Quels systèmes de navigation mondiaux connaissez-vous. Rapport sur les "Systèmes mondiaux de navigation par satellite". Segment spatial des systèmes glonass et gps
Pendant les éruptions solaires.
Lors de perturbations géomagnétiques.
Expliquez ce qu'est le GNSS.
Pour parler de l'évolution des aides à la navigation : « d'une boussole aux systèmes de navigation par satellite (SNS) ».
Expliquer principes généraux travail navigation par satellite(CH).
Décrire le SNS actuelGPS et GLONASS, leurs composants (espace et segments au sol) et les domaines d'application.
Dites quels SNS sont en préparation pour le lancement ou en cours de développement (GALILÉE, BOUSSOLE).
Machine-to-machine est l'échange automatisé d'informations entre des appareils tels que des machines, des véhicules ou des conteneurs entre eux ou avec un centre de contrôle, en utilisant de plus en plus Internet et divers réseaux d'accès tels que le réseau communications mobiles... L'une des applications est la surveillance, le contrôle et la maintenance à distance de machines, d'équipements et de systèmes, qui sont traditionnellement appelés télémétrie.
Par exemple, dans l'industrie des distributeurs automatiques, les distributeurs automatiques sont automatiquement enregistrés sur un ordinateur central lorsqu'ils doivent être réenregistrés. Les arrêts de commande par l'opérateur de la machine peuvent être évités. Cela permet également d'éviter les temps d'arrêt. La rationalisation des processus commerciaux qui en résulte et les économies de coûts associées présentent un grand potentiel de marché pour l'industrie ainsi que pour la société. Le diagnostic embarqué est un système de diagnostic pour un véhicule. Les erreurs éventuelles sont signalées au conducteur par un témoin lumineux et sont enregistrées en permanence dans l'unité de commande correspondante.
Expliquez les échecs SNS :
Expliquez les facteurs qui contribuent à la détérioration de la précision du positionnement.
GNSS.
Navigation par satellite : concept, système, action.
SYSTÈME MONDIAL DE NAVIGATION PAR SATELLITE (GLONASS) - soviétique et russe, développé sur commande... L'un des deux systèmes mondiaux de navigation par satellite actuellement en fonctionnement. guêpes nouveau système devrait être 24 satellites se déplaçant au-dessus de la surfacedans trois plans orbitaux avec une inclinaison des plans orbitaux de 64,8 ° et une altitude de 19 100 km. Le principe de mesure est similaire au système de navigation américain... Actuellement, le projet GLONASS se développe(Roskosmos) et JSC "Rossiyskiy"
Les messages d'erreur peuvent ensuite être demandés ultérieurement par l'atelier spécialisé via des interfaces standardisées. Initialement, les données étaient enregistrées et évaluées de différentes manières selon différents principes de différents fabricants, parfois même d'un modèle à l'autre. Le terme « localisation » résume plusieurs méthodes pour déterminer l'emplacement d'objets distants. La base est généralement une mesure de distance effectuée par un observateur à l'aide de signaux qui retournent à l'émetteur depuis l'objet à localiser.
AVEC  Tant que l'humanité existera, tant la question de savoir comment déterminer sa localisation sur terre et en mer, dans une forêt ou dans une ville se résout. Aujourd'hui, le besoin de naviguer, comme les anciens voyageurs et navigateurs, à l'aide des étoiles ou de la boussole a disparu. L'ère de la découverte des ondes radio a considérablement simplifié la tâche de la navigation et a ouvert de nouvelles perspectives pour l'humanité dans de nombreux domaines de la vie et de l'activité, et avec la découverte de la possibilité de conquérir l'espace extra-atmosphérique, une énorme percée a été réalisée dans la détermination des coordonnées de l'emplacement d'un objet sur Terre. Satellites artificiels Les Terres sont devenues des stations de référence pour la radionavigation et aujourd'hui les systèmes de navigation par satellite sont devenus accessibles non seulement aux militaires ou marins, mais aussi aux simples citoyens, particuliers et entreprises pour qui la navigation est nécessaire.
Tant que l'humanité existera, tant la question de savoir comment déterminer sa localisation sur terre et en mer, dans une forêt ou dans une ville se résout. Aujourd'hui, le besoin de naviguer, comme les anciens voyageurs et navigateurs, à l'aide des étoiles ou de la boussole a disparu. L'ère de la découverte des ondes radio a considérablement simplifié la tâche de la navigation et a ouvert de nouvelles perspectives pour l'humanité dans de nombreux domaines de la vie et de l'activité, et avec la découverte de la possibilité de conquérir l'espace extra-atmosphérique, une énorme percée a été réalisée dans la détermination des coordonnées de l'emplacement d'un objet sur Terre. Satellites artificiels Les Terres sont devenues des stations de référence pour la radionavigation et aujourd'hui les systèmes de navigation par satellite sont devenus accessibles non seulement aux militaires ou marins, mais aussi aux simples citoyens, particuliers et entreprises pour qui la navigation est nécessaire.
Cela se produit généralement par réflexion. Laser d'occasion, signaux sonores, radars. L'emplacement est différent de l'emplacement des procédures actives et ne doit pas être confondu avec celui-ci. Le National National Satellite, qui est le système satellitaire national, est le système satellitaire américain. Il a été construit par le département américain de la Défense à des fins militaires dans les années 1970 et est pleinement opérationnel depuis le milieu des années 1990.
Est un système de navigation par satellite exploité par le ministère de la Défense Fédération Russe... Le développement parallèle et indépendant de deux systèmes équivalents pendant la guerre froide était pour des raisons militaires. Il s'agit d'un système européen de navigation par satellite, principalement destiné au secteur civil.
Concept : système de navigation par satellite
- un système électrotechnique intégré, composé d'une combinaison d'équipements terrestres et spatiaux, conçu pour déterminer l'emplacement (coordonnées géographiques et altitude), ainsi que les paramètres de mouvement (vitesse et direction du mouvement, etc.) pour le sol, l'eau et l'air objets.
C'est le système de navigation de la République populaire de Chine. La constellation de satellites de trois satellites géosynchrones a été spécialement conçue pour le Japon, mais d'autres régions d'Asie-Pacifique en bénéficieront également. Satellite systèmes de navigation sont utilisés pour déterminer la position avec une précision variable. En règle générale, il s'agit de déterminer votre propre position sur une carte virtuelle. Par exemple, dans un smartphone ou une navigation automobile.
Noter. Les systèmes mondiaux de navigation par satellite ne sont pas des systèmes de poursuite. Ce sont des systèmes de positionnement. Le système de positionnement devra non seulement déterminer la position, mais également un canal de retour vers le point de fixation de la position. Les systèmes de navigation n'ont pas ce canal de retour.
Système:
Les principaux éléments d'un système de navigation par satellite :
Constellation orbitale
constitué de plusieurs (de 2 à 30) satellites émettant des signaux radio spéciaux ; Système de contrôle et de surveillance au sol, y compris des unités pour mesurer la position actuelle des satellites et leur transmettre les informations reçues pour corriger les informations sur les orbites ;
Réception du matériel client
(« navigateurs satellites ») utilisés pour déterminer les coordonnées ;
Optionnel
:
système radio d'information pour transmettre des corrections aux utilisateurs, ce qui peut améliorer considérablement la précision de la détermination des coordonnées.
Emplacement et différence d'emplacement
Heureusement, les termes « emplacement » et « positionnement » sont combinés ou utilisés comme synonymes l’un pour l’autre. Mais il y a une petite mais subtile différence. La recherche, c'est quand quelqu'un veut localiser une autre personne ou un autre objet. Cela nécessite que cette personne ou cet objet soit équipé d'un récepteur et d'un émetteur. Le récepteur détermine sa position, et l'émetteur transmet cette position au chercheur. Il est nécessaire que le canal de retour de l'objet à rechercher ou de la personne soit présent.
Action: Le principe de fonctionnement des systèmes de navigation par satellite repose sur la mesure de la distance de l'antenne sur l'objet (dont les coordonnées doivent être obtenues) aux satellites dont la position est connue avec une grande précision. Le tableau des positions de tous les satellites s'appelle un almanach, qui doit être disponible pour tout récepteur satellite avant de commencer les mesures. Typiquement, le récepteur stocke l'almanach en mémoire depuis le dernier arrêt, et s'il n'est pas obsolète, il l'utilise instantanément. Chaque satellite transmet l'intégralité de l'almanach dans son signal.
Ce n'est qu'alors qu'il peut y avoir une place. Le positionnement est indépendant de l'emplacement. Le positionnement pur n'est pas encore un emplacement s'il n'y a pas de canal de retour. Ce n'est que si, par exemple, une position peut être transmise via un téléphone mobile, qu'il est possible de publier.
Il est principalement destiné à un usage militaire. AVEC signal reçu un emplacement plus précis peut être déterminé la première fois. Cela a conduit à une augmentation des systèmes de navigation pour les véhicules. Cela améliore le positionnement. Le nombre de satellites est de 28 et couvre toute la surface de la Terre, couvrant les signaux reçus.
Ainsi, connaissant les distances à plusieurs satellites du système, à l'aide de constructions géométriques classiques, basées sur l'almanach, il est possible de calculer la position d'un objet dans l'espace. La méthode de mesure de la distance du satellite à l'antenne réceptrice repose sur la certitude de la vitesse de propagation des ondes radio. Pour permettre de mesurer le temps de propagation d'un signal radio, chaque satellite du système de navigation émet des signaux horaires précis, en utilisant ceux précisément synchronisés avec l'heure du système dans le cadre de son signal. horloge atomique.
Cependant, son utilisation est limitée à la majeure partie de l'Asie et du Pacifique. Le système mondial est encore en construction. En théorie, les signaux de trois satellites sont nécessaires pour déterminer la position et la hauteur exactes du récepteur. A savoir, les distances des satellites peuvent être déterminées à partir des temps de trajet des signaux. Chacune de ces distances définit une sphère autour du satellite correspondant sur lequel se trouve le récepteur. Les trois surfaces sphériques se coupent alors en deux points maximum. L'un d'eux est situé à plusieurs milliers de kilomètres de la surface de la terre et peut donc être mis au rebut ; l'autre est la position souhaitée du récepteur, donc un quatrième signal satellite est nécessaire, avec lequel alors l'heure exacte dans le récepteur et, par conséquent, la durée du signal, donc finalement la distance peut être déterminée.
Lorsqu'un récepteur satellite fonctionne, son horloge est synchronisée avec l'heure du système, et lors de la réception ultérieure de signaux, le délai entre l'heure d'émission contenue dans le signal lui-même et l'heure de réception du signal est calculé. Avec ces informations, le récepteur de navigation calcule les coordonnées de l'antenne. La plupart des récepteurs de navigation utilisent l'effet Doppler pour obtenir des informations sur la vitesse. De plus, en accumulant et en traitant ces données pendant un certain temps, il devient possible de calculer des paramètres de mouvement tels que la vitesse (actuelle, maximale, moyenne), la distance parcourue, etc. En réalité, le travail du système est beaucoup plus compliqué .
Certains des problèmes qui nécessitent des techniques spéciales pour les résoudre sont énumérés ci-dessous :
Manque d'horloges atomiques dans la plupart des récepteurs de navigation. Cet inconvénient est généralement éliminé par la nécessité d'obtenir des informations d'au moins trois (navigation bidimensionnelle à une altitude connue) ou quatre (navigation tridimensionnelle) satellites ; (S'il y a un signal d'au moins un satellite, vous pouvez déterminer l'heure actuelle avec une bonne précision). Inhomogénéité du champ gravitationnel de la Terre, affectant les orbites des satellites ; Inhomogénéité de l'atmosphère, en raison de laquelle la vitesse et la direction de propagation des ondes radio peuvent varier dans certaines limites ; Réflexions de signaux provenant d'objets au sol, ce qui est particulièrement visible en ville ; L'impossibilité de placer des émetteurs de forte puissance sur les satellites, c'est pourquoi la réception de leurs signaux n'est possible qu'en visibilité directe à l'air libre.
D'autres systèmes modernes sont actuellement en cours de développement. construits ou planifiés par les Européens, les Chinois et les Indiens. Le timbre français suivant montre les orbites et le satellite du système Galileo. Les deux premiers satellites opérationnels ont été allumés.
Les coordonnées géographiques ainsi que la hauteur au-dessus d'un ellipsoïde de référence spécifique peuvent également être calculées directement à partir des coordonnées spatiales. De plus, entre les points de mesure, les coordonnées bidimensionnelles des points de mesure sur la surface de référence, ou encore des distances et des directions peuvent être obtenues.
Histoire et perspectives de développement.
L'histoire du développement des systèmes de navigation par satellite remonte à plus de 40 ans. Le début du développement du système national de radionavigation par satellite (SRNS), comme on le croit le plus souvent, a été le lancement le 4 octobre 1957 en Union soviétique du premier satellite terrestre artificiel (AES) de l'histoire de l'humanité. Pour la première fois, des déclarations sur la nécessité de créer un tel système répondant aux besoins de nombreux ministères ont été faites à scientifique et technique conseil en 1946 dans les discours des spécialistes de l'Institut technique radio de recherche scientifique de Leningrad. Au milieu des années 70, le système de navigation par satellite Cicada a été créé en URSS et dans les années 60 aux États-Unis - le système Transit, qui a par la suite subi de nombreux changements et améliorations technologiques. Ces systèmes ont été développés par arrêté du ministère de la Défense des pays et étaient spécialisés pour la navigation globale opérationnelle des objets mobiles au sol, mais seulement en décembre 1976 la résolution du Comité central du PCUS et du Conseil des ministres de l'URSS "Sur le déploiement du système de navigation spatiale unifiée" a été adopté. Avec les systèmes de navigation par satellite disponibles à l'époque, les consommateurs n'étaient pas satisfaits de l'exactitude des résultats et du temps nécessaire pour déterminer les coordonnées - la création de systèmes de nouvelle génération était nécessaire. En conséquence, le système de navigation par satellite a été inventé en Union soviétique au début des années 80 du siècle dernier. Les systèmes de navigation par satellite qui sont nés s'appelaient GPS - aux États-Unis et GLONASS - en URSS. En conséquence, le premier satellite américain a été lancé en février 1978, et le premier soviétique plus tard - le 12 octobre 1982. Le 24 septembre 1993, GLONASS a été officiellement mis en service. En 1995, sa constellation de satellites se composait de 24 appareils. Par la suite, en raison d'un financement insuffisant, le nombre de satellites en exploitation a été réduit. En août 2001, le programme cible fédéral "Global Navigation System" a été adopté, selon lequel une couverture complète du territoire de la Russie était déjà prévue ? début 2008, et le système aurait atteint une échelle mondiale début 2010. Pour résoudre ce problème, il était prévu d'effectuer six lancements de fusées porteuses en 2007, 2008 et 2009 et de mettre 18 satellites en orbite - ainsi, d'ici fin 2009, la constellation devrait à nouveau comprendre 24 véhicules. Dans le même temps, la précision de détermination de la localisation des utilisateurs du système atteindra 1 à 5 m, comme celle du GPS. Selon l'Institut central de recherche en génie mécanique, à ce jour, la composition de constellation orbitale système GLONASS, il y a 19 engins spatiaux. 14 d'entre eux sont utilisés conformément à leur destination, 3 - au stade de l'entrée dans le système (ils ont été lancés le 25 septembre 2008), 1 - temporairement retirés pour maintenance, 1 - au stade de la déconnexion. Selon les prévisions, d'ici la fin de 2008, trois autres appareils anciens seront retirés du système.
Mais on utilise également de plus en plus de récepteurs capables de recevoir et de traiter simultanément les signaux satellites de plusieurs systèmes de navigation, ce qui augmente la précision et la fiabilité du positionnement. Ces corrections sont fournies sur le réseau universitaire, ainsi que accessibles au public via Internet et peuvent être utilisées directement avec les destinataires professionnels. Pour les récepteurs bon marché avec sortie de données brutes, vous pouvez utiliser un Logiciel pour appliquer les données de correction.
Le positionnement réel d'un système de navigation par satellite est basé sur la mesure du temps de transit des signaux radio émis par les satellites. Les distances peuvent être déterminées à partir des différences de temps mesurées entre le satellite et le récepteur et la vitesse de propagation radio connue. Par conséquent, la condition préalable est que les horloges de l'expéditeur et du destinataire soient synchronisées et fonctionnent exactement de la même manière.
Le programme à long terme pour le développement du système de navigation spatiale est mis en œuvre selon les étapes élargies suivantes :
Étape 1
(jusqu'en 2003). Maintenir le SPS GLONASS au minimum  bas niveau par les lancements de l'engin spatial GLONASS (Fig.), modernisation du circuit d'échange d'informations du complexe de contrôle au sol, équipement étendu des consommateurs avec des équipements fonctionnant sur les signaux de deux systèmes : GLONASS et GPS. Développement et création du SC "Glonass-M".
bas niveau par les lancements de l'engin spatial GLONASS (Fig.), modernisation du circuit d'échange d'informations du complexe de contrôle au sol, équipement étendu des consommateurs avec des équipements fonctionnant sur les signaux de deux systèmes : GLONASS et GPS. Développement et création du SC "Glonass-M".
Le récepteur calcule sa position dans espace en trois dimensions en calculant l'intersection de trois coquilles sphériques. Au centre de chaque sphère se trouve l'un des satellites observés, dont le rayon est déterminé par la distance mesurée au récepteur. Le débit d'au moins trois satellites doit être accepté pour le calcul de la position. Pour corriger davantage l'erreur de synchronisation dans les mesures de temps de transit, un quatrième satellite est nécessaire.
Erreurs de mesure de distance qui conduisent finalement à un positionnement erroné, principalement dues aux influences atmosphériques, à la propagation par trajets multiples ou à une constellation défavorable du satellite actuellement visible. On suppose que les erreurs locales affectent le récepteur de référence et le mobile utilisés pour la navigation de la même manière ou d'une manière similaire. Par l'écart entre la position réelle mesurée et connue de la station de référence, le temps de fonctionnement réel peut être déterminé avec précision et les différences transmises au rover.
N.-É.  appuyez sur 2
(jusqu'en 2005) Déploiement d'une constellation orbitale fonctionnelle de jusqu'à 18 unités basée sur le vaisseau spatial "Glonass-M" (fig.) d'une masse de 1415 kg. et une période d'existence active de 7 ans, ce qui est nettement plus long que celui des satellites de la série précédente. Transition vers une nouvelle gamme de fréquences du signal de navigation. Développement de la technologie de support du temps des éphémérides à l'aide de mesures intersatellites. Extension de la gamme et du nombre de consommateurs fonctionnant sur les signaux du GLONASS et du GPS SPS. Développement et création du vaisseau spatial de petite taille "Glonass-K".
appuyez sur 2
(jusqu'en 2005) Déploiement d'une constellation orbitale fonctionnelle de jusqu'à 18 unités basée sur le vaisseau spatial "Glonass-M" (fig.) d'une masse de 1415 kg. et une période d'existence active de 7 ans, ce qui est nettement plus long que celui des satellites de la série précédente. Transition vers une nouvelle gamme de fréquences du signal de navigation. Développement de la technologie de support du temps des éphémérides à l'aide de mesures intersatellites. Extension de la gamme et du nombre de consommateurs fonctionnant sur les signaux du GLONASS et du GPS SPS. Développement et création du vaisseau spatial de petite taille "Glonass-K".
Utilisation avec un récepteur bon marché et un logiciel gratuit
Avant de partir, le menu doit être enregistré à ce stade. Si le firmware modifié pose problème, la version d'origine peut être restaurée de la même manière. Il comprend plusieurs outils pour transformer, visualiser et calculer des solutions de localisation en temps réel. Un post-traitement des données enregistrées est possible.
En plus des interfaces adaptées à l'interface smartphone, on retrouve des réglages quasiment identiques. À des fins de test, l'application est très utile car un gros ordinateur portable n'est pas nécessaire et les paramètres peuvent être modifiés rapidement. Les « options de solution » restent inchangées.
Étape 3
(jusqu'en 2010). Déploiement d'une constellation orbitale standard sur la base d'un satellite "Glonass-K" de petite taille, plus avancé et à fuite (pas de chiffre, car il est en cours de développement) avec une durée de vie active nettement plus longue allant jusqu'à 10 ans, une masse inférieure , environ 700 kg, soit deux fois moins que celui du "Glonass-M". Extension de l'utilisation de la liaison radio inter-satellites pour résoudre les problèmes d'assistance autonome en temps éphéméride, de contrôle opérationnel et de surveillance des engins spatiaux, garantissant l'intégrité. Création d'un réseau au sol de stations de surveillance GLONASS SPS et ajouts fonctionnels. Equiper la flotte des consommateurs en NAP, travailler sur les signaux GLONASS, GPS, Galileo.
Les satellites de navigation de cette série seront lancés en orbite soit par des lancements uniques par la fusée porteuse Soyouz-2 avec l'étage supérieur Fregat, soit par six véhicules dans un seul paquet - par la fusée porteuse Proton avec l'étage supérieur Briz-M. De plus, leur mise en orbite est possible avec l'aide du lanceur indien GSLV. Ainsi, en 2004 à Moscou un accord a été signé avec l'Inde sur le lancement de deux satellites de navigation en 2006-2008. Les appareils "Glonass-K" sont créés sur la base d'une plate-forme non pressurisée plus progressive, qui, selon les experts, impose des exigences accrues à l'équipement et à la base d'éléments, qui devront fonctionner dans des conditions espace ouvert... Peut-être que certains des éléments utilisés seront étrangers, mais comme le système de navigation est russe, il devrait principalement fonctionner sur nos éléments, sur nos appareils. A ce jour, la possibilité technologique d'installer le module de navigation GLONASS dans téléphones portables... Des téléphones équipés de navigateurs GPS existent déjà et sont largement utilisés dans le monde entier, y compris en Russie. Il existe déjà un certain nombre de récepteurs de navigation GPS / GLONASS sur le marché des équipements de navigation, ils sont produits spécifiquement pour la Russie et ont un objectif très différent.
La sortie de la solution de localisation est configurée via l'onglet Sorties de données, et les données de la base et du mobile sont configurées via l'onglet Enregistrements de données. La possibilité de télécharger deux solutions montre clairement l'effet des données de correction. Il n'est pas destiné à un usage commercial ou de sécurité.
L'Université d'Aschaffenburg n'est pas responsable de l'actualité, de la disponibilité, de l'exactitude et de l'exhaustivité des données fournies. L'Université des sciences appliquées d'Aschaffenburg se réserve expressément le droit de modifier l'offre en tout ou en partie sans annonce séparée, de compléter, supprimer ou arrêter la publication temporairement ou définitivement. Il n'est pas responsable des dommages subis ou subis par l'utilisateur, qu'ils soient matériels ou immatériels, sauf s'ils résultent d'un dol ou d'une négligence grave.
Les experts estiment que les principales tâches de la période actuelle de récupération et de développement de GLONASS sont :
Augmenter la fiabilité et augmenter la période de fonctionnement permanent du vaisseau spatial Glonass jusqu'à 20 ans ;
Développer une constellation orbitale jusqu'à 6 avions avec 48 satellites afin d'assurer un positionnement de haute précision en terrain fermé (un tel programme a déjà été adopté par les États-Unis) ;
Ceci ne s'applique pas en cas d'atteinte à la vie, au corps et à la santé. Les données d'accès et des informations supplémentaires sur Caster sont disponibles sur le lien suivant. Le système, dont le siège est au Colorado, est accessible à tous, gratuitement et partout dans le monde.
Les signaux qui nous apparaissent désormais comme une loi naturelle sont plus sujets à la manipulation qu'on ne le pense. En tout cas, cela parle de certains cas qui se sont produits ces derniers mois sur la mer Noire. L'appareil de navigation a montré au capitaine l'aéroport international de Guelendjik, long de 32 kilomètres - définitivement la mauvaise adresse. Le capitaine n'était pas seul avec ses problèmes de navigation : 20 autres navires ont été touchés par l'incident.
Assurer la sécurité électronique et l'indépendance du système ;
Considérer la faisabilité d'exclure le système de sauvetage Cospas du système « passagers », les capteurs pour déterminer la localisation des explosions nucléaires, communications par satellite qui ne prennent que de l'espace de charge utile.
Et l'essentiel est d'attirer de vrais spécialistes capables de rapporter toute la vérité sur GLONASS. GLONASS est une priorité de tous les programmes spatiaux, car sans lui, dans quelques années, la Russie restera sans défense. Sans GLONASS, une réponse asymétrique à la défense antimissile américaine et à d'autres menaces potentielles est fondamentalement impossible. C'est pourquoi le président exige avec tant d'insistance que le GLONASS soit relancé dès que possible.
Principe d'opération.
Les satellites GLONASS émettent en continu deux types de signaux de navigation : un signal de navigation de précision standard (ST) dans la bande L1 (1,6 GHz) et un signal de navigation de haute précision (HT) dans les bandes L1 et L2 (1,2 GHz). Les informations fournies par le signal de navigation ST sont disponibles pour tous les utilisateurs de manière permanente et globale et permettent, lors de l'utilisation des récepteurs GLONASS, de déterminer :
* coordonnées horizontales avec une précision de 50-70 m (99,7% de probabilité);
* coordonnées verticales avec une précision de 70 m (99,7 % de probabilité) ;
* composantes du vecteur vitesse avec une précision de 15 cm/s (99,7% de probabilité)
* heure précise avec une précision de 0,7 µs (probabilité de 99,7 %).
Ces précisions peuvent être considérablement améliorées en utilisant une méthode de navigation différentielle et/ou des méthodes de mesure spéciales supplémentaires.
Le signal BT est principalement destiné aux consommateurs du ministère russe de la Défense et son utilisation non autorisée n'est pas recommandée. La question de la fourniture du signal BT aux consommateurs civils est à l'étude.
Pour déterminer les coordonnées spatiales et l'heure exacte, il est nécessaire de recevoir et de traiter les signaux de navigation d'au moins 4 satellites GLONASS. Lors de la réception des signaux radio de navigation GLONASS, le récepteur, à l'aide de méthodes d'ingénierie radio bien connues, mesure les distances par rapport aux satellites visibles et mesure leur vitesse.
Simultanément aux mesures dans le récepteur, le traitement automatique des horodatages et des informations numériques contenues dans chaque signal radio de navigation est effectué. Informations numériques décrit la position d'un satellite donné dans l'espace et le temps (éphémérides) par rapport à une seule échelle de temps pour le système et dans un système de coordonnées cartésiennes liées géocentriques. De plus, les informations numériques décrivent la position d'autres satellites dans le système (almanach) sous la forme d'éléments képlériens de leurs orbites et contiennent d'autres paramètres. Les résultats de mesure et les informations numériques reçues sont les données initiales pour résoudre le problème de navigation afin de déterminer les coordonnées et les paramètres de mouvement. Le problème de navigation est résolu automatiquement dans le dispositif informatique du récepteur en utilisant la méthode bien connue des moindres carrés. À la suite de la solution, trois coordonnées de l'emplacement du consommateur, la vitesse de son mouvement sont déterminées et l'échelle de temps du consommateur est liée à l'échelle de temps universel coordonné (UTC) de haute précision.
GLONASS aujourd'hui.
Actuellement, il y a onze satellites GLONASS-M (un lancé en 2003, deux - en 2005, trois - en 2006) parmi les engins spatiaux opérationnels (SC), qui ont une durée de vie active garantie de 7 ans. Ces satellites émettent, contrairement aux appareils de la génération précédente, déjà deux signaux pour les consommateurs civils, ce qui peut augmenter considérablement la précision du positionnement.
Conformément aux instructions du Président de la Fédération de Russie, une constellation minimale de 18 satellites devrait être déployée en 2007. Une constellation complète de 24 satellites conformément au programme cible fédéral "Global Navigation System" devrait être déployée en 2010.
Les satellites GLONASS-M resteront dans la constellation orbitale au moins jusqu'en 2015. Les essais en vol de satellites à fuite de nouvelle génération "GLONASS-K" aux caractéristiques améliorées (durée de garantie étendue à 10 ans et troisième fréquence de la bande L pour les consommateurs civils) devraient débuter en 2009. Ce satellite sera deux fois plus léger que son prédécesseur (environ 700 kg contre 1415 kg pour Glonass-M)
À l'avenir, après le déploiement d'une constellation orbitale de 24 engins spatiaux, pour la maintenir, il sera nécessaire d'effectuer un lancement groupé par an de deux engins spatiaux GLONASS-K sur le porteur Soyouz, ce qui réduira considérablement les coûts d'exploitation.
Le 29 novembre 2006, lors de sa visite au RIRV, le ministre de la Défense Sergueï Ivanov a annoncé que le système GLONASS serait bientôt disponible pour un usage civil.
Le 18 mai 2007, le président russe Vladimir Poutine a signé un décret selon lequel l'accès au système de navigation russe GLONASS sera fourni gratuitement et sans restrictions aux consommateurs russes et étrangers.
Les satellites GLONASS seront lancés depuis le cosmodrome de Plesetsk.
MOSCOU, 9 avril - RIA Novosti. Le lancement futur des satellites de navigation GLONASS sera effectué non pas depuis Baïkonour, mais depuis le cosmodrome de Plesetsk sur des fusées porteuses Soyouz-2, a déclaré Alexander Kvasnikov, commandant adjoint des forces spatiales russes. «Il est prévu de transférer progressivement les lancements d'engins spatiaux du système de navigation mondial russe GLONASS de Baïkonour au cosmodrome de Plesetsk. Ces lancements devraient être effectués sur des lanceurs Soyouz-2 modernisés », a déclaré lundi Kvasnikov, s'exprimant lors d'un forum international sur la navigation par satellite.
Selon lui, le transfert des lancements de Baïkonour à Plesetsk assurera l'indépendance de la Russie dans la mise en orbite de son propre vaisseau spatial.
Comme l'a souligné le commandant adjoint des forces spatiales, la portée des navigateurs par satellite GLONASS dans les troupes s'étend de la fourniture à un militaire individuel d'informations sur ses coordonnées à la fourniture d'informations de navigation à des unités militaires entières.
« Avec la mise en service des satellites du système GLONASS, une unité compacte est installée à bord du lanceur, fournissant des mesures de trajectoire continues de haute précision pendant le vol de la fusée. Auparavant, une méthode était utilisée qui nécessitait l'implication d'un grand nombre de personnes et de fonds, basée sur la garantie du contrôle du vol de la fusée par des points au sol de mesures de trajectoire », a déclaré Kvasnikov.
Selon lui, les forces spatiales russes testent actuellement des équipements au sol et portables pour le système de navigation GLONASS.
« Son application permettra l'utilisation de récepteurs GLONASS dans toutes les conditions météorologiques, fournissant un référencement de haute précision en coordonnées et en temps, en particulier sur des terrains très accidentés et montagneux », a déclaré le commandant adjoint.
Comparaison du GLONASS et du GPS.

Considérons quelques-unes des caractéristiques des principaux systèmes de navigation par satellite (NAVSTAR et GLONASS) : les deux systèmes ont un double objectif - militaire et civil, ils émettent donc deux types de signaux : l'un avec une précision réduite dans la détermination des coordonnées (~ 100 m ) à usage civil et l'autre à haute précision (~ 10 -15 m et plus précisément) à usage militaire. Les satellites NAVSTAR sont situés dans six avions à une altitude d'environ 20 180 km. Les satellites GLONASS (code "Hurricane") sont situés dans trois plans à une altitude d'environ 19 100 km. Le nombre nominal de satellites dans les deux systèmes est de 24. La constellation NAVSTAR a été entièrement achevée en avril 1994 et a été maintenue depuis lors, la constellation GLONASS a été entièrement déployée en décembre 1995, mais s'est depuis considérablement dégradée. Il est actuellement en cours de restauration active. Les deux systèmes utilisent des signaux basés sur la soi-disant. "Séquences pseudo-bruit", dont l'utilisation leur confère une haute immunité au bruit et une fiabilité à faible puissance de rayonnement des émetteurs. Conformément à l'objectif, chaque système a deux fréquences de base - L1 (précision standard) et L2 (haute précision). Pour NAVSTAR L1 = 1575,42 MHz et L2 = 1227,6 MHz. GLONASS utilise la division de fréquence des signaux, c'est-à-dire que chaque satellite fonctionne à sa propre fréquence et, par conséquent, L1 se situe dans la plage de 1602,56 à 1615,5 MHz et L2 de 1246,43 à 1256,53. Le signal de L1 est disponible pour tous les utilisateurs, le signal de L2 n'est disponible que pour les militaires (c'est-à-dire qu'il ne peut pas être déchiffré sans une clé secrète spéciale). Chaque satellite du système, en plus des informations de base, transmet également des informations auxiliaires nécessaires au fonctionnement continu de l'équipement de réception. Cette catégorie comprend l'almanach complet de l'ensemble de la constellation de satellites, transmis séquentiellement sur plusieurs minutes. Ainsi, le démarrage de l'appareil récepteur peut être assez rapide s'il contient un almanach à jour (environ 1 minute) - c'est ce qu'on appelle un "démarrage à chaud", mais cela peut prendre jusqu'à 15 minutes si le récepteur est forcé pour recevoir un almanach complet - c'est-à-dire n. Démarrage à froid. Le besoin d'un "démarrage à froid" survient généralement lorsque le récepteur est allumé pour la première fois, ou s'il n'a pas été utilisé pendant une longue période.Mesure différentielle
Des modèles séparés de récepteurs satellites permettent la production de ce qu'on appelle. "Mesure différentielle" des distances entre deux points avec une grande précision (centimètres). Pour cela, la position du navigateur est mesurée en deux points avec un intervalle de temps court. Dans le même temps, bien que chacune de ces mesures ait une précision de l'ordre de 10 à 15 mètres sans système de correction au sol et de 10 à 50 cm avec un tel système, la distance mesurée a une erreur beaucoup plus faible, car les facteurs interférant avec la mesure (erreur sur les orbites des satellites, inhomogénéité atmosphérique, etc.) dans ce cas se déduisent mutuellement. De plus, il existe plusieurs systèmes qui envoient des informations de clarification ("correction différentielle aux coordonnées"), ce qui permet d'augmenter la précision de mesure des coordonnées du récepteur jusqu'à dix centimètres. La correction différentielle est basée sur des objets géostationnaires (satellites, stations de base au sol), généralement payants (le décodage du signal n'est possible que par un récepteur spécifique après avoir payé l'« abonnement au service »). Actuellement (2006), il existe un système européen gratuit EGNOS (European Geostationary Navigation Overlay Services), basé sur deux satellites géostationnaires, offrant une grande précision (jusqu'à 30 cm), mais fonctionnant par intermittence et peu fiable. En Amérique du Nord, son pendant est le système WAAS.
INCONVÉNIENTS DU SYSTÈME GPS.
Malgré tous les avantages, les systèmes GPS ont aussi des inconvénients. Par exemple, le récepteur GPS peut être désactivé à tout moment, par exemple pour des raisons de sécurité aux États-Unis. De plus, l'introduction de la technologie GPS implique la disponibilité de cartes électroniques détaillées avec une échelle allant jusqu'à 100 m, qui ne sont pas disponibles dans le commerce dans tous les pays. Il est impossible de ne pas mentionner le fait que lors du calcul des coordonnées, le système satellitaire permet des erreurs. La nature de ces erreurs est différente. Les principales sources d'erreurs affectant la précision des calculs de navigation dans un système GPS sont notamment :
Erreurs dues au mode Disponibilité sélective (S/A). En utilisant ce mode, le département américain de la Défense réduit délibérément la précision de positionnement des civils. Dans le mode S/A, des erreurs d'origine artificielle sont formées, introduites dans le signal à bord des satellites GPS afin de grossir les mesures de navigation. De telles erreurs sont des données incorrectes sur l'orbite du satellite et une distorsion de ses lectures d'horloge dues à l'introduction d'un signal pseudo-aléatoire supplémentaire. La valeur de l'écart type dû à l'influence de ce facteur est d'environ 30 m.
Erreurs associées à la propagation des ondes radio dans l'ionosphère. Les délais de propagation des signaux lors de leur passage dans la haute atmosphère conduisent à des erreurs de l'ordre de 20 à 30 m le jour et de 3 à 6 m la nuit. Malgré le fait que le message de navigation émis par le satellite GPS contienne les paramètres du modèle de l'ionosphère, la compensation du retard réel est, au mieux, de 50 %.
Erreurs associées à la propagation des ondes radio dans la troposphère. Ils surviennent lorsque les ondes radio traversent la basse atmosphère. Les valeurs d'erreurs de ce type lors de l'utilisation de signaux avec le code C/A ne dépassent pas 30 m.
Erreur d'éphéméride. Les erreurs sont causées par l'écart entre la position réelle du satellite GPS et sa position calculée, qui est établie à partir des données du signal de navigation transmises par le satellite. La valeur d'erreur est généralement inférieure à 3 m.
L'erreur de dérive de l'échelle de temps des satellites est causée par l'écart entre les échelles de temps des différents satellites. Éliminé par les stations de suivi au sol ou en compensant la dérive de l'échelle de temps en mode de positionnement différentiel.
L'erreur dans la détermination de la distance au satellite est un indicateur statistique. Il est calculé pour un satellite spécifique et un intervalle de temps donné. L'erreur n'est pas corrélée avec d'autres types d'erreurs. Sa taille ne dépasse généralement pas 10 m.
INCONVÉNIENTS DU SYSTÈME GLONASS :
La nécessité de déplacer la gamme de fréquences vers la droite, car actuellement GLONASS interfère avec le travail des communications mobiles par satellite et de la radioastronomie
Lors du changement des éphémérides des satellites, les erreurs de coordonnées en mode normal augmentent de 25 à 30 m et en mode différentiel - dépassent 10 m;
Lors de la correction de la seconde en cours, la continuité du signal GLONASS est perturbée. Ceci conduit à de grosses erreurs dans la détermination des coordonnées du lieu du consommateur, ce qui est inacceptable pour l'aviation civile ;
Difficulté à recalculer les données des systèmes GLONASS et GPS en raison de l'absence d'une matrice de transition officiellement publiée entre les systèmes de coordonnées utilisés.
L'Union européenne développe un système satellitaireNavigation Galilée... La Chine développe également sa propresystème de navigation "Beidou", d'ici fin 2008, il couvrira le territoire de la Chine et de la plupart des pays asiatiques voisins.
Galilée- système satellitela navigationdéveloppé par l'Union européenne. Un concept unifié a été adopté en 1999, et le plan de développement initial a été approuvé en 2003 et prévoyait le lancement du système en 2008.
Cependant, il a été contrecarré en raison de désaccords entre les gouvernements des pays de l'UE et de la réticence des entreprises privées à investir dans Galileo. Le consortium privé était composé d'EADS, Thales, Inmarsat, Alcatel-Lucent, Finmeccanica, AENA, Hispasat et d'un groupe allemand comprenant Deutsche Telekom et German Aerospace Center.
En mai 2007, le consortium s'est retiré du projet et la Commission européenne a repris la direction de Galileo. Désormais, sur les 30 satellites prévus, un seul est en orbite, le second devrait être mis en orbite le 27 avril 2008.
À l'heure actuelle, l'UE a dépensé environ 1 milliard d'euros pour le projet
Contrairement au GPS américain et au GLONASS russe, le système Galileo n'est contrôlé ni par le gouvernement ni par des institutions militaires. Le développement est réalisé par l'ESA. Le coût total de la création du système est estimé à 3,8 milliards d'euros. Le premier satellite du système Galileo a été livré au cosmodrome de Baïkonour le 30 novembre 2005. Le 28 décembre 2005 à 8h19 à l'aide du lanceur Soyouz-FG, le vaisseau spatial GIOVE-A (Galileo In-Orbit Validation Element) a été lancé sur une orbite de conception à une altitude de plus de 23 000 km avec une inclinaison de 56 °.dimensions: longueur - 1,2 m, diamètre - 1,1 m.La période d'existence active est de 12 ans. ESA L'Agence spatiale européenne est une organisation internationale créée en 1975 dans le but d'unir les efforts d'exploration spatiale au profit des Européens de Galilée.
Influence de l'ionosphère sur les caractéristiques des signaux radio transionosphériques
Les ondes électromagnétiques se propageant dans l'ionosphère subissent une grande variété de perturbations. La principale caractéristique de l'ionosphère, qui détermine le changement des paramètres de l'onde radio, est le contenu électronique intégral (total)je (t ) ou ses dérivées (dans le temps et dans l'espace)je ´ t (t ), JE ' X (t ) et JE ' oui (t ) le long du chemin de propagation.
Les changements TEC peuvent être grossièrement divisés en réguliers et irréguliers. Les changements réguliers (saisonniers, diurnes), au moins pour l'ionosphère magnétiquement calme des latitudes moyennes, sont décrits par des modèles qui donnent une précision relative de la prévision TEC allant jusqu'à 50 - 80 %. Les changements irréguliers (variations) sont associés à des irrégularités ionosphériques de diverses natures, dont le spectre est de type loi de puissance.
À la suite d'études récentes, il est devenu clair que les perturbations dans l'ionosphère pendant les orages magnétiques affectent la dégradation et les perturbations du signal. Systèmes GPS non seulement à l'équateur et dans la zone polaire, mais même aux latitudes moyennes. Cependant, la question des causes et des mécanismes spécifiques de cette influence reste largement ouverte.
La tâche principale des recherches futures est d'étudier les mécanismes physiques des variations multi-échelles du contenu électronique total dans l'ionosphère lors de perturbations géomagnétiques dans l'espace proche de la Terre, accompagnées d'une dégradation du signal et de défaillances des systèmes radio par satellite. Ces études devraient être de nature globale avec l'implication maximale d'un certain nombre de moyens expérimentaux indépendants pour surveiller l'ionosphère (ionosondes numériques, radars à diffusion incohérente, ionosondes chirp, etc.).
Précision GPS
Chaque jeu de données complet comprend un modèle ionosphérique qui est utilisé par le récepteur pour approximer le retard de phase d'un signal lorsqu'il se déplace dans l'ionosphère à n'importe quelle position du satellite et à tout moment. Méthodes de mesure de la distance au satellite Utilisation d'un code pseudo-aléatoire. La pseudo-orange est la distance entre l'antenne du récepteur et le satellite, mesurée à l'aide d'un code pseudo-aléatoire. Comme mentionné précédemment, ces distances sont nécessaires pour calculer les coordonnées. La procédure de détermination de pseudodistance peut être décrite comme suit.
Imaginons que les horloges du satellite et du récepteur soient parfaitement synchronisées. Lorsqu'un code PRN est transmis depuis un satellite, le récepteur reproduit une copie exacte du même code. Après un certain temps, le code transmis par le satellite sera reçu par le récepteur. En comparant le code transmis et sa copie exacte, le récepteur peut calculer le temps qu'il faut pour que le code atteigne le récepteur. En multipliant le temps de trajet par la vitesse de la lumière, on obtient la distance entre le satellite et le récepteur. Mesures de distance par code Malheureusement, l'hypothèse selon laquelle le récepteur et l'horloge satellite sont entièrement synchronisés n'est pas tout à fait correcte. Cette méthode de calcul de la portée nécessiterait une synchronisation très précise des horloges du satellite et du récepteur. Les satellites GPS étant équipés d'horloges atomiques très précises, il est très coûteux de fournir un récepteur avec une telle horloge, puisque leur prix peut atteindre 20 000 $.
Le problème de synchronisation d'horloge est résolu en considérant l'erreur d'horloge du récepteur comme une inconnue supplémentaire dans les équations de navigation.
La distance entre le satellite et le récepteur est la somme du nombre total de cycles complets plus le cycle fractionnaire entre le récepteur et le satellite multiplié par la longueur d'onde de la porteuse. La portée déterminée à l'aide de la phase de porteuse est beaucoup plus précise que la portée déterminée à l'aide du code.
Il y a cependant un problème. La porteuse est une onde sinusoïdale, ce qui signifie que tous les cycles se ressemblent. Par conséquent, le récepteur GPS ne peut pas distinguer un cycle d'un autre. En d'autres termes, le récepteur, dès sa mise en marche, ne peut pas déterminer le nombre total de cycles complets entre le satellite et le récepteur. Il ne peut déterminer que la partie fractionnaire du cycle (avec une précision d'au moins 2 mm), alors que le nombre total de cycles reste inconnu ou ambigu.
Heureusement, le récepteur peut suivre le changement de phase lorsqu'il est allumé. Cela signifie que l'incertitude initiale se résout avec le temps. La détermination du nombre total de cycles de porteuse (longueurs d'onde) entre l'antenne et le satellite est appelée résolution d'ambiguïté - la recherche d'une valeur entière pour le nombre de longueurs d'onde. Pour les mesures post-traitées, qui sont utilisées pour déterminer une position avec une précision centimétrique, cette valeur entière est déterminée lors du traitement sur l'ordinateur. Pour les mesures en temps réel, qui sont utilisées pour déterminer une position avec une précision centimétrique, cette valeur entière est déterminée lors d'un processus appelé initialisation.
Un signal de saut est un saut entier dans la phase de porteuse d'un signal de télémétrie. Les pertes de signal peuvent être causées par une obstruction entre le signal et le satellite. Les interférences radio, les perturbations ionosphériques et la dynamique élevée du récepteur peuvent tous contribuer aux pertes de signal. Un glissement de cycle peut également se produire en raison d'une défaillance du récepteur. Un cycle de saut peut durer n'importe quelle durée.
Vous devez connaître les coordonnées de votre station de base aussi précisément que possible, car la précision obtenue grâce à la correction différentielle dépend directement de la précision des coordonnées de la station de base. Il existe deux méthodes pour effectuer une correction différentielle, en temps réel et en post-traitement.
Je crois que le développement du SCN aide également le pays, qui possède le SCN lui-même, à bien se développer. L'exploration active de l'espace extra-atmosphérique à proximité de notre planète se poursuit. Les progrès dans le domaine de l'électronique radio sont vraiment utiles, non seulement à des fins militaires, mais aussi à des fins civiles. Grâce à CH par exemple, la recherche de touristes de montagne a été grandement facilitée, CH est l'« assistant » du conducteur sur les routes et pas seulement. Mais quoi qu'il en soit, bon il y a aussi un mauvais côté... il y a une pollution constante de l'espace proche de la Terre avec des satellites déjà utilisés et leurs débris. Nous devons répondre à nos besoins sans nuire à l'environnement, ce que nous réussissons rarement...... CENTRE DE RECHERCHE ET D'INFORMATION DE COORDINATION (2002). - la description technique officielle des paramètres et le signal GLONASS. Consulté le 14 décembre 2009.
INSTITUT DE RECHERCHE RUSSE DE L'INSTRUMENTATION SPATIALE (2008). - la description technique officielle des paramètres et le signal GLONASS. Consulté le 14 décembre 2009.
Université d'État de la construction de Rostov
Département de géodésie appliquée
Systèmes de navigation par satellite GPS et Glonass
Terminé : étudiant gr. PG-579 Veremchuk R.V
Vérifié par : V. A Yakovlev
Rostov-sur-le-Don
introduction
En décembre 1976, la résolution du Comité central du PCUS et du Conseil des ministres de l'URSS « Sur le déploiement du système de navigation spatiale unifiée GLONASS (SYSTÈME GLOBAL DE NAVIGATION PAR SATELLITE) » a été adoptée. Ce décret, en fait, n'a fait que légaliser le travail déjà commencé sur la création d'un nouveau système et a déterminé la procédure pour son développement et son test. Des propositions techniques pour le système GLONASS dans le cadre du vaisseau spatial 11F654 Uragan ont été développées au NPO de Krasnoyarsk de mécanique appliquée (NPO PM) au début de 1976 et examinées par une commission interministérielle en août de la même année. Le système GLONASS représente la deuxième génération de systèmes de navigation par satellite russes. La création de ce système de navigation a été prédéterminée par les besoins de nouveaux consommateurs potentiels qui avaient besoin d'un référencement de haute précision de leur position dans le temps et dans l'espace. Ces consommateurs étaient l'aviation, la marine, les véhicules terrestres, les engins spatiaux, ainsi que les systèmes de combat spéciaux (en particulier les ICBM mobiles à moyenne et longue portée). L'exploitation réussie des systèmes de navigation par satellite LEO par les consommateurs maritimes a attiré une grande attention sur la navigation par satellite. En 1976, le système de navigation et de communication Cyclone-B a été adopté par l'armée soviétique, composé de six vaisseaux spatiaux Parus en orbite sur des orbites quasi polaires à une altitude de 1000 km. Trois ans plus tard, le système de radionavigation par satellite (SRNS) de Tsikada était mis en service, composé de quatre engins spatiaux en orbite de la même classe que celle de l'engin spatial Parus. Et si le premier système était utilisé exclusivement dans l'intérêt du ministère de la Défense de l'URSS, le second était principalement destiné à la navigation des navires civils. Equiper les navires marchands d'équipements de navigation par satellite s'est avéré très rentable, car grâce à la précision accrue de la navigation, il a été possible d'économiser tellement de temps et de carburant que l'équipement de bord du consommateur s'est rentabilisé dès la première année d'exploitation. . Lors des tests de ceux-ci et du précédent système Cyclone, il a été constaté que l'erreur de positionnement d'un navire en mouvement en fonction des signaux de navigation de ces satellites est de 250 ... 300 m. du complexe de contrôle au sol (GCC). Afin d'améliorer la précision de la détermination et de la prédiction des paramètres des orbites des satellites de navigation, un schéma spécial de mesure des paramètres des orbites au moyen de NKU a été élaboré, des méthodes de prévision plus précises ont été développées. Pour identifier les caractéristiques locales du champ gravitationnel de la Terre, affectant les orbites sélectionnées des engins spatiaux de navigation (NSA), des satellites géodésiques spéciaux "Kosmos-842" et "Kosmos-911" ont été lancés sur les mêmes orbites. L'ensemble des mesures prises a permis de préciser les coordonnées des instruments de mesure et de calculer les paramètres du modèle d'adaptation du champ gravitationnel, conçu spécifiquement pour déterminer et prédire les paramètres du mouvement du NSV. En conséquence, la précision des propres éphémérides transmises dans le cadre du signal de navigation a été augmentée de presque un ordre de grandeur, de sorte que leur erreur dans l'intervalle de prévision quotidien ne dépassait pas 70 ... 80 m.En conséquence, le erreur dans la détermination de leur position par les navires a diminué à 80 ... 100 m ...
Cependant, les systèmes LEO ne pouvaient pas répondre aux exigences de toutes les classes potentielles de nouveaux consommateurs en raison des principes sous-jacents à leur construction. Ainsi, si pour les consommateurs fixes équipés d'un équipement de réception à deux canaux, l'erreur de détermination de l'emplacement était réduite à 32 m (données pour l'American Transit SRNS), alors lors du déplacement, les erreurs commencent immédiatement à augmenter en raison de l'imprécision du calcul du chemin - le SRNS en orbite basse n'a pas permis de déterminer la vitesse de déplacement. De plus, à partir des mesures obtenues, seules deux coordonnées spatiales peuvent être déterminées. Le deuxième inconvénient Systèmes LEO il y avait un manque de couverture mondiale, puisque, par exemple, à l'équateur, les satellites traversaient la zone de visibilité du consommateur en moyenne après 1h30, ce qui ne permet que des sessions de navigation discrètes. Enfin, du fait de l'utilisation d'un seul satellite dans une session, la durée des mesures peut atteindre 10 ... 16 min. La longue durée des séances et les intervalles considérables qui les séparent rendent inévitable le recours à des mesures spéciales pour l'estime. Dans le même temps, les erreurs d'estime limitent la précision du positionnement. Néanmoins, l'équipement de l'avion a été testé par rapport aux signaux des systèmes Transit et Tsikada. Dans le même temps, il a été confirmé que l'erreur de détermination de la position dépend faiblement des manœuvres de l'avion et est en réalité principalement déterminée par les erreurs de connaissance de la vitesse sol, sans dépasser 1,8 km.
Les RNS de deuxième génération ont été conçus à l'origine comme des systèmes ne présentant pas tous les inconvénients ci-dessus. La principale exigence de la conception était de fournir au consommateur à tout moment la possibilité de déterminer trois coordonnées spatiales, le vecteur vitesse et l'heure exacte, ce qui est obtenu en recevant simultanément des signaux d'au moins quatre satellites. En fin de compte, cela a conduit à la mise en œuvre d'une idée technique importante - la coordination de la position spatiale du satellite sur les orbites et la synchronisation des signaux émis par les satellites. La coordination du mouvement de tous les engins spatiaux confère au système des propriétés de réseau, qu'il perd en l'absence de correction de la position de l'engin spatial.
Initialement, des orbites semi-diurnes de moyenne à haute (20 000 km) ont été choisies comme orbites pour le nouveau système, ce qui a assuré le rapport optimal entre le nombre d'engins spatiaux dans le système et la taille de la zone de couverture radio. Cependant, la hauteur de l'orbite de travail a ensuite été réduite à 19100 km. Ceci a été fait en partant du fait que pour les engins spatiaux avec une période orbitale égale à une demi-journée, un effet résonant de l'influence de certaines harmoniques du géopotentiel se manifeste, conduisant à une "destruction" assez rapide d'une position relative donnée du NSA et la configuration du système dans son ensemble. Evidemment, dans ce cas, pour maintenir le système, il faudrait effectuer des corrections plus fréquentes de l'orbite de chaque engin spatial. Avec l'altitude d'orbite choisie pour une visibilité garantie par le consommateur d'au moins quatre satellites, leur nombre dans le système devrait être de 18, mais il a été porté à 24 afin d'améliorer la précision de la détermination des coordonnées et de la vitesse de l'utilisateur en lui donnant la possibilité de choisir parmi le nombre de satellites visibles des quatre, offrant la plus grande précision. Il convient de noter qu'à l'heure actuelle, cette exigence a perdu de sa pertinence, car l'équipement de navigation standard moderne du consommateur (NAP) a la capacité de recevoir des signaux de 8 à 12 NSA dans la zone de visibilité radio en même temps, ce qui le rend possible de ne pas se soucier de choisir les quatre optimales, mais simplement de traiter toutes les mesures reçues...
L'un des principaux problèmes de la création d'un SRNS qui fournit des déterminations de navigation non synchronisées simultanément pour plusieurs satellites est le problème de la synchronisation mutuelle des échelles de temps des satellites avec une précision du milliardième de seconde (nanosecondes, ns), puisque la désynchronisation des signaux de navigation émis par satellites de seulement 10 ns provoque une erreur supplémentaire dans la détermination de l'emplacement du consommateur jusqu'à 10 ... 15 m. Pour résoudre le problème de la synchronisation de haute précision des échelles de temps à bord, il était nécessaire d'installer des étalons de fréquence au césium très stables et un étalon d'hydrogène au sol sur les satellites (un ordre de grandeur plus stable), ainsi que de créer des moyens au sol pour comparer les échelles avec une erreur de 3 ... 5 ns.
En 1977-78. à NPO PM, une conception préliminaire du système a été réalisée, dont les matériaux ont été approuvés en septembre 1978 par une commission interministérielle présidée par le général de division IV Meshcheryakov. L'affectation tactique et technique (TTZ) du système GLONASS a été convenue avec les commandants en chef de toutes les branches des forces armées et des ministères : le ministère de la Machinerie générale, le ministère de l'Industrie radio, le ministère de l'Industrie aéronautique, le Ministère de l'industrie de la défense, le Ministère des transports maritimes, le Ministère des pêches, le Ministère de la justice, de l'industrie et le Ministère de l'aviation civile. En novembre 1978, TTZ a été approuvé par le ministre de la Défense de l'URSS.
Cependant, à ce moment-là, en raison de la trop longue période de coordination de la tâche, les délais initiaux pour le déploiement du système ont été perturbés. Par conséquent, le 29 août 1979, une nouvelle résolution du Comité central et du Conseil des ministres a été publiée sur GLONASS. Il a fixé les délais suivants pour l'exécution des travaux sur le système :
Début des essais en vol et création d'un système de 4-6 engins spatiaux "Uragan" pour tester les principes de base et caractéristiques techniques-1981 année;
Création d'un système de 10-12 SC "Uragan" (dans deux plans de travail orbitaux) et mise en service avec et avec des caractéristiques tactiques et techniques convenues entre le ministère de la Défense, le ministère des Affaires générales et le ministère de l'Industrie radio - 1984;
Modernisation du système jusqu'à 24 engins spatiaux - 1987.
Les principaux développeurs du système dans la résolution étaient :
NPO PM Minoschemash - pour le système dans son ensemble ;
PO "Radiopribor" (maintenant RNII KP) du ministère de la Chimie générale - sur le complexe de contrôle au sol, complexe radiotechnique embarqué, équipement grand public;
LNRTI (aujourd'hui RIRV) du ministère de l'Industrie radio - sur le complexe temps-navigation.
Cependant, ces procédures et termes ont dû être à nouveau clarifiés en juillet 1981. Dans la nouvelle résolution du Comité central et du CM, 1982 a été désignée comme date de début du déploiement du système.
Les essais en vol du système GLONASS ont commencé le 12 octobre 1982 avec le lancement du premier vaisseau spatial 11F654 Uragan N11l et de deux modèles d'ensemble et de poids 11F654GVM. Ensuite, lors des six lancements suivants, deux engins spatiaux standard et un ordinateur principal ont été lancés en orbite. Cela était dû à l'indisponibilité de l'équipement électronique des satellites. Ce n'est qu'à partir du huitième lancement dans le cadre du déploiement du système GLONASS (16 septembre 1986) que trois engins spatiaux standards ont été lancés en orbite à la fois. Deux fois (10 janvier et 31 mai 1989), avec deux vaisseaux spatiaux Uragan, des vaisseaux spatiaux géodésiques passifs du vaisseau spatial "Etalon" ont été lancés en orbite, qui ont été utilisés pour clarifier les paramètres du champ gravitationnel et son influence sur les orbites du vaisseau spatial Uragan .
Pour tester l'équipement de navigation, des ensembles de base de six de chaque désignation ont été fabriqués pour l'armée de l'air, la marine, les forces terrestres, la MGA, la MMF et les forces de missiles stratégiques. Au total, 22 ont été affectés à des essais en vol. vaisseau spatial(9-10 départs). Ce nombre d'engins spatiaux a été consommé le 16 septembre 1987. Cependant, à ce moment-là, le système n'avait pas été déployé, même pour une utilisation limitée (12 engins spatiaux dans deux avions). Ce n'est qu'après le lancement du 4 avril 1991 que GLONASS comprenait 12 engins spatiaux opérationnels en même temps.
Le 24 septembre 1993, le premier étage du système GLONASS a été mis en service. À partir de ce moment, les vaisseaux spatiaux ont été lancés dans le troisième plan orbital. Le 14 décembre 1995, après le 27ème lancement de Proton-K avec Hurricanes, le déploiement de la configuration standard du système GLONASS était achevé. Au total, d'octobre 1982 à décembre 1998, 74 vaisseaux spatiaux Uragan et huit de ses modèles de poids total (GVM) ont été lancés en orbite. Lors du déploiement du système, six Hurricanes se sont retrouvés sur des orbites hors conception en raison de défaillances de l'étage supérieur 11S861. En 1997, on estimait que près de 2,5 milliards de dollars avaient été dépensés pour le déploiement du système.
Principes de base du système GLONASS
Les satellites GLONASS émettent en continu deux types de signaux de navigation : un signal de navigation de précision standard (ST) dans la bande L1 (1,6 GHz) et un signal de navigation de haute précision (HT) dans les bandes L1 et L2 (1,2 GHz). Les informations fournies par le signal de navigation ST sont disponibles pour tous les utilisateurs de manière permanente et globale et permettent, lors de l'utilisation des récepteurs GLONASS, de déterminer :
· Coordonnées horizontales avec une précision de 50-70 m (99,7% de probabilité);
· Coordonnées verticales avec une précision de 70 m (99,7% de probabilité);
Composantes vectorielles de vitesse avec une précision de 15 cm/s (probabilité de 99,7 %)
· Temps précis avec une précision de 0,7 s (99,7% de probabilité).
Ces précisions peuvent être considérablement améliorées en utilisant une méthode de navigation différentielle et/ou des méthodes de mesure spéciales supplémentaires.
Le signal BT est principalement destiné aux consommateurs du ministère de la Défense RF et son utilisation non autorisée n'est pas recommandée. La question de la fourniture du signal BT aux consommateurs civils est à l'étude.
Pour déterminer les coordonnées spatiales et l'heure exacte, il est nécessaire de recevoir et de traiter les signaux de navigation d'au moins 4 satellites GLONASS. Lors de la réception des signaux radio de navigation GLONASS, le récepteur, à l'aide de méthodes d'ingénierie radio bien connues, mesure les distances par rapport aux satellites visibles et mesure leur vitesse.
Parallèlement aux mesures, le récepteur traite automatiquement les horodatages et les informations numériques contenus dans chaque signal radio de navigation. L'information numérique décrit la position d'un satellite donné dans l'espace et le temps (éphémérides) par rapport à l'échelle de temps commune au système et dans un système de coordonnées cartésiennes liées géocentriquement. De plus, les informations numériques décrivent la position d'autres satellites dans le système (almanach) sous la forme d'éléments képlériens de leurs orbites et contiennent d'autres paramètres. Les résultats de mesure et les informations numériques reçues sont les données initiales pour résoudre le problème de navigation afin de déterminer les coordonnées et les paramètres de mouvement. Le problème de navigation est résolu automatiquement dans l'ordinateur du récepteur en utilisant la méthode bien connue des moindres carrés. À la suite de la solution, trois coordonnées de l'emplacement du consommateur, la vitesse de son mouvement sont déterminées et l'échelle de temps du consommateur est liée à l'échelle de haute précision du temps universel coordonné (UTC).
Champ de radionavigation
Les signaux radio de navigation émis par un satellite standard forment un champ de radionavigation dans l'espace proche de la Terre.
Dans le GLONASS SRNS, chaque satellite standard émet des signaux radio de navigation 1600 MHz et 1250 MHz vers la Terre à l'aide d'antennes émettrices dont la partie utile du diagramme de rayonnement (BP) a une largeur de 2 = 38 et « éclaire » le disque terrestre avec un excès jusqu'à la hauteur h 0 au-dessus de la surface.
La partie active du diagramme d'antenne peut être représentée par un faisceau radio conique avec un angle de 2 0 au sommet. Il est évident que
sin 0 = (h 0 + r) / (H + r),
où r = 6400 km est le rayon de la Terre ; H = 19100 km altitude orbitale de la NSA.
En substituant 0 = 19, on obtient h 0 = 2000 km.
Avec les gaz d'échappement pleins (24 satellites standard), le champ de radionavigation aux altitudes h h 0 = 2000 km est continu dans l'espace, c'est-à-dire le consommateur en tout point de cet espace est « éclairé » par des faisceaux radio d'au moins quatre satellites, qui forment par rapport à lui une constellation satisfaisante en termes de facteur géométrique pour la détermination autonome opérationnelle des coordonnées et du vecteur vitesse.
Aux altitudes h h 0, le champ de radionavigation devient discret dans l'espace. Les objets spatiaux situés à des hauteurs h 0 h H sont « éclairés » par les faisceaux radio de la constellation nécessaire à la navigation opérationnelle (au moins quatre satellites, dont un satellite sous l'horizon local), pas partout, mais seulement lorsqu'ils se trouvent dans certaines zones de espacer.
Les objets spatiaux à des hauteurs h H (par exemple, sur une orbite géostationnaire) seront « éclairés » dans certaines parties de leur orbite par un faisceau radio d'un ou deux NSV (avec un OG complet), et le NAP peut ne pas déterminer rapidement l'orbite d'un objet spatial sur la base du traitement des résultats de la réception des signaux radio de navigation dans les parties "éclairées" de l'orbite.
Nous nous limitons à considérer un champ de radionavigation continu (h h 0). La principale caractéristique du champ de radionavigation pour l'usager au sol est la puissance du signal radio de navigation du satellite proche zénith et proche horizon en sortie de l'antenne de réception « standard » (hors réflexions depuis la surface de la Terre) :
P 0 = P G () G 0 () 2 / (4 R) 2,
où P p est la puissance de rayonnement de l'émetteur ; G () est le facteur de directivité de l'antenne émettrice (compte tenu des pertes dans l'AFD) dans la direction vers l'antenne réceptrice ; G 0 () le facteur de directivité de l'antenne de réception « standard » dans la direction vers l'antenne d'émission ; la longueur d'onde de l'oscillation de la porteuse du signal radio; R est la distance entre l'antenne de réception et l'antenne d'émission.
Dans le système GLONASS, les antennes d'émission pour les signaux radio de navigation sur le satellite ont une polarisation de rayonnement circulaire vers la droite.
Le facteur de directivité G () des antennes émettrices dans le secteur de travail des directions 19 par rapport à l'axe de l'antenne est
Comme antenne de réception « standard », il convient de considérer une antenne de réception isotrope à polarisation circulaire, G 0 () = 1.
La portée R de l'antenne de réception située à la surface de la Terre jusqu'au proche zénith ( = 90) NSA sera R = H = 19100 km, à l'horizon proche ( = 5) NSA sera R = 24000 km.
Bilan de puissance P 0 des signaux radio de navigation bande étroite en sortie d'une antenne de réception « standard » :
| 1600 MHz | 1250 MHz | |||
| , ang. grêle. | 90 | 5 | 90 | 5 |
| P p, dB W | | | ||
| Sol (), dB | +10 | +12 | +9 | +11 |
| ( R) 2, dB | 182 | 184 | 180 | 182 |
| G 0 (), dB | 0 | 0 | ||
| P 0, dB | 157 1 | 157 1 | 162 1 | 162 1 |
A noter que la puissance du signal radio de navigation reçu par un usager au sol utilisant une antenne isotrope est la même pour le satellite proche du zénith et proche de l'horizon.
Structure du signal GLONASS
un code de télémétrie grossier transmis à un débit de 511 Kbit/s (Fig. 6c) ;
des séquences de données de navigation transmises à un débit de 50 bit/s (Fig. 6a) ;
onde de méandre, transmise à une vitesse de 100 bit/s (Fig. 6b).
Le signal dans la plage L1 (similaire au code C / A du GPS) est disponible pour tous les consommateurs dans la plage de visibilité de l'engin spatial. Le signal L2 est destiné à un usage militaire et sa structure n'a pas été divulguée.
Pour les signaux radio de navigation, le CI est généré à bord du satellite sur la base des données transmises du système NKU à la carte du satellite au moyen d'un équipement radio. Le signal numérique transmis dans les signaux radio de navigation est structuré sous forme de lignes, de trames et de supertrames.
Dans un signal radio de navigation à bande étroite de 1600 MHz, la ligne DI a une durée de 2 s (avec le MB) et contient 85 symboles binaires d'une durée de 20 ms, transmis dans un code relatif. Le premier caractère de chaque ligne est l'initiale ("vierge") du code relatif. Les huit derniers caractères de chaque ligne sont des caractères de contrôle Hamming, vous permettant de corriger un seul caractère mal orthographié et de détecter deux caractères mal orthographiés dans la chaîne. La trame contient 15 lignes (30 s), supertrame 5 trames (2,5 min).
Dans le cadre de chaque trame, le volume complet du CI opérationnel et une partie de l'almanach du système sont transmis. L'almanach complet est transmis dans la supertrame.
Le signal numérique opérationnel dans le cadre fait référence au satellite, émettant un signal radio de navigation, et contient :
· Signes de la fiabilité de l'indicateur numérique dans le cadre ;
· Heure de début de la trame t k ;
· Informations sur les éphémérides coordonnées et dérivées des coordonnées NSV dans un système de coordonnées géocentriques rectangulaires à l'instant t 0 ;
· Des corrections temps-fréquence (FWC) à l'instant t 0 sous la forme d'une correction relative à la fréquence porteuse du signal radio de navigation et d'un amendement à la BSV de la NSA ;
· Temps t 0.
Les temps t 0, auxquels EI et PVP sont « liés », sont des multiples de 30 minutes à partir du début de la journée.
L'almanach du système contient :
· L'heure à laquelle appartient l'almanach ;
· Paramètres orbitaux, nombre d'une paire de fréquences porteuses et correction au BSV pour chaque satellite standard dans l'OG (24 satellites) ;
· Correction au BC du système par rapport au BC du pays, l'erreur de la correction n'est pas supérieure à 1 µs.
L'almanach du système est nécessaire dans le NAP pour planifier une session de navigation (choix de la constellation optimale du satellite) et pour recevoir les signaux radio de navigation dans le système (prévision du décalage Doppler de la fréquence porteuse). La DI opérationnelle est nécessaire dans le NAP en session de navigation, puisque les CWP sont entrés dans les résultats de mesure, et l'EI est utilisé pour déterminer les coordonnées et le vecteur vitesse du consommateur.
Dans le système NAVSTAR, le CI dans les signaux radio de navigation à bande étroite est structuré comme suit : une ligne a une durée de 6 s, une trame contient 5 lignes (30 s), une supertrame 25 trames (12,5 min).
Les signaux radio de navigation à bande étroite du système GLONASS offrent une réception (mise à jour) plus rapide de l'almanach en raison de la durée plus courte des supertrames (2,5 min) par rapport au système NAVSTAR (12,5 min)
Mesures de navigation en NAP multicanal
Considérons un NAP multicanal utilisant des signaux radio à bande étroite et destiné à la navigation globale d'objets mobiles au sol (terre, mer, air). Nous supposerons qu'une antenne de réception large-directionnelle est utilisée dans le NAP.
Dans chaque canal du NAP dans le mode de poursuite d'un signal radio de navigation à bande étroite, le DI est reçu et deux paramètres de navigation sont mesurés chaque seconde - la pseudo-portée et la pseudo-vitesse radiale.
La pseudo-distance de l'objet au satellite est mesurée dans le NAP en mesurant le décalage du PSP1 reçu par rapport au signal de référence dans le NAP. La pseudo-vitesse radiale de l'objet par rapport au satellite est mesurée en mesurant le décalage de la fréquence porteuse du signal radio de navigation reçu par rapport à la fréquence du signal de référence dans le satellite. Le signal de référence dans le NAP est formé à l'aide d'un oscillateur à cristal.
Les résultats des mesures des pseudo-distances S k (t) au moins pour quatre SSC sélectionnés (k = 1,2,3,4), en tenant compte de l'introduction des VVP contenus dans la trame DI, peuvent être exprimés comme suit :
S k (t) = R k (t) + c (t) + c k (t) + S k (t),
où R k (t) est la distance de l'objet au satellite ; s la vitesse de la lumière ; (t) décalage du LB NAP (signal de référence) par rapport au système LB ; k (t) erreur CWP ; S k (t) erreur de mesure dans NAP.
En double bande Navigation sieste Des mesures de pseudo-distances à deux fréquences porteuses в 1600 MHz et n 1250 MHz permettent d'exclure les erreurs de mesure ionosphériques comme suit. Notons S 0 (t) la pseudodistance mesurée sans erreurs ionosphériques. Puisque pour les gammes supérieure et inférieure
S dans (t) = S 0 (t) + A / ; S n (t) = S 0 (t) + A / ,
où А / 2 est l'erreur ionosphérique de mesure de pseudodistance, alors l'algorithme pour obtenir le résultat combiné S 0 (t), dans lequel les erreurs ionosphériques sont exclues, sera le suivant :
S 0 (t) = S dans (t) -S n (t); m = n / in = 7/9.
L'erreur d'une mesure de pseudo-distance à double plage peut être estimée comme suit :
S 0 = S dans - S n = 2,53 S dans - 1,53 S n.
En session de navigation, les résultats de mesures dans le NAP de pseudo-distances relatives à au moins quatre SSC sélectionnés pour la session, et l'EI reçu des SSC sélectionnés, permettent de déterminer trois coordonnées de l'objet et le décalage de la LW locale de l'objet (signal de référence) par rapport à la LW du système.
L'objectif de cette section est d'estimer l'erreur de mesure des pseudo-distances dans un NAP multicanal en utilisant des signaux radio de navigation à bande étroite. Les principales sources d'erreurs de mesure de pseudodistance dans un NAP multicanal sont : le bruit et les trajets multiples à l'entrée du récepteur, la troposphère, l'ionosphère (dans un NAP monobande).
Lors de l'évaluation des erreurs de pseudo-distance causées par le bruit et les trajets multiples à l'entrée du récepteur, nous supposerons que des discriminateurs de retard sont utilisés dans les canaux NAP des circuits de poursuite PRS1, dans lesquels la largeur de la section linéaire centrale de la caractéristique discriminante est égale à la durée du symbole PRS1.
L'erreur de bruit (S) des mesures de pseudodistance monobande peut être estimée comme suit :
où c est la vitesse de la lumière ; F 1 fréquence d'horloge PSP1 ; P c/g w potentiel énergétique d'un signal radio de navigation à bande étroite à l'entrée du récepteur ; k détérioration du potentiel énergétique dans le récepteur (k 1,5); T 0 intervalle de moyennage (accumulation) des mesures.
Les potentiels énergétiques des signaux radio de navigation à bande étroite à l'entrée du récepteur du NAP avec une antenne de réception directionnelle large (voir ci-dessus) sont de [dB Hz] :
| = 90 | = 5 | |
| 1600 MHz | +47...49 | +39...44 |
| 1250 MHz | +43...45 | +34...39 |
et, par conséquent, les erreurs de bruit des mesures à plage unique avec une moyenne T 0 = 1 s seront [m] :
| | | |
| (S dans) 1600 MHz | 1,7...2,1 | 3,3...6,0 |
| (Sn) 1250 MHz | 3,0...4,0 | 5,9...10,5 |
Nous trouvons l'erreur de bruit d'une mesure de pseudodistance à deux bandes comme suit :
(S 0) = (2 + 2) 1/2 ;
et, par conséquent, on obtient à T 0 = 1c
(S 0) = 
Un signal radio de navigation provenant d'un satellite proche de l'horizon peut arriver à un objet mobile au sol non seulement de manière directe, mais aussi en raison de la réflexion spéculaire de la surface de la terre (multitrajet). Le signal radio réfléchi arrive à l'objet depuis une direction située au-dessous de l'horizon local et, avec la réflexion spéculaire, change dans la direction opposée à la polarisation circulaire du signal radio. Compte tenu de cette circonstance et du fait de la sélectivité spatiale de l'antenne de réception, la puissance du signal radio réfléchi P c2 sera très inférieure à la puissance du signal radio direct P c1 à l'entrée du récepteur.
L'erreur de mesure de la pseudo-portée jusqu'au satellite proche de l'horizon, causée par les trajets multiples lors de l'utilisation d'un signal radio de navigation à bande étroite, sera maximale dans la pire des situations lorsque le retard t du signal radio réfléchi par rapport à la radio directe le signal à l'entrée du récepteur sera égal à t = 1 / 2F 1, où F 1 est la fréquence d'horloge de la PSP1 ... A t 1 / 2F 1, et à t 3 / 2F 1, l'erreur sera bien moindre que dans la pire des situations. À T 0 = 1 s, l'erreur de pseudo-distance par rapport au satellite à horizon proche due aux trajets multiples dans la pire des situations pour les signaux radio de navigation à bande étroite sera égale à
En substituant P c2 / P c1 = - (30 ... 32) dB, on obtient (S) = 3,0 m, ce qui est en bon accord avec les données expérimentales. Ainsi, avec des mesures bi-bande (1600 MHz, 1250 MHz) et T 0 = 1 s on obtient :
(S 0) = ![]() (S) = 9,0 m.
(S) = 9,0 m.
Dans la troposphère, la vitesse de propagation d'une onde radio est égale à c = c 0 / n (h), où c 0 est la vitesse de propagation de la lumière dans le vide ; n (h) est l'indice de réfraction de la troposphère à une hauteur h au-dessus de la surface de la Terre, n (h) .
L'erreur troposphérique de la mesure de distance sans interrogation (pseudo-distance) pour le satellite aux angles d'élévation du satellite peut être trouvée comme suit :
R () = 
Dans NAP, les erreurs troposphériques sont compensées par des corrections calculées. Si nous calculons les corrections troposphériques pour les paramètres moyens de la troposphère (globalement), alors leur erreur ( R) sera de 10 % de la valeur de la correction R ().
Un modèle de troposphère exponentiel simple peut être utilisé pour estimer les erreurs :
n (h) = n (0) e -h / a;
et, en substituant les valeurs moyennes n (0) = 3 10 -4, a = 8 km, on obtient :
Évaluons les erreurs ionosphériques de mesure de pseudodistance dans un NAP monobande (1600 MHz). L'ionosphère de la Terre commence à une altitude de 100 km, à des altitudes de 300 à 400, la concentration d'électrons dans l'ionosphère est maximale et plus élevée avec l'augmentation de l'altitude diminue de manière exponentielle et à une altitude de 900 km, la concentration d'électrons dans l'ionosphère est d'environ 10% du maximum.
La vitesse de groupe du signal radio dans l'ionosphère est c = c 0 n (h), où c 0 est la vitesse de la lumière dans le vide, n (h) est l'indice de réfraction de l'ionosphère à une altitude h au-dessus de la surface de la Terre , n (h)<1. Коэффициент преломления в ионосфере n(h) зависит от частоты радиосигнала и для частоты радиосигнала f >100 MHz, vous pouvez utiliser l'égalité :
n (h) = 1-n (h) = 40,3 N (h) / f 2,
où N (h) est la concentration électronique de l'ionosphère à la hauteur h [e/cm 3] ; f est la fréquence porteuse du signal radio [kHz].
Estimons les erreurs ionosphériques de la mesure non demandée de la distance (pseudo-distance) au satellite proche du zénith et de l'horizon proche.
L'erreur ionosphérique dans le passage vertical d'un faisceau radio vers un objet au sol à partir d'un satellite anti-aérien peut être estimée comme suit :
R 1 = 
Le profil vertical de la quantité n (h), en fonction de la hauteur, peut être représenté par :
1. pour h h 1 = 100 km n (h) = 0;
2. pour h 1 h h 2 = 300 km n (h) augmente linéairement jusqu'à n m, où n m la valeur maximale n (h);
3. pour h 2 h h 3 = 400 km n (h) = n m;
4.avec h h 3 = 400 km n (h) = n m e
En utilisant cette approximation pour n (h), nous obtenons une formule pour estimer l'erreur ionosphérique des mesures non demandées de la distance (pseudo-distance) au satellite anti-aérien
R 1 = b e n m;
b e = 0,5 (h 2 -h 1) + (h 3 -h 2) + a = 400 km.
Le paramètre b e peut être appelé l'épaisseur de l'ionosphère équivalente, pour laquelle n (h) = n m aux hauteurs h = 200 ... 600 km et en dehors de ces hauteurs n (h) = 0.
L'erreur ionosphérique R 2 de la pseudodistance horizontale du satellite ( ) peut être estimée approximativement comme suit :
R 2 = R 1 / cos; sin = r / (r + h 3),
où est l'angle entre le faisceau radio du satellite horizontal ( ) et la verticale locale à une altitude de h 3 = 400 km (le milieu de l'ionosphère équivalente); r est le rayon de la Terre. En effectuant des calculs, nous obtenons et, par conséquent, R 2 = 3,3 R 1. Pour un satellite proche de l'horizon ( = 5 ... 10), on peut supposer que R 2 = 3 R 1.
Trouvons la valeur n m pour la fréquence porteuse f = 1600 MHz du signal radio de navigation. Aux latitudes moyennes pendant la pire saison (jour d'hiver) pendant les années d'activité solaire maximale, la concentration maximale d'électrons à des altitudes de 300 ... 400 km peut atteindre N = 3,0 106 e / cm 3 et, par conséquent, pour f = 1,6 10 6 kHz on obtient
n m = 3,8 10 -5, R 1 = 15 m, R 2 = 45 m.
La nuit et en été, les erreurs ionosphériques seront plusieurs fois plus faibles. Dans les années d'activité solaire minimale, les erreurs ionosphériques, même un jour d'hiver, sont 5 ... 6 fois inférieures aux valeurs maximales ci-dessus.
Discutons de la perspective lorsque les satellites de la deuxième modification seront exploités dans le système GLONASS, qui émettra un signal radio de navigation à deux composantes de 1250 MHz au lieu d'un signal radio à une seule composante de 1250 MHz dans les premiers satellites de modification. En conséquence, il devient possible de mesurer les paramètres de navigation dans un NAP à double bande en utilisant des signaux radio à bande étroite de 1600 MHz et 1250 MHz pour éliminer les erreurs de mesure ionosphériques. Mais avec une mesure de pseudo-distance bibande, les erreurs de bruit et les erreurs dues aux trajets multiples augmenteront considérablement par rapport à un NAP monobande (1600 MHz). Sur des objets dynamiques avec un modèle de mouvement non déterministe (T 0 = 1 s), il est inapproprié d'utiliser des signaux radio de navigation bi-bande à bande étroite 1600 MHz et 1250 MHz pour déterminer les coordonnées de l'objet, car dans ce cas, Comme montré ci-dessus:
1.les erreurs de bruit de la pseudodistance par rapport au satellite proche de l'horizon seront (S 2) = 12 ... 22 m, c'est-à-dire dépassera les erreurs de mesure ionosphérique dans un NAP à bande unique dans la pire saison (jour d'hiver);
2. les erreurs de la pseudo-distance au satellite proche de l'horizon, causées par les trajets multiples, seront (S 2) = 9 m (dans la pire des situations), c'est-à-dire sera proportionnelle aux erreurs ionosphériques dans un NAP à bande unique pendant la pire saison (jour d'hiver).
Sur les objets au sol à faible dynamique, il est conseillé d'utiliser des signaux radio de navigation à bande étroite à deux bandes, car dans le NAP sur des objets à faible dynamique, il est possible de moyenner les résultats de mesure pendant une longue période (T 0 = 30 s) et réduire les erreurs de pseudo-distance de bruit et les erreurs dues aux trajets multiples au niveau requis.
Structure des signaux radio de navigation dans le système GLONASS
Dans le système GLONASS, chaque satellite standard de l'OG émet en permanence des signaux radio de navigation continus semblables à du bruit dans deux gammes de fréquences de 1600 MHz et 1250 MHz. Dans NAP, les mesures de navigation dans deux gammes de fréquences permettent d'exclure les erreurs de mesure ionosphériques.
Chaque satellite dispose d'un AFS au césium utilisé pour former la balance embarquée (BCS) et les signaux radio de navigation de 1600 MHz et 1250 MHz.
Les signaux de radio de navigation de type bruit dans l'OG NSA diffèrent en fréquences porteuses. Étant donné que les mêmes fréquences porteuses peuvent être utilisées pour des satellites mutuellement antipodes dans les plans orbitaux, pour 24 satellites standard, le nombre minimum requis de fréquences porteuses dans chaque gamme de fréquences est de 12. Cette affirmation est assez évidente si l'on tient compte des consommateurs au sol (terrestres , mer, air), car dans la zone de visibilité radio d'un consommateur au sol, des NSA mutuellement antipodes ne peuvent pas être localisées simultanément. Un consommateur d'espace peut simultanément « voir » des NSV mutuellement antipodes. Cependant, il existe deux circonstances favorables.
Le premier est que sur deux NSV mutuellement antipodes, au moins un sera en dessous de l'horizon local par rapport au consommateur d'espace. Il est pratiquement impossible d'utiliser une seule antenne large-directionnelle sur un objet spatial capable de recevoir des signaux radio de navigation de tous les engins spatiaux « visibles » au-dessus et au-dessous de l'horizon local. Ainsi, dans le NAP sur l'objet spatial, ils utilisent : soit une antenne large-directionnelle pour recevoir les signaux radio de navigation du satellite situé au-dessus de l'horizon local ; ou plusieurs antennes et plusieurs récepteurs pour recevoir les signaux radio de navigation du satellite situé au-dessus et au-dessous de l'horizon local.
Dans les deux versions, le NAP sur l'objet spatial effectuera une sélection spatiale efficace des signaux radio de navigation provenant d'engins spatiaux mutuellement antipodaux.
La seconde circonstance est que dans le NAP d'une session de navigation, la fréquence porteuse de chaque signal radio de navigation reçu est recherchée dans une bande étroite ( 1 kHz) autour de la valeur prédite, en tenant compte du décalage Doppler de la fréquence porteuse. Le décalage Doppler peut avoir des valeurs maximales de 5 kHz en NAP sur les objets au sol et 40 kHz en NAP sur les objets spatiaux en orbite basse. Par conséquent, une sélection Doppler efficace des signaux radio de navigation de la NSA radio-visible est effectuée dans le NAP sur l'objet spatial.
Ainsi, les signaux radio de navigation de satellites mutuellement antipodes avec les mêmes fréquences porteuses seront séparés de manière fiable dans le NAP sur l'objet spatial en raison de la sélection spatiale et Doppler.
Signal radio de navigation 1600 MHz bi-composant. A une fréquence porteuse donnée, deux signaux radio de navigation à déphasage de type bruit de même puissance « en quadrature » (déphasage mutuel de 90) sont formés dans l'émetteur radio : bande étroite et bande large.
Le signal radio de navigation à bande étroite 1600 MHz est formé en manipulant la phase de l'onde porteuse de 180 d'une séquence pseudo-aléatoire binaire périodique (PSP1) avec une fréquence d'horloge F 1 = 0,511 MHz et une période de répétition T 1 = 1 ms (511 cycles d'horloge). PSP1 est une séquence M - avec un polynôme caractéristique 1 + X 3 + X 5. En inversant la PSP1, les horodatages (MB) de l'échelle de temps embarquée (BCS) de la NSA et les symboles binaires des informations numériques (DI) sont transmis. L'horodatage a une durée de 0,3 s et est transmis à la fin de chaque intervalle de temps de deux secondes (à la fin des secondes paires). L'horodatage contient 30 symboles binaires d'une durée de 10 ms et est une séquence M de 31 symboles raccourcie d'un symbole.
Dans chaque ligne de deux secondes, à un intervalle de temps de 1,7 s, 85 symboles numériques binaires d'une durée de 20 ms et multipliés par un signal carré d'une durée de 10 ms sont transmis. Les limites du méandre, les symboles MV et DI sont cohérents. Dans le récepteur, en utilisant le méandre, la synchronisation symbolique pour le MB est effectuée et avec son aide la synchronisation des lignes et des caractères du DSC.
Le signal radio de navigation à large bande de 1600 MHz est formé en manipulant la phase de l'oscillation de la porteuse de 180 avec une séquence binaire périodique de PSP2 avec une fréquence d'horloge de F 2 = 5,11 MHz. En inversant le PRS2, des symboles binaires DRO d'une durée de 20 ms sont transmis.
Le signal radio de navigation de 1250 MHz émis par le satellite de la première modification est un signal radio de type bruit à large bande à une composante formé en manipulant la phase de l'oscillation de la porteuse par PSP2 binaire périodique 180 (F 2 = 5,11 MHz) sans inversion, c'est à dire sans transmettre DI. Le signal radio de navigation à 1250 MHz émis par la NSA de la deuxième modification contiendra deux signaux radio de type bruit 1250 MHz de même puissance en quadrature :
1.Signal radio de navigation à bande étroite 1250 MHz avec PSP1 (F 1 = 0,511 MHz, T 1 = 1 ms);
2. Signal radio de navigation large bande 1250 MHz avec PSP2 (F 2 = 5,11 MHz) sans DI.
Étant donné que la fréquence d'inversion de la PSP est bien inférieure à sa fréquence d'horloge, la largeur du «lobe» principal de l'enveloppe spectrale de puissance du signal radio de navigation à déphasage de type bruit est égale à deux fois la fréquence d'horloge de la PSP. . Par conséquent, la largeur du "lobe" principal de l'enveloppe du spectre de puissance d'un signal radio de navigation à bande étroite est de 1,022 MHz, et d'un large bande de 10,22 MHz.
Lors de la conception du GLONASS SRNS, la « grille » suivante de fréquences porteuses nominales pour les signaux radio de navigation dans deux gammes de fréquences a été développée : 1 600 MHz supérieur (V) et 1 250 MHz inférieur (H) :
вk = в0 + k в; b0 = 1602.00000 MHz ;
in = 0,5625 MHz ;
нk = н0 + k н; h0 = 1246,0000 MHz ;
n = 0,4375 MHz;
вk / нk = 9/7;
où k est le numéro de série conditionnel de la paire de fréquences porteuses bk et nk pour les signaux radio de navigation de 1600 MHz et 1250 MHz.
Les émetteurs radio de signaux radio de navigation dans le satellite de la première modification émettent des signaux radio de navigation à des fréquences porteuses commutables avec les nombres k = 1, ..., 24.
Voici les valeurs des fréquences porteuses extrêmes des signaux radio de navigation :
b1 = 1602,5625 MHz ; b24 = 1615,5000 MHz ;
h1 = 1246.4375 MHz; n24 = 1256,5000 MHz ;
Les spectres de fonctionnement des signaux radio de navigation aux fréquences porteuses avec les nombres k = 1, ..., 24 occupent les bandes de fréquences :
a) signaux radio de navigation à bande étroite 1602,0 ... 1616,0 MHz ;
b) signaux radio de navigation à large bande 1597,4 ... 1660,6 MHz, 1241,3 ... 1261,6 MHz.
Dans la gamme de fréquences 1600 MHz et 1250 MHz, conformément au Règlement des radiocommunications, des bandes de fréquences sont attribuées :
a) pour les communications radio par satellite (Espace Terre) 1559,0 ... 1610,0 MHz ; 1215,0 ... 1260,0 MHz ;
b) pour la radionavigation aéronautique 1559,0 ... 1626,5 MHz.
Le VAKR-87 a attribué la bande de fréquences 1660,6 ... 1613,8 MHz pour la radioastronomie à titre primaire. Afin de réduire et d'éliminer encore complètement les interférences radio avec les radiotélescopes dans la gamme de fréquences 1610.6 ... 1613.8 MHz des signaux radio de navigation du système GLONASS, l'Administration du système GLONASS a adopté en 1993. la décision selon laquelle les nombres suivants (k) de fréquences porteuses seront utilisés pour 24 satellites réguliers dans le système GLONASS :
1. avant 1998 k = 1, ..., 15 ; k = 21, ..., 24 ;
2.de 1998 à 2005, k = 1, ..., 12 ;
3.c 2005 k = -7, ..., 4.
Dans un premier temps (avant 1998), il n'y a pratiquement pas de spectres de signaux radio de navigation à bande étroite de 1600 MHz dans la bande de radioastronomie, et d'ici 2005, les spectres de signaux de radio de navigation à large bande seront également supprimés de la bande de radioastronomie. La troisième étape sera mise en œuvre grâce à l'utilisation du satellite de la deuxième modification, dans lequel les émetteurs de signaux radio de navigation peuvent émettre des signaux radio de navigation sur n'importe quelle paire de fréquences porteuses commutables avec des nombres k = -7.0, ... + 12.
Le système NAVSTAR utilise des signaux radio de navigation de type bruit continu à deux fréquences porteuses (supérieure et inférieure)
in = 1575,42 MHz ; n = 1227,6 MHz,
et la division de code des signaux radio de navigation est utilisée pour 24 satellites standard.
Le signal radio de navigation à la fréquence porteuse supérieure à est à deux composantes, il contient deux signaux radio de navigation de type bruit à déphasage en quadrature (déphasage de 90) : bande étroite et bande large.
Le signal radio de navigation à bande étroite in est formé en manipulant la phase de l'onde porteuse de 180 du PSP1 périodique avec une fréquence d'horloge F 1 = 1,023 MHz et avec une période de répétition T 1 = 1 ms. Des symboles DI binaires d'une durée de 20 ms sont transmis par inversion de PRS1.
Le signal radio de navigation à large bande in est formé en manipulant la phase de l'oscillation de la porteuse de 180 de la PSP2 périodique avec une fréquence d'horloge de F2 = 10,23 MHz. Les symboles DID binaires d'une longueur de symbole de 20 ms sont transmis en inversant PRS2.
Le signal radio de navigation n est monocomposant, large bande, formé en manipulant la phase de l'onde porteuse de 180 de la PSP2 périodique sans inverser.
Les signaux radio de navigation à large bande des systèmes NAVSTAR et GLONASS sont destinés à être utilisés par des consommateurs autorisés et sont protégés contre une utilisation non autorisée.
Les signaux radio de navigation à bande étroite des systèmes NAVSTAR et GLONASS sont ouverts et destinés aux consommateurs civils. Mais dans le système NAVSTAR, ces signaux sont artificiellement déformés en utilisant la procédure d'accès sélectif, ce qui dégrade la précision de la navigation pour les consommateurs sans licence.
Précision de la navigation globale des objets mobiles au sol
Évaluons la précision de la détermination des coordonnées d'un objet mobile au sol pendant la navigation opérationnelle mondiale à l'aide d'un NAP multicanal utilisant des signaux radio de navigation à bande étroite avec une fréquence de 1600 MHz dans le système GLONASS avec un OG complet de satellite standard.
L'erreur dans la détermination des coordonnées d'un objet en mouvement dépend des facteurs géométriques utilisés dans la session de navigation de la constellation du satellite radio-visible et est causée par les erreurs des EI et VVP dans les trames CI reçues du satellite, et les erreurs de mesure dans le NAP de la pseudodistance au satellite.
Lors de l'évaluation de la précision des coordonnées d'un objet en mouvement, les erreurs de l'EI et du CWP peuvent être recalculées en erreurs équivalentes des pseudo-distances au satellite.
Les erreurs sur les coordonnées du satellite, recalculées en erreurs équivalentes de la pseudo-distance, sont les projections des erreurs sur les coordonnées du satellite sur la direction du satellite à l'objet. Désignons : les erreurs des coordonnées NSV dans les plans vertical et horizontal. A partir de constructions géométriques simples, les formules suivantes peuvent être obtenues pour recalculer les erreurs sur les coordonnées du satellite en erreurs équivalentes des pseudo-distances (distances) de l'objet au satellite :
1.pour la NSA proche du zénith
S 1 = H 1 pour ;
S 1 = H 1 + 0,15 M 1 pour 45 ;
2.pour un satellite proche de l'horizon
S 2 = H 2 + 0,25 M 2 pour 2 0.
Les erreurs EI de prévision pour un jour pour un satellite de la première modification (voir ci-dessus) sont en moyenne (H) = 4 m, (L) = 15 m, et, par conséquent, les erreurs de pseudodistance équivalentes seront :
(S 1) = 4,0 ... 4,6 m et (S 2) = 5,5 m.
L'erreur du PVP dans la prévision à 12 heures pour le satellite de la première modification est B = 14 ns et, par conséquent, l'erreur équivalente de la pseudo-distance est S) = 4,2 m.
Lors de l'utilisation de signaux radio de navigation à bande étroite, les erreurs de mesure de pseudodistance pour le satellite proche du zénith S 1) et proche de l'horizon S 2) sont indiquées ci-dessus.
Composons le bilan total des erreurs de pseudodistance sans l'ionosphère (que nous appellerons erreur de pseudodistance instrumentale) pour un NAP multicanal utilisant des signaux radio de navigation à bande étroite monobande (1600 MHz) (T 0 = 1 s) :
Dans un NAP à six canaux sur un objet mobile au sol, les erreurs instrumentales maximales (0,95) pour déterminer l'emplacement d'un objet dans les plans horizontal p et vertical z sont associées à des erreurs instrumentales de pseudo-portée à « élevée » ( satellite proche du zénith) (S 1) et à « faible » (proche de l'horizontal ) NCA (S 2) comme suit (voir ci-dessus) :
dans les meilleures situations p = 2,0 (S 2); z = 2,0 (a);
dans les pires situations p = 2,2 (S 2); z = 2,2 (a),
(a) = 1/2.
En utilisant ces formules et les valeurs des erreurs instrumentales des pseudo-distances obtenues ci-dessus, nous trouverons des estimations des erreurs instrumentales maximales pour déterminer l'emplacement des objets dynamiques au sol (T 0 = 1 s) lors de l'utilisation de la navigation à bande étroite signaux radio dans un NAP monobande à six canaux (1600 MHz) :
1.dans les meilleures situations (S 1) = 6,2 m ; (S 1) = 7,7 m et, par conséquent, p = 15,4 m ; z = 34 m;
2. dans les pires situations (S 1) = 6,6 m ; (S 1) = 9,6 m et, par conséquent, p = 21 m; z = 42 m.
Une évaluation rigoureuse de la contribution des erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol lors de l'utilisation d'un NAP monobande est une tâche assez difficile, nous donnerons une analyse approximative.
Dans la section précédente, les erreurs ionosphériques des mesures de pseudodistance dans un NAP à bande unique ont été estimées. Il a été montré que l'erreur ionosphérique de la pseudodistance (distance) au satellite proche de l'horizon ( = 5 10) est égale à R 2 = 3 R 1, où R 1 l'erreur ionosphérique de la portée avec un faisceau radio vertical. Les erreurs ionosphériques de pseudodistance dans une séance dépendent de l'heure de la séance : minimum la nuit, maximum le jour.
Soit l'objet au sol situé sous l'intersection de deux anneaux orbitaux, et six satellites sont utilisés dans une session de navigation : deux près du zénith et quatre près de l'horizon. Évidemment, si la session de navigation est effectuée à midi, alors les erreurs ionosphériques des pseudo-distances pour le satellite à horizon proche différeront peu les unes des autres et, par conséquent, les quatre différences entre la pseudo-distance à l'horizon proche et au zénith le satellite sera approximativement le même D = R 2 - R 1 = 2 R 1. Dans cette situation, les erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol dans une session de navigation à midi peuvent être estimées comme
z = 2 D = 4 R 1; x, y = 0,5 D = R 1.
Si une session de navigation est effectuée le matin ou le soir, alors les erreurs ionosphériques des pseudo-distances par rapport au satellite proche de l'horizon seront très différentes, et pour de telles sessions de navigation, les erreurs ionosphériques dans la détermination des coordonnées peuvent être estimées approximativement comme suit : x, y, z = 2 R 1, où R 1 erreur ionosphérique de pseudo-distance par rapport au satellite zénith pendant la journée.
Si l'objet au sol est équidistant des trois anneaux orbitaux, alors il n'y a pas de satellite proche du zénith dans la session de navigation, et la NSA "haute" a des angles d'élévation 1 = 41 ... 45. Les erreurs ionosphériques dans la détermination des coordonnées d'un objet au sol dans une telle session de navigation ne seront pas plus importantes que dans une session dans laquelle il y a un satellite proche du zénith.
Ainsi, dans les sessions de navigation d'objets au sol lors de l'utilisation d'un NAP monobande à six canaux, les erreurs ionosphériques maximales dans la détermination des coordonnées d'un objet peuvent être estimées comme suit :
x, y = (1 ... 2) R 1; z = (2 ... 4) R 1,
où R 1 erreur ionosphérique avec faisceau radio vertical pendant la journée.
Dans la pire saison (jour d'hiver) dans les années d'activité solaire maximale R 1 = 15 m. Par conséquent, les erreurs ionosphériques maximales pour déterminer l'emplacement d'un objet au sol seront
p = [( x) 2 + ( y) 2] 1/2 = 21 ... 42 m; z = 30 ... 60 m.
Présentons les estimations obtenues des erreurs totales maximales (instrumentales et ionosphériques) de la navigation globale dans le SRNS du GLONASS lors de l'utilisation de signaux radio de navigation à bande étroite de 1600 MHz dans un NAP à six canaux sur des objets au sol dynamiques (T 0 = 1s) pendant les années d'activité solaire maximale :
Dans les années d'activité solaire minimale, les erreurs ionosphériques seront 5 ... 6 fois inférieures et, par conséquent, les erreurs totales maximales de navigation globale des objets mobiles au sol seront:
Satellite GLONASS
Le satellite GLONASS se compose structurellement d'un conteneur pressurisé cylindrique avec une unité d'instruments, un cadre de dispositifs d'alimentation d'antenne, des dispositifs de système d'orientation, des panneaux panneaux solaires avec entraînements, le groupe propulseur et les volets du système de contrôle thermique avec entraînements. Le satellite dispose également de réflecteurs optiques d'angle conçus pour calibrer les signaux radio du système de mesure en mesurant la distance au satellite dans la plage optique, ainsi que pour affiner les paramètres géodynamiques du modèle de mouvement du satellite. Structurellement, les réflecteurs d'angle sont formés sous la forme d'un bloc qui suit constamment la direction vers le centre de la Terre. La surface des réflecteurs d'angle est de 0,25 m2.
L'équipement embarqué comprend :
· Complexe de navigation;
· Complexe de gestion ;
· Système d'orientation et de stabilisation;
· Système de correction ;
· Système de thermorégulation ;
· Système d'alimentation.
Le complexe de navigation assure le fonctionnement du satellite en tant qu'élément du système GLONASS. Le complexe comprend : un synchroniseur, un générateur de signaux radio de navigation, un ordinateur de bord, un récepteur d'informations de navigation et un émetteur de signaux radio de navigation.
Le synchroniseur fournit la sortie de fréquences synchro très stables à l'équipement embarqué, la formation, le stockage, la correction et la sortie de l'échelle de temps embarquée.
Le générateur de signaux radio de navigation fournit la formation de signaux radio de navigation à déphasage pseudo-aléatoire contenant un code télémètre et un message de navigation.
Le complexe de contrôle assure le contrôle des systèmes satellitaires et contrôle l'exactitude de leur fonctionnement. Le complexe comprend : un système de commande et de mesure, une unité de contrôle des équipements embarqués et un système de contrôle de télémétrie.
Le système de commande et de mesure fournit la mesure de la distance en mode interrogation, le contrôle de l'échelle de temps embarqué, le contrôle du système par des commandes uniques et des programmes horaires, l'enregistrement des informations de navigation dans le complexe de navigation embarqué et la transmission de la télémétrie.
L'unité de contrôle fournit la distribution d'énergie aux systèmes et dispositifs satellites, le traitement logique, la reproduction et l'amplification des commandes uniques.
Le système de contrôle d'attitude et de stabilisation assure que le satellite est apaisé après la séparation du lanceur, l'orientation initiale des cellules solaires vers le Soleil et l'axe longitudinal du satellite vers la Terre, puis l'orientation de l'axe longitudinal du satellite vers le centre de la Terre et le pointage des cellules solaires vers le Soleil, ainsi que la stabilisation du satellite lors de la correction d'orbite. ... Le système utilise un dispositif basé sur la construction infrarouge de la verticale locale (pour l'orientation vers le centre de la Terre) et un dispositif pour l'orientation vers le Soleil. L'erreur d'orientation par rapport au centre de la Terre n'est pas pire que 3 degrés et l'écart de la normale à la surface de la batterie solaire par rapport à la direction du Soleil ne dépasse pas 5 degrés. Pour minimiser les perturbations du mouvement du centre de masse du satellite, les moteurs volants sont déchargés à l'aide d'un circuit magnétique. Le système propulsif est utilisé comme organe exécutif dans la mise en œuvre de la stabilisation et de la stabilisation du satellite lors de l'émission de l'impulsion de correction.
Le mode d'amortissement, qui permet d'amortir les vitesses angulaires, est activé dans la zone de visibilité radio.
Dans le mode d'orientation initiale vers le Soleil, le satellite tourne autour de l'axe longitudinal à l'aide des moteurs à volant de commande jusqu'à ce que le Soleil apparaisse dans le champ de vision du dispositif d'orientation solaire, qui est installé sur le panneau solaire.
Le mode d'orientation de la Terre commence à partir de la position d'orientation par rapport au Soleil en faisant tourner le satellite à l'aide de moteurs à volant le long de l'axe orienté vers le Soleil jusqu'à ce que la Terre apparaisse dans le champ de vision du dispositif d'orientation vers le centre de la Terre. En mode normal, l'orientation de l'axe du satellite ainsi que des antennes vers le centre de la Terre est assurée à l'aide des moteurs volants de commande en fonction des signaux des dispositifs d'orientation vers le centre de la Terre, l'orientation des batteries solaires vers le Soleil en faisant tourner le satellite avec les batteries solaires à l'aide du moteur à volant de commande le long d'un canal et fait tourner les panneaux de batterie par rapport au corps du satellite au moyen d'un entraînement de rotation du panneau solaire à travers un canal différent basé sur les signaux des instruments d'orientation solaire.
En mode orientation, avant la correction et la stabilisation du satellite lors de l'émission de l'impulsion de correction, l'orientation vers le Soleil n'est pas suivie.
Le système de correction garantit que le satellite est amené à une position donnée dans le plan orbital et est maintenu dans les limites données par l'argument de latitude. Le système comprend un système de propulsion et une unité de commande pour celui-ci. Le système de propulsion se compose de 24 moteurs de contrôle d'attitude d'une poussée de 10 g et de deux moteurs de correction d'une poussée de 500 g.
Le système de contrôle thermique fournit les conditions thermiques requises pour le satellite. La régulation de la chaleur évacuée du conteneur sous pression est réalisée par des persiennes, qui ouvrent ou ferment la surface de rayonnement en fonction de la température du gaz. La chaleur est évacuée des appareils par circulation de gaz à l'aide d'un ventilateur.
Le système d'alimentation comprend des panneaux solaires, des batteries de stockage, une unité d'automatisation et de stabilisation de tension. La puissance initiale des panneaux solaires est de 1600 W, la superficie est de 17,5 m2.
Lorsque le satellite passe dans les zones d'ombre de la Terre et de la Lune, les systèmes embarqués sont alimentés par des batteries rechargeables. Leur capacité de décharge est de 70 ampères-heures.
Pour assurer sa fiabilité, le satellite est équipé de deux ou trois ensembles de systèmes embarqués principaux.
Ainsi, le satellite GLONASS se voit confier les fonctions suivantes :
· Emission de signaux de radionavigation très stables ;
· Réception, stockage et transmission d'informations numériques de navigation ;
· Formation, numérisation et transmission de signaux horaires précis;
· Retransmission ou émission de signaux de mesure de trajectoire pour contrôler l'orbite et déterminer des corrections à l'échelle de temps embarquée ;
· Réception et traitement des commandes ponctuelles ;
· Réception, mémorisation et exécution de programmes temporaires de contrôle des modes de fonctionnement du satellite en orbite ;
· Formation d'informations télémétriques sur l'état des équipements embarqués et leur transmission pour traitement et analyse au complexe de contrôle au sol ;
· Réception et exécution de codes/commandes de correction et de phasage de l'échelle de temps embarquée ;
· Formation et transmission d'un "symptôme de dysfonctionnement" lorsque les paramètres vitaux contrôlés dépassent les limites normales.
Les satellites GLONASS sont contrôlés en mode automatisé.
La mise en orbite des satellites GLONASS est effectuée par un transporteur de classe lourde PROTON avec un étage supérieur depuis le cosmodrome de Baïkonour. Le transporteur affiche simultanément trois satellites GLONASS.
Le schéma de hachures comprend :
· Insertion de l'engin spatial sur une orbite circulaire intermédiaire avec une altitude de ~ 200 km;
· Transfert sur une orbite elliptique avec un périgée de ~ 200 km, un apogée de ~ 19100 km et une inclinaison de 64,3 degrés.
La translation de chaque satellite vers un point donné du plan orbital s'effectue à l'aide d'un système de propulsion satellitaire.
Précision d'amener au point de travail de l'orbite :
· Par la période de circulation - 0,5 s;
· Selon l'argument de latitude - 1 degré ;
· Par excentricité - ~ 0,01 ;
· Par l'inclinaison de l'orbite - ~ 0,3 degrés.
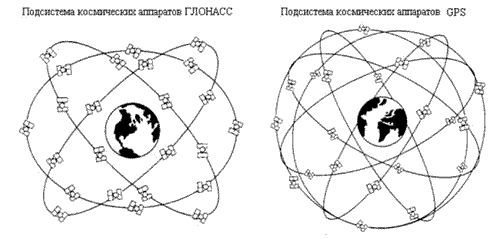
Segment spatial des systèmes GLONASS et GPS
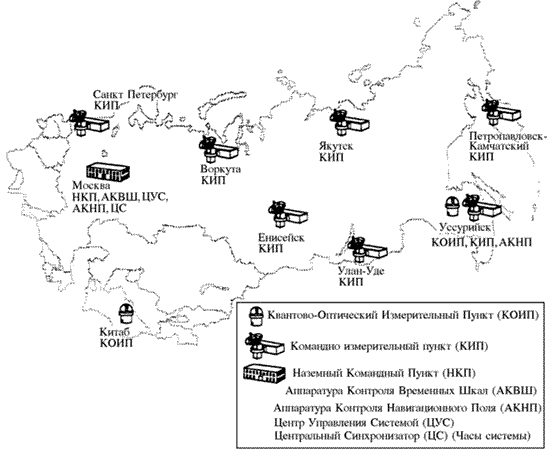
Structure des signaux radio de navigation GPS
Le GPS utilise le multiplexage par répartition en code (CDMA), de sorte que tous les satellites transmettent des signaux à la même fréquence. Chaque satellite GPS émet deux signaux déphasés. La fréquence du premier signal est L1 = 1575,42 MHz et la seconde - L2 = 1227,6 MHz. Le signal porteur L1 est modulé par deux séquences binaires dont chacune est formée en sommant le code de télémétrie modulo 2 et les données système et navigation transmises générées à un débit de 50 bit/s. A la fréquence L1, deux composantes en quadrature sont transmises, des séquences binaires à clé biphasique. La première séquence est la somme modulo 2 du code de télémétrie précis P ou du code Y classé et des données de navigation. La deuxième séquence est également la somme modulo 2 du code grossier C/A (ouvert) et de la même séquence de données de navigation.
Le signal radio à la fréquence L2 n'est calé biphasiquement que par l'une des deux séquences précédemment considérées. Le choix de la séquence modulante est effectué par commande depuis le sol.
Chaque satellite utilise ses propres codes télémétriques C/A et P (Y), ce qui permet la séparation des signaux satellites. Dans le processus de formation d'un code de télémétrie P (Y) précis, des horodatages du signal satellite sont formés simultanément.
Composition et structure des messages de navigation des satellites du système GPS
La division structurelle des informations de navigation des satellites GPS est effectuée en supertrames, trames, sous-trames et mots. Une supertrame est formée de 25 images et prend 750 secondes (12,5 minutes). Une trame est transmise en 30 secondes et a une taille de 1500 bits. La trame est divisée en 5 sous-trames de 300 bits chacune et est transmise sur un intervalle de 6 s. Le début de chaque sous-trame désigne un horodatage correspondant au début/à la fin de l'intervalle de temps du système GPS suivant de 6 s. Une sous-trame se compose de 10 mots de 30 bits. Dans chaque mot, les 6 bits de poids faible sont des bits de contrôle.
Dans les 1ère, 2ème et 3ème sous-trames, des données sur les paramètres de correction d'horloge et des données sur les éphémérides de l'engin spatial avec lequel la communication est établie sont transmises. Le contenu et la structure de ces sous-trames restent inchangés sur toutes les pages de la super-trame. Les 4e et 5e sous-trames contiennent des informations sur la configuration et l'état de tous les engins spatiaux du système, les almanachs des engins spatiaux, les messages spéciaux, les paramètres décrivant la relation entre l'heure GPS et l'UTC, etc.
Algorithmes de réception et de mesure des paramètres des signaux de radionavigation par satellite
Le segment des consommateurs de systèmes GPS et GLONASS comprend les récepteurs de signaux satellites. Le problème de navigation est résolu en mesurant les paramètres de ces signaux. Le récepteur peut être divisé en trois parties fonctionnelles :
 partie radiofréquence;
partie radiofréquence;
numérique ~ corrélateur;
CPU.
À partir de la sortie du dispositif d'alimentation d'antenne (antenne), le signal entre dans la partie radiofréquence.La tâche principale de cette partie est d'amplifier le signal d'entrée, le filtrage, la conversion de fréquence et la conversion analogique-numérique. De plus, la fréquence d'horloge de la partie numérique du récepteur provient de la partie radiofréquence du récepteur. A partir de la sortie de la partie radiofréquence, des échantillons numériques du signal d'entrée sont envoyés à l'entrée du corrélateur numérique.
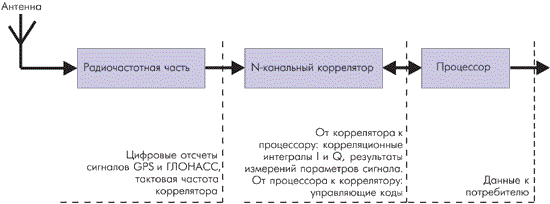
Structure de récepteur généralisée
Dans le corrélateur, le spectre du signal est transféré à la fréquence « zéro ». Ceci est réalisé en multipliant le signal d'entrée du corrélateur par l'oscillation harmonique de référence dans les canaux en phase et en quadrature. En outre, le résultat de la multiplication subit un traitement de corrélation en multipliant avec le code de télémétrie de référence et en s'accumulant sur la période du code de télémétrie. En conséquence, nous obtenons les intégrales de corrélation I et Q. Les lectures des intégrales de corrélation sont envoyées au processeur pour un traitement ultérieur et la fermeture des boucles PLL (boucle à verrouillage de phase) et CVD (circuit de suivi de retard). Les mesures des paramètres du signal dans le récepteur ne sont pas effectuées directement par le signal d'entrée, mais par sa copie exacte formée par les systèmes PLL et CVD. Les intégrales de corrélation I et Q permettent d'estimer le degré de « similitude » (corrélation) des signaux de référence et d'entrée. La tâche du corrélateur, en plus de former les intégrales I et Q, est de former un signal de référence en fonction des actions de contrôle (codes de contrôle) provenant du processeur. De plus, dans certains récepteurs, le corrélateur génère les mesures nécessaires des signaux de référence et les transfère au processeur pour un traitement ultérieur. En même temps, étant donné que les signaux de référence dans le corrélateur sont formés selon les codes de contrôle provenant du processeur, les mesures nécessaires des signaux de référence peuvent être effectuées directement dans le processeur, en traitant les codes de contrôle en conséquence, ce qui est fait dans de nombreux récepteurs modernes.
Quels paramètres de signal sont mesurés par le corrélateur (processeur) ?
La plage pour les mesures d'ingénierie radio est caractérisée par le temps de propagation du signal de l'objet de mesure au point de mesure. Dans les systèmes de navigation GPS/GLONASS, l'émission des signaux est synchronisée avec l'échelle de temps du système, plus précisément avec l'échelle de temps du satellite émettant ce signal. Dans le même temps, le consommateur dispose d'informations sur l'écart entre l'échelle de temps du satellite et celle du système. Les informations numériques transmises depuis le satellite permettent d'établir l'instant d'émission d'un certain fragment du signal (horodatage) par le satellite en temps système. Le moment de la réception de ce fragment est déterminé par l'échelle de temps du récepteur. L'échelle de temps du récepteur (consommateur) est formée à l'aide d'étalons de fréquence à quartz, il y a donc une « dérive » constante de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. La différence entre l'instant de réception d'un fragment du signal, mesuré à l'échelle de temps du récepteur, et l'instant de son émission par le satellite, mesuré à l'échelle du satellite, multiplié par la vitesse de la lumière, s'appelle pseudo-distance. Pourquoi pseudo-portée ? Parce qu'elle diffère de la vraie portée d'une quantité égale au produit de la vitesse de la lumière et de la « dérive » de l'échelle de temps du récepteur par rapport à l'échelle de temps du système. Lors de la résolution du problème de navigation, ce paramètre est déterminé avec les coordonnées du consommateur (récepteur).
Des intégrales de corrélation formées dans le corrélateur permettent de suivre la modulation du signal satellite par des symboles d'information et de calculer l'horodatage dans le signal d'entrée. Les horodatages suivent à des intervalles de 6 s pour le GPS et de 2 s pour le GLONASS et forment une sorte d'échelle de 6 (2) secondes. A l'intérieur d'une division de cette échelle, les périodes du code de télémétrie forment une échelle de 1 ms. Une milliseconde est divisée, à son tour, en éléments distincts (puces, dans la terminologie GPS) : pour GPS - 1023, pour GLONASS - 511. Ainsi, les éléments du code télémètre permettent de déterminer la distance au satellite avec une erreur de »300 m. Pour une détermination plus précise, il est nécessaire de connaître la phase du générateur de code de télémétrie. Les schémas de construction des générateurs de référence du corrélateur permettent de déterminer sa phase avec une précision allant jusqu'à 0,01 période, ce qui est une précision de détermination de la pseudo-portée de 3 m.
Sur la base des mesures des paramètres de l'oscillation harmonique de référence générée par le système PLL, la fréquence et la phase de l'oscillation de la porteuse du satellite sont déterminées. Sa dérive par rapport à la valeur nominale donnera le décalage de fréquence Doppler, qui permet d'estimer la vitesse de l'utilisateur par rapport au satellite. De plus, des mesures de phase de porteuse peuvent être utilisées pour affiner la distance jusqu'au satellite avec une erreur de plusieurs millimètres.
Pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible. Afin que le consommateur puisse déterminer les coordonnées des satellites, les signaux de navigation émis par ceux-ci sont modélisés par des messages sur les paramètres de leur mouvement. Dans l'équipement du consommateur, ces messages sont extraits et les coordonnées des satellites sont déterminées à l'instant souhaité.
Les coordonnées et les composantes du vecteur vitesse changent très rapidement, par conséquent, les messages sur les paramètres du mouvement des satellites contiennent des informations non pas sur leurs coordonnées et composantes du vecteur vitesse, mais sur les paramètres d'un certain modèle qui se rapproche de la trajectoire de l'engin spatial sur un intervalle de temps suffisamment grand (environ 30 minutes). Les paramètres du modèle d'approximation changent assez lentement, et ils peuvent être considérés comme constants sur l'intervalle d'approximation.
Les paramètres du modèle d'approximation sont inclus dans les messages de navigation des satellites. Le système GPS utilise le modèle de mouvement Keplerian avec des éléments osculateurs. Dans ce cas, la trajectoire de vol de l'engin spatial est divisée en tronçons d'approximation d'une durée d'une heure. Au centre de chaque tronçon est fixé un moment nodal dont la valeur est communiquée au consommateur d'informations de navigation. De plus, le consommateur est informé des paramètres du modèle des éléments osculateurs au point nodal dans le temps, ainsi que des paramètres des fonctions qui approximent les changements des paramètres du modèle des éléments osculateurs dans le temps, à la fois en l'élément nodal précédent et le suivant.
Dans l'équipement du consommateur, un intervalle de temps est alloué entre l'instant temporel auquel il faut déterminer la position du satellite et l'instant nodal. Puis, à l'aide des fonctions d'approximation et de leurs paramètres, extraits du message de navigation, les valeurs des paramètres du modèle des éléments osculateurs sont calculées au moment voulu. Au dernier stade, en utilisant les formules usuelles du modèle képlérien, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées.
Le système Glonass utilise des modèles de mouvement différentiels pour déterminer la position exacte du satellite. Dans ces modèles, les coordonnées et les composantes du vecteur vitesse du satellite sont déterminées par intégration numérique des équations différentielles du mouvement de l'engin spatial, en tenant compte d'un nombre fini de forces agissant sur l'engin spatial. Les conditions initiales d'intégration sont fixées à l'instant nodal situé au milieu de l'intervalle d'approximation.
Comme mentionné ci-dessus, pour déterminer les coordonnées du consommateur, il est nécessaire de connaître les coordonnées des satellites (au moins 4) et la distance du consommateur à chaque satellite visible, qui est déterminée dans le récepteur de navigation avec une précision d'environ 1 m Pour plus de commodité, considérons le cas «plat» le plus simple illustré à la Fig. ... huit.
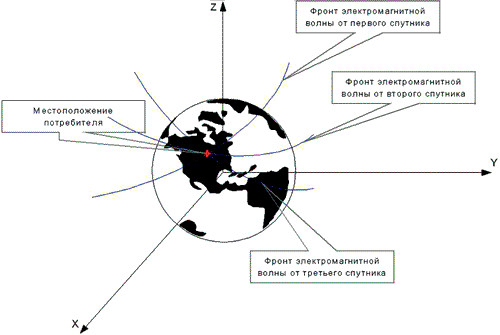
Détermination des coordonnées du consommateur
Chaque satellite peut être considéré comme un émetteur ponctuel. Dans ce cas, le front de l'onde électromagnétique sera sphérique. Le point d'intersection des deux sphères sera celui où se trouve le consommateur.
L'altitude des orbites des satellites est d'environ 20 000 km. Par conséquent, le deuxième point d'intersection des cercles peut être écarté en raison d'une information a priori, car il est situé loin dans l'espace.
Mode différentiel
Les systèmes de navigation par satellite permettent à l'utilisateur d'obtenir des coordonnées avec une précision de l'ordre de 10 à 15 m. Cependant, pour de nombreuses tâches, notamment pour la navigation dans les villes, une plus grande précision est requise. L'une des principales méthodes pour augmenter la précision de la détermination de la localisation d'un objet repose sur l'application du principe des mesures différentielles de navigation, connu en radionavigation.
Le mode différentiel DGPS (Differential GPS) vous permet de définir des coordonnées avec une précision de 3 m dans un environnement de navigation dynamique et jusqu'à 1 m dans des conditions stationnaires. Le mode différentiel est mis en œuvre à l'aide d'un récepteur de contrôle GPS appelé station de référence. Il est situé en un point dont les coordonnées sont connues, dans la même zone que le récepteur GPS principal. En comparant les coordonnées connues (obtenues à la suite d'un levé géodésique de précision) avec celles mesurées, la station de référence calcule des corrections, qui sont transmises aux consommateurs par radio dans un format prédéterminé.
L'équipement du consommateur reçoit des corrections différentielles de la station de référence et les prend en compte lors de la détermination de la localisation du consommateur.
Les résultats obtenus par la méthode différentielle dépendent fortement de la distance entre l'objet et la station de référence. L'application de cette méthode est la plus efficace lorsque les erreurs systématiques dues à des raisons externes (en relation avec le récepteur) sont répandues. Selon les données expérimentales, il est recommandé de localiser la station de référence à moins de 500 km de l'objet.
Actuellement, il existe de nombreux systèmes différentiels à large écart, régionaux et locaux.
En tant que systèmes étendus, il convient de noter des systèmes tels que le WAAS américain, l'EGNOS européen et le MSAS japonais. Ces systèmes utilisent des satellites géostationnaires pour transmettre des corrections à tous les clients dans leur zone de couverture.
Les systèmes régionaux sont destinés à soutenir la navigation de sections individuelles de la surface de la terre. En règle générale, les systèmes régionaux sont utilisés dans les grandes villes, sur les voies de transport et les rivières navigables, dans les ports et le long du littoral et des océans. Diamètre de la zone de travail système régional généralement entre 500 et 2000 km. Il peut comprendre une ou plusieurs stations de référence.
Les systèmes locaux ont une portée maximale de 50 à 220 km. Ils comprennent généralement une station de base. Les systèmes locaux sont généralement classés selon leur mode d'utilisation : stations différentielles locales marines, aéronautiques et géodésiques.
Développement de la navigation par satellite
L'orientation générale de la modernisation des systèmes satellitaires GPS et Glonass est associée à l'augmentation de la précision des définitions de navigation, à l'amélioration du service fourni aux utilisateurs, à l'augmentation de la durée de vie et de la fiabilité des équipements embarqués des satellites, à l'amélioration de la compatibilité avec d'autres systèmes radio et au développement sous-systèmes différentiels. L'orientation générale du développement des systèmes GPS et Glonass coïncide, mais la dynamique et les résultats obtenus sont très différents.
L'amélioration du système GLONASS est prévue sur la base des satellites GLONASS-M de nouvelle génération. Ce satellite aura une durée de vie accrue et transmettra un signal de navigation dans la bande L2 pour les applications civiles.
Une décision similaire a été prise aux États-Unis, où le 5 janvier 1999, elle a annoncé l'allocation de 400 millions de dollars pour la modernisation du système GPS, associée à la transmission du code C/A sur la fréquence L2 (1222,7 MHz ) et l'introduction de la troisième porteuse L3 (1176, 45 MHz) sur les engins spatiaux qui seront lancés à partir de 2005. Le signal sur la fréquence L2 est destiné à être utilisé pour des besoins civils, non directement liés au danger pour la vie humaine. Il est proposé de commencer à mettre en œuvre cette décision en 2003. Il a été décidé d'utiliser le troisième signal civil sur la fréquence L3 pour les besoins de l'aviation civile.
Liste des abréviations
NFME - équipement de contrôle de terrain de navigation
AKS - équipement de système de commande embarqué
ASCh - étalons de fréquence atomique
LSI - Station de mesure sans demande
BVK - complexe informatique de bord
BNP - émetteur de navigation embarqué
BTS - système de télémétrie embarqué
BU - unité de contrôle
BUK - complexe de contrôle embarqué
BH - chronomètre embarqué
BC - centre balistique
BSHV - à bord ШВ
ГВМ - modèle dimensionnel et poids
SRNS - système de radionavigation par satellite
DN - diagramme directionnel
UE KVO - Unis système mondial prise en charge du temps de coordonnées
ZIS - station de mesure d'enquête
ZRV - zone de visibilité radio
SC - vaisseau spatial
KIS - poste de commande et de mesure
KOS - stations optiques quantiques
KS - postes de contrôle
LDPS - Sous-système différentiel local
ICBM - Missile balistique intercontinental
MB - horodatage
NAP - équipement de navigation grand public
NCA - vaisseau spatial de navigation
NKU - complexe de contrôle au sol
NSVT - navigation de haute précision
НССТ - signal de navigation de précision moyenne
OG - constellation orbitale
PSP - séquence pseudo-aléatoire
PKU - sous-systèmes de surveillance et de contrôle
Forces de fusées stratégiques - forces de missiles stratégiques
SC - système de correction
SCF - système de contrôle de phase
CO - système d'orientation et de stabilisation
SC - système de correction
BOT - système d'alimentation
FM - déphasage
ChVO - support temps-fréquence
CWP - correction temps-fréquence
QI - informations numériques
CS - synchroniseur central
TsUS - centre de contrôle du système GLONASS
ШВ - échelle de temps
EI - informations sur les éphémérides
EO - disposition des éphémérides
UTC - Temps universel coordonné
Livres d'occasion
1. Systèmes d'ingénierie radio. Éd. Kazarinova Yu.M. M. : Lycée, 1990.
2. Soloviev Yu.A. Systèmes de navigation par satellite. M. : Eco-Tendances, 2000.
3. Système mondial de radionavigation par satellite GLONASS / Ed. V.N. Kharisova, A.I. Perov, V.A. Boldin. M. : IPRZhR, 1998.
4. Lipkin I.A. Systèmes de navigation par satellite. M. : Vuzovskaya kniga, 2001.
5. Système mondial de navigation par satellite GLONASS. Document de contrôle des interfaces. M. : TRICOT VKS, 1995.