Système mondial de navigation par satellite GNSS. Système mondial de navigation par satellite (GLONASS)
E. Povalyaev, S. Khutornoy
Systèmes navigation par satellite GLONASS et GPS.
Nous portons à votre attention un article consacré aux systèmes de radionavigation par satellite Glonass (système global de navigation). système satellite) et GPS (Global Positioning System). L'article traite des questions de construction et de fonctionnement des systèmes, de la structure et des fonctions des équipements grand public (récepteurs), des algorithmes de résolution du problème de navigation et des perspectives de développement des systèmes.
Au contraire, Galileo doit être civil. Le projet sera situé à Prague. Le projet porte le nom du scientifique toscan Galileo Galilei, également intéressé par les problèmes de la navigation maritime. Cependant, à partir de ce modèle financier, les investisseurs ont renoncé à trop de risques.
Service de base - le signal de base est fourni gratuitement. Ce service sera développé pour les communautés de transport critiques telles que l'aviation. Il sera certifié conformément aux normes internationales de l'Organisation de l'aviation civile internationale et aux règles de ciel ouvert. Service commercial - contrairement au service de base, utilise deux signaux supplémentaires. L'accès est contrôlé au niveau du récepteur, où une clé d'accès est utilisée. Le service est destiné exclusivement aux utilisateurs désignés par le gouvernement.
Depuis l'Antiquité, les voyageurs se demandent : comment déterminer leur emplacement sur Terre ? Les anciens navigateurs étaient guidés par les étoiles indiquant le sens du déplacement : connaissant la vitesse moyenne et le temps de parcours, il était possible de s'orienter dans l'espace et de déterminer la distance jusqu'à la destination finale. Cependant, les conditions météorologiques n'étaient pas toujours entre les mains des chercheurs, il n'était donc pas difficile de s'écarter du parcours. Avec l'avènement de la boussole, la tâche s'est grandement simplifiée. Le voyageur était déjà moins dépendant de la météo.
De plus, il doit fournir la possibilité d'appeler l'aide d'urgence. Chacun des plans sera à 56° avec le plan de l'équateur, ce qui facilitera la navigation dans le système de navigation jusqu'à 75° de latitude. Un grand nombre de satellites, dont trois effectueront sauvegarde, assurer un fonctionnement fiable du système même si certains satellites cessent de fonctionner correctement.
En fait, le signal satellite ne disparaît pas simplement entre les bâtiments, dans des espaces confinés, dans la forêt, sous terre ou sous la mer - ce serait la première chose qui sortirait de nos vies face à une crise internationale majeure. Des dirigeables aux sous-marins nucléaires.
L'ère de la radio a ouvert de nouvelles possibilités à l'homme. Avec l'avènement des stations radar, lorsqu'il est devenu possible de mesurer les paramètres de mouvement et la position relative d'un objet par le faisceau radar réfléchi par sa surface, la question s'est posée de la possibilité de mesurer les paramètres de mouvement d'un objet à partir du signal émis . En 1957, en URSS, un groupe de scientifiques dirigé par V.A. Kotelnikova a confirmé expérimentalement la possibilité de déterminer les paramètres de mouvement d'un satellite terrestre artificiel (AES) sur la base des résultats de mesures du décalage de fréquence Doppler du signal émis par ce satellite. Mais, plus important encore, la possibilité de résoudre le problème inverse a été établie - trouver les coordonnées du récepteur à partir du décalage Doppler mesuré du signal émis par le satellite, si les paramètres de mouvement et les coordonnées de ce satellite sont connus. Lorsqu'il se déplace en orbite, le satellite émet un signal d'une certaine fréquence, dont la valeur est connue côté réception (consommateur). La position du satellite à chaque instant est connue, plus précisément, elle peut être calculée à partir des informations contenues dans le signal satellite. L'utilisateur, mesurant la fréquence du signal qui lui est parvenu, le compare à celui de référence et calcule ainsi le décalage de fréquence Doppler dû au mouvement du satellite. Les mesures sont faites en continu, ce qui permet de composer une sorte de fonction de changement de fréquence Doppler. A un certain moment, la fréquence devient égale à zéro, puis change de signe. Au moment où la fréquence Doppler est égale à zéro, le consommateur se trouve sur une ligne normale au vecteur mouvement du satellite. En utilisant la dépendance de la pente de la courbe de fréquence Doppler à la distance entre le consommateur et le satellite, et en mesurant l'instant où la fréquence Doppler est nulle, il est possible de calculer les coordonnées du consommateur.
Histoire systèmes de navigation plus vieux qu'il n'y paraît à première vue : ils sont nés pendant la Première Guerre mondiale pour les besoins des commandants des dirigeables allemands bombardant les nuits noires de l'Angleterre. A ce moment, deux stations éloignées l'une de l'autre diffusent un signal dont la transmission de l'une indique la direction, et le second signal croise le premier à un certain angle au-dessus de l'emplacement cible.
Précision du système de navigation. Le problème avec la navigation inertielle est que sa précision se dégrade rapidement avec le temps depuis l'échec du signal satellite. Peu à peu, il s'est amélioré et a commencé à disparaître avec l'avènement des satellites. Récemment, il s'y est intéressé - notamment dans le contexte des risques de sécurité. Cependant, les systèmes radio terrestres ne sont pas très précis et un grand nombre d'émetteurs et de tours de transmission sont nécessaires pour couvrir de vastes zones. Par conséquent, ils sont chers et, de plus, relativement vulnérables.
De cette façon, satellite artificiel La Terre devient une station de référence de radionavigation, dont les coordonnées changent dans le temps en raison du mouvement du satellite en orbite, mais peuvent être calculées à l'avance à tout moment grâce aux informations d'éphémérides intégrées dans le signal de navigation du satellite.
En 1958√1959 à l'Académie d'ingénierie de l'armée de l'air de Leningrad (LVVIA). UN F. Mozhaisky, l'Institut d'astronomie théorique de l'Académie des sciences de l'URSS, l'Institut d'électromécanique de l'Académie des sciences de l'URSS, deux instituts de recherche marine et le Gorky NIRFI ont mené des recherches sur le thème "Spoutnik", qui est devenu plus tard la base pour la construction du premier système national de navigation par satellite en orbite basse "Cicada". Et en 1963, les travaux ont commencé sur la construction de ce système. En 1967, le premier satellite de navigation domestique Kosmos-192 a été lancé en orbite. Une caractéristique des systèmes de radionavigation par satellite de la première génération est l'utilisation de satellites en orbite basse et l'utilisation du signal d'un satellite actuellement visible pour mesurer les paramètres de navigation d'un objet. Par la suite, les satellites du système Cicada ont été équipés d'équipements de réception pour détecter les objets en détresse.
Il s'agit d'un appareil doté d'une horloge très précise et d'un ensemble d'accéléromètres et de gyroscopes. Il fonctionne en mémorisant la dernière position exacte connue, définie différemment, à partir de laquelle des accéléromètres mesurent la vitesse et des gyroscopes dans le sens de la marche. Par conséquent, les appareils qui fonctionnent avec ordinateur puissant, peuvent communiquer à tout moment indépendamment des sources de signal externes.
Les systèmes de navigation inertielle ont commencé à être utilisés principalement sur les sous-marins nucléaires au cours du siècle dernier. Ils étaient complexes, volumineux, dérangeants et peu précis. Le principal inconvénient de ces systèmes était que les erreurs et les écarts s'accumulaient progressivement et, sans corrections fréquentes, les résultats devenaient inutilisables après un certain temps.
Parallèlement à cela, après le lancement réussi du premier satellite terrestre artificiel par l'URSS, des travaux sont menés aux USA au Laboratoire de Physique Appliquée de l'Université Johns Hopkins concernant la possibilité de mesurer les paramètres du signal émis par le satellite. Les mesures sont utilisées pour calculer les paramètres du mouvement du satellite par rapport au point d'observation au sol. La solution du problème inverse est une question de temps.
Carte indépendante de la taille des pièces. L'appareil ne se présente plus sous la forme d'un gros boîtier nécessitant une forte source d'alimentation, mais d'une puce de la taille d'une petite pièce de monnaie. Il se compose de six couches, chacune de 50 microns d'épaisseur, soit environ l'épaisseur d'un cheveu humain. Des circuits sont imprimés sur ces couches pour remplacer les accéléromètres et gyroscopes mécaniques volumineux et peu fiables qui étaient autrefois de 200 mW.
L'objectif des laboratoires de développement est la miniaturisation des systèmes inertiels. L'erreur après une mesure horaire est signalée comme étant inférieure à un mille marin. Les systèmes de navigation indépendants doivent également utiliser des sources supplémentaires d'informations de position, telles que le champ magnétique terrestre, les stations de radio et de télévision, les réseaux mobiles et même des tempêtes. Certaines sources parlent également d'émetteurs secrets spéciaux à courte portée qui seront déployés dans des zones d'intérêt.
Sur la base de ces études, en 1964, le système de radionavigation par satellite Doppler de première génération "Transit" a été créé aux États-Unis. Son objectif principal est le soutien à la navigation pour le lancement de missiles balistiques Polaris à partir de sous-marins. Le directeur du Laboratoire de physique appliquée R. Kershner est considéré comme le père du système. Le système est devenu disponible pour une utilisation commerciale en 1967. Tout comme dans le système Cicada, dans le système Transit, les coordonnées de la source sont calculées à partir du décalage de fréquence Doppler du signal de l'un des 7 satellites visibles. Les systèmes AES ont des orbites polaires circulaires avec une hauteur au-dessus de la surface de la Terre d'environ 1100 km, la période de révolution des satellites Transit est de 107 minutes. La précision du calcul des coordonnées de la source dans les systèmes de première génération dépend dans une large mesure de l'erreur de détermination de la vitesse de la source. Ainsi, si la vitesse d'un objet est déterminée avec une erreur de 0,5 m, cela entraînera à son tour une erreur dans la détermination des coordonnées d'environ 500 m.Pour un objet stationnaire, cette valeur diminue à 50 m.
Histoire de la navigation par satellite chinoise
Les détails ne sont pas donnés car les premiers systèmes de navigation inertielle seront militaires. Jusqu'à récemment, seuls les États-Unis et la Russie disposaient de leurs propres systèmes de navigation par satellite. La Chine a récemment rejoint ce groupe. En outre, il existe de nombreuses preuves que les Chinois achèveront leur système plus rapidement que les Européens. L'idée de créer une navigation par satellite chinoise est née au fil des années. Cependant, le véritable travail sur le système a commencé près de 20 ans plus tard. Il était composé de 4 satellites géostationnaires. Beidu-1 couvrait la région de l'Asie du Sud-Est.
De plus, un fonctionnement continu n'est pas possible dans ces systèmes. Du fait que les systèmes sont en orbite basse, le temps pendant lequel le satellite se trouve dans le champ de vision du consommateur ne dépasse pas une heure. De plus, le temps entre le passage des différents satellites dans la zone de visibilité de l'utilisateur dépend de latitude géographique sur lequel il se trouve, et peut être de 35 à 90 minutes. Réduire cet intervalle en augmentant le nombre de satellites n'est pas possible, car tous les satellites émettent des signaux à la même fréquence.
Actuellement, tous les satellites de ce système sont désactivés. Un soutien financier de 230 millions d'euros a même été proposé. Officiellement à cause du côté insatisfaisant de la coopération chinoise. Ce sera un système avec une couverture mondiale. Tous les systèmes de navigation par satellite actifs ont une conception à trois composants. Le système chinois ne fera pas exception. On retrouve ici segment spatial, utilisateur et contrôle.
Il y a actuellement 23 satellites en orbite, dont 3 ont été exclus. Le signal satellite sera transmis sur les fréquences suivantes. Il s'agit de différents types de stations au sol dont la tâche est d'assurer le bon fonctionnement du système. Les éléments les plus importants du segment de contrôle sont.
Par conséquent, les systèmes de navigation par satellite de deuxième génération présentent un certain nombre d'inconvénients importants. Tout d'abord, le manque de précision dans la détermination des coordonnées des objets dynamiques. Un autre inconvénient est le manque de continuité dans les mesures.
L'un des principaux problèmes qui se posent lors de la création de systèmes satellitaires fournissant des déterminations de navigation pour plusieurs satellites est la synchronisation mutuelle des signaux (échelles de temps) des satellites avec la précision requise. Une désadaptation des générateurs de référence des satellites de 10 ns conduit à une erreur dans la détermination des coordonnées du consommateur 10√15 m. Le deuxième problème auquel les développeurs ont été confrontés lors de la création de systèmes de navigation par satellite en orbite haute était la détermination et la prédiction de haute précision des paramètres d'orbite des satellites. L'équipement récepteur, en mesurant les retards des signaux de différents satellites, calcule les coordonnées du consommateur.
Station de contrôle principale - Responsable du maintien de la bonne constellation de satellites. Leur tâche est de recevoir en continu un signal satellite. . Stations envoyant la navigation au compas chinois. La navigation par satellite chinoise offrira deux niveaux de précision : publique et cryptée. Le signal codé sera destiné à l'armée chinoise. Probablement à l'avenir, cette technologie sera développée pour envoyer des messages plus longs.
Cela vous permettra de définir la position beaucoup plus rapidement, en particulier dans les zones urbaines et montagneuses. On estime que les entreprises chinoises gagneront 60 milliards de dollars américains supplémentaires au cours des cinq prochaines années. Navigation par satellite - un type de radionavigation utilisant les ondes radio de satellites artificiels, afin de déterminer l'emplacement des points et des récepteurs en mouvement ainsi que les paramètres de leur mouvement n'importe où sur la surface de la terre.
À ces fins, en 1967, la marine américaine a développé un programme qui a lancé le satellite TIMATION-I, et en 1969, le satellite TIMATION-II. Des oscillateurs à cristal ont été utilisés à bord de ces satellites. Au même moment, l'US Air Force exécutait son programme parallèle de code de pseudo-bruit (PRN) à large bande. Les propriétés de corrélation d'un tel code permettent d'utiliser une fréquence de signal pour tous les satellites, avec une séparation de code des signaux provenant de différents satellites. Plus tard, en 1973, les deux programmes ont été fusionnés en un seul sous le nom de "Navstar-GPS". En 1996, le déploiement du système était terminé. DANS ce moment 28 satellites actifs disponibles.
Types de systèmes de navigation par satellite
Dans les transports maritimes, routiers, aériens et ferroviaires, la navigation par satellite est utilisée pour identifier automatiquement les objets en mouvement, contrôler leurs itinéraires et avertir des dangers potentiels. Les deux systèmes fonctionnent sur le principe de la mesure passive de la distance entre le récepteur et les satellites. La méthode de mesure et le fonctionnement du système sont similaires.
Le système se compose de 30 satellites situés sur trois orbites circulaires. En Europe, deux centres seront mis en place pour surveiller le fonctionnement des satellites. Les clients commerciaux recevront un levé topographique avec une précision de 10 mètres et une vitesse de 0,2 mètre par seconde. Nous voyons comment cela fonctionne dans le schéma préparé par le fabricant. Dans les zones peuplées, le signal satellite atteint le récepteur à la fois directement et par réflexions - donc à des moments différents. Si les signaux se chevauchent, une bulle de signal est créée.
En URSS, les essais en vol du système de navigation par satellite en orbite haute Glonass ont commencé en 1982 avec le lancement du satellite Kosmos-1413. Le principal développeur et créateur du système dans son ensemble et du segment spatial est NPO Applied Mechanics (Krasnoyarsk) et pour les engins spatiaux de navigation - PA Polet (Omsk). Le principal développeur de complexes d'ingénierie radio est RNIIKP; L'Institut russe de radionavigation et de temps a été nommé responsable de la création d'un complexe temporaire, d'un système de synchronisation et d'équipements de navigation pour les consommateurs.
Le récepteur recherche son pic pour déterminer le moment réel de réception du signal - mais plus la bulle est informe, plus il est difficile d'obtenir une lecture précise, de sorte que la précision de la position calculée sera moindre. Par conséquent, le récepteur peut ignorer tous les signaux après la première réception dans une unité de temps donnée, reconnaissant avec une forte probabilité qu'il a reçu un signal direct. Pourquoi de telles décisions seulement maintenant ? Contrairement à apparence, il ne s'agit pas de progrès dans le domaine des semi-conducteurs, mais c'est aussi important. En fait, ce n'est que cette année que nous en avons reçu suffisamment pour les utiliser dans de telles conditions.
Système de radionavigation par satellite réseau (NRNSS) Glonass
Le système Glonass est conçu pour la navigation opérationnelle globale d'objets mobiles en surface. Le SRNSS a été développé sur ordre du ministère de la Défense. En termes de structure, Glonass, comme le GPS, est considéré comme un système à double action, c'est-à-dire qu'il peut être utilisé à la fois à des fins militaires et civiles.
Auparavant, il suffisait d'améliorer la précision des mesures pour les systèmes fonctionnant à l'extérieur, comme en mer ou dans les champs. Outre les fabricants de smartphones et de navigation automobile, les nouvelles puces seront certainement appréciées par les terroristes. On ne peut qu'imaginer comment une puissante arme terroriste serait guidée avec une précision allant jusqu'à 30 cm par des drones autonomes avion placés sur eux avec des explosifs. Dans certains cas, mieux que la solution cachée dans un fourgon de toit rétractable.
Cela conduira probablement à une prolifération de solutions similaires à celles utilisées à Moscou aujourd'hui. Système de positionnement global. 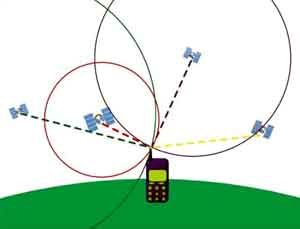

Système de positionnement global "Global Positioning System" est un système de navigation par satellite basé dans l'espace qui fournit des informations sur l'heure et le lieu, quelle que soit la météo, partout dans le monde ou là où il y a un champ de vision discret de quatre satellites ou plus. Le système offre des capacités importantes aux utilisateurs militaires, commerciaux et civils du monde entier.
Le système dans son ensemble comprend trois parties fonctionnelles (dans la littérature professionnelle, ces parties sont appelées segments) (Fig. 1).
Figure 1. Segments des systèmes de navigation en orbite haute Glonass et GPS
un segment spatial, qui comprend une constellation orbitale de satellites terrestres artificiels (en d'autres termes, des engins spatiaux de navigation) ;
L'Union soviétique a lancé le premier satellite artificiel Spoutnik en deux physiciens américains William Guiet et George Weiffenbach du Johns Hopkins Applied Physics Laboratory ont décidé de surveiller les transmissions radio par satellite. Au bout de quelques heures, ils ont réalisé que grâce à l'effet Doppler, ils pouvaient indiquer la position du satellite en orbite.
Il utilisait une constellation de cinq satellites et pouvait fournir une position mise à jour environ une fois par heure. Il est devenu pleinement opérationnel l'année de sa réception, crédité de son invention. Son libre accès par toute personne dans le monde est reconnu comme un droit et non comme un privilège. C'est actuellement le seul complètement système fonctionnel, constitué d'une constellation contenant 30 satellites.
segment de contrôle, complexe de contrôle au sol (GCC) de la constellation orbitale d'engins spatiaux ;
équipement de l'utilisateur du système.
De ces trois parties, la dernière, l'équipement utilisateur, est la plus nombreuse. Le système GLONASS est sans demande, donc le nombre de consommateurs du système n'a pas d'importance. En plus de la fonction principale - les définitions de navigation - le système permet une synchronisation mutuelle de haute précision des normes de fréquence et de temps sur des objets terrestres distants et un référencement géodésique mutuel. De plus, il peut être utilisé pour déterminer l'orientation d'un objet sur la base de mesures prises à partir de quatre récepteurs de signaux de satellite de navigation.
En raison de l'évolution rapide de la technologie et des normes militaires de plus en plus complexes, il est techniquement contourné. Le nouveau système disposera de satellites capables de transmettre un signal 500 fois plus puissant que les satellites actuels et apportera des améliorations significatives dans les applications militaires.
L'Inde représente une menace réelle et est même considérée comme un facteur déstabilisant dans la supériorité des systèmes de positionnement global. Dotée d'un budget de plus de 300 millions de dollars américains, elle vise à fournir des services de positionnement avec une couverture totale du territoire national à l'aide d'un réseau de 7 satellites.
Dans le système Glonass, les engins spatiaux de navigation (NSV) sont utilisés comme station de référence de radionavigation, tournant sur une orbite géostationnaire circulaire à une altitude d'environ 19100 km (Fig. 2). La période de révolution d'un satellite autour de la Terre est en moyenne de 11 heures 45 minutes. La durée de fonctionnement du satellite est de ≈ 5 ans, période pendant laquelle les paramètres de son orbite ne doivent pas différer des valeurs nominales de plus de 5%. Le satellite lui-même est un conteneur hermétique d'un diamètre de 1,35 m et d'une longueur de 7,84 m, à l'intérieur duquel sont placés divers types d'équipements. Tous les systèmes sont alimentés par panneaux solaires. La masse totale du satellite est de 1415 kg. L'équipement embarqué comprend: un émetteur de navigation embarqué, une minuterie (horloge), un complexe de contrôle embarqué, un système d'orientation et de stabilisation, etc.
Figure 2. Segment spatial des systèmes GLONASS et GPS
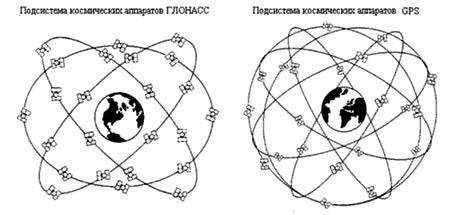
Figure 3. Segment du complexe de contrôle au sol du système GLONASS
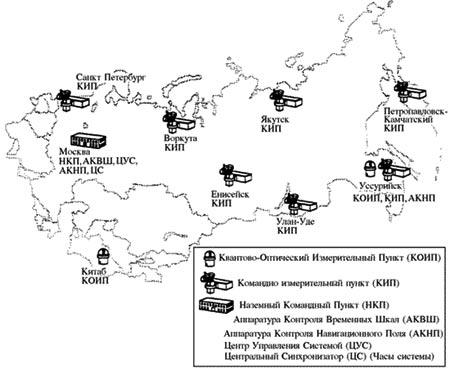
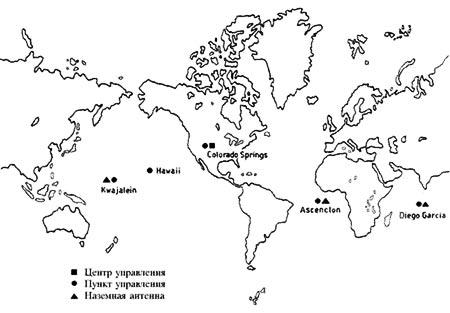
Figure 4. Segment du complexe de contrôle au sol Systèmes GPS
Le segment du complexe de contrôle au sol du système GLONASS remplit les fonctions suivantes :
prise en charge des éphémérides et temps-fréquence ;
surveillance de terrain de radionavigation ;
surveillance radiotélémétrique du NSC ;
commande et contrôle radio logiciel du NSC.
Pour synchroniser avec la précision requise les échelles de temps des différents satellites, des étalons de fréquence au césium présentant une instabilité relative de l'ordre de 10-13 sont utilisés à bord du NSC. Le complexe de contrôle au sol utilise un étalon d'hydrogène avec une instabilité relative de 10-14. De plus, le GCC comprend des moyens pour corriger les échelles de temps des satellites par rapport à l'échelle de référence avec une erreur de 3√5 ns.
Le segment sol fournit un support d'éphémérides pour les satellites. Cela signifie que les paramètres de déplacement du satellite sont déterminés au sol et que les valeurs de ces paramètres sont prédites pour une période de temps prédéterminée. Les paramètres et leur prévision sont inclus dans le message de navigation transmis par le satellite avec la transmission du signal de navigation. Cela inclut également les corrections temps-fréquence de l'échelle de temps à bord du satellite par rapport au temps système. La mesure et la prédiction des paramètres de mouvement du satellite sont effectuées dans le centre balistique du système sur la base des résultats des mesures de trajectoire de la distance au satellite et de sa vitesse radiale.
Système de radionavigation par satellite réseau GPS
Le système GPS américain est similaire dans sa fonctionnalité au système Glonass domestique. Son objectif principal est une détermination de haute précision des coordonnées du consommateur, des composants du vecteur de vitesse et de la liaison à l'échelle de temps du système. Semblable au système national, le système GPS a été développé pour le département américain de la Défense et est sous son contrôle. Selon le document de contrôle d'interface, les principaux développeurs du système sont :
pour le segment spatial - Rockwell International Space Division, Martin Marietta Astro Space Division;
dans le segment de la gestion - IBM, Federal System Company ;
par segment de consommateurs - Rockwell International, Collins Avio-nics & Communication Division.
Comme le système Glonass, le GPS consiste en segment spatial, complexe de commande et de mesure au sol et segment grand public.
Comme mentionné ci-dessus, la constellation GPS se compose de 28 engins spatiaux de navigation. Tous sont sur des orbites circulaires avec une période de révolution autour de la Terre, égale à 12 heures. La hauteur de l'orbite de chaque satellite est d'environ 20 000 km. Les NSC du système GPS ont subi un certain nombre d'améliorations qui ont affecté leurs performances en général. En tableau. 1 sont donnés brèves caractéristiques vaisseau spatial utilisé dans le système.
Tableau 1. Caractéristiques des engins spatiaux utilisés dans le système GPS
|
Masse en orbite |
Puissance des sources d'énergie, W |
Durée estimée d'existence active |
Année de lancement du premier NSC |
|
Tableau 2. Caractéristiques comparatives des systèmes GLONASS et GPS
|
Indicateur | ||
|
Nombre d'engins spatiaux au total constellation orbitale | ||
|
Nombre de plans orbitaux | ||
|
Nombre de vaisseaux spatiaux dans chaque avion | ||
|
Inclinaison orbitale | ||
|
Hauteur de l'orbite, km | ||
|
Période orbitale des satellites |
11h15. 44 s |
11 h 58 min. 00 s |
|
Système de coordonnées | ||
|
Poids du vaisseau spatial de navigation, kg | ||
|
Puissance des panneaux solaires, W | ||
|
Durée d'existence active, années | ||
|
Moyens de lancement d'un vaisseau spatial en orbite |
"Proton-K/DM" | |
|
Le nombre de vaisseaux spatiaux qui sont affichés dans un lancement | ||
|
spatioport |
Baïkonour (Kazakhstan) |
Cap Canaveral |
|
Temps de référence | ||
|
Méthode d'accès | ||
|
Fréquence porteuse : L1 L2 |
1598.0625≈1604.25 7/9 L1 |
1575.42 60/77 L1 |
|
Polarisation |
main droite |
main droite |
|
Type de séquence PN |
séquence m |
code d'or |
|
Nombre d'éléments de code : C/A P | ||
|
Taux d'encodage, Mbps : C/A P | ||
|
Niveau d'interférence radio intrasystème, dB | ||
|
Structure des messages de navigation |
||
|
Taux de transfert, bps | ||
|
Type de modulation |
BPSK (Manchester) | |
|
Longueur de supertrame, min. |
2,5 (5 images) |
12,5 (25 images) |
|
Longueur de trame, s |
30 (15 lignes) |
30 (5 lignes) |
|
Longueur de ligne, s | ||
Lors de la conception du système dans son ensemble et du SV en particulier, une grande attention est accordée aux problèmes de fonctionnement autonome. Ainsi, l'engin spatial de première génération (Bloc-I) a assuré le fonctionnement normal du système (c'est-à-dire sans erreurs significatives dans la détermination des coordonnées) sans l'intervention du segment de contrôle pendant 3√4 jours. Dans les appareils Block-II, cette période a été étendue à 14 jours. DANS nouvelle modification NSC Block-IIR permet un fonctionnement autonome pendant 180 jours sans ajuster les paramètres d'orbite depuis le sol, en utilisant uniquement un complexe autonome pour la synchronisation mutuelle des satellites. Les appareils Block-IIF sont censés être utilisés à la place du Block-IIR utilisé.
La structure des signaux radio de navigation du système Glonass
Le système Glonass utilise la division de fréquence des signaux (FDMA) émis par chaque satellite - deux signaux modulés par déplacement de phase. La fréquence du premier signal se situe dans la plage L1 ~ 1600 MHz, et la fréquence du second signal se situe dans la plage L2 ~ 1250 MHz. Notes de fonctionnement fréquences radio transmis dans les gammes L1 et L2 sont déterminés par l'expression :
f k1 = f 1 + kf 1 f k2 = f 2 + kf 2 k = 0,1,...,24, (1)
où k = 0,1,...,24 - nombre de lettres (canaux) des fréquences de fonctionnement des satellites ;
f1 = 1602 MHz f1 = 9/16 = 0,5625 MHz; f2 = 1246 MHz f2 = 7/16 = 0,4375 MHz.
Pour chaque satellite, les fréquences de fonctionnement des signaux dans les bandes L1 et L2 sont cohérentes et sont formées à partir d'une référence de fréquence. Le rapport des fréquences de fonctionnement de la porteuse de chaque satellite :
fk1 /fk2 = 7/9.
La valeur nominale de la fréquence du générateur embarqué, du point de vue d'un observateur situé à la surface de la Terre, est de 5,0 MHz.
Dans la gamme L1, chaque satellite du système Glonass émet 2 porteuses à la même fréquence, décalées l'une par rapport à l'autre en phase de 90º (Fig. 5).
Figure 5. Diagramme vectoriel des signaux porteurs GLONASS et GPS
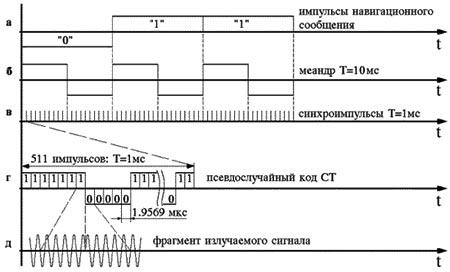
L'une des porteuses subit une modulation par déplacement de phase de 180º. Le signal modulant est obtenu par addition modulo 2 de trois signaux binaires (Fig. 6) :
un code de télémétrie grossier transmis à un débit de 511 Kbit/s (Fig. 6c);
des séquences de données de navigation transmises à un débit de 50 bit/s (Fig. 6a) ;
oscillation de méandre transmise à un débit de 100 bit/s (Fig. 6b).
Figure 6. La structure du signal GLONASS
Le signal dans la plage L1 (similaire au code C/A dans le GPS) est disponible pour tous les utilisateurs dans la plage de visibilité de l'engin spatial. Le signal dans la bande L2 est destiné aux besoins militaires, et sa structure n'est pas divulguée.
Composition et structure des messages de navigation des satellites du système Glonass
Le message de navigation est formé sous la forme de lignes se suivant en continu, chacune d'une durée de 2 s. Dans la première partie de la chaîne (intervalle 1,7 s), les données de navigation sont transmises et dans la seconde (0,3 s) - le Time Mark. Il s'agit d'une séquence pseudo-aléatoire raccourcie composée de 30 symboles avec une fréquence d'horloge de 100 bps.
Les messages de navigation des satellites du système Glonass sont nécessaires aux consommateurs pour les définitions de navigation et la planification des sessions de communication avec les satellites. Selon leur contenu, les messages de navigation sont divisés en informations opérationnelles et non opérationnelles.
Les informations opérationnelles font référence au satellite dont le signal a été reçu. Les informations opérationnelles comprennent :
numérisation des horodatages ;
différence relative de la fréquence porteuse du satellite par rapport à la valeur nominale ;
informations sur les éphémérides.
Le temps de liaison des informations d'éphémérides et les corrections fréquence-temps, qui ont une multiplicité d'une demi-heure à partir du début de la journée, permettent de déterminer avec précision les coordonnées géographiques et la vitesse du satellite.
Les informations non opérationnelles contiennent un almanach comprenant :
des données sur l'état de tous les satellites du système ;
décalage de l'échelle de temps du satellite par rapport à l'échelle du système ;
paramètres des orbites de tous les satellites du système ;
correction à l'échelle de temps du système Glonass.
Le choix de la "constellation" optimale de l'engin spatial et la prédiction du décalage Doppler de la fréquence porteuse sont fournis par l'analyse de l'almanach du système.
Les messages de navigation des satellites du système Glonass sont structurés sous forme de supertrames d'une durée de 2,5 minutes. Une supertrame se compose de cinq trames d'une durée de 30 s. Chaque trame contient 15 lignes d'une durée de 2 s. Sur les 2 s de durée de la ligne, les 0,3 dernières s sont occupées par l'horodatage. Le reste de la ligne contient 85 symboles d'informations numériques transmises à une fréquence de 50 Hz.
Dans le cadre de chaque trame, la quantité totale d'informations opérationnelles et une partie de l'almanach du système sont transmises. L'almanach complet est contenu dans toute la supertrame. Dans ce cas, l'information de supertrame contenue dans les lignes 1√4 se rapporte au satellite dont elle provient (partie opérationnelle) et n'évolue pas à l'intérieur de la supertrame.
La structure des signaux radio de navigation du système GPS
Le système GPS utilise la signalisation par répartition en code (CDMA), de sorte que tous les satellites émettent des signaux à la même fréquence. Chaque satellite GPS émet deux signaux modulés par déplacement de phase. La fréquence du premier signal est L1 = 1575,42 MHz et la seconde - L2 = 1227,6 MHz. Le signal porteur L1 est modulé par deux séquences binaires formées chacune par sommation modulo 2 du code de télémétrie et des données système et de navigation transmises, générées à un débit de 50 bit/s. A la fréquence L1, deux composantes en quadrature sont transmises, manipulées biphasiquement avec des séquences binaires. La première séquence est la somme modulo 2 du code de télémétrie précise P ou du code secret Y et des données de navigation. La deuxième séquence est également la somme modulo 2 du code C/A grossier (ouvert) et de la même séquence de données de navigation.
Le signal radio à la fréquence L2 est manipulé biphasiquement par une seule des deux séquences précédemment considérées. Le choix de la séquence de modulation s'effectue sur commande depuis la Terre.
Chaque satellite utilise ses propres codes de télémétrie C/A et P(Y), ce qui permet de séparer les signaux satellites. Lors du processus de formation d'un code P(Y) de télémétrie précis, des horodatages de signal satellite sont formés simultanément.
Composition et structure des messages de navigation des satellites GPS
La division structurelle des informations de navigation des satellites GPS s'effectue en supertrames, trames, sous-trames et mots. Une supertrame est formée de 25 trames et dure 750 s (12,5 min). Une trame est transmise toutes les 30 secondes et a une taille de 1500 bits. La trame est divisée en 5 sous-trames de 300 bits et est transmise sur un intervalle de 6 s. Le début de chaque sous-trame désigne un horodatage correspondant au début/à la fin de l'intervalle de 6 s suivant de l'heure du système GPS. Une sous-trame est constituée de 10 mots de 30 bits. Dans chaque mot, les 6 bits les moins significatifs sont les bits de contrôle.
Dans les 1ère, 2ème et 3ème sous-trames, des données sur les paramètres de correction d'horloge et des données d'éphéméride de l'engin spatial avec lequel la communication est établie sont transmises. Le contenu et la structure de ces sous-trames restent les mêmes sur toutes les pages de la super-trame. Les 4e et 5e sous-trames contiennent des informations sur la configuration et l'état de tous les SC du système, les almanachs des SC, les messages spéciaux, les paramètres décrivant la relation entre l'heure GPS et l'UTC, etc.
Algorithmes de réception et de mesure des paramètres des signaux de radionavigation par satellite
Le segment des consommateurs de systèmes GPS et GLONASS comprend les récepteurs de signaux satellites. En mesurant les paramètres de ces signaux, le problème de navigation est résolu. Le récepteur peut être divisé en trois parties fonctionnelles :
partie radiofréquence ;
corrélateur numérique ;
CPU.
A partir de la sortie du dispositif d'alimentation d'antenne (antenne), le signal entre dans la partie radiofréquence (Fig. 7). La tâche principale de cette partie est d'amplifier le signal d'entrée, le filtrage, la conversion de fréquence et la conversion analogique-numérique. De plus, de la partie radiofréquence du récepteur provient fréquence d'horloge pour la partie numérique du récepteur. A partir de la sortie de la partie radiofréquence, les échantillons numériques du signal d'entrée sont amenés à l'entrée du corrélateur numérique.
Figure 7. Structure généralisée du récepteur
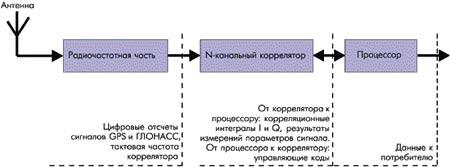
Dans le corrélateur, le spectre du signal est transféré à la fréquence "zéro". Cela se fait en multipliant le signal d'entrée du corrélateur par la forme d'onde harmonique de référence dans les canaux en phase et en quadrature. En outre, le résultat de la multiplication subit un traitement de corrélation en multipliant avec le code de télémétrie de référence et en s'accumulant sur la période du code de télémétrie. En conséquence, nous obtenons les intégrales de corrélation I et Q. Les lectures des intégrales de corrélation sont transmises au processeur pour un traitement ultérieur et la fermeture des boucles PLL (boucle à verrouillage de phase) et CVD (circuit de suivi de retard). Les mesures des paramètres du signal dans le récepteur ne sont pas effectuées directement à partir du signal d'entrée, mais à partir de sa copie exacte formée par les systèmes PLL et CV. Les intégrales de corrélation I et Q permettent d'estimer le degré de « similarité » (corrélation) entre les signaux de référence et d'entrée. La tâche du corrélateur, outre la formation des intégrales I et Q, est de former un signal de référence en fonction des actions de contrôle (codes de contrôle) provenant du processeur. De plus, dans certains récepteurs, le corrélateur génère les mesures nécessaires des signaux de référence et les transfère au processeur pour un traitement ultérieur. En même temps, étant donné que les signaux de référence dans le corrélateur sont formés en fonction des codes de contrôle provenant du processeur, les mesures nécessaires des signaux de référence peuvent être effectuées directement dans le processeur, en traitant les codes de contrôle de manière appropriée, c'est-à-dire fait dans de nombreux récepteurs modernes.
Quels paramètres de signal sont mesurés par le corrélateur (processeur) ?
La gamme des mesures d'ingénierie radio est caractérisée par le temps de propagation du signal de l'objet de mesure au point de mesure. Dans les systèmes de navigation GPS/GLONASS, l'émission de signaux est synchronisée avec l'échelle de temps du système, plus précisément avec l'échelle de temps du satellite émettant ce signal. En même temps, l'utilisateur dispose d'informations sur l'écart entre l'échelle de temps du satellite et du système. Les informations numériques transmises par le satellite vous permettent de définir le moment d'émission d'un certain fragment du signal (horodatage) par le satellite en temps système. L'instant de réception de ce fragment est déterminé par l'échelle de temps du récepteur. L'échelle de temps du récepteur (consommateur) est formée à l'aide d'étalons de fréquence à quartz, il y a donc une "sortie" constante de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. La différence entre l'instant de réception d'un fragment de signal, compté sur l'échelle de temps du récepteur, et l'instant d'émission par son satellite, compté sur l'échelle du satellite, multiplié par la vitesse de la lumière, est appelée pseudodistance. Pourquoi pseudorange ? Parce qu'il diffère de la vraie distance d'une quantité égale au produit de la vitesse de la lumière et de la "déviation" de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. Lors de la résolution d'un problème de navigation, ce paramètre est déterminé avec les coordonnées du consommateur (récepteur).
Des intégrales de corrélation formées dans le corrélateur permettent de suivre la modulation du signal satellite par des symboles d'information et de calculer l'horodatage dans le signal d'entrée. Les horodatages suivent à des intervalles de 6 s pour le GPS et de 2 s pour le GLONASS et forment une sorte d'échelle de 6(2) secondes. Dans une division de cette échelle, les périodes du code de télémétrie forment une échelle de 1 ms. Une milliseconde est divisée, à son tour, en éléments distincts (puces, dans la terminologie GPS): pour GPS - 1023, pour GLONASS - 511. Ainsi, les éléments du code de télémétrie vous permettent de déterminer la distance au satellite avec une erreur de ~ 300 m Pour une détermination plus précise, il est nécessaire de connaître la phase du générateur de code de télémétrie. Les schémas de construction des générateurs de référence du corrélateur permettent de déterminer sa phase avec une précision allant jusqu'à 0,01 période, soit une précision de détermination de la pseudo-distance de 3 m.
Sur la base des mesures des paramètres de l'oscillation harmonique de référence générée par le système PLL, la fréquence et la phase de l'oscillation porteuse du satellite sont déterminées. Son écart par rapport à la valeur nominale donnera un décalage de fréquence Doppler, par lequel la vitesse du consommateur par rapport au satellite est estimée. De plus, les mesures de phase de la porteuse permettent d'affiner la distance au satellite avec une erreur de quelques mm.
Détermination des coordonnées du consommateur
Pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible. Afin que le consommateur puisse déterminer les coordonnées des satellites, les signaux de navigation émis par ceux-ci sont modélisés par des messages sur les paramètres de leur mouvement. Dans l'équipement du consommateur, ces messages sont sélectionnés et les coordonnées des satellites sont déterminées à l'instant souhaité.
Les coordonnées et les composants du vecteur vitesse changent très rapidement, par conséquent, les messages sur les paramètres de mouvement des satellites contiennent des informations non pas sur leurs coordonnées et les composants du vecteur vitesse, mais des informations sur les paramètres d'un certain modèle se rapprochant de la trajectoire de mouvement SC sur un intervalle de temps suffisamment long (environ 30 minutes). Les paramètres du modèle d'approximation changent assez lentement et peuvent être considérés comme constants sur l'intervalle d'approximation.
Les paramètres du modèle d'approximation sont inclus dans les messages de navigation par satellite. Le système GPS utilise le modèle de mouvement képlérien avec des éléments osculateurs. Dans ce cas, la trajectoire de vol de l'engin spatial est divisée en segments d'approximation d'une durée d'une heure. Au centre de chaque section, un point clé dans le temps est défini, dont la valeur est signalée au consommateur d'informations de navigation. De plus, le consommateur est informé des paramètres du modèle des éléments osculateurs au point nodal dans le temps, ainsi que des paramètres des fonctions se rapprochant des changements des paramètres du modèle des éléments osculateurs dans le temps à la fois précédant l'élément nodal et le suivant.
Dans l'équipement du consommateur, un intervalle de temps est alloué entre l'instant pour lequel il faut déterminer la position du satellite et l'instant nodal. Ensuite, à l'aide des fonctions d'approximation et de leurs paramètres extraits du message de navigation, les valeurs des paramètres du modèle des éléments osculateurs sont calculées à l'instant souhaité. A la dernière étape, en utilisant les formules usuelles du modèle képlérien, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées.
Le système Glonass utilise des modèles de mouvement différentiel pour déterminer la position exacte d'un satellite. Dans ces modèles, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées par l'intégration numérique des équations différentielles du mouvement de l'engin spatial, qui prennent en compte un nombre fini de forces agissant sur l'engin spatial. Les conditions d'intégration initiales sont fixées à l'instant nodal, qui est situé au milieu de l'intervalle d'approximation.
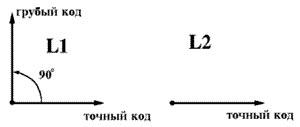
Comme mentionné ci-dessus, pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible, qui est déterminée dans le récepteur de navigation avec une précision d'environ 1 M. Pour plus de commodité, considérons le cas "plat" le plus simple illustré à la Fig. 8.
Figure 8. Détermination des coordonnées du consommateur
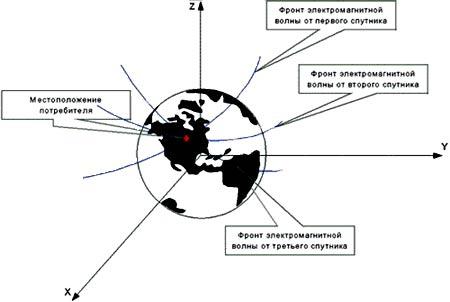
Chaque satellite (Fig. 8) peut être représenté comme un émetteur ponctuel. Dans ce cas, le front de l'onde électromagnétique sera sphérique. Le point d'intersection des deux sphères sera celui où se situe le consommateur.
La hauteur des orbites des satellites est d'environ 20 000 km. Par conséquent, le deuxième point d'intersection des cercles peut être écarté en raison d'une information a priori, puisqu'il est éloigné dans l'espace.
Mode différentiel
Les systèmes de navigation par satellite permettent au consommateur d'obtenir des coordonnées avec une précision d'environ 10√15 M. Cependant, pour de nombreuses tâches, en particulier pour la navigation dans les villes, une plus grande précision est requise. L'une des principales méthodes pour améliorer la précision de la détermination de la localisation d'un objet repose sur l'application du principe des mesures de navigation différentielle connu en radionavigation.
Le mode différentiel DGPS (GPS différentiel) vous permet de définir des coordonnées avec une précision allant jusqu'à 3 m dans un environnement de navigation dynamique et jusqu'à 1 m dans des conditions stationnaires. Le mode différentiel est mis en œuvre à l'aide d'un récepteur GPS de contrôle appelé station de référence. Il est situé en un point dont les coordonnées sont connues, dans la même zone que le récepteur GPS principal. En comparant les coordonnées connues (obtenues à la suite d'un levé géodésique de précision) avec celles mesurées, la station de référence calcule des corrections, qui sont transmises aux consommateurs via un canal radio dans un format prédéterminé.
L'équipement consommateur reçoit des corrections différentielles de la station de référence et les prend en compte lors de la détermination de la localisation du consommateur.
Les résultats obtenus avec la méthode différentielle dépendent largement de la distance entre l'objet et la station de référence. L'application de cette méthode est plus efficace lorsque des erreurs systématiques dues à des causes externes (par rapport au récepteur) prévalent. Selon les données expérimentales, il est recommandé de localiser la station de référence à moins de 500 km de l'objet.
Actuellement, il existe de nombreux systèmes différentiels régionaux et locaux à larges écarts.
En tant que systèmes à large portée, il convient de noter des systèmes tels que le WAAS américain, l'EGNOS européen et le MSAS japonais. Ces systèmes utilisent des satellites géostationnaires pour transmettre les corrections à tous les utilisateurs dans leur zone de couverture.
Les systèmes régionaux sont conçus pour fournir un support de navigation pour des sections individuelles de la surface de la terre. En règle générale, les systèmes régionaux sont utilisés dans les grandes villes, sur les autoroutes et les rivières navigables, dans les ports et le long des côtes des mers et des océans. Le diamètre de la zone de travail du système régional est généralement de 500 à 2000 km. Il peut comprendre une ou plusieurs stations de référence.
Les systèmes locaux ont une portée maximale de 50 à 220 km. Ils comprennent généralement une station de base. Les systèmes locaux sont généralement divisés en fonction de leur mode d'utilisation : stations différentielles locales marines, aéronautiques et géodésiques.
Développement de la navigation par satellite
L'orientation générale de la modernisation des systèmes satellitaires GPS et Glonass est associée à une augmentation de la précision des définitions de navigation, à une amélioration du service fourni aux utilisateurs, à une augmentation de la durée de vie et de la fiabilité des équipements embarqués par satellite, à une amélioration de la compatibilité avec d'autres systèmes d'ingénierie radio et le développement de sous-systèmes différentiels. La direction générale du développement des systèmes GPS et Glonass coïncide, mais la dynamique et les résultats obtenus sont très différents.
L'amélioration du système GLONASS devrait être réalisée sur la base des satellites de nouvelle génération GLONASS-M. Ce satellite aura une durée de vie accrue et émettra un signal de navigation dans la bande L2 pour des applications civiles.
Une décision similaire a été prise aux États-Unis, où le 5 janvier 1999, il a annoncé l'allocation de 400 millions de dollars pour la modernisation du système GPS associé à la transmission du code C / A à la fréquence L2 (1222,7 MHz) et l'introduction de la troisième porteuse L3 (1176, 45 MHz) sur les engins spatiaux qui seront lancés à partir de 2005. Le signal sur la fréquence L2 est prévu pour être utilisé à des fins civiles, non directement liées au danger pour la vie humaine. Il est proposé de commencer à mettre en œuvre cette solution à partir de 2003. Il a été décidé d'utiliser le troisième signal civil à la fréquence L3 pour les besoins de l'aviation civile.
Littérature
Systèmes d'ingénierie radio. Éd. Kazarinova Yu.M. Moscou : École supérieure, 1990.
Solovyov Yu.A. Systèmes de navigation par satellite. Moscou : Eco-Trends, 2000.
Système mondial de radionavigation par satellite GLONASS / Ed. V.N. Kharisova, A.I. Perova, V.A. Boldin. M. : IPRZhR, 1998.
Lipkin I.A. Systèmes de navigation par satellite. M. : Vuzovskaya kniga, 2001.
Système mondial de navigation par satellite GLONASS. Document de contrôle des interfaces. M. : TRICOTS VKS, 1995.
Document de contrôle d'interface : Segment spatial GPS NAVSTAR / Interfaces utilisateur de navigation (ICD-GPS-200).Rockwell Int. Corp. 1987.
Université de construction d'État de Rostov
Département de géodésie appliquée
Systèmes satellitaires Navigation GPS et Glonass
Complété par: goujon gr. PG-579 Veremchuk RV
Vérifié par: Yakovlev V. A
Rostov-sur-le-Don
introduction
En décembre 1976, le décret du Comité central du PCUS et du Conseil des ministres de l'URSS "Sur le déploiement du système unifié de navigation spatiale GLONASS (GLOBAL NAVIGATION Spoutnik System)" a été adopté. Cette résolution, en fait, n'a fait que légaliser le travail déjà commencé sur la création nouveau système et déterminé la procédure pour son développement et ses tests. Des propositions techniques pour le système GLONASS dans le cadre du vaisseau spatial 11F654 "Uragan" ont été élaborées au NPO Applied Mechanics (NPO PM) de Krasnoïarsk au début de 1976 et examinées par la commission interministérielle en août de la même année. Le système GLONASS représente la deuxième génération de systèmes nationaux de navigation par satellite. La création de ce système de navigation a été prédéterminée par les besoins de nouveaux consommateurs potentiels qui avaient besoin d'une liaison de haute précision de leur position dans le temps et dans l'espace. L'aviation, la marine, les véhicules terrestres, les engins spatiaux et les systèmes de combat spéciaux (en particulier les ICBM mobiles à moyenne et longue portée) ont agi en tant que tels consommateurs. L'exploitation réussie des systèmes de navigation par satellite en orbite basse par les utilisateurs maritimes a attiré une large attention sur la navigation par satellite. En 1976, le système de navigation et de communication Tsiklon-B a été adopté par l'armée soviétique dans le cadre de six engins spatiaux Parus circulant sur des orbites quasi polaires à une altitude de 1000 km. Trois ans plus tard, le système de radionavigation par satellite Cicada (SRNS) a été mis en service, composé de quatre engins spatiaux sur des orbites de la même classe que celle de l'engin spatial Parus. Et si le premier système était utilisé exclusivement dans l'intérêt du ministère de la Défense de l'URSS, le second était principalement destiné à la navigation de navires civils. L'équipement des navires marchands avec des équipements de navigation par satellite s'est avéré très rentable, car grâce à l'augmentation de la précision de la navigation, il a été possible d'économiser tellement de temps de navigation et de carburant que l'équipement de bord du consommateur s'est rentabilisé après la première année de fonctionnement. . Au cours des tests de ceux-ci et du système Cyclone qui les a précédés, il a été constaté que l'erreur de positionnement d'un navire en mouvement sur la base des signaux de navigation de ces satellites est de 250 ... 300 m. sont calculés et mis à bord du vaisseau spatial par moyen du complexe de contrôle au sol (GCC). Afin d'améliorer la précision de la détermination et de la prédiction des paramètres des orbites des satellites de navigation, un schéma spécial de mesure des paramètres des orbites au moyen de GCC a été élaboré et des méthodes de prévision plus précises ont été développées. Pour identifier les caractéristiques locales du champ gravitationnel de la Terre qui affectent les orbites sélectionnées des engins spatiaux de navigation (NSA), des satellites géodésiques spéciaux "Kosmos-842" et "Kosmos-911" ont été lancés sur les mêmes orbites. L'ensemble des mesures prises a permis d'affiner les coordonnées des instruments de mesure et de calculer les paramètres du modèle d'adaptation du champ gravitationnel, conçu spécifiquement pour déterminer et prédire les paramètres de mouvement du SV. En conséquence, la précision des propres éphémérides transmises dans le cadre du signal de navigation a été augmentée de près d'un ordre de grandeur, de sorte que leur erreur dans l'intervalle de prévision quotidienne ne dépassait pas 70...80 m. l'erreur dans la détermination de leur position par les navires de mer a diminué à 80...100 m .
Cependant, les systèmes LEO ne pouvaient pas répondre aux exigences de toutes les catégories potentielles de nouveaux consommateurs en raison des principes qui sous-tendent leur construction. Ainsi, si pour les consommateurs fixes équipés d'un équipement de réception à deux canaux, l'erreur de positionnement a été réduite à 32 m (données du "Transit" américain SRNS), alors lors du déplacement, les erreurs commencent immédiatement à augmenter en raison d'un calcul à l'estime inexact - faible- orbite SRNS ne permettait pas de déterminer la vitesse de déplacement. De plus, seules deux coordonnées spatiales peuvent être déterminées à partir des mesures résultantes. Le deuxième inconvénient systèmes en orbite basse il manquait une couverture globale puisque, par exemple, à l'équateur, les satellites traversaient la zone de visibilité du consommateur en 1h30 en moyenne, ce qui ne permet que des sessions de navigation discrètes. Enfin, du fait de l'utilisation d'un seul NSC dans une session, la durée des mesures peut atteindre jusqu'à 10...16 minutes. La longue durée des sessions et les intervalles importants entre elles rendent inévitable l'utilisation de mesures spéciales pour l'estime. Dans le même temps, les erreurs numériques limitent la précision de la localisation. Néanmoins, l'équipement de l'avion a été testé en relation avec les signaux des systèmes Transit et Cicada. Dans le même temps, il a été confirmé que l'erreur de détermination de l'emplacement dépend faiblement des manœuvres de l'aéronef et est bien déterminée principalement par les erreurs de connaissance de la vitesse sol, ne dépassant pas 1,8 km.
Les SRNS de deuxième génération ont été initialement conçus comme des systèmes qui ne présentent pas tous les inconvénients ci-dessus. La principale exigence de la conception était de fournir au consommateur à tout moment la possibilité de déterminer trois coordonnées spatiales, le vecteur de vitesse et l'heure exacte, ce qui est obtenu en recevant simultanément des signaux d'au moins quatre satellites. En fin de compte, cela a conduit à la mise en œuvre d'une idée technique importante - la coordination de la position spatiale du SV en orbite et la coordination dans le temps des signaux émis par les satellites. La coordination du mouvement de tous les NSC confère au système des propriétés de réseau, qu'il perd en l'absence de correction de la position du NSC.
Comme orbites pour le nouveau système, des orbites semi-diurnes moyennes à hautes (20 000 km) ont été initialement choisies, ce qui a fourni le rapport optimal entre le nombre d'engins spatiaux dans le système et la taille de la zone de couverture radio. Cependant, par la suite, la hauteur de l'orbite de travail a été réduite à 19100 km. Cela a été fait sur la base du fait que pour les engins spatiaux avec une période de révolution égale à une demi-journée, un effet de résonance de l'influence de certaines harmoniques du géopotentiel se manifeste, conduisant à une "destruction" assez rapide de la position relative donnée de l'engin spatial et la configuration du système dans son ensemble. Evidemment, dans ce cas, pour maintenir le système, il faudrait effectuer des corrections plus fréquentes de l'orbite de chaque engin spatial. Avec la hauteur orbitale choisie pour une visibilité garantie par le consommateur d'au moins quatre satellites, leur nombre dans le système devrait être de 18, cependant, il a été augmenté à 24 afin d'augmenter la précision de la détermination des propres coordonnées et de la vitesse de l'utilisateur en lui fournissant avec la possibilité de choisir parmi les satellites visibles des quatre, offrant la plus haute précision. Il convient de noter qu'à l'heure actuelle, cette exigence a perdu de sa pertinence, car les équipements de navigation grand public standard modernes (NAP) ont la capacité de recevoir des signaux de 8 à 12 NSC dans la zone de visibilité radio en même temps, ce qui vous permet de ne pas vous inquiéter. sur le choix des quatre optimaux, mais traitez simplement toutes les mesures reçues .
L'un des principaux problèmes de la création du SRNS, qui fournit des déterminations de navigation non sollicitées simultanément sur plusieurs satellites, est le problème de la synchronisation mutuelle des échelles de temps des satellites avec une précision de milliardièmes de seconde (nanosecondes, ns), puisque la désynchronisation de la navigation les signaux émis par les satellites de seulement 10 ns provoquent une erreur supplémentaire dans la détermination de l'emplacement du consommateur jusqu'à 10 ... 15 m.Pour résoudre le problème de la synchronisation de haute précision des échelles de temps embarquées, il était nécessaire d'installer une fréquence de césium très stable étalons et un étalon d'hydrogène au sol (un ordre de grandeur plus stable) sur les satellites, ainsi que pour créer des moyens au sol de comparaison d'échelles avec une erreur de 3 ... 5 ns
En 1977-78. dans NPO PM, une conception préliminaire du système a été réalisée, dont les matériaux ont été approuvés en septembre 1978 par une commission interministérielle présidée par le général de division I. V. Meshcheryakov. La tâche tactique et technique (TTZ) pour le système GLONASS a été convenue avec les commandants en chef de tous les types de forces armées et les ministères : Minobshchemash, Minradioprom, Minaviaprom, Minoboronprom, Minmorflot, Minrybkhoz, Minsudprom et le ministère de la Civil Aviation. En novembre 1978, le TTZ a été approuvé par le ministre de la Défense de l'URSS.
Cependant, à ce moment-là, en raison de la trop longue période de coordination de la tâche, les délais initiaux de déploiement du système ont été perturbés. Par conséquent, le 29 août 1979, un nouveau décret du Comité central et du Conseil des ministres a été publié via GLONASS. Il a fixé les délais suivants pour la mise en œuvre des travaux sur le système :
Début des essais en vol et création d'un système de 4 à 6 engins spatiaux Uragan pour tester les principes de base et Caractéristiques-1981;
Création d'un système de 10-12 engins spatiaux Uragan (dans deux plans de travail orbitaux) et mise en service dans la composition et avec les caractéristiques de performance convenues entre le ministère de la Défense, le ministère de l'Ingénierie générale et le ministère de l'Industrie radio - 1984 ;
Modernisation du système jusqu'à 24 engins spatiaux - 1987.
Les principaux développeurs du système dans le Décret ont été identifiés :
NPO PM Minobshchemash - pour le système dans son ensemble ;
PO "Radiopribor" (maintenant RNII KP) du ministère de la Machinerie générale - pour le complexe de contrôle au sol, le complexe radio-technique embarqué, les équipements grand public ;
LNRTI (aujourd'hui RIRV) du ministère de l'industrie radio - pour le complexe de navigation et de temps.
Cependant, ces procédures et conditions ont dû être clarifiées à nouveau en juillet 1981. Dans le nouveau décret du Comité central et du Conseil des ministres, 1982 a été désignée comme date de début du déploiement du système.
Les essais en vol du système GLONASS ont commencé le 12 octobre 1982 avec le lancement du premier vaisseau spatial 11F654 "Uragan" N11L et de deux maquettes de poids et de taille 11F654GVM. Puis, lors des six lancements suivants, deux engins spatiaux réguliers et un moteur principal ont été mis en orbite. Cela était dû à l'indisponibilité de l'équipement électronique des satellites. Ce n'est qu'à partir du huitième lancement dans le cadre du déploiement du système GLONASS (16 septembre 1986) que trois engins spatiaux réguliers ont été lancés en orbite à la fois. Deux fois (10 janvier et 31 mai 1989), avec deux engins spatiaux Uragan, l'engin spatial géodésique passif PKA Etalon a été lancé en orbite, utilisé pour affiner les paramètres du champ gravitationnel et son effet sur les orbites de l'engin spatial Uragan.
Pour tester l'équipement de navigation, des ensembles de base de six pièces de chaque article ont été fabriqués pour l'armée de l'air, la marine, la SV, la MGA, la MMF et les forces de missiles stratégiques. Au total, 22 ont été affectés aux essais en vol. vaisseau spatial(9-10 lancements). Ce nombre d'engins spatiaux était épuisé le 16 septembre 1987. Cependant, à ce moment-là, le système n'avait pas été déployé, même pour une utilisation limitée (12 engins spatiaux dans deux avions). Seulement après le lancement le 4 avril 1991, GLONASS comprenait 12 satellites opérationnels en même temps.
Le 24 septembre 1993, le premier étage du système GLONASS est mis en service. À partir de ce moment, les lancements d'engins spatiaux dans le troisième plan orbital ont commencé. Le 14 décembre 1995, après le 27e lancement de Proton-K avec Hurricanes, le déploiement de la configuration standard du système GLONASS était achevé. Au total, d'octobre 1982 à décembre 1998, 74 engins spatiaux Uragan et huit de ses maquettes taille-poids (GVM) ont été mis en orbite. Lors du déploiement du système, six Hurricanes se sont retrouvés sur des orbites hors conception en raison de défaillances de l'étage supérieur 11S861. Selon des estimations faites en 1997, près de 2,5 milliards de dollars ont été dépensés pour déployer le système.
Principes de base de fonctionnement du système GLONASS
Les satellites GLONASS émettent en continu deux types de signaux de navigation : un signal de navigation à précision standard (ST) dans la bande L1 (1,6 GHz) et un signal de navigation à haute précision (HT) dans les bandes L1 et L2 (1,2 GHz). Les informations fournies par le signal de navigation CT sont disponibles pour tous les consommateurs de manière permanente et globale et permettent, lors de l'utilisation des récepteurs GLONASS, de déterminer :
coordonnées horizontales avec une précision de 50 à 70 m (probabilité 99,7%);
coordonnées verticales avec une précision de 70 m (probabilité de 99,7 %) ;
composantes du vecteur vitesse avec une précision de 15 cm/s (99,7 % de probabilité)
· heure exacte avec une précision de 0,7 µs (probabilité de 99,7 %).
Ces précisions peuvent être grandement améliorées en utilisant une méthode de navigation différentielle et/ou des méthodes de mesure spéciales supplémentaires.
Le signal VT est principalement destiné aux consommateurs du ministère de la Défense RF, et son utilisation non autorisée n'est pas recommandée. La question de la fourniture d'un signal VT aux consommateurs civils est à l'étude.
Pour déterminer les coordonnées spatiales et l'heure exacte, il est nécessaire de recevoir et de traiter les signaux de navigation d'au moins 4 satellites GLONASS. Lors de la réception de signaux radio de navigation GLONASS, le récepteur, à l'aide de procédés d'ingénierie radio connus, mesure les distances aux satellites visibles et mesure leur vitesse.
Simultanément aux mesures, le récepteur traite automatiquement les horodatages et les informations numériques contenues dans chaque signal radio de navigation. L'information numérique décrit la position d'un satellite donné dans l'espace et dans le temps (éphémérides) par rapport à une seule échelle de temps pour le système et dans un système de coordonnées cartésiennes associées géocentriques. De plus, les informations numériques décrivent la position des autres satellites du système (almanach) sous la forme d'éléments képlériens de leurs orbites et contiennent certains autres paramètres. Les résultats de mesure et les informations numériques reçues sont les données initiales pour résoudre la tâche de navigation consistant à déterminer les coordonnées et les paramètres de mouvement. Le problème de navigation est résolu automatiquement dans le dispositif informatique du récepteur, en utilisant la méthode bien connue des moindres carrés. À la suite de la décision, trois coordonnées de l'emplacement du consommateur, la vitesse de son déplacement sont déterminées et l'échelle de temps du consommateur est liée à l'échelle de temps universel coordonné (UTC) de haute précision.
domaine de la radionavigation
Les signaux radio de navigation émis par les NSC réguliers forment un champ de radionavigation dans l'espace proche de la Terre.
Dans le GLONASS SRNS, chaque satellite régulier émet des signaux radio de navigation de 1600 MHz et 1250 MHz vers la Terre à l'aide d'antennes émettrices, dont la partie active du diagramme de rayonnement (DN) a une largeur de 2 =38 et "éclaire ” le disque terrestre avec un excès jusqu'à une hauteur h 0 au-dessus de la surface.
La partie travaillante du DN peut être représentée comme un faisceau radio conique avec un angle de 2 0 au sommet. Il est évident que
sin 0 \u003d (h 0 + r) / (H + r),
où r = 6400 km rayon de la Terre ; H = 19100 km l'altitude de l'orbite SV.
En remplaçant 0 \u003d 19, nous obtenons h 0 \u003d 2000 km.
Avec un gaz d'échappement plein (24 SV réguliers), le champ de radionavigation aux altitudes h h 0 = 2000 km est continu dans l'espace, c'est-à-dire le consommateur en tout point de cet espace est "éclairé" par des faisceaux radio d'au moins quatre satellites, formant par rapport à lui une constellation satisfaisante en termes de facteur géométrique pour la détermination autonome opérationnelle des coordonnées et du vecteur vitesse.
Aux hauteurs h h 0, le champ de radionavigation devient discret dans l'espace. Les objets spatiaux aux altitudes h 0 h H sont "éclairés" par des faisceaux radio de la constellation nécessaire à la navigation opérationnelle (au moins quatre satellites, y compris des satellites sous l'horizon local) pas partout, mais seulement lorsqu'ils se trouvent dans certaines zones de l'espace .
Les objets spatiaux aux altitudes h H (par exemple, en orbite géostationnaire) seront "éclairés" dans certaines parties de leur orbite par un faisceau radio d'un ou deux satellites (avec GO complet), et le satellite peut ne pas déterminer rapidement l'orbite d'un objet spatial basé sur le traitement des résultats de la réception des données de navigation, des signaux radio dans les parties « éclairées » de l'orbite.
On se borne à considérer un champ continu de radionavigation (h h 0). La principale caractéristique du champ de radionavigation pour le consommateur au sol est la puissance du signal radio de navigation des satellites proches du zénith et proches de l'horizon en sortie de l'antenne de réception "standard" (hors réflexions sur la surface de la Terre) :
P 0 \u003d P p G () G 0 () 2 / (4 R) 2,
où P p puissance de rayonnement de l'émetteur ; G() directivité de l'antenne d'émission (en tenant compte des pertes dans l'AFU) dans la direction vers l'antenne de réception ; G 0 () directivité de l'antenne de réception "standard" dans la direction vers l'antenne d'émission ; la longueur d'onde de l'oscillation porteuse du signal radio ; R la distance entre l'antenne de réception et l'antenne d'émission.
Dans le système GLONASS, les antennes d'émission des signaux radio de navigation sur le satellite ont une polarisation circulaire à droite du rayonnement.
Le coefficient de directivité G() des antennes d'émission dans le secteur de travail des directions 19 par rapport à l'axe de l'antenne est
Comme antenne de réception "standard", il convient de considérer une antenne de réception isotrope à polarisation circulaire, G 0 () = 1.
La distance R entre l'antenne de réception située à la surface de la Terre et le proche zénith ( = 90) NSV sera R = H = 19100 km, jusqu'au proche horizon ( = 5) NSV sera R = 24000 km.
Bilan de puissance P 0 des signaux radio de navigation à bande étroite en sortie d'une antenne de réception « standard » :
| 1600 MHz | 1250 MHz | |||
| , arc. deg. | 90 | 5 | 90 | 5 |
| Pp, dBW | | | ||
| G(), dB | +10 | +12 | +9 | +11 |
| ( R) 2 , dB | 182 | 184 | 180 | 182 |
| G 0 (), dB | 0 | 0 | ||
| P 0 , dB | - 157 1 | - 157 1 | - 162 1 | - 162 1 |
A noter que la puissance du signal radio de navigation reçu par un utilisateur au sol utilisant une antenne isotrope est la même pour les satellites proches du zénith et proches de l'horizon.
Structure du signal GLONASS
un code de télémétrie grossier transmis à un débit de 511 Kbit/s (Fig. 6c);
des séquences de données de navigation transmises à un débit de 50 bit/s (Fig. 6a) ;
oscillation de méandre transmise à un débit de 100 bit/s (Fig. 6b).
Le signal dans la plage L1 (similaire au code C/A dans le GPS) est disponible pour tous les utilisateurs dans la plage de visibilité de l'engin spatial. Le signal dans la bande L2 est destiné aux besoins militaires, et sa structure n'est pas divulguée.
Pour les signaux radio de navigation, le CI est formé à bord du NSC sur la base des données transmises du GCC du système à la carte du NSC à l'aide d'un équipement radio. Le CI transmis dans les signaux radio de navigation est structuré sous forme de lignes, de trames et de supertrames.
Dans un signal radio de navigation à bande étroite de 1600 MHz, la ligne CI a une durée de 2 s (avec le MB) et contient 85 symboles binaires d'une durée de 20 ms, transmis dans un code relatif. Le premier caractère de chaque ligne est l'initiale (« blanc ») du code relatif. Les huit derniers caractères de chaque ligne sont des caractères de contrôle de code Hamming, vous permettant de corriger un seul caractère erroné et de détecter deux caractères erronés dans une ligne. La trame contient 15 lignes (30 s), la supertrame contient 5 trames (2,5 min).
Dans le cadre de chaque trame, le volume complet des CI opérationnels et une partie de l'almanach du système sont transmis. L'almanach complet est transmis dans la supertrame.
Le DI opérationnel dans la trame fait référence au SV émettant un signal radio de navigation et contient :
Signes d'authenticité du QI dans le cadre ;
· instant de début de trame t k ;
· informations d'éphémérides coordonnées et dérivées des coordonnées satellitaires dans un repère géocentrique rectangulaire à l'instant t 0 ;
· des corrections fréquence-temps (FCC) à l'instant t 0 sous la forme d'une correction relative à la fréquence porteuse du signal radio de navigation et de corrections au NSC BSW ;
· temps t 0 .
Le temps t 0 , auquel EI et FVP sont « attachés », est un multiple de 30 min depuis le début de la journée.
L'almanach du système contient :
l'heure à laquelle se réfère l'almanach ;
· paramètres orbitaux, nombre de paires de fréquences porteuses et correction à BSW pour chaque SV régulier dans l'OG (24 SV) ;
· Correction du SHV du système par rapport au SHV du pays, l'erreur de correction n'est pas supérieure à 1 µs.
L'almanach système est nécessaire dans le NAP pour planifier une session de navigation (choix de la constellation optimale du SV) et pour recevoir les signaux radio de navigation dans le système (prévision du décalage Doppler de la fréquence porteuse). L'ID opérationnel est nécessaire dans le NAP dans la session de navigation, puisque le FVP est entré dans les résultats de mesure, et l'EI est utilisé pour déterminer les coordonnées et le vecteur de vitesse du consommateur.
Dans le système NAVSTAR, le CI dans les signaux radio de navigation à bande étroite est structuré comme suit : une ligne a une durée de 6 s, une trame contient 5 lignes (30 s), une supertrame 25 trames (12,5 min).
Les signaux radio de navigation à bande étroite du système GLONASS permettent une réception (mise à jour) plus rapide de l'almanach en raison de la durée plus courte des supertrames (2,5 min) par rapport au système NAVSTAR (12,5 min)
Mesures de navigation dans PNA multicanal
Considérons un NAP multicanal utilisant des signaux radio à bande étroite et destiné à la navigation globale d'objets mobiles terrestres (terre, mer, air). Nous supposerons qu'une antenne de réception largement directionnelle est utilisée dans le NAP.
Dans chaque canal NAP en mode poursuite d'un signal radio de navigation à bande étroite, un signal numérique est reçu et deux paramètres de navigation sont mesurés chaque seconde - la pseudo-portée et la pseudo-vitesse radiale.
La pseudo-distance de l'objet au NSC est mesurée dans le NAP en mesurant le décalage du PSP1 reçu par rapport au signal de référence dans le NAP. La pseudo-vitesse radiale de l'objet par rapport au NSC est mesurée en mesurant le décalage de la fréquence porteuse du signal radio de navigation reçu par rapport à la fréquence du signal de référence dans le NAP. Le signal de référence dans le NAP est formé à l'aide d'un oscillateur à cristal.
Les résultats des mesures de pseudodistances S k (t) pour au moins quatre SV sélectionnés (k = 1,2,3,4), en tenant compte de l'introduction de FWP contenu dans la trame CI, peuvent être exprimés comme suit :
S k (t)=R k (t)+c (t)+c k (t)+ S k (t),
où R k (t) distance de l'objet au satellite ; с la vitesse de la lumière ; (t) décalage de NAP LB (signal de référence) par rapport au système LB ; k (t) erreur FVP ; S k (t) erreur de mesure dans NAP.
Dans un NAP bi-bande, les mesures de navigation de pseudodistances à deux fréquences porteuses 1600 MHz et 1250 MHz permettent d'exclure les erreurs de mesure ionosphérique de la manière suivante. Désignons S 0 (t) la pseudo-distance mesurée sans erreurs ionosphériques. Étant donné que pour les gammes supérieures et inférieures
S dans (t) \u003d S 0 (t) + A / ; S n (t) \u003d S 0 (t) + A / ,
où А/ 2 erreur de mesure de la pseudodistance ionosphérique, l'algorithme permettant d'obtenir le résultat combiné S 0 (t), dans lequel les erreurs ionosphériques sont exclues, sera le suivant :
S 0 (t) \u003d S dans (t) -S n (t); m \u003d n / dans \u003d 7/9.
L'erreur d'une mesure de pseudo-distance à double plage peut être estimée comme suit :
S 0 = S en - S n = 2,53 S en - 1,53 S n.
Dans la session de navigation, les résultats des mesures dans le NAP de pseudodistances relatives à au moins quatre NSC sélectionnés pour la session, et l'EI reçu des NSC sélectionnés, nous permettent de déterminer les trois coordonnées de l'objet et le décalage de l'objet BW local (signal de référence) par rapport au BW du système.
Le but de cette section est d'évaluer l'erreur de mesure des pseudodistances dans un NAP multicanal lors de l'utilisation de signaux radio de navigation à bande étroite. Les principales sources d'erreurs de mesure de pseudodistance dans un NAP multicanal sont : le bruit et les trajets multiples à l'entrée du récepteur, la troposphère et l'ionosphère (dans un NAP monobande).
Lors de l'estimation des erreurs de pseudo-distance causées par le bruit et les trajets multiples à l'entrée du récepteur, nous supposerons que des discriminateurs de retard sont utilisés dans les canaux NAP des circuits de poursuite PRS1, dans lesquels la largeur de la section linéaire centrale de la caractéristique de discrimination est égale à la durée du symbole PRS1.
L'erreur de bruit (S) des mesures de pseudo-distance à bande unique peut être estimée comme suit :
où c est la vitesse de la lumière ; F 1 fréquence d'horloge PSP1 ; P c /g w potentiel énergétique du signal radio de navigation à bande étroite à l'entrée du récepteur ; k détérioration du potentiel énergétique dans le récepteur (k 1,5); T 0 intervalle de calcul de la moyenne (accumulation) des mesures.
Les potentiels énergétiques des signaux radio de navigation à bande étroite à l'entrée du récepteur du NAP avec une antenne de réception largement directionnelle (voir ci-dessus) sont [dB Hz] :
| =90 | =5 | |
| 1600 MHz | +47...49 | +39...44 |
| 1250 MHz | +43...45 | +34...39 |
et, en conséquence, les erreurs de bruit des mesures à plage unique avec moyennage T 0 = 1s seront [m] :
| | | |
| (entrée S) 1600 MHz | 1,7...2,1 | 3,3...6,0 |
| (Sn) 1250 MHz | 3,0...4,0 | 5,9...10,5 |
L'erreur de bruit de la mesure de pseudo-distance à double plage peut être trouvée comme suit :
(S 0)=( 2 + 2 ) 1/2 ;
et en conséquence on obtient à T 0 =1c
(S 0) \u003d 
Un signal radio de navigation provenant d'un satellite proche de l'horizon peut atteindre un objet en mouvement au sol non seulement directement, mais également en raison de la réflexion spéculaire de la surface de la Terre (trajets multiples). Le signal radio réfléchi vient à l'objet d'une direction au-dessous de l'horizon local, et lors de la réflexion spéculaire, il se transforme en direction opposée polarisation circulaire du signal radio. Compte tenu de cette circonstance et du fait de la sélectivité spatiale de l'antenne de réception, la puissance du signal radio réfléchi P c2 sera très inférieure à la puissance du signal radio direct P c1 à l'entrée du récepteur.
L'erreur de mesure de la pseudo-distance par rapport au satellite proche de l'horizon, due aux trajets multiples lors de l'utilisation d'un signal radio de navigation à bande étroite, sera maximale dans la pire des situations, lorsque le retard t du signal radio réfléchi par rapport au signal radio direct à l'entrée du récepteur sera égal à t=1/2F 1 , où F 1 fréquence d'horloge du SRP1 . Avec t 1/2F 1 , et avec t 3/2F 1 l'erreur sera bien moindre que dans la pire des situations. À T 0 = 1 s, l'erreur de pseudo-distance par rapport à un satellite proche de l'horizon due aux trajets multiples dans la pire situation pour les signaux radio de navigation à bande étroite sera égale à
En remplaçant P c2 /P c1 = - (30...32) dB, on obtient (S) = 3,0 m, ce qui est en bon accord avec les données expérimentales. Ainsi, avec des mesures bi-bande (1600 MHz, 1250 MHz) et T 0 =1 c on obtient :
(S 0) \u003d ![]() (S)=9.0m.
(S)=9.0m.
Dans la troposphère, la vitesse de propagation d'une onde radio est égale à c=c 0 /n(h), où c 0 est la vitesse de propagation de la lumière dans le vide ; n(h) indice de réfraction de la troposphère à une hauteur h au-dessus de la surface de la Terre, n(h) .
L'erreur troposphérique de mesure de distance non demandée (pseudorange) pour SV aux angles d'élévation SV peut être trouvée comme suit :
R()= 
Dans NAP, les erreurs troposphériques sont compensées par des corrections calculées. Si les corrections troposphériques sont calculées pour les paramètres moyens de la troposphère (globalement), alors leur erreur ( R) sera de 10 % de la valeur de correction R().
Pour estimer les erreurs, vous pouvez utiliser un modèle de troposphère exponentiel simple :
n(h) = n(0) e -h/à ;
et, en remplaçant les valeurs moyennes n(0)=3 10 -4 , a=8 km, on obtient :
Estimons les erreurs ionosphériques en mesure de pseudo-distance dans un NAP mono-bande (1600 MHz). L'ionosphère terrestre commence à une hauteur de 100 km, à des altitudes de 300 à 400, la concentration d'électrons dans l'ionosphère est maximale ;
La vitesse de groupe du signal radio dans l'ionosphère est c = c 0 n(h), où c 0 la vitesse de la lumière dans le vide, n(h) l'indice de réfraction de l'ionosphère à une hauteur h au-dessus de la surface de la Terre , n(h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 MHz, vous pouvez utiliser l'équation :
n (h) \u003d 1-n (h) \u003d 40,3 N (h) / f 2,
où N(h) concentration électronique de l'ionosphère à la hauteur h [el/cm 3 ] ; fréquence porteuse f du signal radio [kHz].
Estimons les erreurs ionosphériques d'une mesure de distance non demandée (pseudorange) vers des satellites proches du zénith et proches de l'horizon.
L'erreur ionosphérique lors du passage vertical d'un faisceau radio vers un objet au sol à partir d'un satellite anti-aérien peut être estimée comme suit :
R 1 = 
Le profil vertical de la valeur n(h) en fonction de la hauteur peut être représenté par :
1. à h h 1 =100 km n(h) = 0 ;
2. à h 1 h h 2 = 300 km n(h) augmente linéairement jusqu'à n m , où n m valeur maximale n(h) ;
3. à h 2 h h 3 = 400 km n (h) = n m;
4. à h h 3 = 400 km n (h) = n m e
En utilisant cette approximation pour n(h) , nous obtenons une formule pour estimer l'erreur ionosphérique des mesures de distance non sollicitées (pseudorange) vers un satellite anti-aérien
R 1 = b e n m ;
b e \u003d 0,5 (h 2 -h 1) + (h 3 -h 2) + a \u003d 400 km.
Le paramètre b e peut être appelé l'épaisseur de l'ionosphère équivalente, dans laquelle n(h) = n m aux hauteurs h = 200...600 km et en dehors de ces hauteurs n(h) = 0.
L'erreur ionosphérique R 2 de la pseudodistance d'un satellite horizontal ( ) peut être estimée approximativement comme suit :
R 2 = R 1 / cos ; sin \u003d r / (r + h 3) ,
où l'angle entre le faisceau radio du NSC horizontal ( ) et la verticale locale à une hauteur h 3 =400 km (le milieu de l'ionosphère équivalente) ; r rayon de la Terre. En effectuant des calculs, nous obtenons et, par conséquent, R 2 =3,3 R 1. Pour un satellite proche de l'horizon ( =5 ...10) on peut supposer que R 2 =3 R 1 .
Trouvons la valeur n m pour la fréquence porteuse f=1600 MHz du signal radio de navigation. Aux latitudes moyennes dans la pire saison (journée d'hiver) pendant les années d'activité solaire maximale, la concentration maximale d'électrons à des altitudes de 300...400 km peut atteindre N = 3,0 10 6 e/cm 3 , et par conséquent pour f= 1.6 10 6 kHz on obtient
n m \u003d 3,8 10 -5, R 1 \u003d 15 m, R 2 \u003d 45 m.
La nuit et en été, les erreurs ionosphériques seront plusieurs fois plus faibles. Pendant les années d'activité solaire minimale, les erreurs ionosphériques, même un jour d'hiver, sont 5 à 6 fois inférieures aux valeurs maximales ci-dessus.
Discutons de la perspective lorsque le système GLONASS exploitera le NSC de la deuxième modification, qui émettra un signal radio de navigation à deux composants de 1250 MHz au lieu d'un signal radio à un seul composant de 1250 MHz dans le NSC de la première modification. En conséquence, il devient possible de mesurer des paramètres de navigation dans un NAP bi-bande en utilisant des signaux radio à bande étroite de 1600 MHz et 1250 MHz pour éliminer les erreurs de mesure ionosphériques. Cependant, la mesure de pseudo-distance bi-bande augmentera considérablement le bruit et les erreurs de trajets multiples par rapport à un NAP mono-bande (1600 MHz). Sur des objets dynamiques avec un modèle de mouvement non déterministe (T 0 =1 s), il est déconseillé d'utiliser des signaux radio de navigation à bande étroite bi-bande de 1600 MHz et 1250 MHz pour déterminer les coordonnées de l'objet, car dans ce cas cas, comme indiqué ci-dessus :
1. les erreurs de bruit du satellite à pseudo-portée par rapport à l'horizon proche seront (S 2) = 12...22 m, c'est-à-dire. dépassera les erreurs de mesure ionosphérique dans un NAP à bande unique pendant la pire saison (journée d'hiver);
2. Les erreurs de pseudo-portée vers un satellite proche de l'horizon dues aux trajets multiples seront (S 2) = 9 m (dans la pire des situations), c'est-à-dire sera proportionnelle aux erreurs ionosphériques dans un NAP à bande unique pendant la pire saison (journée d'hiver).
Sur des objets au sol à faible dynamique, il est conseillé d'utiliser des signaux radio de navigation à bande étroite bi-bande, car dans le NAP sur des objets à faible dynamique, il est possible de moyenner les résultats de mesure sur une longue période (T 0 = 30 s ) et réduire les erreurs de bruit de pseudo-distance et les erreurs dues aux trajets multiples au niveau requis.
La structure des signaux radio de navigation dans le système GLONASS
Dans le système GLONASS, chaque SV régulier dans l'OG émet constamment des signaux radio de navigation continus de type bruit dans deux bandes de fréquences de 1600 MHz et 1250 MHz. Dans NAP, les mesures de navigation dans deux gammes de fréquences permettent d'exclure les erreurs de mesure ionosphériques.
Chaque SV a un ASC au césium utilisé pour former l'échelle embarquée (BSV) et les signaux radio de navigation 1600 MHz et 1250 MHz.
Les signaux radio de navigation de type bruit dans le NSC OG diffèrent par les fréquences porteuses. Étant donné que les mêmes fréquences porteuses peuvent être utilisées pour des satellites mutuellement antipodaux dans des plans orbitaux, alors pour 24 satellites réguliers, le nombre minimum requis de fréquences porteuses dans chaque gamme de fréquences est de 12. Cette affirmation est tout à fait évidente si nous parlons de consommateurs au sol (terre, mer, air), puisque des SV mutuellement antipodaux ne peuvent pas être situés dans la zone de visibilité radio d'un utilisateur au sol en même temps. Le consommateur d'espace peut simultanément "voir" des NSC mutuellement antipodaux. Cependant, il existe deux circonstances favorables.
Le premier est celui de deux satellites mutuellement antipodaux, dont au moins un sera sous l'horizon local par rapport au consommateur d'espace. Il est pratiquement impossible d'utiliser sur un objet spatial une antenne largement directionnelle capable de recevoir les signaux radio de navigation de tous les SV "visibles" au-dessus et au-dessous de l'horizon local. Par conséquent, dans le NAP sur un objet spatial, soit une antenne largement directionnelle est utilisée pour recevoir les signaux radio de navigation des satellites situés au-dessus de l'horizon local ; ou plusieurs antennes et plusieurs récepteurs pour recevoir les signaux radio de navigation des NSC situés au-dessus et au-dessous de l'horizon local.
Dans les deux versions, le NAP sur un objet spatial effectuera une sélection spatiale efficace des signaux radio de navigation provenant de SV mutuellement antipodaux.
La deuxième circonstance est que dans le NAP pendant la session de navigation, la recherche de la fréquence porteuse de chaque signal radio de navigation reçu est effectuée dans une bande étroite ( 1 kHz) autour de la valeur prédite, en tenant compte du décalage Doppler du fréquence porteuse. Le décalage Doppler peut avoir des valeurs maximales de 5 kHz en NAP sur des objets terrestres et de 40 kHz en NAP sur des objets spatiaux en orbite basse. Par conséquent, dans le NAP sur un objet spatial, une sélection Doppler efficace des signaux radio de navigation des satellites radio-visibles est effectuée.
Ainsi, les signaux radio de navigation de satellites mutuellement antipodaux avec les mêmes fréquences porteuses seront séparés de manière fiable dans le NAP sur un objet spatial en raison de la sélection spatiale et Doppler.
Signal radio de navigation 1600 MHz bicomposant. A une fréquence porteuse donnée, deux signaux radio de navigation modulés par déphasage de type bruit de même puissance sont formés dans l'émetteur radio « en quadrature » (déphasage mutuel de 90) : bande étroite et large bande.
Un signal radio de navigation à bande étroite de 1600 MHz est généré par une modulation de phase à 180 de la forme d'onde porteuse avec une séquence pseudo-aléatoire binaire périodique (PRS1) avec une fréquence d'horloge F 1 = 0,511 MHz et une période de répétition T 1 = 1 ms (511 cycles). PSP1 est une M-séquence de polynôme caractéristique 1 + X 3 + X 5 . En inversant le PSP1, des horodatages (MT) de l'échelle de temps embarquée (BSHV) du NSC et des symboles binaires d'informations numériques (DI) sont transmis. L'horodatage a une durée de 0,3 s et est transmis à la fin de chaque intervalle de temps de deux secondes (à la fin des secondes paires). L'horodatage contient 30 symboles binaires d'une durée de 10 ms et est une séquence M de 31 symboles raccourcie d'un symbole.
Dans chaque ligne de deux secondes, à un intervalle de temps de 1,7 s, 85 symboles CI binaires sont transmis, d'une durée de 20 ms et multipliés par un méandre, qui a une durée de symbole de 10 ms. Les frontières des symboles de méandre, MV et CI sont cohérentes. Dans le récepteur, à l'aide d'un méandre, la synchronisation des symboles pour le MF est effectuée, et avec son aide - la synchronisation en minuscules et symbolique du DI.
Un signal radio de navigation à large bande de 1600 MHz est généré par une modulation de phase à 180 de la forme d'onde porteuse avec une séquence binaire PSP2 périodique avec une fréquence d'horloge de F2 = 5,11 MHz. En inversant PSP2, des symboles DI binaires de 20 ms sont transmis.
Le signal radio de navigation de 1 250 MHz émis par le NSC de la première modification est un signal radio de type bruit large bande à une seule composante généré par une modulation de phase à 180 de la forme d'onde porteuse d'un SRP2 binaire périodique (F 2 = 5,11 MHz) sans inversion, c'est à dire sans transmission de QI. Le signal radio de navigation de 1250 MHz émis par le NSC de la deuxième modification contiendra deux signaux radio de type bruit de 1250 MHz de même puissance en quadrature :
1. signal radio de navigation à bande étroite 1250 MHz avec PSP1 (F 1 = 0,511 MHz, T 1 = 1 ms) ;
2. signal radio de navigation large bande 1250 MHz avec PSP2 (F 2 = 5,11 MHz) sans DI.
Étant donné que la fréquence d'inversion PRS est bien inférieure à sa fréquence d'horloge, la largeur du «lobe» principal de l'enveloppe de l'enveloppe du spectre de puissance d'un signal de navigation à modulation de phase de type bruit est égale à la double valeur de l'horloge PRS la fréquence. Par conséquent, la largeur du « lobe » principal de l'enveloppe du spectre de puissance d'un signal radio de navigation à bande étroite est de 1,022 MHz, d'une large bande 10,22 MHz.
Lors de la conception du GLONASS SRNS, la "grille" suivante de valeurs nominales des fréquences porteuses pour les signaux radio de navigation a été développée dans deux gammes de fréquences 1600 MHz supérieur (V) et 1250 MHz inférieur (H):
вk = в0 +k в; v0 =1602,0000MHz ;
in = 0,5625 MHz ;
ík = í0 +k í ; n0 =1246,0000MHz ;
n = 0,4375 MHz ;
vk / nk = 9/7 ;
où k numéro de série conditionnel d'une paire de fréquences porteuses vk et nk pour les signaux radio de navigation 1600 MHz et 1250 MHz.
Les émetteurs radio de signaux radio de navigation dans le NSC de la première modification émettent des signaux radio de navigation à des fréquences porteuses commutables avec des nombres k = 1, ..., 24.
Voici les valeurs des fréquences porteuses extrêmes des signaux radio de navigation :
v1 =1602,5625MHz ; v24 =1615,5000MHz ;
n1 = 1246,4375 MHz ; n24 = 1256,5000 MHz ;
Les spectres de fonctionnement des signaux radio de navigation aux fréquences porteuses avec les numéros k = 1, ..., 24 occupent les bandes de fréquences :
a) signaux radio de navigation à bande étroite 1602,0 ... 1616,0 MHz ;
b) signaux radio de navigation à large bande 1597,4 ... ... 1620,6 MHz, 1241,3 ... 1261,6 MHz.
Dans la gamme de fréquences 1600 MHz et 1250 MHz, conformément au Règlement des radiocommunications, les bandes de fréquences suivantes sont attribuées :
a) pour les radiocommunications par satellite (Espace Terre) 1559,0 ... 1610,0 MHz ; 1215,0...1260,0 MHz ;
b) pour la radionavigation aéronautique 1559,0 ... 1626,5 MHz.
La CAMR-87 a attribué la bande de fréquences 1610,6 à 1613,8 MHz pour la radioastronomie à titre primaire. Afin de réduire et d'exclure complètement les interférences radio des radiotélescopes dans la gamme de fréquences de 1610,6 ... 1613,8 MHz des signaux radio de navigation du système GLONASS, l'administration du système GLONASS a adopté en 1993. décision, selon laquelle les nombres suivants (k) de fréquences porteuses seront utilisés dans le système GLONASS pour 24 SV réguliers :
1. avant 1998 k = 1,...,15; k = 21,...,24 ;
2. de 1998 à 2005 k = 1,...,12 ;
3. depuis 2005 k = -7,...,4.
Au premier stade (avant 1998) dans la bande de radioastronomie, il n'y a pratiquement pas de spectres de signaux radio de navigation à bande étroite de 1600 MHz, et d'ici 2005, les spectres des signaux radio de navigation à large bande seront également supprimés de la bande de radioastronomie. La troisième étape sera mise en œuvre grâce à l'utilisation du NSC de la deuxième modification, dans laquelle les émetteurs de signaux radio de navigation peuvent émettre des signaux radio de navigation sur n'importe quelle paire de fréquences porteuses commutables avec des nombres k=-7,0,...+12.
Le système NAVSTAR utilise des signaux radio de navigation de type bruit continu sur deux fréquences porteuses (supérieure et inférieure)
à = 1575,42 MHz ; n = 1227,6 MHz,
et la séparation des codes des signaux radio de navigation est utilisée pour 24 NSC réguliers.
Le signal radio de navigation à la fréquence porteuse supérieure dans est à deux composantes, il contient deux signaux radio de navigation de type bruit modulés par décalage de phase en quadrature (déphasage de 90) : bande étroite et bande large.
Le signal radio de navigation à bande étroite in est formé par une modulation de phase à 180 de l'onde porteuse d'un PRS1 périodique avec une fréquence d'horloge F 1 = 1,023 MHz et une période de répétition T 1 = 1 ms. Des symboles DI binaires d'une durée de 20 ms sont transmis en inversant PSP1.
Un signal radio de navigation à large bande in est formé par une modulation de phase à 180 de l'onde porteuse d'un PRS2 périodique avec une fréquence d'horloge F 2 = 10,23 MHz. Des symboles DI binaires d'une durée de symbole de 20 ms sont transmis par PSP2 inverseur.
Le signal radio de navigation n est monocomposant, large bande, formé par la modulation de la phase de l'onde porteuse par 180 du SRP2 périodique sans inversion.
Les signaux radio de navigation à large bande des systèmes NAVSTAR et GLONASS sont destinés à être utilisés par des consommateurs autorisés et sont protégés contre toute utilisation non autorisée.
Les signaux radio de navigation à bande étroite des systèmes NAVSTAR et GLONASS sont ouverts et destinés aux consommateurs civils. Mais dans le système NAVSTAR, ces signaux sont artificiellement déformés à l'aide d'une procédure d'accès sélectif, ce qui dégrade la précision de la navigation pour les utilisateurs sans licence.
Précision de la navigation globale des objets mobiles terrestres
Évaluons la précision de la détermination des coordonnées d'un objet mobile au sol lors de la navigation opérationnelle globale à l'aide d'un NAP multicanal utilisant des signaux radio de navigation à bande étroite avec une fréquence de 1600 MHz dans le système GLONASS avec une pleine OG de satellites réguliers.
L'erreur dans la détermination des coordonnées d'un objet en mouvement dépend des facteurs géométriques de la constellation de satellites radio-visibles utilisés dans la session de navigation et est due à des erreurs dans les EI et FVP dans les trames DI reçues du satellite, et des erreurs dans mesure des pseudodistances au satellite dans le satellite.
Lors de l'évaluation de la précision des coordonnées d'un objet en mouvement, les erreurs de EI et FVP peuvent être recalculées en erreurs équivalentes de pseudodistances au SV.
Les erreurs de coordonnées NSV recalculées en erreurs de pseudo-distance équivalentes sont des projections des erreurs de coordonnées NSV sur la direction allant de NSV à l'objet. Désignons : les erreurs de coordonnées SV dans les plans vertical et horizontal. A partir de constructions géométriques simples, les formules suivantes peuvent être obtenues pour recalculer les erreurs dans les coordonnées du SV en erreurs équivalentes dans les pseudodistances (plages) de l'objet au SV :
1. pour les satellites proches du zénith
S 1 = H 1 à ;
S 1 \u003d H 1 +0,15 M 1 à 45;
2. pour un satellite proche de l'horizon
S 2 = H 2 +0,25 M 2 à 2 0.
Les erreurs EI dans la prévision quotidienne pour la première modification de la SV (voir ci-dessus) moyenne (H) = 4 m, (L) = 15 m, et, par conséquent, les erreurs équivalentes des pseudodistances seront :
(S 1) = 4,0 ... 4,6 m et (S 2) = 5,5 m.
L'erreur FVP dans la prévision sur 12 heures pour la première modification de la SV est B = 14 ns et, par conséquent, l'erreur de pseudodistance équivalente est S) = 4,2 m.
Lors de l'utilisation de signaux radio de navigation à bande étroite, les erreurs de mesure de pseudodistance pour les satellites proches du zénithal S 1) et proches de l'horizon S 2) sont indiquées ci-dessus.
Composons le budget total des erreurs de pseudodistance sans l'ionosphère (que nous appellerons l'erreur de pseudodistance instrumentale) pour un NAP multicanal utilisant des signaux radio de navigation monobande (1600 MHz) à bande étroite (T 0 = 1 s) :
Dans un NAP à six canaux sur un objet en mouvement au sol, les erreurs instrumentales maximales (0,95) dans la détermination de l'emplacement d'un objet dans les plans horizontal p et vertical z sont associées à des erreurs instrumentales de pseudodistance au "haut" (près du zénith) SV (S 1) et au « bas » (proche de l'horizon) NCA (S 2) comme suit (voir ci-dessus) :
dans les meilleures situations p = 2,0 (S 2) ; z = 2,0 (a);
dans les pires situations p = 2,2 (S 2) ; z \u003d 2,2 (a),
(a) = 1/2.
En utilisant ces formules et les valeurs des erreurs instrumentales des pseudodistances obtenues ci-dessus, nous trouverons des estimations des erreurs instrumentales maximales dans la détermination de l'emplacement des objets dynamiques au sol (T 0 = 1 s) lors de l'utilisation de signaux radio de navigation à bande étroite dans un NAP à six canaux à bande unique (1 600 MHz) :
1. dans les meilleures situations (S 1) = 6,2 m ; (S 1) \u003d 7,7 m et, par conséquent, p \u003d 15,4 m; z = 34 m ;
2. dans les pires situations (S 1) = 6,6 m ; (S 1) \u003d 9,6 m et, par conséquent, p \u003d 21 m; z = 42 m.
Une évaluation rigoureuse de la contribution des erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol lors de l'utilisation d'un CAM monobande est une tâche assez difficile ; nous donnerons une analyse approximative.
Dans la section précédente, les erreurs ionosphériques dans la mesure des pseudodistances dans un NAP à bande unique ont été estimées. Il a été montré que l'erreur ionosphérique de la pseudo-distance (distance) par rapport au satellite proche de l'horizon ( =5 10) est égale à R 2 =3 R 1 , où R 1 la distance ionosphérique erreur avec un faisceau radio vertical. Les erreurs de pseudo-distance ionosphérique dans une session dépendent de l'heure de la session : elles sont minimales la nuit et maximales le jour.
Supposons que l'objet au sol soit situé sous l'intersection de deux anneaux orbitaux, et six satellites sont utilisés dans la session de navigation : deux proches du zénith et quatre proches de l'horizon. Il est évident que si la session de navigation se déroule vers midi, les erreurs ionosphériques des pseudodistances pour les satellites proches de l'horizon différeront peu les unes des autres et, par conséquent, les quatre différences entre la pseudodistance et les satellites proches de l'horizon et antiaériens sera approximativement le même D = R 2 - R 1 = 2 R 1 . Dans cette situation, les erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol lors d'une session de navigation autour de midi peuvent être estimées comme
z=2 D=4 R 1 ; x, y= 0,5 D= R 1 .
Si une session de navigation est effectuée le matin ou le soir, les erreurs ionosphériques des pseudodistances vers les satellites proches de l'horizon seront très différentes, et pour de telles sessions de navigation, les erreurs ionosphériques dans la détermination des coordonnées peuvent être estimées approximativement comme : x, y, z = 2 R 1 , où R 1 erreur ionosphérique de la pseudo-distance au satellite anti-aérien pendant la journée.
Si un objet au sol est équidistant de trois anneaux orbitaux, alors il n'y a pas de satellite proche du zénith dans la session de navigation, et les satellites "élevés" ont des angles d'élévation 1 = 41 ... 45 . Les erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol dans une telle session de navigation ne seront pas plus importantes que dans une session dans laquelle il y a un satellite proche du zénith.
Ainsi, dans les sessions de navigation d'objets au sol utilisant un NAP monobande à six canaux, les erreurs ionosphériques maximales dans la détermination des coordonnées de l'objet peuvent être estimées comme suit :
x, y = (1...2) R 1 ; z = (2...4) R 1 ,
où R 1 erreur ionosphérique avec un faisceau radio vertical de jour.
Dans la pire saison (journée d'hiver) pendant les années d'activité solaire maximale R 1 = 15 m. Par conséquent, les erreurs ionosphériques maximales pour déterminer l'emplacement d'un objet au sol seront
p = [( x) 2 +( y) 2 ] 1/2 = 21...42 m; z = 30...60 m.
Présentons les estimations obtenues des erreurs totales maximales (instrumentales et ionosphériques) de navigation globale dans le GLONASS SRNS lors de l'utilisation de signaux radio de navigation à bande étroite de 1600 MHz dans un NAP à six canaux sur des objets au sol dynamiques (T 0 = 1s) pendant les années d'activité solaire maximale :
Pendant les années d'activité solaire minimale, les erreurs ionosphériques seront 5 à 6 fois moindres et, par conséquent, les erreurs totales maximales de navigation globale des objets mobiles terrestres seront :
Satellite GLONASS
Le satellite GLONASS se compose structurellement d'un conteneur étanche cylindrique avec une unité d'instrumentation, un cadre de dispositifs d'alimentation d'antenne, des instruments de système d'orientation, des panneaux solaires avec entraînements, une unité de propulsion et un obturateur de système de contrôle thermique avec entraînements. Le satellite possède également des réflecteurs angulaires optiques conçus pour calibrer les signaux radio du système de mesure en mesurant la distance au satellite dans la gamme optique, ainsi que pour affiner les paramètres géodynamiques du modèle de mouvement du satellite. Structurellement, les réflecteurs d'angle sont formés sous la forme d'un bloc qui surveille en permanence la direction vers le centre de la Terre. La surface des réflecteurs d'angle est de 0,25 m2.
L'équipement embarqué comprend :
complexe de navigation ;
complexe de contrôle;
· système d'orientation et de stabilisation ;
Système de correction
· système de contrôle thermique;
le système d'alimentation.
Le complexe de navigation assure le fonctionnement du satellite en tant qu'élément du système GLONASS. Le complexe comprend : un synchroniseur, un formateur de signaux radio de navigation, un ordinateur de bord, un récepteur d'informations de navigation et un émetteur de signaux radio de navigation.
Le synchroniseur assure l'émission de fréquences de synchronisation très stables vers les équipements embarqués, la formation, le stockage, la correction et l'émission de l'échelle de temps embarquée.
Le conformateur de signaux radio de navigation fournit la formation de signaux radio de navigation modulés par déplacement de phase pseudo-aléatoires contenant un code de télémétrie et un message de navigation.
Le complexe de contrôle assure le contrôle des systèmes satellites et contrôle leur bon fonctionnement. Le complexe comprend : un système de commande et de mesure, une unité de contrôle des équipements embarqués et un système de contrôle de la télémétrie.
Le système de commande-mesure fournit la mesure de la distance en mode interrogation, le contrôle de l'échelle de temps embarquée, le contrôle du système par des commandes ponctuelles et des programmes horaires, l'enregistrement des informations de navigation dans le système de navigation embarqué et la transmission télémétrique.
L'unité de contrôle fournit la distribution d'énergie aux systèmes et appareils satellites, le traitement logique, la multiplication et l'amplification des commandes uniques.
Le système de contrôle d'attitude et de stabilisation assure le repos du satellite après séparation du lanceur, l'orientation initiale des panneaux solaires vers le Soleil et l'axe longitudinal du satellite vers la Terre, puis l'orientation de l'axe longitudinal du satellite au centre de la Terre et le pointage des panneaux solaires vers le Soleil, ainsi que la stabilisation du satellite dans le processus de correction d'orbite . Le système utilise un dispositif basé sur la construction infrarouge de la verticale locale (pour l'orientation vers le centre de la Terre) et un dispositif pour l'orientation vers le Soleil. L'erreur d'orientation par rapport au centre de la Terre n'est pas pire que 3 degrés et l'écart de la normale à la surface de la batterie solaire par rapport à la direction du Soleil n'est pas supérieur à 5 degrés. Pour minimiser les perturbations du mouvement du centre de masse du satellite, les moteurs d'inertie sont déchargés à l'aide d'un circuit magnétique. Un système de propulsion est utilisé comme organe exécutif lors de l'apaisement et de la stabilisation du satellite lors de l'émission d'une impulsion de correction.
Le mode calmant, qui se traduit par l'amortissement des vitesses angulaires, est activé dans la zone de visibilité radio.
Dans l'orientation initiale vers le mode Soleil, le satellite est tourné par rapport à l'axe longitudinal à l'aide de moteurs-volants de commande jusqu'à ce que le Soleil apparaisse dans le champ de vision du dispositif d'orientation solaire, qui est installé sur le panneau solaire.
Le mode d'orientation de la Terre commence à partir de la position d'orientation vers le Soleil en faisant tourner le satellite à l'aide de moteurs à volant d'inertie le long de l'axe orienté vers le Soleil jusqu'à ce que la Terre apparaisse dans le champ de vision de l'appareil pour l'orientation vers le centre de la Terre . En mode normal, l'orientation de l'axe du satellite avec les antennes vers le centre de la Terre est assurée à l'aide de moteurs de volant de commande en fonction des signaux des dispositifs d'orientation vers le centre de la Terre, l'orientation des panneaux solaires vers le Soleil en faisant tourner le satellite avec les panneaux solaires à l'aide du moteur à volant de commande dans un canal et fait tourner les panneaux de batterie par rapport au corps du satellite à l'aide d'un entraînement de rotation du panneau solaire à travers un autre canal en fonction des signaux des dispositifs d'orientation solaire.
Dans le mode orientation avant correction et stabilisation du satellite lors de l'émission de l'impulsion de correction, le suivi de l'orientation vers le Soleil n'est pas effectué.
Le système de correction assure que le satellite est amené à une position donnée dans le plan orbital et maintenu dans les limites données par l'argument de latitude. Le système comprend un système de propulsion et une unité de commande pour celui-ci. Le système de propulsion se compose de 24 propulseurs d'orientation d'une poussée de 10 g et de deux propulseurs de correction d'une poussée de 500 g.
Le système de contrôle thermique fournit le régime thermique requis du satellite. La régulation de la chaleur évacuée de l'enceinte est réalisée par des volets qui ouvrent ou ferment la surface de rayonnement en fonction de la température des gaz. L'évacuation de la chaleur des appareils s'effectue par circulation de gaz à l'aide d'un ventilateur.
Le système d'alimentation comprend des panneaux solaires, des batteries rechargeables, une unité d'automatisation et de stabilisation de tension. La puissance initiale des panneaux solaires est de 1600 W, la surface est de 17,5 m2.
Lorsque le satellite passe dans les zones d'ombre de la Terre et de la Lune, les systèmes embarqués sont alimentés par des batteries. Leur capacité de décharge est de 70 ampères-heures.
Pour assurer la fiabilité, deux ou trois ensembles de systèmes principaux embarqués sont installés sur le satellite.
Ainsi, le satellite GLONASS se voit confier les fonctions suivantes :
rayonnement de signaux de radionavigation très stables ;
Réception, stockage et transmission d'informations de navigation numériques;
formation, numérisation et transmission de signaux horaires précis;
· retransmission ou émission de signaux pour effectuer des mesures de trajectoire pour contrôler l'orbite et déterminer les corrections de l'échelle de temps embarquée ;
Réception et traitement des commandes ponctuelles ;
Réception, stockage et exécution de programmes temporaires de contrôle des modes de fonctionnement du satellite en orbite ;
· formation d'informations télémétriques sur l'état de l'équipement embarqué et son transfert pour traitement et analyse au complexe de contrôle au sol;
· réception et exécution des codes/commandes de correction et de phasage de l'échelle horaire bord ;
· Formation et transmission d'un "symptôme de dysfonctionnement" lorsque d'importants paramètres contrôlés dépassent les limites de la norme.
Les satellites GLONASS sont contrôlés en mode automatisé.
Le lancement des satellites GLONASS en orbite est effectué par un transporteur de classe lourde PROTON avec un étage supérieur depuis le cosmodrome de Baïkonour. Le porteur affiche simultanément trois satellites GLONASS.
Le régime de retrait comprend :
· insertion du véhicule de rentrée spatiale sur une orbite circulaire intermédiaire d'une hauteur d'environ 200 km ;
· transition vers une orbite elliptique avec un périgée de ~200 km, un apogée de ~19100 km et une inclinaison de 64,3 degrés.
Le transfert de chaque satellite vers un point donné du plan orbital est réalisé à l'aide d'un système de propulsion de satellite.
Précision d'amener au point de travail de l'orbite:
· selon la période de circulation - 0,5 s ;
· selon l'argument de latitude - 1deg.;
excentricité - ~0,01 ;
· selon l'inclinaison de l'orbite - ~ 0,3 deg.
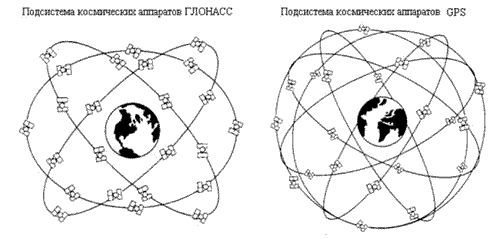
Segment spatial des systèmes GLONASS et GPS
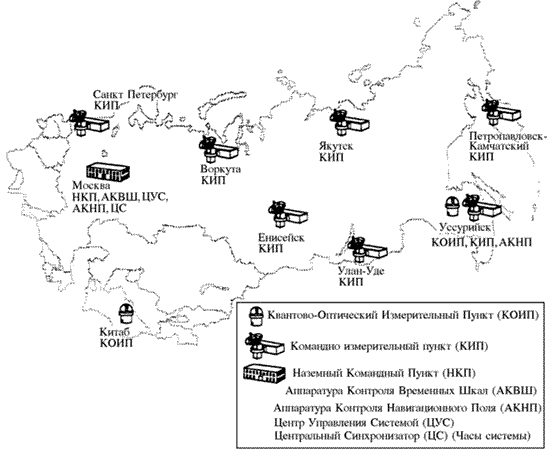
La structure des signaux radio de navigation du système GPS
Le système GPS utilise la signalisation par répartition en code (CDMA), de sorte que tous les satellites émettent des signaux à la même fréquence. Chaque satellite GPS émet deux signaux modulés par déplacement de phase. La fréquence du premier signal est L1 = 1575,42 MHz et la seconde - L2 = 1227,6 MHz. Le signal porteur L1 est modulé par deux séquences binaires formées chacune par sommation modulo 2 du code de télémétrie et des données système et de navigation transmises, générées à un débit de 50 bit/s. A la fréquence L1, deux composantes en quadrature sont transmises, manipulées biphasiquement avec des séquences binaires. La première séquence est la somme modulo 2 du code de télémétrie précise P ou du code secret Y et des données de navigation. La deuxième séquence est également la somme modulo 2 du code C/A grossier (ouvert) et de la même séquence de données de navigation.
Le signal radio à la fréquence L2 est manipulé biphasiquement par une seule des deux séquences précédemment considérées. Le choix de la séquence de modulation s'effectue sur commande depuis la Terre.
Chaque satellite utilise ses propres codes de télémétrie C/A et P(Y), ce qui permet de séparer les signaux satellites. Lors du processus de formation d'un code P(Y) de télémétrie précis, des horodatages de signal satellite sont formés simultanément.
Composition et structure des messages de navigation des satellites GPS
La division structurelle des informations de navigation des satellites GPS s'effectue en supertrames, trames, sous-trames et mots. Une supertrame est formée de 25 trames et dure 750 s (12,5 min). Une trame est transmise pendant 30 s et a une taille de 1500 bits. La trame est divisée en 5 sous-trames de 300 bits chacune et est transmise sur un intervalle de 6 s. Le début de chaque sous-trame désigne un horodatage correspondant au début/à la fin de l'intervalle de 6 s suivant de l'heure du système GPS. Une sous-trame est constituée de 10 mots de 30 bits. Dans chaque mot, les 6 bits les moins significatifs sont les bits de contrôle.
Dans les 1ère, 2ème et 3ème sous-trames, des données sur les paramètres de correction d'horloge et des données d'éphéméride de l'engin spatial avec lequel la communication est établie sont transmises. Le contenu et la structure de ces sous-trames restent les mêmes sur toutes les pages de la super-trame. Les 4e et 5e sous-trames contiennent des informations sur la configuration et l'état de tous les SC du système, les almanachs des SC, les messages spéciaux, les paramètres décrivant la relation entre l'heure GPS et l'UTC, etc.
Algorithmes de réception et de mesure des paramètres des signaux de radionavigation par satellite
Le segment des consommateurs de systèmes GPS et GLONASS comprend les récepteurs de signaux satellites. En mesurant les paramètres de ces signaux, le problème de navigation est résolu. Le récepteur peut être divisé en trois parties fonctionnelles :
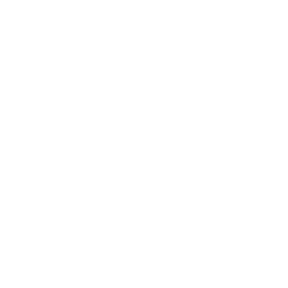 partie radiofréquence ;
partie radiofréquence ;
corrélateur numérique ;
CPU.
À partir de la sortie du dispositif d'alimentation d'antenne (antenne), le signal entre dans la partie radiofréquence.La tâche principale de cette partie est d'amplifier le signal d'entrée, de filtrer, de convertir la fréquence et de convertir l'analogique en numérique. De plus, la partie radiofréquence du récepteur reçoit la fréquence d'horloge pour la partie numérique du récepteur. A partir de la sortie de la partie radiofréquence, les lectures numériques du signal d'entrée sont envoyées à l'entrée du corrélateur numérique.
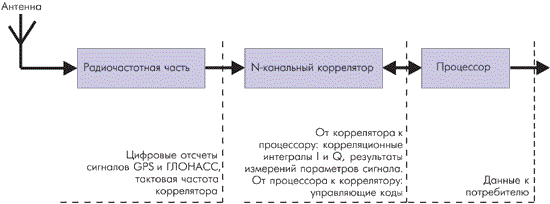
Structure de récepteur généralisée
Dans le corrélateur, le spectre du signal est transféré à la fréquence "zéro". Cela se fait en multipliant le signal d'entrée du corrélateur avec l'oscillation harmonique de référence dans les canaux en phase et en quadrature. En outre, le résultat de la multiplication subit un traitement de corrélation en multipliant avec le code de télémétrie de référence et en s'accumulant sur la période du code de télémétrie. En conséquence, nous obtenons les intégrales de corrélation I et Q. Les lectures des intégrales de corrélation sont envoyées au processeur pour un traitement ultérieur et la fermeture des boucles PLL (boucle à verrouillage de phase) et CVD (circuit de suivi de retard). Les mesures des paramètres du signal dans le récepteur ne sont pas effectuées directement à partir du signal d'entrée, mais à partir de sa copie exacte, formée par les systèmes PLL et CV. Les intégrales de corrélation I et Q permettent d'estimer le degré de « similarité » (corrélation) entre les signaux de référence et d'entrée. La tâche du corrélateur, outre la formation des intégrales I et Q, est de former un signal de référence en fonction des actions de contrôle (codes de contrôle) provenant du processeur. De plus, dans certains récepteurs, le corrélateur génère les mesures nécessaires des signaux de référence et les transfère au processeur pour un traitement ultérieur. En même temps, étant donné que les signaux de référence dans le corrélateur sont formés en fonction des codes de contrôle provenant du processeur, les mesures nécessaires des signaux de référence peuvent être effectuées directement dans le processeur, en traitant les codes de contrôle de manière appropriée, c'est-à-dire fait dans de nombreux récepteurs modernes.
Quels paramètres de signal sont mesurés par le corrélateur (processeur) ?
La gamme des mesures d'ingénierie radio est caractérisée par le temps de propagation du signal de l'objet de mesure au point de mesure. Dans les systèmes de navigation GPS/GLONASS, l'émission de signaux est synchronisée avec l'échelle de temps du système, plus précisément avec l'échelle de temps du satellite émettant ce signal. En même temps, l'utilisateur dispose d'informations sur l'écart entre l'échelle de temps du satellite et du système. Les informations numériques transmises par le satellite vous permettent de définir le moment d'émission d'un certain fragment du signal (horodatage) par le satellite en temps système. L'instant de réception de ce fragment est déterminé par l'échelle de temps du récepteur. L'échelle de temps du récepteur (consommateur) est formée à l'aide d'étalons de fréquence à quartz, il y a donc une « dérive » constante de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. La différence entre l'instant de réception d'un fragment de signal, compté sur l'échelle de temps du récepteur, et l'instant d'émission par son satellite, compté sur l'échelle du satellite, multiplié par la vitesse de la lumière, est appelée pseudodistance. Pourquoi pseudorange ? Parce qu'il diffère de la vraie distance d'une quantité égale au produit de la vitesse de la lumière et de la "déviation" de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. Lors de la résolution d'un problème de navigation, ce paramètre est déterminé avec les coordonnées du consommateur (récepteur).
Des intégrales de corrélation formées dans le corrélateur permettent de suivre la modulation du signal satellite par des symboles d'information et de calculer l'horodatage dans le signal d'entrée. Les horodatages suivent à des intervalles de 6 s pour le GPS et de 2 s pour le GLONASS et forment une sorte d'échelle de 6(2) secondes. Dans une division de cette échelle, les périodes du code de télémétrie forment une échelle de 1 ms. Une milliseconde est divisée, à son tour, en éléments distincts (puces, dans la terminologie GPS): pour GPS - 1023, pour GLONASS - 511. Ainsi, les éléments du code de télémétrie vous permettent de déterminer la distance au satellite avec une erreur de "300 m. Pour une détermination plus précise, il est nécessaire de connaître la phase du générateur de code de télémétrie. Les schémas de construction des générateurs de référence du corrélateur permettent de déterminer sa phase avec une précision de 0,01 période, soit une précision de détermination de la pseudodistance de 3 m.
Sur la base des mesures des paramètres de l'oscillation harmonique de référence générée par le système PLL, la fréquence et la phase de l'oscillation porteuse du satellite sont déterminées. Son écart par rapport à la valeur nominale donnera un décalage de fréquence Doppler, par lequel la vitesse du consommateur par rapport au satellite est estimée. De plus, les mesures de phase de la porteuse permettent d'affiner la distance au satellite avec une erreur de quelques mm.
Pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible. Afin que le consommateur puisse déterminer les coordonnées des satellites, les signaux de navigation émis par ceux-ci sont modélisés par des messages sur les paramètres de leur mouvement. Dans l'équipement du consommateur, ces messages sont sélectionnés et les coordonnées des satellites sont déterminées à l'instant souhaité.
Les coordonnées et les composants du vecteur vitesse changent très rapidement, par conséquent, les messages sur les paramètres de mouvement des satellites contiennent des informations non pas sur leurs coordonnées et les composants du vecteur vitesse, mais des informations sur les paramètres d'un certain modèle se rapprochant de la trajectoire de mouvement SC sur un intervalle de temps suffisamment long (environ 30 minutes). Les paramètres du modèle d'approximation changent assez lentement et peuvent être considérés comme constants sur l'intervalle d'approximation.
Les paramètres du modèle d'approximation sont inclus dans les messages de navigation par satellite. Le système GPS utilise le modèle de mouvement képlérien avec des éléments osculateurs. Dans ce cas, la trajectoire de vol de l'engin spatial est divisée en segments d'approximation d'une durée d'une heure. Au centre de chaque section, un point clé dans le temps est défini, dont la valeur est signalée au consommateur d'informations de navigation. De plus, le consommateur est informé des paramètres du modèle des éléments osculateurs au point nodal dans le temps, ainsi que des paramètres des fonctions se rapprochant des changements des paramètres du modèle des éléments osculateurs dans le temps à la fois précédant l'élément nodal et le suivant.
Dans l'équipement grand public, un intervalle de temps est alloué entre l'instant pour lequel la position du satellite doit être déterminée et l'instant nodal. Ensuite, à l'aide des fonctions d'approximation et de leurs paramètres extraits du message de navigation, les valeurs des paramètres du modèle des éléments osculateurs sont calculées à l'instant souhaité. A la dernière étape, en utilisant les formules usuelles du modèle képlérien, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées.
Le système Glonass utilise des modèles de mouvement différentiel pour déterminer la position exacte d'un satellite. Dans ces modèles, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées par l'intégration numérique des équations différentielles du mouvement de l'engin spatial, qui prennent en compte un nombre fini de forces agissant sur l'engin spatial. Les conditions d'intégration initiales sont fixées à l'instant nodal, qui est situé au milieu de l'intervalle d'approximation.
Comme mentionné ci-dessus, pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible, qui est déterminée dans le récepteur de navigation avec une précision d'environ 1 M. Pour plus de commodité, considérons le cas «plat» le plus simple illustré à la Fig. 8.
Détermination des coordonnées du consommateur
Chaque satellite peut être représenté comme un émetteur ponctuel. Dans ce cas, le front de l'onde électromagnétique sera sphérique. Le point d'intersection des deux sphères sera celui où se situe le consommateur.
La hauteur des orbites des satellites est d'environ 20 000 km. Par conséquent, le deuxième point d'intersection des cercles peut être écarté en raison d'une information a priori, puisqu'il est éloigné dans l'espace.
Mode différentiel
Les systèmes de navigation par satellite permettent au consommateur d'obtenir des coordonnées avec une précision d'environ 10 à 15 m.Cependant, pour de nombreuses tâches, en particulier pour la navigation dans les villes, une plus grande précision est requise. L'une des principales méthodes pour améliorer la précision de la détermination de la localisation d'un objet repose sur l'application du principe des mesures de navigation différentielle connu en radionavigation.
Le mode différentiel DGPS (GPS différentiel) vous permet de définir des coordonnées avec une précision allant jusqu'à 3 m dans un environnement de navigation dynamique et jusqu'à 1 m dans des conditions stationnaires. Le mode différentiel est mis en œuvre à l'aide d'un récepteur de contrôle GPS appelé station de référence. Il est situé en un point dont les coordonnées sont connues, dans la même zone que le récepteur GPS principal. En comparant les coordonnées connues (obtenues à la suite d'un levé géodésique de précision) avec celles mesurées, la station de référence calcule des corrections qui sont transmises aux consommateurs via un canal radio dans un format prédéterminé.
L'équipement consommateur reçoit des corrections différentielles de la station de référence et les prend en compte lors de la détermination de la localisation du consommateur.
Les résultats obtenus avec la méthode différentielle dépendent largement de la distance entre l'objet et la station de référence. L'application de cette méthode est plus efficace lorsque des erreurs systématiques dues à des causes externes (par rapport au récepteur) prévalent. Selon les données expérimentales, il est recommandé de localiser la station de référence à moins de 500 km de l'objet.
Actuellement, il existe de nombreux systèmes différentiels régionaux et locaux à larges écarts.
En tant que systèmes à large portée, il convient de noter des systèmes tels que le WAAS américain, l'EGNOS européen et le MSAS japonais. Ces systèmes utilisent des satellites géostationnaires pour transmettre les corrections à tous les utilisateurs dans leur zone de couverture.
Les systèmes régionaux sont conçus pour fournir un support de navigation pour des sections individuelles de la surface de la terre. En règle générale, les systèmes régionaux sont utilisés dans les grandes villes, sur les autoroutes et les rivières navigables, dans les ports et le long des côtes des mers et des océans. Diamètre de la zone de travail système régional varie généralement de 500 à 2000 km. Il peut comprendre une ou plusieurs stations de référence.
Les systèmes locaux ont une portée maximale de 50 à 220 km. Ils comprennent généralement une station de base. Les systèmes locaux sont généralement divisés en fonction de leur mode d'utilisation : stations différentielles locales marines, aéronautiques et géodésiques.
Développement de la navigation par satellite
L'orientation générale de la modernisation des systèmes satellitaires GPS et Glonass est associée à une augmentation de la précision des définitions de navigation, à une amélioration du service fourni aux utilisateurs, à une augmentation de la durée de vie et de la fiabilité des équipements embarqués par satellite, à une amélioration de la compatibilité avec d'autres systèmes d'ingénierie radio et le développement de sous-systèmes différentiels. La direction générale du développement des systèmes GPS et Glonass coïncide, mais la dynamique et les résultats obtenus sont très différents.
L'amélioration du système GLONASS est prévue sur la base des satellites de nouvelle génération GLONASS-M. Ce satellite aura une durée de vie accrue et émettra un signal de navigation dans la bande L2 pour des applications civiles.
Une décision similaire a été prise aux États-Unis, où le 5 janvier 1999, il a annoncé l'allocation de 400 millions de dollars pour la modernisation du système GPS associé à la transmission du code C / A à la fréquence L2 (1222,7 MHz) et l'introduction de la troisième porteuse L3 (1176, 45 MHz) sur les engins spatiaux qui seront lancés à partir de 2005. Le signal sur la fréquence L2 est prévu pour être utilisé à des fins civiles, non directement liées au danger pour la vie humaine. Il est proposé de commencer à mettre en œuvre cette solution à partir de 2003. Il a été décidé d'utiliser le troisième signal civil à la fréquence L3 pour les besoins de l'aviation civile.
Liste des abréviations
ANNP - équipement de contrôle de terrain de navigation
AKS - équipement embarqué du système de commande
AFC - Étalons de fréquence atomique
BIS - station de mesure indiscutable
BVK - complexe informatique de bord
BNP - émetteur de navigation aéroporté
BTS - système de télémétrie embarqué
BU - unité de contrôle
BUK - complexe de contrôle embarqué
BH - chroniseur embarqué
BC - centre balistique
BShV - côté SHV
GVM - disposition du poids global
SRNS - système de radionavigation par satellite
DN - diagramme de rayonnement
EU KVO - Unifié système mondial coordonner et chronométrer le soutien
ZIS - station de mesure de demande
ZRV - zone de visibilité radio
KA - vaisseau spatial
KIS - poste de commande et de mesure
KOS - stations optiques quantiques
KS - postes de contrôle
LDPS - sous-système différentiel local
ICBM - missile balistique intercontinental
MV - horodatage
NAP - équipement de navigation grand public
NKA - vaisseau spatial de navigation
NKU - complexe de contrôle au sol
NSVT - signal de navigation de haute précision
NSST - signal de navigation de précision moyenne
OG - groupement orbital
PSP - séquence pseudo-aléatoire
PKU - sous-systèmes de contrôle et de gestion
Forces de fusées stratégiques - Forces de missiles stratégiques
SK - système de correction
SKF - système de contrôle de phase
CO - système d'orientation et de stabilisation
SK - système de correction
SEP - système d'alimentation
FM - modulation par déplacement de phase
FVO - support temps-fréquence
TFR - Correction Temps Fréquence
CI - informations numériques
CS - synchroniseur central
NCC - Centre de contrôle du système GLONASS
SHV - échelle de temps
EI - informations sur les éphémérides
EO - logiciel d'éphémérides
UTC - Temps universel coordonné
Livres d'occasion
1. Systèmes d'ingénierie radio. Éd. Kazarinova Yu.M. Moscou : École supérieure, 1990.
2. Soloviev Yu.A. Systèmes de navigation par satellite. Moscou : Eco-Trends, 2000.
3. Système mondial de radionavigation par satellite GLONASS / Ed. V.N. Kharisova, A.I. Perova, V.A. Boldin. M. : IPRZhR, 1998.
4. Lipkin I.A. Systèmes de navigation par satellite. M. : Vuzovskaya kniga, 2001.
5. Système mondial de navigation par satellite GLONASS. Document de contrôle des interfaces. M. : TRICOTS VKS, 1995.