальності до пригоризонтного НКА становитимуть (S 2) = 12...22 м, тобто. перевищать іоносферні похибки вимірювань в однодіапазонній НАП у найгірший сезон (зимовий день);
2. похибки псевдодальності до пригоризонтного НКА, обумовлені багатопроменеві, складуть (S 2) = 9 м (у гіршій ситуації), тобто. будуть порівняти з іоносферними похибками в однодіапазонній НАП у найгірший сезон (зимовий день).
На малодинамічних наземних об'єктах доцільно застосовувати дводіапазонні вузькосмугові навігаційні радіосигнали, оскільки в НАП на малодинамічних об'єктах можна тривало посереднювати результати вимірювань (T 0 =30 c) та знижувати до необхідного рівня шумові похибки псевдодальності та похибки через багатопроменевість.
Структура навігаційних радіосигналів у системі ГЛОНАСС
У системі ГЛОНАСС кожен штатний НКА в ОГ постійно випромінює безперервні шумоподібні навігаційні радіосигнали в двох діапазонах частот 1600 МГц і 1250 МГц. У НАП навігаційні виміри у двох діапазонах частот дозволяють виключити іоносферні похибки вимірів.
Кожен НКА має цезієвий АСЧ, що використовується для формування бортової шкали (БШВ) та навігаційних радіосигналів 1600 МГц та 1250 МГц.
Шумоподібні навігаційні радіосигнали в ОГ НКА відрізняються частотами, що несуть. Оскільки для взаємноантиподних НКА в орбітальних площинах можна застосовувати однакові несучі частоти, то для 24 штатних НКА мінімально необхідна кількість несучих частот у кожному діапазоні частот дорівнює 12. Дане твердження досить очевидне, якщо мати на увазі наземних споживачів (сухопутних, морських, повітряних), оскільки у зоні радіовидимості наземного споживача що неспроможні одночасно перебувати взаємно антиподные НКА. Космічний споживач може одночасно "бачити" взаємноантиподні НКА. Однак є дві сприятливі обставини.
Перше полягає в тому, що з двох взаємноантиподних НКА хоча б один перебуватиме нижче місцевого горизонту стосовно космічного споживача. Практично неможливо застосувати на космічному об'єкті одну широкоспрямовану антену, здатну приймати навігаційні радіосигнали від усіх "видимих" НКА вище та нижче за місцевий горизонт. Тому в НАП на космічному об'єкті застосовують: або одну широкоспрямовану антену для прийому навігаційних радіосигналів від НКА, що знаходяться вище за місцевий горизонт; або кілька антен і кілька приймачів для прийому навігаційних радіосигналів від НКА, що знаходяться вище та нижче за місцевий горизонт.
В обох варіантах НАП на космічному об'єкті здійснюватиме ефективну просторову селекцію навігаційних радіосигналів від взаємноантиподних НКА.
Друга обставина полягає в тому, що в НАП в сеансі навігації здійснюється пошук несучої частоти кожного навігаційного радіосигналу в межах вузької смуги ( 1 кГц) біля прогнозованого значення з урахуванням доплерівського зсуву несучої частоти. Доплерівський зсув може мати максимальні значення 5 кГц НАП на наземних об'єктах і 40 кГц НАП на низькоорбітальних космічних об'єктах. Отже, НАП на космічному об'єкті здійснюється ефективна доплерівська селекція навігаційних радіосигналів від радіовидимих НКА.
Таким чином, навігаційні радіосигнали взаємноантиподних НКА з однаковими частотами, що несуть, будуть надійно розділені в НАП на космічному об'єкті за рахунок просторової та доплерівської селекції.
Навігаційний радіосигнал 1600 МГц двокомпонентний. На заданій несучій частоті в радіопередавачі формуються два однакові за потужністю шумоподібні фазоманіпульовані навігаційні радіосигнали “у квадратурі” (взаємний зсув по фазі на 90): вузькосмуговий та широкосмуговий.
Вузькосмуговий навігаційний радіосигнал 1600 МГц утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичною двійковою псевдовипадковою послідовністю (ПСП1) з тактовою частотою F 1 = 0,511 МГц і з періодом повторення Т1 = 1. ПСП1 являє собою М-послідовність з характерним поліномом 1 + X 3 + X 5 . Шляхом інвертування ПСП1 передаються мітки часу (МВ) бортової шкали часу (БШВ) НКА та двійкові символи цифрової інформації (ЦІ). Мітка часу має тривалість 0,3 с і передається наприкінці кожного двосекундного інтервалу часу (наприкінці парних секунд). Мітка часу містить 30 двійкових символів тривалістю 10 мс і є укороченою на один символ 31-символьну М-послідовність.
У кожному двосекундному рядку на інтервалі часу 1,7 с передаються 85 двійкових символів ЦІ, тривалістю 20 мс і перемножені на меандр, що має тривалість символів 10 мс. Межі символів меандра, МВ та ЦІ когерентні. У приймачі за допомогою меандру здійснюється символьна синхронізація для МВ та за її допомогою рядкова та символьна синхронізація ЦІ.
Широкосмуговий навігаційний радіосигнал 1600 МГц утворюється за допомогою маніпуляції фази коливання на 180 періодичною двійковою послідовністю ПСП2 з тактовою частотою F 2 =5,11 МГц. Шляхом інвертування ПСП2 передаються двійкові символи ЦІ тривалістю 20 мс.
Навігаційний радіосигнал 1250 МГц, випромінюваний НКА першої модифікації однокомпонентний широкосмуговий шумоподібний радіосигнал, що утворюється за допомогою маніпуляції фази коливання на 180 періодичної двійкової ПСП2 (F 2 = 5,11 МГц) без ін. без передачі ЦІ. Навігаційний радіосигнал 1250 МГц, що випромінюється НКА другої модифікації, міститиме два однакових за потужністю шумоподібних радіосигналу 1250 МГц у квадратурі:
1. вузькосмуговий навігаційний радіосигнал 1250 МГц з ПСП1 (F 1 = 0,511 МГц, T 1 = 1 мс);
2. широкосмуговий навігаційний радіосигнал 1250 МГц із ПСП2 (F 2 =5,11 МГц) без ЦІ.
Оскільки частота інвертування ПСП багато менше її тактової частоти, то ширина основного "пелюстки" огинає спектра потужності шумоподібного фазоманіпульованого навігаційного радіосигналу дорівнює подвійному значенню тактової частоти ПСП. Отже, ширина основного "пелюстки" огинальної спектру потужності вузькосмугового навігаційного радіосигналу дорівнює 1,022 МГц, широкосмугового 10,22 МГц.
При проектуванні СРНС ГЛОНАСС була вироблена наступна “сітка” номінальних значень несучих частот для навігаційних радіосигналів у двох діапазонах частот верхньому 1600 МГц (В) та нижньому 1250 МГц (Н):
вk = в0 +k в; в0 = 1602,0000 МГц;
=0,5625 МГц;
нk = н0 +k н; н0 = 1246,0000 МГц;
н =0,4375 МГц;
вk / нk = 9/7;
де k умовний порядковий номер пари несучих частот вk та нk для навігаційних радіосигналів 1600 МГц та 1250 МГц.
Радіопередавачі навігаційних радіосигналів в НКА першої модифікації випромінюють навігаційні радіосигнали на несучих частотах, що перемикаються, з номерами k = 1, ... ,24.
Наведемо значення крайніх несучих частот навігаційних радіосигналів:
в1 = 1602,5625 МГц; в24 = 1615,5000 МГц;
н1 = 1246,4375 МГц; н24 = 1256,5000 МГц;
Робочі спектри навігаційних радіосигналів на несучих частотах з номерами k = 1, ...,24 займають смуги частот:
а) вузькосмугові навігаційні радіосигнали 1602,0...1616,0 МГц;
б) широкосмугові навігаційні радіосигнали 1597,4......1620,6 МГц, 1241,3...1261,6 МГц.
У діапазоні частот 1600 МГц та 1250 МГц згідно з Регламентом радіозв'язку виділені смуги частот:
а) для супутникового радіозв'язку (Космос Земля) 1559,0...1610,0 МГц; 1215,0...1260,0 МГц;
б) для повітряної радіонавігації 1559,0...1626,5 МГц.
ВАКР-87 розподілив смугу частот 1610,6...1613,8 МГц для радіоастрономії на первинній основі. Щоб знизити й надалі повністю виключити радіоперешкоди радіотелескопам у діапазоні частот 1610,6...1613,8 МГц із боку навігаційних радіосигналів системи ГЛОНАСС, Адміністрація системи ГЛОНАСС прийняла 1993р. рішення, згідно з яким для 24 штатних НКА в системі ГЛОНАСС будуть використовуватися такі номери (k) несучих частот:
1. до1998 р. k = 1, ..., 15; k = 21, ..., 24;
2. з 1998 р. до 2005 р. k = 1, ..., 12;
3. з 2005 р. k = -7,...,4.
На першому етапі (до 1998 р.) у радіоастрономічній смузі практично немає спектрів вузькосмугових навігаційних радіосигналів 1600 МГц, а до 2005 р. з радіоастрономічної смуги виведуть і спектри широкосмугових навігаційних радіосигналів. Третій етап буде реалізований за рахунок застосування НКА другої модифікації, в якій передавачі навігаційних радіосигналів можуть випромінювати навігаційні радіосигнали на будь-якій парі несучих частот, що перемикаються, з номерами k=-7,0,...+12.
У системі НАВСТАР використовуються безперервні шумоподібні навігаційні радіосигнали на двох несучих частотах (верхній та нижній)
в =1575,42 МГц; н =1227,6 МГц,
та застосовується кодовий поділ навігаційних радіосигналів для 24 штатних НКА.
Навігаційний радіосигнал на верхній несучій частоті у двокомпонентний, він містить два фазоманіпульовані шумоподібні навігаційні радіосигнали у квадратурі (зсув по фазі на 90): вузькосмуговий і широкосмуговий.
Вузькосмуговий навігаційний радіосигнал утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної ПСП1 з тактовою частотою F 1 = 1,023 МГц і з періодом повторення T 1 = 1 мс. Двійкові символи ЦІ тривалістю 20 мс передаються інвертуванням ПСП1.
Широкосмуговий навігаційний радіосигнал утворюється за допомогою маніпуляції фази несучого коливання на 180 періодичної ПСП2 з тактовою частотою F 2 = 10,23 МГц. Двійкові символи ЦІ тривалістю символів 20 мс передаються інвертуванням ПСП2.
Навігаційний радіосигнал н однокомпонентний, широкосмуговий, утворений за допомогою маніпуляції фази коливання на 180 періодичної ПСП2 без інвертування.
Широкосмугові навігаційні радіосигнали у системах НАВСТАР та ГЛОНАСС призначені для використання санкціонованими споживачами та мають захист від несанкціонованого використання.
Вузькосмугові навігаційні радіосигнали в системах НАВСТАР та ГЛОНАСС є відкритими та призначені для цивільних споживачів. Але в системі НАВСТАР ці сигнали штучно спотворюються за допомогою процедури селективного доступу, що погіршує точність навігації для неліцензійних споживачів.
Точність глобальної навігації рухомих наземних об'єктів
Проведемо оцінку точності визначення координат наземного рухомого об'єкта при глобальній оперативній навігації за допомогою багатоканальної НАП, яка використовує вузькосмугові навігаційні радіосигнали із частотою 1600 МГц у системі ГЛОНАСС із повною ОГ штатних НКА.
Похибка визначення координат рухомого об'єкта залежить від геометричних факторів використовуваного в сеансі навігації сузір'я радіобачених НКА та обумовлені похибками ЕІ та ЧВП у кадрах ЦІ, що приймаються від НКА, та похибками вимірювань у НАП псевдодальностей до НКА.
Оцінюючи точності координат рухомого об'єкта похибки ЭИ і ЧВП можна перерахувати в еквівалентні похибки псевдодальностей до НКА.
Похибки координат НКА, перераховані на еквівалентні похибки псевдодальності, є проекції похибок координат НКА на напрямок від НКА до об'єкта. Позначимо: похибки координат НКА у вертикальній та горизонтальній площинах. З простих геометричних побудов можна отримати такі формули для перерахунку похибок координат НКА в еквівалентні похибки псевдодальностей (дальностей) від об'єкта до НКА:
1. для навколозенітних НКА
S 1 = H 1 при ;
S 1 = H 1 +0,15 M 1 при 45 ;
2. для пригоризонтного НКА
S 2 = H 2 +0,25 M 2 при 2 0.
Похибки ЕІ при прогнозі на добу для НКА першої модифікації (див. вище) в середньому становлять (H) = 4 м, (L) = 15 м, і, отже, еквівалентні похибки псевдодальностей становитимуть:
(S 1) = 4,0...4,6 м та (S 2) = 5,5 м.
Похибка ЧВП при прогнозі на 12 год для НКА першої модифікації становить Б = 14 нс і, відповідно, еквівалентна похибка псевдодальності дорівнює S) = 4,2 м.
При використанні вузькосмугових навігаційних радіосигналів похибки вимірювань псевдодальності для навколозенітного S 1) та пригоризонтного S 2) НКА наведені вище.
Складемо сумарний бюджет похибок псевдодальностей без іоносфери (який називатимемо інструментальною похибкою псевдодальності) для багатоканальної НАП, яка використовує вузькосмугові однодіапазонні (1600 МГц) навігаційні радіосигнали (T 0 = 1 с):
У шестиканальній НАП на наземному рухомому об'єкті максимальні (0,95) інструментальні похибки позиціонування об'єкта в горизонтальній p і вертикальній z площинах пов'язані з інструментальними похибками псевдодальності до "високого" (околозенітного) НКА (S 1) і до "низького" (пригориз) ) НКА (S 2) наступним чином (див. вище):
у кращих ситуаціях p = 2,0 (S 2); z = 2,0 (a);
у найгірших ситуаціях p = 2,2 (S 2); z = 2,2 (a),
(a) = 1/2 .
Використовуючи ці формули та отримані вище значення інструментальних похибок псевдодальностей, знайдемо оцінки максимальних інструментальних похибок позиціонування наземних динамічних (T 0 =1 с) об'єктів при використанні вузькосмугових навігаційних радіосигналів в шестиканальній однодіапазонній НАП (1600 МГц):
1. у кращих ситуаціях (S 1) = 6,2 м; (S 1) = 7,7 м і відповідно p = 15,4 м; z = 34 м;
2. у найгірших ситуаціях (S 1) = 6,6 м; (S 1) = 9,6 м і відповідно p = 21 м; z = 42 м.
Сувора оцінка вкладу іоносферних похибок визначення координат наземного об'єкта при застосуванні однодіапазонної НАП є складним завданням, дамо приблизний аналіз.
У попередньому розділі оцінили іоносферні похибки вимірювання псевдодальностей в однодіапазонній НАП. Було показано, що іоносферна похибка псевдодальності (дальності) до пригоризонтного НКА ( =5 10) дорівнює R 2 =3 R 1 , де R 1 іоно. Іоносферні похибки псевдодальностей у сеансі залежить від часу проведення сеансу: мінімальні вночі, максимальні вдень.
Нехай наземний об'єкт перебуває під перетином двох орбітальних кілець, і в сеансі навігації використовуються шість НКА: два навколозенітні і чотири пригоризонтні. Очевидно, що якщо сеанс навігації проводиться в близькополудневий час, то іоносферні похибки псевдодальностей для пригоризонтних НКА мало відрізнятимуться один від одного і відповідно чотири різниці між псевдодальністю до пригоризонтного і до зенітного НКА приблизно однакові D = R 2 2 R 1 . У цій ситуації іоносферні похибки визначення координат наземного об'єкта в сеансі навігації в опівдні можна оцінити як
z=2 D=4 R 1 ; x, y= 0,5 D= R 1 .
Якщо сеанс навігації проводиться в ранковий або вечірній час, то іоносферні похибки псевдодальностей до пригоризонтних НКА сильно відрізнятимуться, і для таких сеансів навігації іоносферні похибки визначення координат можна приблизно оцінити як: x, y, z = де R 1 іоносферна похибка псевдодальності до зенітного НКА у денний час.
Якщо наземний об'єкт рівновіддалений від трьох орбітальних кілець, то в сеансі навігації немає навколозенітного НКА і “високі” НКА мають кути піднесення 1 = 41 ... 45 . Іоносферні похибки визначення координат наземного об'єкта в такому сеансі навігації будуть не більшими, ніж у сеансі, в якому є навколозенітний НКА.
Таким чином, у сеансах навігації наземних об'єктів при використанні шестиканальної однодіапазонної НАП максимальні іоносферні похибки визначення координат об'єкта можна оцінити так:
x, y = (1...2) R 1 ; z = (2...4) R 1 ,
де R 1 іоносферна похибка при вертикальному радіопромені в денний час.
У найгірший сезон (зимовий день) у роки максимальної сонячної активності R 1 = 15 м. Отже, максимальні іоносферні похибки визначення місця наземного об'єкта становитимуть
p = [( x) 2 +( y) 2 ] 1/2 = 21...42 м; z = 30...60 м.
Наведемо отримані оцінки максимальних сумарних (інструментальних та іоносферних) похибок глобальної навігації у СРНС ГЛОНАСС при використанні вузькосмугових навігаційних радіосигналів 1600 МГц у шестиканальній НАП на динамічних (T 0 = 1с) наземних об'єктах у роки максимальної сонячної активності:
У роки мінімальної сонячної активності іоносферні похибки будуть у 5...6 разів меншими, і відповідно максимальні сумарні похибки глобальної навігації наземних рухомих об'єктів становитимуть:
Супутник ГЛОНАСС
Супутник ГЛОНАСС конструктивно складається з циліндричного гермоконтейнера з приладовим блоком, рами антенно-фідерних пристроїв, приладів системи орієнтації, сонячних панелей батарей з приводами, блоку рухової установки і жалюзі системи терморегулювання з приводами. На супутнику також встановлені оптичні кутові відбивачі, призначені для калібрування радіосигналів вимірювальної системи за допомогою вимірювань дальності до супутника в оптичному діапазоні, а також уточнення геодинамічних параметрів моделі руху супутника. Конструктивно кутові відбивачі формуються як блоку, постійно відстежує напрям на центр Землі. Площа кутових відбивачів-0,25 м2.
До складу бортової апаратури входять:
· Навігаційний комплекс;
· Комплекс управління;
· Система орієнтації та стабілізації;
· Система корекції;
· Система терморегулювання;
· Система електропостачання.
Навігаційний комплекс забезпечує функціонування супутника як елемента системи ГЛОНАСС. До складу комплексу входять: синхронізатор, формувач навігаційних радіосигналів, бортовий комп'ютер, приймач навігаційної інформації та передавач навігаційних радіосигналів.
Синхронізатор забезпечує видачу високостабільних синхрочастот на бортову апаратуру, формування, зберігання, корекцію та видачу бортової шкали часу.
Формувач навігаційних радіосигналів забезпечує формування псевдовипадкових фазоманіпульованих навігаційних радіосигналів, що містять далекомірний код та навігаційне повідомлення.
Комплекс управління забезпечує управління системами супутника та контролює правильність їх функціонування. До складу комплексу входять: командно-вимірювальна система, блок управління бортовою апаратурою та система телеметричного контролю.
Командно-вимірювальна система забезпечує вимірювання дальності у запитному режимі, контроль бортової шкали часу, управління системою за разовими командами та тимчасовими програмами, запис навігаційної інформації до бортового навігаційного комплексу та передачі телеметрії.
Блок управління забезпечує розподіл харчування на системи та прилади супутника, логічну обробку, розмноження та посилення разових команд.
Система орієнтації та стабілізації забезпечує заспокоєння супутника після відокремлення від ракети-носія, початкову орієнтацію сонячних батарей на Сонці та поздовжньої осі супутника на Землю, потім орієнтацію поздовжньої осі супутника на центр Землі та націлювання сонячних батарей на Сонце, а також стабілізацію супутника у процесі . В системі використовуються прилад на основі інфрачервоної побудови місцевої вертикалі (для орієнтації на центр Землі) та прилад для орієнтації на Сонці. Похибка орієнтації на центр Землі не гірша за 3град., а відхилення нормалі до поверхні сонячної батареї від напрямку на Сонце - не більше 5град. Для мінімізації збурень на рух центру мас супутника розвантаження двигунів маховиків здійснюється за допомогою магнітопроводу. Як виконавчий орган при здійсненні заспокоєння та стабілізації супутника під час видачі імпульсу корекції використовується рухова установка.
Режим заспокоєння, у результаті якого відбувається гасіння кутових швидкостей, входить у зоні радіовидимості.
У режимі початкової орієнтації на Сонці здійснюється розворот супутника щодо поздовжньої осі за допомогою двигунів-маховиків, що управляють, до появи Сонця в полі зору приладу орієнтації на Сонці, який встановлений на панелі сонячних батарей.
Режим орієнтації Землю починається з положення орієнтації Сонце шляхом розвороту супутника з допомогою двигунів-маховиків вздовж осі, орієнтованої Сонце, до появи Землі у зору приладу орієнтації на центр Землі. У штатному режимі забезпечується орієнтація осі супутника разом з антенами на центр Землі за допомогою керуючих двигунів-маховиків за сигналами з приладів орієнтації на центр Землі, орієнтація сонячних батарей на Сонці шляхом розвороту супутника разом сонячними батареями за допомогою керуючого двигуна-маховика по одному каналу та розворотів панелей батарей щодо корпусу супутника за допомогою приводу обертання сонячних батарей іншим каналом за сигналами приладів орієнтації на Сонце.
У режимі орієнтації перед проведенням корекції та стабілізації супутника під час видачі імпульсу корекції відстеження орієнтації на Сонці не проводиться.
Система корекції забезпечує приведення супутника в задане положення у площині орбіти та її утримання у межах за аргументом широти. Система включає рухову установку та блок керування їй. Двигуна установка складається з 24 двигунів орієнтації з тягою 10 г та двох двигунів корекції з тягою 500 г.
Система терморегулювання забезпечує потрібний тепловий режим супутника. Регулювання тепла, що відводиться з гермоконтейнера здійснюється жалюзі, які відкривають або закривають радіаційну поверхню в залежності від температури газу. Відведення тепла від приладів здійснюється циркулюючим газом за допомогою вентилятора.
Система електропостачання включає сонячні батареї, акумуляторні батареї, блок автоматики та стабілізацію напруги. Початкова потужність сонячних батарей – 1600 Вт, площа – 17,5 м2.
Під час проходження супутником тіньових ділянок Землі та Місяця живлення бортових систем здійснюється за рахунок акумуляторних батарей. Їхня розрядна ємність становить 70 ампер-годин.
Для забезпечення надійності на супутнику встановлюються по два або три комплекти основних бортових систем.
Таким чином, на супутник ГЛОНАСС покладено виконання таких функцій:
· Випромінювання високостабільних радіонавігаційних сигналів;
· Прийом, зберігання та передача цифрової навігаційної інформації;
· Формування, оцифрування та передача сигналів точного часу;
· Ретрансляція або випромінювання сигналів для проведення траєкторних вимірювань для контролю орбіти та визначення поправок до бортової шкали часу;
· Прийом та обробка разових команд;
· Прийом, запам'ятовування та виконання тимчасових програм управління режимами функціонування супутника на орбіті;
· Формування телеметричної інформації про стан бортової апаратури та передача її для обробки та аналізу наземному комплексу управління;
· прийом та виконання кодів/команд корекції та фазування бортової шкали часу;
· Формування та передача "ознака несправності" при виході вижних контрольованих параметрів за межі норми.
Управління супутниками ГЛОНАСС здійснюється в автоматизованому режимі.
Виведення супутників ГЛОНАСС на орбіту здійснюється носієм важкого класу "ПРОТОН" з розгінним блоком із космодрому Байконур. Носій одночасно виводить три супутники ГЛОНАСС.
Схема виведення включає:
· Виведення космічної головної частини на проміжну кругову орбіту з висотою ~200 км;
· Перехід на еліптичну орбіту з перигеєм ~ 200 км, апогеєм ~ 19100 км та нахилом 64,3 град.
Переведення кожного супутника в задану точку орбітальної площини проводиться за допомогою супутникової рухової установки.
Точність приведення до робочої точки орбіти:
· За періодом звернення - 0,5 с;
· За аргументом широти - 1град.;
· За ексцентриситетом - ~0,01;
· За нахилення орбіти - ~0,3 град.
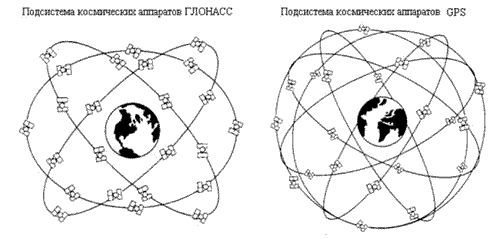
Космічний сегмент систем ГЛОНАСС та GPS
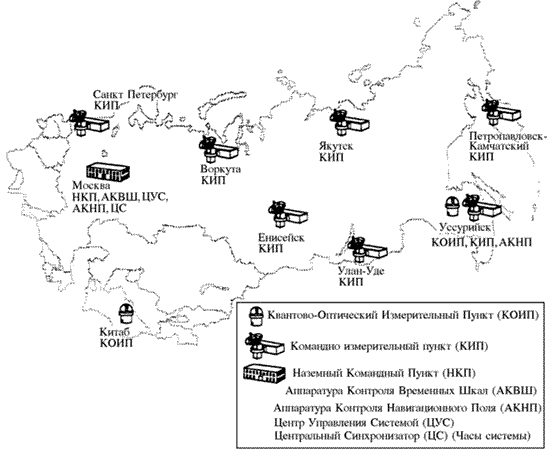
Структура навігаційних радіосигналів системи GPS
У системі GPS використовується кодовий поділ сигналів (CDMA), тому всі супутники випромінюють сигнали з однаковою частотою. Кожен супутник системи GPS випромінює два фазоманіпульовані сигнали. Частота першого сигналу становить L1 = 1575,42 МГц, а другого – L2 = 1227,6 МГц. Сигнал несучої частоти L1 модулюється двома двійковими послідовностями, кожна з яких утворена шляхом підсумовування по модулю 2 далекомірного коду і системних і навігаційних даних, що передаються, формуються зі швидкістю 50 біт/с. На частоті L1 передаються два квадратурні компоненти, біфазно маніпульовані двійковими послідовностями. Перша послідовність є сумою за модулем 2 точного далекомірного коду Р або засекреченого коду Y та навігаційних даних. Друга послідовність також є сумою за модулем 2 грубого С/A (відкритого) коду і тієї ж послідовності даних навігацій.
Радіосигнал на частоті L2 біфазно маніпульований лише однією з двох раніше розглянутих послідовностей. Вибір модулюючої послідовності здійснюється за командою із Землі.
Кожен супутник використовує властиві лише йому далекомірні коди С/A і Р(Y), що дозволяє розділяти супутникові сигнали. У процесі формування точного далекомірного Р(Y) коду одночасно формуються мітки часу супутникового сигналу.
Склад та структура навігаційних повідомлень супутників системи GPS
Структурний поділ навігаційної інформації супутників системи GPS здійснюється на суперкадри, кадри, підкадри та слова. Суперкадр утворюється з 25 кадрів та займає 750 с (12,5 хв). Один кадр передається протягом 30 сек і має розмір 1500 біт. Кадр поділено на 5 підкадрів по 300 біт і передається протягом інтервалу 6 с. Початок кожного подкадра позначає мітку часу, що відповідає початку/закінченню чергового 6-с інтервалу системного часу GPS. Подкадр складається із 10 30-біт слів. У кожному слові 6 молодших розрядів є перевірними бітами.
У 1-, 2- та 3-му подкадрах передаються дані про параметри корекції годинника і дані ефемерид КА, з яким встановлений зв'язок. Зміст і структура цих подкадров залишаються незмінними усім сторінках суперкадра. У 4- та 5-му подкадрах міститься інформація про конфігурацію та стан всіх КА системи, альманахи КА, спеціальні повідомлення, параметри, що описують зв'язок часу GPS з UTC, та інше.
Алгоритми прийому та вимірювання параметрів супутникових радіонавігаційних сигналів
До сегменту споживачів систем GPS та ГЛОНАСС відносяться приймачі сигналів супутників. За вимірами параметрів цих сигналів вирішується навігаційне завдання. Приймач можна поділити на три функціональні частини:
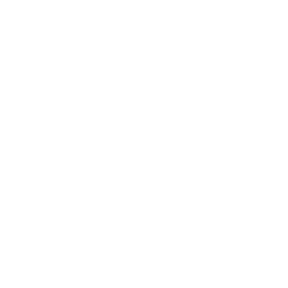 радіочастотну частину;
радіочастотну частину;
цифровий ~ корелятор;
процесор.
З виходу антенно-фідерного пристрою (антени) сигнал надходить на радіочастотну частину Основне завдання цієї частини полягає у посиленні вхідного сигналу, фільтрації, перетворенні частоти та аналого-цифровому перетворенні. Крім цього, з радіочастотної частини приймача надходить тактова частота цифрової частини приймача. З виходу радіочастотної частини цифрові відліки вхідного сигналу надходять вхід цифрового корелятора.
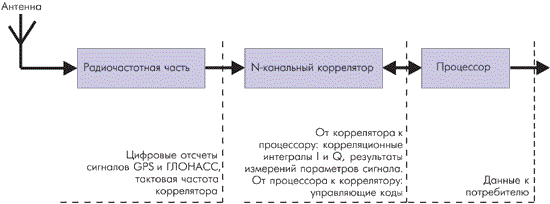
Узагальнена структура приймача
У кореляторі спектр сигналу переноситься на "нульову" частоту. Це здійснюється шляхом перемноження вхідного сигналу корелятора з опорним гармонійним коливанням у синфазному та квадратурному каналах. Далі результат перемноження проходить кореляційну обробку шляхом перемноження з опорним далекомірним кодом та накопиченням на періоді далекомірного коду. У результаті отримуємо кореляційні інтеграли I і Q. Відліки кореляційних інтегралів надходять у процесор для подальшої обробки та замикання петель ФАП (фазове автопідстроювання) та ССЗ (схема стеження за затримкою). Вимірювання параметрів сигналу в приймачі проводяться безпосередньо по вхідному сигналу, а, по його точної копії, формованої системами ФАП і ССЗ. Кореляційні інтеграли I та Q дозволяють оцінити ступінь “схожості” (корелюваності) опорного та вхідного сигналів. Завдання корелятора, крім формування інтегралів I і Q - формувати опорний сигнал, згідно з керуючими впливами (кодами управління), що надходять з процесора. Крім того, в деяких приймачах корелятор формує необхідні вимірювання опорних сигналів та передає їх у процесор для подальшої обробки. У той самий час, оскільки опорні сигнали в кореляторі формуються по керуючим кодам, які з процесора, необхідні вимірювання опорних сигналів можна проводити у процесорі, обробляючи відповідним чином керуючі коди, що робиться у багатьох сучасних приймачах.
Які параметри сигналу вимірює корелятор (процесор)?
Дальність при радіотехнічних вимірах характеризується часом поширення сигналу від об'єкта виміру до вимірювального пункту. У навігаційних системах GPS/ГЛОНАСС випромінювання сигналів синхронізовано зі шкалою часу системи, точніше, зі шкалою часу супутника, що випромінює цей сигнал. У той же час, споживач має інформацію про розбіжність шкали часу супутника та системи. Цифрова інформація, що передається із супутника, дозволяє встановити момент випромінювання деякого фрагмента сигналу (мітки часу) супутником у системному часі. Момент прийому цього фрагмента визначається за шкалою часу приймача. Шкала часу приймача (споживача) формується з допомогою кварцових стандартів частоти, тому спостерігається постійний “догляд” шкали часу приймача щодо шкали часу системи. Різниця між моментом прийому фрагмента сигналу, відрахованим за шкалою часу приймача, і моментом випромінювання його супутником, відрахованим за шкалою супутника, помножена на швидкість світла, називається псевдодальністю. Чому псевдодальністю? Тому що вона відрізняється від істинної дальності на величину, рівну добутку швидкості світла на "догляд" шкали часу приймача щодо шкали часу системи. При вирішенні навігаційного завдання цей параметр визначається нарівні з координатами споживача (приймача).
Кореляційні інтеграли, що формуються в кореляторі, дозволяють відстежити модуляцію сигналу супутника символами інформації та обчислити мітку часу у вхідному сигналі. Мітки часу випливають з періодичністю 6 с для GPS і 2 с для ГЛОНАСС і утворюють своєрідну 6(2)-секундну шкалу. У межах одного поділу цієї шкали періоди далекомірного коду утворюють 1мс шкалу. Одна мілісекунда розділена, у свою чергу, на окремі елементи (chips, у термінології GPS): для GPS – 1023, для ГЛОНАСС – 511. Таким чином, елементи далекомірного коду дозволяють визначити дальність до супутника з похибкою» 300 м. Для більш точного визначення необхідно знати фазу генератора далекомірного коду. Схеми побудови опорних генераторів корелятора дозволяють визначати фазу з точністю до 0,01 періоду, що становить точність визначення псевдодальності 3 м.
На підставі вимірювань параметрів опорного гармонійного коливання, що формується системою ФАП, визначають частоту і фазу супутника, що несе коливання. Його відхід щодо номінального значення дасть доплерівське зміщення частоти, яким оцінюється швидкість споживача щодо супутника. Крім того, фазові вимірювання несучої дозволяють уточнити дальність до супутника з похибкою кілька мм.
Для визначення координат споживача необхідно знати координати супутників (щонайменше 4) і дальність від споживача кожного видимого супутника. Для того, щоб споживач міг визначити координати супутників, навігаційні сигнали, що випромінюються ними, моделюються повідомленнями про параметри їх руху. В апаратурі споживача відбувається виділення цих повідомлень та визначення координат супутників на потрібний момент часу.
Координати та складові вектора швидкості змінюються дуже швидко, тому повідомлення про параметри руху супутників містять відомості не про їх координати та складові вектора швидкості, а інформацію про параметри деякої моделі, що апроксимує траєкторію руху КА на досить великому інтервалі часу (близько 30 хвилин). Параметри апроксимуючої моделі змінюються досить повільно, і їх можна вважати постійними на інтервалі апроксимації.
Параметри апроксимуючої моделі входять до складу навігаційних повідомлень супутників. У системі GPS використовується Кеплерівська модель руху з оскулюючими елементами. І тут траєкторія польоту КА розбивається ділянки апроксимації тривалістю за годину. У центрі кожної ділянки задається вузловий момент, значення якого повідомляється споживачеві навігаційної інформації. Крім цього, споживачеві повідомляють параметри моделі оскулюючих елементів на вузловий момент часу, а також параметри функцій, що апроксимують зміни параметрів моделі оскулюючих елементів у часі як попередньому вузловому елементу, так і наступному за ним.
В апаратурі споживача виділяється інтервал часу між моментом часу, який потрібно визначити положення супутника, і вузловим моментом. Потім за допомогою апроксимуючих функцій та їх параметрів, виділених з навігаційного повідомлення, обчислюються значення параметрів моделі елементів, що оскулюють, на потрібний момент часу. На останньому етапі за допомогою звичайних формул моделі кеплерівської визначають координати і складові вектора швидкості супутника.
У системі Глонасс визначення точного становища супутника використовуються диференціальні моделі руху. У цих моделях координати та складові вектора швидкості супутника визначаються чисельним інтегруванням диференціальних рівнянь руху КА, що враховують кінцеву кількість сил, що діють на КА. Початкові умови інтегрування задаються на вузловий момент часу, що знаходиться посередині інтервалу апроксимації.
Як було сказано вище, для визначення координат споживача необхідно знати координати супутників (не менше 4) та дальність від споживача до кожного видимого супутника, яка визначається в навігаційному приймачі з точністю близько 1 м. Для зручності розглянемо найпростіший “плоский” випадок, представлений на рис . 8.
Визначення координат споживача
Кожен супутник можна у вигляді точкового випромінювача. І тут фронт електромагнітної хвилі буде сферичним. Точкою перетину двох сфер буде та, де знаходиться споживач.
Висота орбіт супутників становить 20000 км. Отже, другу точку перетину кіл можна відкинути через апріорні відомості, оскільки вона знаходиться далеко в космосі.
Диференційний режим
Супутникові навігаційні системи дозволяють споживачеві отримати координати з точністю близько 10-15 м. Однак для багатьох завдань, особливо для навігації в містах, потрібна більша точність. Один із основних методів підвищення точності визначення місцезнаходження об'єкта заснований на застосуванні відомого в радіонавігації принципу диференціальних навігаційних вимірів.
Диференціальний режим DGPS (Differential GPS) дозволяє встановити координати з точністю до 3 м у динамічній навігаційній обстановці та до 1 м – у стаціонарних умовах. Диференціальний режим реалізується за допомогою контрольного приймача GPS, званого опорною станцією. Вона знаходиться в пункті з відомими координатами, в тому ж районі, що і основний GPS-приймач. Порівнюючи відомі координати (отримані в результаті прецизійної геодезичної зйомки) з виміряними, опорна станція обчислює поправки, які передаються споживачам по радіоканалу заздалегідь обумовленому форматі.
Апаратура споживача приймає від опорної станції диференціальні поправки та враховує їх щодо місцезнаходження споживача.
Результати, отримані за допомогою диференціального методу, значною мірою залежать від відстані між об'єктом та опорною станцією. Застосування цього найефективніше, коли переважними є систематичні помилки, зумовлені зовнішніми (стосовно приймача) причинами. За експериментальними даними, опорну станцію рекомендується розташовувати не далі 500 км від об'єкта.
В даний час існує безліч широкозонних, регіональних і локальних диференціальних систем.
Як широкозонні варто відзначити такі системи, як американська WAAS, європейська EGNOS і японська MSAS. Ці системи використовують геостаціонарні супутники передачі поправок всім споживачам, що у зоні їх покриття.
Регіональні системи призначені для навігаційного забезпечення окремих ділянок земної поверхні. Зазвичай регіональні системи використовують у великих містах, на транспортних магістралях та судноплавних річках, у портах та березі морів та океанів. Діаметр робочої зони регіональної системизазвичай становить від 500 до 2000 км. Вона може мати у своєму складі одну або декілька опорних станцій.
Локальні системи мають максимальний радіус дії від 50 до 220 км. Вони зазвичай включають одну базову станцію. Локальні системи зазвичай поділяють за способом їх застосування: морські, авіаційні та геодезичні локальні диференціальні станції.
Розвиток супутникової навігації
Загальний напрямок модернізації обох супутникових систем GPS та Глонасс пов'язаний з підвищенням точності навігаційних визначень, покращенням сервісу, що надається користувачам, підвищенням терміну служби та надійністю бортової апаратури супутників, покращенням сумісності з іншими радіотехнічними системами та розвитком диференціальних підсистем. Загальний напрямок розвитку систем GPS і Глонасс збігається, але динаміка та досягнуті результати сильно відрізняються.
Удосконалення системи ГЛОНАСС планується здійснювати з урахуванням супутників нового покоління “ГЛОНАСС-М”. Цей супутник матиме збільшений ресурс служби і випромінюватиме навігаційний сигнал в діапазоні L2 для цивільних застосувань.
Аналогічне рішення було прийнято в США, де 5 січня 1999 оголошено про виділення 400 млн. дол. на модернізацію системи GPS, пов'язану з передачею C/A-коду на частоті L2 (1222,7 МГц) і введенням третьої несучої L3 (1176, 45 МГц) на КА, які запускатимуться з 2005 року. Сигнал на частоті L2 намічено використовувати для цивільних потреб, не пов'язаних безпосередньо з небезпекою життя людей. Пропонується розпочати реалізацію цього рішення з 2003 року. Третій цивільний сигнал на частоті L3 вирішено використовуватиме потреб цивільної авіації.
Список скорочень
АКНП – апаратура контролю навігаційного поля
АКС – бортова апаратура командної системи
АСЧ – атомні стандарти частоти
БІС – беззапитова вимірювальна станція
БВК - бортовий обчислювальний комплекс
БНП - бортовий навігаційний передавач
БТС – бортова телеметрична система
БУ – блок управління
БУК - бортовий керуючий комплекс
БХ - бортовий хронізатор
БЦ – балістичний центр
БШВ – бортова ШВ
ГВМ – габаритно-ваговий макет
СРНС – супутникова радіонавігаційна система
ДН - діаграма спрямованості
ЄС КВО – Єдина глобальна системакоординатно-часового забезпечення
ЗІС – запитальна вимірювальна станція
ЗРВ – зона радіовидимості
КА – космічний апарат
КІС – командно-вимірювальна станція
КОС – кванто-оптичні станції
КС - контрольні станції
ЛДПС – локальна диференціальна підсистема
МБР – міжконтинентальна балістична ракета
МВ - мітка часу
НАП – навігаційна апаратура споживачів
НКА - навігаційний КА
ПКУ – наземний комплекс управління
НСВТ - навігаційний згін високої точності
НССТ - навігаційний сигнал середньої точності
ОГ - орбітальне угруповання
ПСП – псевдовипадкова послідовність
ПКУ - підсистеми контролю та управління
РВСП – ракетні війська стратегічного призначення
СК – система корекції
СКФ – система контролю фаз
СО - система орієнтації та стабілізації
СК – система корекції
СЕП - система електроживлення
ФМ – фазова маніпуляція
ЧВО – частотно-часове забезпечення
ЧВП - частотно-тимчасова поправка
ЦІ – цифрова інформація
ЦС -центральний синхронізатор
ЦУС – центр управління системою ГЛОНАСС
ШВ – шкала часу
ЕІ – ефемеридна інформація
ЕО-ефемеридне забезпечення
UTC – координований всесвітній час
Використовувана література
1. Радіотехнічні системи. За ред. Казарінова Ю.М. М: Вища школа, 1990.
2. Соловйов Ю.А. Системи супутникової навігації. М: Еко-Трендз, 2000.
3. Глобальна супутникова радіонавігаційна система ГЛОНАСС/За ред. В.М. Харісова, А.І. Перова, В.А. Болдіна. М.: ІПРЖР, 1998.
4. Липкін І.А. Супутникові навігаційні системи. М: Вузовська книга, 2001.
5. Глобальна навігаційна супутникова система ГЛОНАСС. Інтерфейсний контрольний документ М.: КНИЦЬ ВКС, 1995.