Résumé : Systèmes de communication par satellite. Systèmes de navigation par satellite
Envoyer votre bon travail dans la base de connaissances est simple. Utilisez le formulaire ci-dessous
Les étudiants, les étudiants diplômés, les jeunes scientifiques qui utilisent la base de connaissances dans leurs études et leur travail vous en seront très reconnaissants.
Hébergé sur http://www.allbest.ru/
Résumé sur le sujet :
Réalisé par : étudiant de 2ème année,
spécialiste. la gestion des terres
Bryansky MS
Vérifié par : Ivanova T.I.
Irkoutsk 2011
introduction
2.2 Système de satellites GPS
4. Récepteurs satellites géodésiques modernes
introduction
Cet essai traite des systèmes satellitaires mondiaux, de leur objectif, de leurs types et de leur principe de fonctionnement.
Les systèmes de positionnement vous permettent d'augmenter la productivité en géophysique de terrain : travaux cameral, de terrain et géodésiques. Les nouveaux systèmes de gestion des transports développés ces dernières années permettent à l'opérateur de voir l'objet généré par ordinateur et de mettre à jour les informations le concernant. Tout cela et bien plus encore a été apporté aux développements de ces dernières années en géodésie.
1. L'émergence des systèmes de navigation par satellite
Apparence satellites artificiels La Terre a révolutionné les méthodes de géodésie et a considérablement augmenté la précision de la navigation et la détermination de la position des points et des objets à la surface de la Terre.
La géodésie satellitaire, axée sur la réalisation de mesures géodésiques précises à la surface de la Terre à l'aide de satellites terrestres artificiels (AES), est apparue à la fin des années 50, immédiatement après le lancement des premiers satellites.
La période allant jusqu'en 1970 a été caractérisée par le développement de méthodes fondamentales d'observation par satellite, principalement la photographie de satellites avec des caméras spécialement conçues, ainsi que des méthodes de calcul et d'analyse orbites des satellites. Dans le même temps, les premières tentatives ont été faites pour construire des réseaux géodésiques mondiaux à l'aide de satellites passifs. Une attention considérable a été accordée à l'étude du champ gravitationnel global de la Terre.
La période de 1970 à 1980 est marquée par le développement de nouveaux outils et méthodes d'observation, comme les méthodes laser de mesure des distances aux satellites et l'altimétrie satellitaire. Une grande réussite scientifique et pratique sont les systèmes de satellites Doppler Cicada développés à cette époque ( Union soviétique) et Transit (États-Unis). L'augmentation de la précision des mesures par satellite a ouvert la possibilité d'une étude plus détaillée du taux de rotation de la Terre, des modèles de mouvement de ses pôles, des déformations de la croûte terrestre et d'autres paramètres.
Depuis 1950, il y a eu une utilisation pratique à grande échelle des technologies satellitaires dans la géodésie, la géodynamique, la topographie, la gestion des terres et d'autres domaines connexes. Cela est principalement dû à la poursuite de l'amélioration des systèmes de radionavigation, exprimée dans l'utilisation de méthodes de mesure plus avancées, de paramètres orbitaux plus performants, d'un certain nombre d'autres solutions techniques, ainsi que du développement général la technologie informatique. Permettre la création d'instruments géodésiques de terrain hautement automatisés. Radios multifonctions créées à ce stade systèmes de navigation GLONASS (Union soviétique) et Navstar (SITA) ont permis d'atteindre le niveau de précision millimétrique en mesurant jusqu'à mille kilomètres ou plus.
En 1963, les travaux ont commencé sur la construction du premier système national de navigation par satellite en orbite basse "Cicada". En 1967, le premier satellite de navigation domestique Kosmos-192 a été lancé en orbite. Pour les systèmes de radionavigation par satellite de première génération, il est typique d'utiliser des satellites en orbite basse et d'utiliser le signal d'un satellite actuellement visible pour mesurer les paramètres de navigation d'un objet.
Sur cette base, dans l'intérêt de l'assistance à la navigation, en 1964, le système de radionavigation par satellite Doppler de première génération "Transit" a été créé, conçu pour fournir une assistance à la navigation pour le lancement de missiles balistiques Polaris à partir de sous-marins. Après la mise à disposition du système pour un usage commercial en 1967, le nombre d'utilisateurs civils a rapidement dépassé le nombre d'utilisateurs militaires.
Tout comme dans le système Cicada, dans le système Transit, les coordonnées de la source sont calculées à partir du décalage de fréquence Doppler du signal de l'un des 7 satellites visibles qui ont des orbites polaires circulaires avec une hauteur au-dessus de la surface de la Terre d'environ 100 km. La période orbitale des satellites Transit est de 107 minutes.
En 1964, aux États-Unis, des recherches ont commencé sur la possibilité d'utiliser des signaux à large bande modulés par des codes de bruit pseudo-aléatoires à des fins de positionnement, ce qui, basé sur la séparation par corrélation de tels signaux, permettait d'utiliser une fréquence porteuse par plusieurs émetteurs.
Le système satellitaire russe GLONASS est un système mondial de navigation par satellite, dont le développement a commencé au milieu des années 1970 et, en 1995, le gouvernement de la Fédération de Russie, par décret spécial n ° 237, a ouvert le système à un usage civil et à la coopération internationale. La technique utilisée nécessite au moins 4 satellites dans le champ de vision de chaque utilisateur à tout moment, de sorte que les hauteurs d'orbite et le nombre de satellites dans les systèmes de deuxième génération sont considérablement augmentés. Le déploiement de la première phase du système, qui implique l'utilisation de 10-12 satellites dans deux avions, a été achevé en 1991. En février 1992, le nombre de satellites fonctionnant simultanément a atteint pour la première fois 12. Actuellement (2006) , le nombre de satellites GLONASS en fonctionnement est de 17.
V Fédération Russe l'utilisation de récepteurs satellites pour le positionnement global est restreinte - une licence est requise pour leur utilisation. Le principal développeur et créateur du système dans son ensemble et du segment spatial est NPO Applied Mechanics (Krasnoyarsk) et pour les engins spatiaux de navigation - PA Polet (Omsk). Le principal développeur de complexes d'ingénierie radio est RNIIKP; L'Institut russe de radionavigation et de temps a été nommé responsable de la création d'un complexe temporaire, d'un système de synchronisation et d'équipements de navigation pour les consommateurs.
2. Systèmes mondiaux de navigation par satellite
Système mondial de navigation par satellite (système mondial de navigation système satellite- GNSS) sont des systèmes satellitaires (les plus couramment utilisés pour déterminer l'emplacement en tout point de la surface de la terre à l'aide de récepteurs de navigation ou géodésiques spéciaux. La technologie GNSS a trouvé une large application dans la géodésie, le cadastre urbain et foncier, l'inventaire des terres, la construction d'ouvrages d'art , en géologie, etc.
Le plus prometteur systèmes spatiaux, servant à résoudre les problèmes géodésiques, sont les systèmes de positionnement global GLONASS (RF), GPS (USA) et Galileo (système européen). Ces systèmes sont des outils extrêmement précis pour résoudre des problèmes appliqués de géodésie, de géophysique et d'utilisation des terres. Ils sont conçus pour déterminer avec une grande précision les trois coordonnées du lieu, les composantes des vecteurs vitesse et temps de divers objets en mouvement.
Il existe actuellement deux systèmes mondiaux de radionavigation par satellite de deuxième génération :
Système russe (anciennement soviétique) GLONASS (système mondial de navigation par satellite)
Américain, appelé "Navstar" (Navigational Satellite Time and Ranging - satellite de navigation permettant de mesurer le temps et les coordonnées) ou par sa vocation réelle GPS (Global Positioning System - système de positionnement global).
Les systèmes satellitaires, en plus des déterminations de navigation, permettent une synchronisation mutuelle de haute précision des normes de fréquence et de temps sur des objets au sol distants et un référencement géodésique mutuel, ainsi que la détermination de l'orientation d'un objet sur la base de mesures effectuées à partir de quatre récepteurs de signaux de satellite de navigation.
Les principaux avantages du positionnement par satellite sont tous temps, global, efficacité, précision et efficacité. Ces qualités dépendent de la conception balistique du système, de la grande stabilité des étalons de fréquence embarqués, du choix du signal et des méthodes de son traitement, ainsi que des méthodes d'élimination et de compensation des erreurs. Les paramètres des systèmes et de leurs éléments individuels, ainsi que le logiciel, sont sélectionnés de manière à ce que l'erreur des déterminations de navigation en termes de coordonnées ne dépasse pas 10 m et en termes de vitesse jusqu'à 0,05 m/s.
Les systèmes de positionnement par satellite modernes se composent de trois parties, appelées secteurs (sous-systèmes):
secteur spatial, qui comprend un ensemble de satellites, appelé "constellation" ;
· Secteur de commandement et de contrôle, composé d'une station centrale (principale) et de plusieurs stations de suivi situées dans différentes parties du globe. De plus, il existe des moyens de déployer et de réapprovisionner le système (cosmodrome);
· le secteur des utilisateurs, qui comprend des équipements d'utilisateurs répandus.
secteur de la consommation
Le secteur grand public est un ensemble d'équipements satellites qui vous permet de recevoir les coordonnées du point d'observation, l'heure exacte, ainsi que la vitesse et la direction de déplacement de l'objet. Pendant le fonctionnement, les signaux radio sont reçus des satellites, les valeurs déterminées sont enregistrées, les résultats sont prétraités directement sur le terrain, puis le traitement final (appelé «post-traitement») des matériaux est effectué en laboratoire, ce qui permet d'obtenir les valeurs finales des quantités qui intéressent le consommateur.
Les équipements satellitaires peuvent être utilisés à des fins militaires et doivent donc fonctionner rapidement et de manière fiable dans les conditions des opérations militaires. Cela crée des conditions dans lesquelles l'utilisation du système de positionnement n'était pas disponible pour un ennemi potentiel. L'utilisation civile des équipements satellitaires est centrée sur son utilisation en navigation, ainsi qu'en géodésie.
2.1 Système satellitaire GLONASS
Caractéristiques techniques du système satellitaire GLONASS
Le système GLONASS est considéré comme un système à double usage, c'est-à-dire qu'il peut être utilisé à la fois à des fins militaires et civiles, et a été développé sur ordre du ministère de la Défense. Dans son objectif et sa construction, le système GLONASS est similaire au Navstar américain et ne lui est pas inférieur en termes d'indicateurs de sortie. Le système GLONASS est sans demande, donc le nombre d'utilisateurs du système n'a pas d'importance.
Les satellites du système GLONASS sont livrés sur l'orbite de travail par des porteurs Proton à 4 étages, 3 pièces chacun en un seul lancement. Avec une période de révolution initiale de 675 minutes, les satellites dérivent le long de l'orbite de travail jusqu'aux points de localisation désignés, où ils sont stabilisés à l'aide d'un moteur embarqué, portant la période de révolution à 675,7 minutes. Hauteur de l'orbite - 19100 km, inclinaison (l'angle formé par le plan de l'orbite et le plan de l'équateur) - 64,8 °, période de révolution - 11 heures 15 minutes. 44 p. Les orbites sont multiples et fournissent une répétition du trajet au sol de chaque satellite en 8 jours après avoir effectué 17 orbites. Cela présente certains avantages pour stade initial, alors que tous les avions orbitaux et emplacements de satellites ne sont pas encore impliqués. De plus, il est beaucoup moins susceptible de devoir corriger des orbites.
GLONASS vous permet de créer un champ de navigation continu au-dessus de la surface de la Terre jusqu'à une hauteur de 2000 km, à l'intérieur duquel l'utilisateur peut à tout moment recevoir des signaux de radionavigation d'au moins quatre satellites. La durée de fonctionnement du satellite de première génération GLONASS-M est de 5 ans, période pendant laquelle les paramètres de son orbite ne doivent pas différer des valeurs nominales de plus de 5%. Le satellite lui-même pèse jusqu'à 1415 kg et est un conteneur scellé d'un diamètre de 1,35 m et d'une longueur de 7,84 m, à l'intérieur duquel l'équipement est placé.
Chaque satellite est construit à l'aide d'un compartiment à instruments scellé. À l'intérieur du compartiment, à l'aide d'un circuit de gaz actif, d'un système de volets à entraînements électriques et d'un ensemble de chauffages contrôlés, des conditions confortables sont maintenues en termes de température dans la plage de 0 à 40 °C. Là où se trouvent les blocs d'étalons de fréquence, une zone de stabilisation thermique est créée à ±1 °С. Tous les dispositifs générateurs de chaleur de l'équipement cible sont placés à l'extérieur de l'unité d'instrumentation scellée sur le module d'antenne dans des zones non éclairées par le soleil.
Le système de correction utilisant le système de propulsion fonctionne après la mise en orbite de l'engin spatial en train de l'amener au point système et vous permet de maintenir l'engin spatial dans les limites spécifiées (± 5 ° dans l'argument de latitude) sans corrections ultérieures pendant le toute la vie de l'engin spatial. L'orientation des axes longitudinaux et transversaux de l'engin spatial, ainsi que des panneaux solaires, est assurée à l'aide de volants électriques, périodiquement déchargés par des électroaimants.
Lors de la deuxième étape de modernisation de la constellation GLONASS, le vaisseau spatial GLONASS-K est utilisé, qui présente les caractéristiques distinctives suivantes par rapport à GLONASS-M :
· une troisième fréquence a été introduite dans la bande L pour améliorer la précision et la fiabilité des déterminations de navigation des consommateurs ;
· la durée d'existence active de l'engin spatial a été portée à 10 ans ;
La masse du vaisseau spatial a été réduite d'environ 2 fois;
placé supplémentaire charge utile, y compris le matériel de sauvetage des personnes en détresse.
Le vaisseau spatial GLONASS-M (SC) peut être lancé dans un schéma de groupe de 3 SC simultanément depuis le cosmodrome de Baïkonour en utilisant le lanceur Proton (Proton-M) et dans un schéma unique depuis le cosmodrome de Plesetsk en utilisant le Soyouz-2".
Comme indiqué précédemment, le nombre de satellites GLONASS en exploitation est actuellement de 17. Avant la fin de 2006, trois autres satellites GLONASS-M seront lancés et, en 2007, trois autres satellites. En 2008, il est prévu de tester un satellite de nouvelle génération GLONASS-K, qui a une masse plus faible, Meilleure performance et une durée de fonctionnement garantie en orbite de 10 à 12 ans.
2.2 Système de satellites GPS
GPS (Global Positioning System) - satellites de navigation qui fournissent des mesures de temps et de distance ; système de positionnement global, souvent appelé GPS. Vous permet de déterminer l'emplacement et la vitesse des objets n'importe où sur la Terre (à l'exclusion des régions polaires), par presque tous les temps, ainsi que dans l'espace extra-atmosphérique près de la planète. Le plus largement utilisé à l'heure actuelle est le système par satellite GPS (Global Positioning System), qui est associé à l'émergence d'un nouveau terme - positionnement (positionnement). Le positionnement fait référence à la détermination de l'emplacement d'un objet, de la vitesse de son déplacement, du vecteur spatial entre les points d'observation et de l'heure exacte de détermination de son emplacement. Le développement de ce système a commencé en 1973. La disponibilité opérationnelle a été annoncée en 1995.
Un système de satellites GPS développé et exploité par le département américain de la Défense, à sa manière Fonctionnalité similaire Système russe GLONASS. Les engins spatiaux de navigation du système GPS ont également subi un certain nombre d'améliorations.
Dans l'intérêt de la communauté mondiale, il est utilisé conformément à des dispositions particulières. Les États-Unis fournissent le système en mode standard pour une utilisation civile, commerciale et scientifique. Le département américain des transports est responsable de l'utilisation du système par les utilisateurs civils.
Le principe de base de l'utilisation du système est de déterminer l'emplacement en mesurant les distances à l'objet à partir de points avec des coordonnées connues - les satellites. La distance est calculée à partir du temps de propagation du signal entre son envoi par le satellite et sa réception par l'antenne du récepteur GPS. c'est-à-dire pour déterminer Coordonnées 3D Le récepteur GPS doit connaître la distance à trois satellites et l'heure du système GPS. Ainsi, pour déterminer les coordonnées et la hauteur du récepteur, les signaux d'au moins quatre satellites.
2.3 Système satellitaire Galileo
Galileo est un projet conjoint entre l'Union européenne et le agence spatiale, système de navigation par satellite fait partie du projet de transport Réseaux transeuropéens (réseaux transeuropéens). Le système est conçu pour résoudre les problèmes de navigation pour tout objet en mouvement avec une précision inférieure à un mètre. Existe actuellement Récepteurs GPS ne pourra pas recevoir et traiter les signaux des satellites Galileo, bien qu'un accord ait été conclu sur la compatibilité et la complémentarité avec le système GPS NAVSTAR troisième génération. Le projet sera financé, entre autres, par la vente de licences aux fabricants de récepteurs.
Outre les pays de l'Union européenne, des accords ont été conclus sur la participation au projet avec les États - Chine, Israël, Corée du Sud, Ukraine et Russie Par ailleurs, des négociations sont en cours avec Argentine, Australie Brésil, Chili, Malaisie. Galileo devrait devenir opérationnel en 2014-2016, lorsque orbite tous les 30 prévus satellites(27 opérationnels et 3 de réserve). Arianespace a signé un contrat pour 10 lanceurs " syndicat» pour lancer des satellites à partir de 2010. Segment spatial sera complétée par une infrastructure au sol, comprenant trois centres de contrôle et un réseau mondial de stations émettrices et réceptrices.
Contrairement à l'américain GPS et russe GLONASS, le système Galileo n'est pas contrôlé par les départements militaires nationaux, cependant, en 2008, le Parlement européen a adopté une résolution "L'importance de l'espace pour la sécurité de l'Europe", selon laquelle l'utilisation de signaux satellitaires pour des opérations militaires menées dans le cadre de La politique de sécurité européenne est autorisée. Le développement est assuré par l'Agence spatiale européenne. Le coût total de création du système est estimé à 4,9 milliards d'euros.
Au 19 janvier 2011, pour la finalisation du projet européen de création d'un système navigation par satellite Il manque 1,9 milliard d'euros à Galileo. C'est ce qu'a déclaré lors d'un briefing à Strasbourg le vice-président de la Commission européenne, responsable de l'industrie et de l'entrepreneuriat, Antonio Taiani, présentant un rapport intermédiaire sur la création du système.
orbite de géodésie satellite
3. Équipement géodésique par satellite
Se compose d'un ensemble d'accessoires. L'ensemble d'un récepteur satellite comprend: antenne, récepteur, contrôleur (dispositif de contrôle), alimentation (pour charger les batteries et l'alimentation secteur), batteries ou batteries, câbles, trépied ou perche, ainsi que des dispositifs pour monter ou monter l'antenne sur eux, un sac à dos ou une valise, des housses, etc. du matériel. Lorsque vous travaillez en temps réel, il doit y avoir un modem radio avec une alimentation et une antenne radio. Pour traiter les résultats des observations, un ordinateur est nécessaire et Logiciel. Actuellement, les récepteurs satellites sont produits par plus de 400 entreprises, et ils se caractérisent par une variété relativement grande, mais les caractéristiques distinctives des récepteurs fabriqués par diverses entreprises, dans la plupart des cas, sont de nature sans principes.
3.1 Caractéristiques techniques des équipements satellites géodésiques
Lors de mesures géodésiques à la surface de la terre, ils sont principalement utilisés, théodolites niveaux et stations totales électroniques. Tous ces appareils ont atteint un niveau de perfection assez élevé et fonctionnent dans le domaine optique des ondes électromagnétiques. L'amélioration de la précision des mesures géodésiques est principalement limitée par l'influence de l'atmosphère et non par les capacités techniques des instruments de haute précision. Une augmentation supplémentaire de la précision des mesures géodésiques au sol à l'aide d'instruments géodésiques traditionnels n'est possible que si l'on utilise des méthodes de mesure qui tiennent compte de l'influence de l'atmosphère.
Une autre façon d'améliorer l'efficacité des mesures géodésiques est l'utilisation de méthodes de mesure par satellite utilisant les positions instantanées des satellites artificiels de la Terre comme points de référence.
Lors de l'élaboration de méthodes de mesure par satellite, des méthodes telles que la triangulation par satellite basée sur l'utilisation de mesures angulaires et la trilatération par satellite basée sur l'utilisation de mesures linéaires ont été envisagées.
Lors de l'utilisation de la triangulation par satellite, à partir du lancement du premier satellite terrestre artificiel soviétique, la méthode de photographie des satellites sur fond d'étoiles a été utilisée. A partir de ces images, en combinaison avec les méthodes photogrammétriques correspondantes, nous avons obtenu les informations nécessaires sur les directions d'orientation utilisées dans la construction du réseau géodésique global. Cette méthode a fourni une précision de mesure relativement faible. Les observations nécessitaient un ciel clair au moins en deux points séparés par de grandes distances ; de plus, le matériel était coûteux et lourd. Pour cette raison, cette méthode a été remplacée par la trilatération par satellite, qui est encore utilisée aujourd'hui.
La trilatération satellite peut, par exemple, être réalisée à l'aide de télémètres fonctionnant dans le domaine optique.
Les télémètres optiques, qui utilisent un laser comme émetteur, offrent une plage de mesure importante et une grande précision, mais ils sont assez coûteux, encombrants et nécessitent une bonne visibilité au moment de l'observation. Pour cette raison, ils sont d'un usage limité et sont principalement utilisés aux points d'observation du secteur de commandement et de contrôle spatial au sol pour affiner les orbites des satellites, déterminer les longueurs de bases de haute précision, etc. Parmi ces dispositifs, on peut citer le système de télémètre Syllvania et le système laser Wett-Zell, dont l'objet réfléchissant est le satellite.
De plus, des altimètres satellites ont été créés, par exemple "Geosat", "ERS", etc., qui ont été installés sur le satellite, et la surface de la Terre a été utilisée comme surface réfléchissante.
Une autre direction est liée à l'utilisation des systèmes radio. Dans le même temps, l'expérience de la création de systèmes de télémétrie Doppler, tels que Decca, Hiran, Transit et Cicada, a été prise en compte. Pour améliorer la précision des systèmes de télémétrie radio, la méthode de mesure de phase a été utilisée.
4. Récepteurs satellites géodésiques modernes
Les récepteurs satellites modernes ont un programme qui analyse la position relative de tous les satellites disponibles pour l'observation et sélectionne les quatre les mieux situés parmi eux, qui sont utilisés pour déterminer les coordonnées d'un point. Des résultats plus précis sont obtenus lorsque les distances mesurées à tous les satellites dans le champ de vision sont traitées. Par conséquent, l'un des domaines les plus importants pour améliorer et développer la radionavigation par satellite est l'utilisation conjointe des signaux GLONASS et GPS, et à l'avenir - Galileo. Les principaux objectifs de ce processus sont d'améliorer la précision et la fiabilité (disponibilité, continuité de service et intégrité) des définitions de navigation.
Selon la complexité des solutions techniques et le volume des coûts matériels, les récepteurs satellites sont divisés en :
monocanal (y compris multiplex, le récepteur bascule très rapidement entre les signaux de la constellation orbitale), qui à chaque instant actuel reçoit et traite le signal radio d'un seul satellite, et
· multicanal, permettant de recevoir et de traiter simultanément les signaux de plusieurs satellites.
Actuellement, les récepteurs multicanaux sont principalement produits.
De plus, les récepteurs peuvent être divisés en système unique, recevant des signaux GPS, et en système double, recevant des signaux GLONASS et GPS. Selon le type de signaux reçus et traités, les récepteurs sont divisés en :
monofréquence, codé, fonctionnant selon le code C / A;
bi-fréquence, codé ;
phase de code à fréquence unique ;
· code-phase à deux fréquences.
Les récepteurs de code (portatifs) sont conçus pour déterminer la position tridimensionnelle d'un point, la vitesse et la direction du mouvement. Ils permettent de déterminer la position prévue d'un point, en règle générale, avec une précision de quelques mètres, et la position d'altitude est déterminée avec une précision d'environ 10 m (les récepteurs de code à deux fréquences offrent une précision submétrique). Pour améliorer la précision des mesures d'altitude, un altimètre à barre y est intégré. Ces récepteurs sont pratiques pour effectuer des travaux géographiques et géologiques sur le terrain, car vous pouvez afficher une carte d'itinéraire à l'écran, déterminer votre emplacement, la distance, la direction et l'heure d'arrivée à la cible. Les résultats obtenus peuvent être accumulés et stockés dans la mémoire de l'instrument, puis entrés dans un ordinateur pour un traitement ultérieur. Ces récepteurs sont de petite taille et de poids réduit, fonctionnent dans une large plage de températures et consomment peu d'énergie.
Les récepteurs GNSS modernes vous permettent de travailler avec les systèmes GLONASS et GPS, tout en recevant un signal via des canaux universels, ce qui augmente la précision et la productivité du travail effectué. Au cours des dernières années, les systèmes de positionnement par satellite de haute précision sont devenus partie intégrante des travaux de géodésie et d'arpentage. Ces systèmes (SIG GPS / Glonass) sont utilisés pour créer une justification géodésique de référence, des relevés topographiques détaillés, implanter un projet, etc. L'utilisation de systèmes de positionnement par satellite (GNSS / Glonass) peut améliorer considérablement la précision et la productivité des travaux géodésiques sur le terrain et par caméra, ce qui améliore considérablement la qualité du support géodésique et minier pour les entreprises. La détermination des coordonnées spatiales en temps réel offre des opportunités supplémentaires pour automatiser des processus tels que la disposition des grilles de construction, la surveillance géodésique des structures d'ingénierie (immeubles de grande hauteur, ponts, barrages, etc.), l'observation de la position spatiale des grands mécanismes industriels. Leica Geosystems (Suisse) a développé une nouvelle série d'équipements GLONASS / GPS - Leica Viva GNSS. Une caractéristique distinctive de cette série est la capacité de recevoir les signaux des satellites GNSS existants et prévus à toutes les fréquences (y compris les systèmes GPS L5, GLONASS, les systèmes Alt-Boc Galileo, etc.). Les technologies SmartTrack+, SmartCheck+ et SmartRTK ont été développées et brevetées pour un fonctionnement de haute qualité des équipements satellites avec une réception fiable garantie des signaux satellites GNSS dans toutes les conditions.
La principale tâche résolue à l'aide du GPS en géodésie est la création et la reconstruction de réseaux de référence et de levé, ainsi que le levé topographique à grande échelle de vastes territoires, l'implantation du projet, etc. Dans ces conditions, il est important de choisir les points du réseau géodésique d'état à partir desquels se réfère le réseau géodésique. Des études montrent qu'il est préférable d'utiliser des points du réseau géodésique d'État d'une classe supérieure, situés à une distance de 5 à 15 km des entreprises industrielles. Cela est dû au fait que les points du réseau basés à proximité des installations industrielles se trouvent dans la zone d'influence des facteurs technogéniques.
L'une des caractéristiques fondamentales d'un équipement géodésique de terrain est son degré de sécurité. Les équipements Leica Viva GNSS disposent d'un système de protection certifié selon les normes européennes. Le système garantit une protection totale contre la poussière et l'humidité condensée à 100 % (IP67), les températures de fonctionnement vont de -40 °C à +65 °C. Les appareils résistent à une immersion de courte durée dans l'eau jusqu'à une profondeur de 1 m, à une chute d'une hauteur de 1,5 m sur des surfaces dures, et assurent également un fonctionnement sans perte de signal dans des conditions de fortes vibrations.
Récepteur satellite IG-3K
D'abord un récepteur satellite avec un microbaroniver intégré conçu pour le travail dans des zones fermées (en forêt) peut être appelé IG-3K
Récepteur de navigation à code à double système CH-4001
Ces dernières années, les entreprises produisant des satellites portables (personnels)récepteurs tels que Garmin, Magellan et d'autres, ont également commencé à équiper des récepteurs satellites portables d'altimètres barométriques. La précision de la détermination des coordonnées prévues par ces récepteurs à partir d'observations par satellite est de 3 à 5 m, et les hauteurs mesurées par un altimètre barométrique autonome sont d'environ 3 m, c'est-à-dire supérieures à la détermination des hauteurs à partir d'observations par satellite autonomes.
Récepteur géodésique à deux systèmes GEO-161
Dans les travaux géodésiques, les récepteurs bifréquence et monofréquence à code-phase sont principalement utilisés. Ces dernières années, les récepteurs à deux systèmes se sont répandus parmi eux, offrant une précision et une fiabilité des mesures plus élevées.
Hébergé sur Allbest.ru
Documents similaires
État de la mise en œuvre de l'ATN dans la pratique du trafic aérien. Satellite Informatique dans les systèmes CNS/ATM. Systèmes de radionavigation par satellite. Coordonnées, heure, mouvement des satellites de navigation. Formation d'un signal d'information dans le GPS.
Didacticiel, ajouté le 23/09/2013
Systèmes régionaux de navigation par satellite : Beidau, Galileo, Indian et quasi-anti-aérien. Principe de fonctionnement et éléments principaux : constellation orbitale, segment sol et équipements grand public. Création de cartes pour les systèmes de navigation par satellite.
dissertation, ajouté le 09/03/2015
L'étude du fonctionnement des systèmes de communication, qui peuvent être divisés en : relais radio, troposphérique, satellite, fibre optique. L'étude de l'histoire de l'occurrence, des domaines d'application des systèmes de communication. Répéteurs satellites, communications par satellite dorsales.
résumé, ajouté le 06/09/2010
Systèmes de navigation par satellite d'occasion. Fiabilité, volumes d'équipements locomoteurs et réseau de stations de référence. Le principe de la borne. Règles et normes pour équiper les locomotives de moyens de communication radio et de dispositifs de brouillage.
dissertation, ajouté le 25/02/2016
Principes de fonctionnement des systèmes de navigation par satellite. Exigences pour le SNS : globalité, disponibilité, intégrité, continuité de service. Espace, gestion, segments de consommateurs. Structure orbitale NAVSTAR, GLONASS.
rapport, ajouté le 18/04/2013
Système de navigation par satellite en tant que système électronique et technique complexe, sa structure et son contenu, son objectif et ses caractéristiques fonctionnelles. La composition de l'équipement de l'utilisateur et les règles d'utilisation. Le principe de fonctionnement du GPS et le degré de précision du signal.
dissertation, ajouté le 16/11/2010
Mesures de navigation dans PNA multicanal. La structure des signaux radio de navigation dans les systèmes GLONASS et GPS. Précision de la navigation globale des objets en mouvement au sol. Algorithmes de réception et de mesure des paramètres des signaux de radionavigation par satellite.
dissertation, ajouté le 13/12/2010
Orbites répéteurs satellites. Modulation-démodulation et codage correcteur d'erreurs. codes Bowes-Chowdhury-Hokvingham. Les codes convolutionnels les plus connus. plusieurs protocoles d'accès. Le problème du multiplexage statistique des flux.
test, ajouté le 20/12/2012
Informations générales et historique du développement du système "Glonass", chronologie des améliorations. Navigateurs satellitaires. Précision et accessibilité de la navigation. Développement et production de masse de récepteurs GLONASS domestiques pour les consommateurs. Navigateur GPS à double système.
dissertation, ajouté le 16/11/2014
Trois différents types de satellites : faible, moyen orbite terrestre et géostationnaire. Classification des satellites par zone de service, type de service et nature d'utilisation. Avantages de l'orbite géostationnaire. Satellites en orbite terrestre basse et moyenne.
introduction……………………………………………………………………....4
- Principes de base du fonctionnement des équipements satellitaires.
1.1 Objet et structure du SRNS……………………………………….6
1.2 Fondamentaux des techniques de suivi GPS - Relevés……………………………………………………………………………………………………………… …………………………………………………………………………………
1.3 Appareils utilisés……………………………………………...16
1.4 Logiciel de réglage de réseau géodésique……19
améliorer la précision des marques d'identification de reliure.
3.3 Exigences hygiéniques pour l'organisation du travail………………..41
3.4 Influence de la pollution atmosphérique sur la précision de la détermination des coordonnées des marques d'identification…………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………… ………………………………………………………………………………………………………………………………………………… …………………………………………………………………………………………. Conclusion......................................................................................................49 Applications....................................................................................................51
Liste de la littérature utilisée…………………………………….58
INTRODUCTION
L'utilisation des technologies modernes a considérablement élargi la portée de la résolution des problèmes de navigation et géodésiques. Les systèmes de radionavigation par satellite (GPS, GLONASS) permettent dans la plupart des cas (par rapport aux méthodes traditionnelles) d'obtenir une plus grande précision de la localisation d'un objet avec des coûts économiques moindres lors de la fixation de marques d'identification. La solution de ces problèmes est nécessaire pour divers types d'activités humaines scientifiques et industrielles - des problèmes non seulement liés à la recherche spatiale, à la clarification des coordonnées des points des réseaux géodésiques à diverses fins, au support géodésique pour l'exploration géologique, géophysique, mais aussi construction travaux, cadastre et autres. Les capacités de tels systèmes ont tellement augmenté que, en plus de résoudre les problèmes de détermination des coordonnées géocentriques des points à un niveau de précision d'environ 1 mètre et des coordonnées relatives à un niveau de précision proche de 1 à 2 cm, les individus qui ont besoin d'être suffisamment précis deviennent des consommateurs d'informations de temps-coordonnées. Il existe une base réelle pour l'opinion que dans un proche avenir, les méthodes satellitaires de déterminations géodésiques à diverses fins utilisant le SRNS remplaceront dans la plupart des cas les méthodes classiques traditionnelles. La reliure des marques d'identification est basée sur des systèmes satellitaires classiques et modernes, qui sont basés sur la détermination de la position tridimensionnelle des coordonnées des marques d'identification sur le sol et leur fixation et conception ultérieures de telle sorte qu'elles puissent ensuite être décodé ou reconnu sur des appareils photogrammétriques modernes à des fins de traitement ultérieur des images. Les coordonnées d'identification sont utilisées pour créer la base géodésique initiale, qui est aussi l'information initiale pour obtenir des documents topographiques ou photogrammétriques précis. À l'heure actuelle, tant dans la région de Moscou que dans toute la partie centrale de la Russie, la base géodésique ne dispose pas d'un nombre suffisant de points sur lesquels s'appuyer, et afin de créer un réseau géodésique de référence et de déterminer les coordonnées des marques d'identification, il est nécessaire de disposer d'une base géodésique suffisamment fiable. Il ne sera pas économiquement rentable de créer une telle base par la méthode classique, car vous devrez consacrer beaucoup de temps et d'argent pour effectuer un tel travail, et surtout, il n'y aura aucun gain en précision. À ces fins, vous pouvez utiliser des technologies satellitaires modernes basées sur la détermination simultanée des coordonnées prévues et d'altitude, ce qui est très important pour clarifier la position des marques d'identification au sol. L'objectif de ce travail est d'étudier les spécificités de l'utilisation des outils satellitaires modernes pour améliorer la précision des marquages d'identification.
1. PRINCIPES DE BASE DE FONCTIONNEMENT DES ÉQUIPEMENTS SATELLITES
Sur la base du sujet du travail, il est tout à fait approprié de donner une brève description des équipements SRNS et grand public existants qui ont reçu la plus grande renommée, ainsi que des méthodes d'utilisation des équipements satellitaires dans les travaux topographiques et géodésiques. 1.1 Objet et structure du SRNS 1. Les SRNS sont conçus pour déterminer les coordonnées spatiales du vecteur de localisation et de vitesse des utilisateurs, ainsi que l'heure exacte. 2. Les utilisateurs potentiels du SRNS sont les objets de l'aviation civile et militaire, les navires maritimes et fluviaux, les systèmes de transport et les consommateurs de coordonnées de haute précision (par exemple, les géodésiens). La plupart des SRNS sont structurellement composés de trois parties principales : un segment vaisseau spatial; segment de contrôle et de gestion; segment de l'équipement utilisateur. Le segment des engins spatiaux consiste en une constellation de satellites de navigation (NS) spécialisés et des moyens de les mettre en orbite. Les satellites embarqués disposent de plusieurs étalons de fréquences atomiques de haute précision et, en diffusant en permanence des signaux radio et des messages de navigation depuis le segment de contrôle, créent ainsi un champ de navigation global unique pour le sous-système utilisateur. Segment sol Contrôle et gestion SRNS se compose d'un groupe de stations de suivi, plusieurs stations pour télécharger des messages vers le NS. et la gare principale. Il surveille l'intégrité du système et constitue la principale source d'informations fournies à l'utilisateur. Ses principales tâches sont les suivantes : surveiller le fonctionnement des satellites, collecter les informations nécessaires pour déterminer et prévoir les orbites, former l'heure système et la synchroniser par rapport au temps universel, et stocker les données dans la mémoire embarquée du NS. Le segment des utilisateurs du SRNS est compris comme un ensemble de matériel et de logiciels qui met en œuvre l'objectif principal du SRNS - la détermination des données de navigation sur la terre, la surface de la mer, l'air, l'espace extra-atmosphérique proche de la Terre et les positions géodésiques à la surface de la Terre. Les principaux facteurs de l'utilisation généralisée de l'équipement utilisateur SRNS sont sa capacité tout temps, l'efficacité de la première détermination des coordonnées (< 3 минут от включения приемника), непрерывность определения координат (каждые 0,5 секунды), малые габариты приемников, простота эксплуатации, достаточно высокая точность и относительно небольшая стоимость. 1.2 Fondamentaux de la technique d'arpentage GPS La réalisation de travaux géodésiques à l'aide d'équipements GPS peut être divisée en trois étapes principales : la planification ; partie des travaux sur le terrain (observations satellitaires) ; post-traitement des résultats de mesure. Planification des travaux Sous la planification des travaux s'entend non seulement la conception du réseau de points déterminés, mais aussi le choix des périodes optimales de la journée, les plus favorables du point de vue des meilleurs indicateurs géométriques, l'emplacement des les constellations de satellites et en tenant compte des conditions de proximité (obstacles au passage des signaux des satellites) des points déterminés. Souvent, la planification pour le jour en cours et les jours suivants est suffisante pour effectuer par rapport à un point central dans la zone de travail quotidien prévu. La planification est effectuée à l'aide d'un programme spécial sur un ordinateur personnel, suivie de la publication des résultats sous forme alphanumérique ou graphique sur un écran d'affichage ou une imprimante. Ce programme est un partie intégrante progiciel général. La partie terrain du travail La partie terrain de la méthodologie est le travail d'enquête, qui est effectué conformément à la planification. Comme décrit ci-dessus, les mesures sont effectuées en mode dit différentiel, de sorte qu'au moins deux récepteurs avec antennes sont nécessaires pour le fonctionnement. Il existe plusieurs méthodes pour effectuer des observations satellitaires. Selon plusieurs critères distinctifs (temps d'observation en un point, exigences en nombre de satellites poursuivis, redondance des informations enregistrées, structure d'enregistrement des données, composition des équipements utilisés, technologies des procédures réalisées), elles peuvent être divisées en deux grands groupes : statique et cinématique. Tir statique Statique traditionnel. L'antenne de l'un des récepteurs (celle de base) est fixée dans l'embase du trépied, après quoi elle est nivelée et centrée sur un point géodésique avec des coordonnées connues avec précision), la connaissance des coordonnées du point de base n'est pas obligatoire lors des mesures. L'antenne d'un autre récepteur (mobile) est de même montée sur un trépied au-dessus du point dont les coordonnées doivent être déterminées. Dans ce cas, il est nécessaire de mesurer et d'entrer dans les récepteurs les hauteurs des antennes au-dessus des points (le processus de centrage, de nivellement et de mesure de la hauteur de l'antenne est nécessaire pour projeter la ligne de base réellement mesurée entre les centres de phase des antennes sur des points géodésiques réels). De plus, les deux récepteurs, en appuyant sur quelques touches, sont transférés en mode "prise de vue statique". L'accumulation des informations se fait soit dans la mémoire interne (non volatile) du récepteur, soit sur des cartes magnétiques amovibles pendant 25 à 60 minutes ou plus, selon le nombre de satellites observés et la longueur de la ligne de base. La capacité de mémoire du récepteur (peut être augmentée à la demande de l'utilisateur) est conçue pour une moyenne de 20 à 50 heures de mesures continues. Lors d'une session d'observation, une perte temporaire des signaux des satellites est acceptable. Le nombre minimum de satellites lors des mesures à l'aide de la méthode statique est de 3. La productivité moyenne est de 7 à 10 (jusqu'à 20) points par jour pour un récepteur mobile, en fonction des conditions extérieures, du temps passé à se déplacer entre les points déterminés et l'expérience du personnel. Prise de vue statique "rapide" (récepteurs bi-fréquence uniquement). La procédure d'installation des antennes et de réalisation des mesures est la même qu'en simple "statique", mais la durée de la séance d'observation est réduite à 5 - 20 minutes, en fonction du nombre de satellites suivis et de la distance entre les stations. Une telle réduction significative du temps d'observation est devenue possible grâce à l'introduction de canaux d'information supplémentaires (redondants) (mesure de la phase de la porteuse et des deux codes à deux fréquences) et les derniers algorithmes traitement de données à deux fréquences. Productivité moyenne - 30 à 40 points ou plus par jour, selon le domaine de travail. Relevé cinématique Méthode Stop & Go. L'installation de l'antenne sur la station de base est similaire à une installation statique. L'antenne du récepteur portable est fixée dans un support de montage rapide spécial et centrée sur le premier point, après quoi les informations sont accumulées (30 à 40 minutes) dans un état stationnaire pour initialiser (déterminer certaines conditions initiales) l'ensemble du levé. D'autres méthodes d'initialisation consistent à échanger des antennes à des points de référence ou à démarrer des mesures à partir d'une ligne de base connue. Ensuite, l'antenne avec le récepteur (sans allumer le récepteur) est transférée au prochain point déterminé. Après avoir installé l'antenne sur le point actuel (n'importe lequel après le premier), les informations sont accumulées en 2-3 minutes. Ensuite et jusqu'à la fin de la séance de prise de vue, les étapes ci-dessus sont répétées. La capacité de mémoire du récepteur est conçue pour 5 à 20 heures de prise de vue en continu. La méthode est très pratique et efficace pour une utilisation dans les travaux cadastraux (par exemple, contournage ou marquage de petites zones). La principale exigence pour la prise de vue est la continuité obligatoire de la réception des signaux d'au moins 4 satellites lors du déplacement entre les points (c'est-à-dire qu'une zone assez ouverte est requise). La performance moyenne de cette méthode est difficile à déterminer. Il est possible de coordonner 100 points ou plus par jour, selon la zone de tournage, les moyens de transport, les conditions extérieures et l'expérience du personnel. Les résultats les plus favorables sont obtenus à une distance de la station de base à des distances allant jusqu'à 20 kilomètres. Méthode "Cinématique continue" (Cinématique continue). Les réglages initiaux de l'équipement sont similaires au type précédent de levé cinématique. La différence réside dans le fait que les observations dans ce cas sont effectuées sans s'arrêter aux points déterminés. À la suite du post-traitement, un catalogue de coordonnées de points est créé correspondant à chaque instant d'enregistrement des mesures dans la mémoire du récepteur (l'intervalle d'enregistrement peut varier de 0,5 seconde à plusieurs minutes, selon la dynamique du levé). Ce type de prise de vue est pratique à utiliser à la fois sur un objet en mouvement et à pied pour un contour détaillé des zones. Cette méthode peut également être utilisée pour lier les centres d'image en photographie aérienne. Dans ce cas, l'un des récepteurs est installé sur avion et se connecte à l'enregistreur à obturateur de caméra aérienne pour synchroniser leur fonctionnement, tandis que l'autre est utilisé comme station de base au sol. En conséquence, il est possible d'obtenir un catalogue des coordonnées des centres photographiques. La principale exigence pour ce type d'enquête est la continuité obligatoire de la réception des signaux d'au moins 4 satellites (c'est-à-dire qu'une zone assez dégagée est requise). La productivité du travail avec ce type de prise de vue n'est le plus souvent limitée que par la capacité de mémoire du récepteur et la capacité des batteries. Méthode "Real-Time Kinematic" (prise de vue cinématique en temps réel). C'est la méthode la plus moderne et la plus prometteuse pour effectuer des observations cinématiques. Un modem radio est ajouté au matériel, à l'aide duquel des corrections différentielles sont transmises de la station de base au récepteur portable. Dans le même temps, les coordonnées des points déterminés sont reflétées sur l'écran du récepteur portable avec une précision centimétrique en temps réel, c'est-à-dire aucun post-traitement requis. Cette méthode effectivement applicable à des distances de 10 à 15 kilomètres de la station de base et dépend, en règle générale, de la zone de réception fiable des signaux de correction différentiels. Tir pseudostatique (pseudo-cinématique). Les procédures pseudo-statiques peuvent être considérées comme une version abrégée de la méthode statique, ou comme un levé cinématique qui nécessite le repositionnement de l'antenne au-dessus du même point. La partie terrain du relevé pseudo-statique est réalisée de la même manière que dans le cas de la "cinématique". Cependant, la différence avantageuse est l'absence de nécessité d'un suivi continu d'au moins 4 satellites lors du déplacement entre les points déterminés. La seule exigence en cas de pseudo-statique est que le bodypack doit retourner à chaque station au moins deux fois, avec un intervalle de temps compris entre 1 et 4 heures. Le temps d'observation à chaque point est de 5 à 10 minutes, en fonction de la distance à la station de base et du nombre de satellites suivis. La productivité réelle est de 15 à 25 points par jour. Lors de la réalisation de tous types d'enquêtes, il est possible de : surveiller la qualité des satellites de poursuite ; contrôle du nombre de satellites visibles; contrôle actuel de la mémoire du récepteur et de son alimentation; planifier la prochaine séance de prise de vue ; entrer des notes de terrain à partir du clavier du récepteur ou du contrôleur dans la mémoire interne ou sur des cartes magnétiques ; changer les noms des stations et les hauteurs d'antenne ; Introduction des données météo pour les prendre en compte lors du post-traitement, etc.
À la suite de la description des méthodes de conduite des travaux sur le terrain à l'aide de récepteurs GPS, le tableau 1.1 montre les paramètres de précision estimés (déclarés par les fabricants) pour divers types tournage.
Tableau 1.1
Spécifications pour certains récepteursGPSutilisé en Russie.
| Caractéristiques | Nom des appareils, société, pays d'origine |
|||||
| (La France) | (Allemagne) | Arpenteur géodésique | (La Suisse) |
|||
| 1. Précision de mesure en mode statique |
||||||
| Incrément de coordonnées RMS (mm) | ||||||
| distances (mm) | ||||||
| Ecart type de détermination des dépassements (mm) | ||||||
| 2. Récepteur |
||||||
| Phase L1, code C/A/P Phase L2, code P Nombre de canaux parallèles Logiciel Dimensions (LxlxH), (mm) poids (kg) Humidité (%) Type de port de communication Puissance (V) Consommation d'énergie | ||||||
| 3. Antenne |
||||||
| Antenne intégrée Antenne déportée | - | - | - | - | + | |
| poids (kg) | ||||||
| 4. Ordinateur spécialisé (contrôleur) |
||||||
| La présence d'un contrôleur Tension requise (V) Dimensions (LxlxH) Température de fonctionnement (С°) | ||||||
| 5. Coût estimatif d'un ensemble de travail de 2 récepteurs USD |
||||||
Post-traitement Après avoir terminé la partie terrain du travail, il est nécessaire de « copier » les informations du récepteur vers l'ordinateur afin de calculer les lignes de base mesurées, ainsi que de résoudre un certain nombre de tâches, telles que la transformation des coordonnées ou immeuble modèle mathématique terrain. L'opération de rechargement des informations est effectuée à l'aide d'un programme spécial inclus dans le progiciel standard. Pour ce faire, vous pouvez utiliser même le plus simple Ordinateur personnel(jusqu'à PC avec processeur 086). Le logiciel dispose d'une interface "conviviale", de sorte que le travail de l'opérateur est réduit à l'exécution séquentielle d'actions demandées par l'ordinateur. Le post-traitement des fichiers de données (automatique et manuel) implique l'exécution séquentielle par le processeur d'un certain nombre d'algorithmes mathématiques complexes liés à la solution d'un système d'équations non linéaires. La complexité de mise en oeuvre de tels algorithmes est liée à la résolution de l'ambiguïté de la phase mesurée des fréquences porteuses, ainsi qu'à la nécessité de construire des modèles de retard ionosphérique et troposphérique des signaux satellites. Le résultat du fonctionnement de ces algorithmes est la détermination des composants du vecteur de base (incréments de coordonnées entre les points) dans le système de coordonnées global géocentrique WGS-84 avec les caractéristiques statiques et de précision associées à la fois des mesures réelles et du traitement ultérieur, qui sont nécessaires au processus d'ajustement. Ainsi, la technique d'arpentage avec des récepteurs géodésiques GPS est simple et efficace. À l'aide d'un équipement GPS, un géomètre peut indépendamment un bref délais effectuer l'ensemble des travaux géodésiques, de la rédaction d'un projet à l'obtention d'un catalogue de coordonnées ajusté ou d'une carte topographique de la région. Cependant, tous ces avantages ne semblent pas si évidents dans le contexte du coût élevé d'un ensemble complet de matériel et de logiciels. Pour une véritable évaluation de l'efficacité des appareils, il est nécessaire de comparer leur utilisation sur une certaine gamme commune dans la résolution de problèmes similaires. 1.3 Instruments utilisés Le choix des méthodes de déterminations et des équipements est déterminé principalement par la nature du relief ; les conditions fixées par le client et les possibilités financières. Pour mettre en œuvre le schéma établi pour créer une justification géodésique pour l'inventaire des terres sur le site et les travaux de construction ultérieurs, un équipement de navigation par satellite de Trimble 4600LS Surveyor a été utilisé. Ci-dessous ses principales caractéristiques. Géomètre 4600LS Géomètre GPS économique et entièrement intégré. Un outil facile à utiliser et performant pour créer des réseaux de référence, effectuer des levés topographiques et collecter des données pour le SIG. A la capacité de travailler en temps réel. Le 4600LS Surveyor™ est un outil d'arpentage GPS à faible coût et hautes performances pour la construction de réseaux de référence et l'arpentage - même en temps réel. L'appareil ne nécessite pas de ligne de mire entre les points et est capable de fonctionner jour et nuit par tous les temps. Le récepteur 4600LS peut être utilisé efficacement pour des levés GPS statiques et statiques rapides (L1 FasStatic) sur des lignes de base courtes et moyennes. Le 4600LS Surveyor est petit et facile à manipuler. Le récepteur GPS, l'antenne et les batteries sont combinés en une seule unité pesant seulement 1,7 kg. Le 4600LS ne nécessite pas d'alimentations externes ni de câbles de connexion supplémentaires. La présence d'une seule touche de commande et de trois indicateurs LED facilite le contrôle du processus de prise de vue. 4600LS - fonctionne avec des piles C (343 cellules). Lors de la prise de vue avec post-traitement, un jeu de piles dure 4 jours de travail. Lors de la création de réseaux de référence, le récepteur 4600LS est monté sur un trépied et allumé d'une simple pression sur un bouton. Pour une topographie efficace, le 4600LS est monté sur poteau et contrôlé avec un contrôleur TSCI portable en option. Les données collectées sur le terrain sont téléchargées via le port série, qui est également utilisé pour connecter le contrôleur. Le contrôleur est utilisé pour définir les paramètres du récepteur et entrer des informations sur les points. Le récepteur 4600LS est conçu pour une utilisation dans des conditions de terrain extrêmes. Il fonctionne dans la plage de température de -40°C à +65°C, est complètement étanche et ne coule pas dans l'eau. Les résultats de l'enquête peuvent être stockés dans la mémoire interne du récepteur ou du contrôleur. Pour garantir une précision et des performances élevées, le 4600LS fournit des mesures de phase porteuse et de code C/A de haute qualité à la fréquence LI pour les relevés statiques, à fréquence unique LI Fast Static et en temps réel. Le 4600LS Surveyor peut stocker plus de 64 heures de données de mesure en mode de relevé statique rapide. Le format de données est compatible avec d'autres récepteurs GPS Trimble. Lorsqu'il est utilisé conjointement avec le logiciel de post-traitement GPSurvey TM hautement efficace de Trimble, la création de réseaux géodésiques de référence peut être effectuée avec une précision inférieure au centimètre au cours de courtes sessions d'observation. Lorsqu'il fonctionne en temps réel (DGPS) via le deuxième port série, le 4600LS reçoit des corrections différentielles au format RTCM, ce qui vous permet de recevoir des positions en temps réel avec une erreur inférieure à 1 mètre. Il est possible de mettre à niveau le 4600LS pour effectuer des levés en temps réel (RTK), qui fournissent une précision centimétrique des coordonnées directement au moment des observations sur le site. Pour une précision inférieure au mètre dans les applications topographiques, le 4600LS s'associe au logiciel Asset Surveyor™ et à la série de produits Pathfinder de Trimble. Dans ce cas, il peut être utilisé pour créer des réseaux de haute précision. Le récepteur 4600LS Surveyor de Trimble - le plus grand fabricant de produits GPS au monde - est le premier récepteur GPS géodésique combiné qui associe véritablement qualité et facilité d'utilisation à des performances élevées à des prix abordable.
Caractéristiques:
Physique : Dimensions : 22,1 cm (diamètre) x 11,8 cm (hauteur) Poids : 1,4 kg sans piles ; 1,7 kg avec piles classe C Mémoire intégrée : 1 Mo Electrique : Alimentation : consommation électrique inférieure à 1 watt 5V DC. courant de 4 batteries de classe C (343 cellules); 9-20V CC courant provenant de sources d'alimentation externes. Piles : plus de 32 heures de fonctionnement avec 4 piles alcalines de classe C (à température nominale). Indicateurs d'état : Trois indicateurs LED : alimentation, acquisition de données et poursuite par satellite. Marche/Arrêt : Un bouton marche/démarre la prise de vue. Antenne : microruban, associée au récepteur. Interface : deux ports RS232 pour connecter un contrôleur / périphérique de stockage ou un modem radio (taux de transfert de données jusqu'à 38400 bauds).
Des conditions de fonctionnement:
Température : fonctionnement : de -40 °С à +65 °С stockage : de -55 °С à +75 °С Humidité : 100 %, complètement étanche, ne coule pas dans l'eau. Résistance aux chocs : Résiste à une chute de 2 mètres. Réalisation d'un levé statique : Modes : Quick-Start Static LI FastStatic Précision : Horizontale : 5 mm + 1 mm/km (à la longueur de ligne<10 км) 5 мм + 2 мм/км (при длине линии >10 km) Altitude : 10 mm + 2 mm/km Azimut : 1" + 5"/km Il est supposé que sur tous les sites, un minimum de 5 satellites sont suivis en continu conformément à la technique recommandée pour effectuer des levés statiques à fréquence unique. La précision du relevé en mode LIFastStatic est fonction de la durée de la session de mesure et des conditions d'observation aux stations. 1.4 Logiciel de réglage de réseau géodésique TRMNET Plus™ Il est désormais possible de combiner les procédures de réglage en utilisant à la fois les mesures OP8 et conventionnelles (optiques), ainsi que les hauteurs orthométriques. Tout cela vous permet de faire une version étendue du logiciel de réglage de réseau universel, qui a été développé par Trimble. Avec le logiciel TRIMNET Plus, vous pouvez traiter conjointement des mesures GPS, des mesures traditionnelles, y compris des observations de valeurs angulaires, de dénivelé afin d'effectuer le réglage final du réseau ou un réglage séparé, en utilisant séparément chacun des types de mesures donnés. En conséquence, vous recevrez des procédures d'ajustement de réseau séparées ou combinées pour la hauteur orthométrique et la hauteur au-dessus de l'ellipsoïde. De plus, l'utilisation du logiciel TRIMNET Plus vous permet de configurer plusieurs réseaux en même temps. Analyse à la fois GPS et traditionnelle mesures optiques , ainsi que le calcul automatique des coordonnées, sont rendus plus rapides et plus faciles grâce au logiciel TRIMNET Plus. Lors du calcul de réseaux, vous pouvez utiliser diverses combinaisons de systèmes de coordonnées (projections ECEF cartésiennes, ellipsoïdales et planifiées). De plus, l'utilisateur peut définir son propre système de référence. En combinant les mesures GPS, le modèle de géoïde et les données de levé conventionnel, le logiciel TRIMNET Plus effectue des ajustements de hauteur orthométriques à la précision des erreurs signalées. Cela donne à l'utilisateur le moyen le plus précis de déterminer les valeurs d'altitude à l'aide du GPS. Si vous décidez de ne pas utiliser de modèle de géoïde, en combinant les mesures traditionnelles et GPS, vous obtiendrez des estimations de la différence entre le géoïde et le modèle que vous avez choisi. Avec le logiciel TRIMNET Plus, vous pouvez égaliser les mesures de station traditionnelles en fournissant une entrée de données brutes à partir du clavier ou à partir de fichiers stockés sur le périphérique de stockage de données. Ainsi, après avoir résolu un certain nombre de tâches (de la planification initiale des travaux à l'organisation d'une base de données) à l'aide du progiciel universel TRIMVEC Plus, vous pouvez construire et finaliser votre réseau en utilisant TRIMNET Plus et en combinant le GPS et les mesures traditionnelles, ainsi qu'un modèle de géoïde. Caractéristiques. Le logiciel TRIMNET Plus est : Un outil efficace et facile à utiliser qui possède toutes les fonctionnalités dont vous avez besoin pour effectuer une procédure d'ajustement de réseau géodésique ; Géré par un système de menus, le logiciel produit des informations présentées sous forme graphique ; Produit une lecture automatique et directe des fichiers de sortie traités avec TRIMVEC Plus ; Fournit trois modes de réglage du réseau - pour les données obtenues à l'aide de mesures GPS, de mesures traditionnelles et de mesures combinées ; Fournit un mécanisme de lecture des fichiers chargés dans le lecteur de données lors des enquêtes traditionnelles et présentés au format DCO ; Lit et utilise les fichiers Geoid 90 et Geoid 91 pour effectuer les procédures d'ajustement les plus précises; Fournit à l'utilisateur la possibilité d'entrer des coordonnées géodésiques, planes d'état et locales définies par l'utilisateur pendant le processus d'ajustement, ainsi que de déterminer le système de coordonnées de sortie le plus pratique ; Unités linéaires définies par l'utilisateur, y compris le mètre, le pied d'arpentage américain, le pied international et d'autres unités personnalisées ; Les données de sortie vont directement au traceur, permettant la formation d'une image de réseau avec des ellipses d'erreur superposées pour chaque station ; Représentation des informations de sortie dans un système de coordonnées planes : distance sur un plan, angle directionnel, facteur d'échelle, etc. ; Représentation des informations de sortie dans le système de coordonnées géodésiques : distance géodésique, azimut géodésique, différence entre hauteurs ellipsoïdales et orthométriques ; Mise en place de grands réseaux géodésiques, constitués de plus de 32 000 points ; La capacité de transformation vous permet de déterminer le décalage du système de référence local lors du passage d'un projet à l'autre, ou de déterminer le système de référence local, dans lequel l'ajustement a déjà été effectué. GPSurvey ™ 2.0 Dans certains cas, lorsque la zone d'étude est importante, une autre option logicielle est utilisée. Logiciel de relevé GPS qui fonctionne dans Environnement Windows . GPSurvey est le logiciel de post-traitement et de gestion de projet d'enquête le plus populaire au monde. GPSurvey 2.0 vous permet d'effectuer toute une gamme de tâches : planifier une enquête GPS ; télécharger des données à partir de récepteurs géodésiques Trimble, de contrôleurs géodésiques TDC1 et d'autres dispositifs de stockage de données ; traiter les données GPS monofréquence ou bifréquence obtenues à la suite de la réalisation de levés statiques rapides ; visualiser et analyser les résultats ; effectuer un ajustement approfondi du réseau ; exporter les coordonnées ajustées ; Compiler des rapports de projet généralement acceptés. Le module d'ajustement du réseau TRIMNET Plus permet un co-ajustement des mesures géodésiques traditionnelles et des données GPS, y compris les données post-traitées ou en temps réel. [ 5 ] Au cœur de GPSurvey se trouve WAVE, le processeur de base. Il ouvre la possibilité aux utilisateurs d'augmenter considérablement la productivité sur le terrain. Premièrement, le processeur WAVE est capable de produire des résultats fiables pour de longues lignes de base et pour diverses conditions de pip. Deuxièmement, les géomètres sur le terrain ont une totale liberté d'action, car WAVE traite ensemble et automatiquement tous les types de données GPS - les résultats des relevés statiques rapides. Conçu par des géomètres et développé par des programmeurs professionnels, GPSurvey est facile à utiliser. Il dispose d'une interface utilisateur graphique Microsoft Windows, d'un fonctionnement intuitif et d'un ensemble de paramètres par défaut soigneusement conçu. Avoir une base de données unique et des modules entièrement intégrés facilite le basculement entre différentes tâches. Pour l'utilisateur avancé, GPSurvey offre une large gamme d'options de contrôle. GPSurvey 2.0 est livré en standard avec un module d'importation et d'exportation de données au format RINEX. Les rapports de projet peuvent être générés dans des formats ASC11 prédéfinis, dans des formats ASC11 définis par l'utilisateur et au format DXF. Un utilitaire de transformation de coordonnées supplémentaire permet d'effectuer la transformation indépendamment de l'ajustement du réseau. GPSurvey est disponible dans diverses configurations. Les progiciels de traitement de données mono ou bi-fréquence sont livrés avec une ou deux licences. La version en temps réel de GPSurvey permet le chargement, la visualisation et l'ajustement des données d'enquête en temps réel. De plus, les composants GPSurvey peuvent être expédiés séparément. Le module GPSurvey Manager permet la planification, le chargement des données, la navigation sur le réseau et les transformations de coordonnées. Les options de traitement de base gèrent le traitement des levés statiques à fréquence unique (L1), des levés statiques rapides à double fréquence (L1/L2) et des levés cinématiques initialisés par OTP. Le module TRIMNET Plus, fourni en tant que programme de réglage du réseau, peut également être fourni séparément en plus du GPSurvey Manager. Le logiciel GPSurvey est développé par Trimble, le plus grand fabricant mondial d'équipements d'arpentage GPS et un expert de premier plan dans les applications d'arpentage GPS. Caractéristiques générales. Le logiciel de post-traitement des données GPS et de gestion de projet d'enquête se compose de modules qui s'exécutent sur des ordinateurs personnels compatibles IBM dans l'environnement d'exploitation Windows et permettent : La planification du travail ; Téléchargement et transfert de données ; Traitement des résultats d'observation ; Ajustement du réseau ; Analyse graphique des données et résultats de traitement ; Préparation des rapports de projet ; Coordonner les transformations et l'exportation des données. Configuration informatique requise : PC compatible IBM avec processeur Intel Pentium (recommandé) processeur Intel Pentium II ou ultérieur), coprocesseur mathématique, 128 Mo de RAM (minimum), 20 Mo d'espace disque libre pour l'installation d'OP8.EXE, souris compatible Windows, Versions Windows 98 ou supérieur, DOS version 6.22 ou supérieur. Interface utilisateur : Icônes graphiques ; Gestion au moyen du manipulateur "souris" ; Système de menu déroulant ; Base de données de projet partagée disponible pour n'importe quel module ; Système d'aide en ligne complet; Système intégré Informations d'arrière-plan; Options de traitement définies par l'utilisateur, y compris la sélection des satellites à utiliser, les masques d'élévation, les heures de début et de fin d'observation et les limites de rejet.
2. AUGMENTER LA PRÉCISION DE LA RECONNAISSANCE DES RECONNAISSANCES
Des méthodes combinées sont actuellement utilisées en géodésie et en photographie aérienne pour lier les marques d'identification. En présence d'équipements satellitaires, lorsque le nombre de marques d'identification est de 50 ou plus, il est alors plus rentable tant d'un point de vue économique qu'en termes de précision d'effectuer leur liaison à l'aide d'équipements satellitaires, et cela peut être fait même avec récepteurs monofréquence. Les Opoznaki sont préparés pour la photographie aérienne ultérieure; en règle générale, la photographie aérienne est réalisée sur une vaste zone de 50 hectares ou plus. Le coût de la pose de marqueurs et de l'exécution d'une référence géodésique sera moins cher et plus rentable lorsqu'il y en aura plus. Si les conditions du terrain filmable depuis un avion ne permettent pas l'utilisation efficace des équipements satellitaires, alors dans ces cas il est conseillé d'utiliser la méthode classique des repères d'identification contraignants, bien que la précision puisse être moindre en fonction de la distance . La précision de la reliure des marques d'identification doit être supérieure à 5-10 cm. Déplacements théodolites ou polygonométriques avec une distance de 5-7 km. la longueur peut fournir la précision spécifiée, mais elles doivent être effectuées dans les sens avant et arrière, et après le travail sur le terrain, il est nécessaire de niveler pour obtenir un catalogue de coordonnées, qui sera nécessaire lors du traitement des matériaux de levé aérien à une certaine échelle. De nos jours, la méthode classique peut être liée très efficacement avec stations totales électroniques, ce qui augmente considérablement la précision et la productivité du travail lors de l'exécution de travaux sur le terrain dans une zone boisée fermée. C'est à l'aide d'une station totale électronique ou de méthodes classiques qu'il est possible de lier des marques d'identification avec une plus grande précision afin d'obtenir une fourniture plus précise des coordonnées de la zone faisant l'objet de photographie aérienne. Pour améliorer la précision des identifications, il convient d'être guidé et approprié d'utiliser à la fois des équipements satellitaires et des équipements géodésiques conventionnels, mais avec l'utilisation de tachéomètres électroniques, qui, en termes de précision de détermination, seront équivalents pour déterminer les coordonnées des technologies satellitaires . Étant donné que des équipements à fréquence unique peuvent être utilisés lors de la fixation de marques d'identification, le coût des travaux sera de 20 à 30% moins cher et, en termes de précision, il répondra aux exigences réglementaires. Il est à noter que les marques d'identification qui seront apposées par satellite ou méthode classique au sol doivent être marquées de manière à ce qu'elles soient bien déchiffrées dans l'image. Pour ce faire, lors des reconnaissances et de la pose, les marques d'identification doivent être choisies de manière à ce que tous les points de contour naturels (angles de clôtures, fossés, ouvrages d'irrigation, etc.) Dans le cas d'un traitement automatisé des données photogrammétriques, il s'agisse de données satellitaires pour déterminer les coordonnées des marques d'identification qui permettront de les relier et le logiciel MAPINFO peut améliorer leur précision. 2.1 Détermination des coordonnées des marques d'identification Pour déterminer les coordonnées géodésiques des marques d'identification, des méthodes géodésiques analytiques sont utilisées. Les coordonnées planifiées des points sont déterminées par GPS ou analytiquement par triangulation, polygonométrie, trilatération, divers empattements (angulaire, linéaire et azimut), combinés à la mesure des distances avec un télémètre et à la détermination des azimuts astronomiques (gyroscopiques). Ils peuvent être déterminés par résection en azimut réciproque à deux ou trois points de départ. Le RMS de l'azimut astronomique n'est pas supérieur à 15 ". Ils sont également déterminés de manière combinée avec la mesure des distances avec un télémètre et la détermination des azimuts astronomiques, par exemple, ils construisent des liaisons linéaires-azimutales ou déterminent la résection linéaire inverse à un départ point avec la mesure de l'azimut au point à déterminer.Le nombre de marques d'identification et leur emplacement dépendent de la méthode d'épaississement photogrammétrique appliquée et de l'échelle de la carte.Ils doivent être calculés lors de l'élaboration d'un projet de préparation d'images sur le terrain en utilisant des formules qui caractérisent l'accumulation d'erreurs dans les réseaux photogrammétriques.Le nombre de points sur le parcours doit être au minimum de 6. ) sur les images.De plus, pour chaque identification, un contour est établi indiquant sa position par rapport aux contours les plus proches Les points PP servent de base à l'épaississement photogrammétrique du réseau de points pour la prise de vue avec le CFS. définitions togrammétriques, à savoir avec RMS hsec 10 = 0,25 m. Ensuite, ses erreurs n'affecteront pas la précision des courbes de niveau. La préparation planifiée des images sur le terrain doit être effectuée plus précisément que les déterminations photogrammétriques, à savoir avec les géodes RMSd. = RSD phot. = 0,1 mm sur l'échelle du dessin. Ensuite, les erreurs dans les définitions géodésiques n'affecteront pas la précision de l'épaississement photogrammétrique. Opoznak est un point de contour bien identifié sur une photographie aérienne et au sol, dont les coordonnées sont déterminées par des méthodes géodésiques. Exigences générales pour l'emplacement des points justification du tournage , ainsi que les mises en page ont été présentées plus tôt. Des points caractéristiques de la zone, des contours nets, dont on peut être sûr de l'immobilité et de la durabilité (angle de la clôture, poteaux électriques, dalles en béton armé, etc.) ont servi de repères. En l'absence de contours clairs, les marques d'identification étaient : arbres debout séparément, buissons. Si possible, les marques d'identification ont été choisies avec la plus faible hauteur au-dessus du sol (en raison de l'erreur de projection du centre de phase de l'antenne), dans une zone dégagée et plus proche des routes. L'emplacement choisi de la marque d'identification est appliqué sur des photographies aériennes d'un tirage agrandi à l'échelle 1:2000 par piquage (précision de piquage 0,1 mm). Chaque identification s'est vue attribuer un numéro de série de manière à ce qu'il n'y ait pas de signes avec les mêmes numéros sur l'objet. Les antennes réceptrices ont été centrées à l'aide d'un plomb optique monté dans une embase (des tribragers de Trimble USA ont été utilisés) avec une précision d'environ 1 mm. La mesure de la hauteur de l'antenne au-dessus du centre de la station a été effectuée avec une tige pliante avec une précision de 1 mm deux fois - avant et après la fin de la session d'observation. L'orientation de l'antenne vers le nord n'était pas nécessaire en raison de ses caractéristiques de conception. Chaque opérateur à chaque tour du récepteur à chaque point doit remplir son carnet de terrain, dont chaque page était un formulaire d'un certain formulaire. Ce formulaire indique : - le nom du projet de travail ; - espace de travail; - date des observations, - type d'observations ; - début et fin des observations ; - le nom du point ; - hauteur du centre de phase de l'antenne avant et après la fin de la séance d'observation ; - numéro d'appareil. Le formulaire se terminait par la signature de l'observateur, ainsi que la signature de la personne qui a vérifié les dossiers. Chaque récepteur était équipé de contrôleurs de terrain, grâce auxquels l'opérateur pouvait observer directement le processus de mesure et la charge de la batterie. La double mesure de hauteur a été effectuée principalement à des fins de contrôle, mais elle a parfois permis de détecter des changements de hauteur d'antenne lorsque des mesures ont été prises dans des zones humides. Avec des distances entre les points de plusieurs dizaines de kilomètres, le temps d'observation, qui fournit une précision centimétrique pour déterminer la position relative, sur la base de données expérimentales, est de 4 à 6 heures. Cependant, en raison du fait que l'heure d'approche et d'approche des points depuis la base de l'équipe sur le terrain et, par conséquent, l'heure du début des observations différaient considérablement, et également en raison de la présence d'un nombre limité de véhicules , organiser l'allumage et l'extinction simultanés des récepteurs en tous les points observés alors que le maintien d'une durée suffisante de la séance n'était pas possible. Il a donc fallu procéder de la manière suivante : l'heure d'arrivée à chaque point et la procédure la plus rationnelle d'approche des points ont été estimées à l'avance, en tenant compte du nombre de personnes impliquées, de voitures et de la localisation des points par rapport à la réseau routier; en règle générale, 6 heures s'ajoutaient à l'heure de mise sous tension du dernier récepteur, période offrant une précision suffisante à des distances de plusieurs dizaines de kilomètres, plus une marge pour les retards imprévus (30 minutes). Tout d'abord, les opérateurs équipés de récepteurs étaient livrés par la route aux points les plus reculés et les plus difficiles, puis aux plus facilement accessibles. Tous les récepteurs ont été allumés au bon moment lorsqu'ils sont arrivés au point et éteints simultanément au moment calculé de l'extinction du dernier récepteur allumé. Ainsi, entre les huit récepteurs, il y avait des chevauchements temporels d'au moins 6 heures, tandis que la durée des observations et, par conséquent, les chevauchements entre certains récepteurs étaient de 8 heures ou plus. Lors des observations aux points des réseaux de concentration, l'installation des récepteurs a été réalisée selon la méthode suivante : centrage, mesure de hauteur, fixation des instants de début et de fin d'observations, remplissage du carnet de terrain. La durée des séances d'observation était également d'environ 6 heures. Lors de la détermination des points de la justification de l'enquête, nous avons essayé d'utiliser au moins un point du GHS et au moins deux points des réseaux de concentration, cela a permis de contrôler lors du traitement des mesures. Le temps d'observation aux points dépendait de nombreux facteurs, ce sont : - le nombre de satellites observés ; - géométrie de l'entaille spatiale PDOP ; - distance du point à la station de base ; - qualité de réception du signal. Le temps approximatif consacré aux mesures était de 40 à 60 minutes, mais à plusieurs endroits, il a été nécessaire d'effectuer des relevés GPS pendant 2 à 2,5 heures. Lors du travail avec le récepteur, toutes les séances d'observation ont été effectuées en mode statique avec les paramètres suivants : - masque angulaire (angle de coupure) - 15° ; - discrétion d'enregistrement des mesures de phase - 15 sec. ; - Limite PDOP - 8.0. Lors des mesures, des photographies aériennes à l'échelle 1: 2000 sont dressées sur la face avant, l'endroit de la perforation d'identification est encerclé de deux cercles de rayons différents, et le numéro d'identification est signé. Au verso de l'image, ils encerclent le lieu de l'injection de la même manière, signent son numéro, donnent une description de la marque d'identification, la hauteur au-dessus du sol, dessinent un contour, mettent le numéro et la signature de l'opérateur. L'exactitude de la piqûre et de la conception est vérifiée "dans la seconde main", après avoir vérifié la date et la signature de l'inspecteur. 2.2 Analyse du traitement informatique des déterminations satellitairesÀ la suite du traitement informatique des déterminations par satellite des coordonnées des marques d'identification dans la thèse, des marques d'identification 20 ont été obtenues.Les données obtenues, après traitement informatique, sont à quelques centimètres près, ce qui confirme la grande précision des coordonnées du marques d'identification même dans des conditions de travail géodésique défavorables, dans lesquelles il est assez difficile de lier les marques d'identification. Le logiciel MAPINFO permet d'automatiser le traitement des données photogrammétriques, permet d'améliorer la précision des coordonnées de l'image grâce à une grande précision (coordonnées ou repères de référence), comme pour la partie verticale, puis équipement satellite permet d'émettre simultanément des informations, aussi bien en plan qu'en hauteur. Il convient de noter que la composante hauteur dans la détermination des marques d'identification peut être liée à système unifié coordonne avec une précision pas plus grossière que quelques centimètres, ce qui est très important lors de la création de la composante haute altitude de l'image.
3. VOLET TECHNIQUE ET ECONOMIQUE DE LA THESE
3.1 Calcul du coût des travaux pour la méthode traditionnelle et GPS
Pour évaluer l'efficacité économique de la méthode GPS, par rapport à la méthode traditionnelle, nous supposerons que ces travaux nécessitent des spécialistes de même niveau de compétence (d'un point de vue économique, recevant le même les salaires). De plus, en tenant compte du coût de l'équipement utilisé et du temps consacré au travail, il est possible de déterminer l'efficacité économique et les économies de coûts lors de l'utilisation d'un équipement GPS par un simple calcul (estimé) pour l'ensemble des travaux pour chaque méthode. . Selon la méthodologie standard, un indicateur de l'efficacité économique comparée des investissements en capital est le minimum de coûts réduits 3 :
3 = C + EnK = min, (3.1)
Où K - investissements en capital pour chaque option ; C - coût pour la même option ; En est le coefficient normatif d'efficacité comparative (pour les travaux topographiques et géodésiques = 0,15). La différence de coûts selon la méthode traditionnelle Ztrad et la méthode GPS Zgps exprimera la taille de l'effet économique E :
E \u003d Ztrad - Zgps, (3.2)
Et en tenant compte de la formule (3.1) :
E \u003d (Strad + EnKtrad) - (Cgps + EnKgps), (3.3)
Egod \u003d ((Strad + EnKtr ud) - (Cgps + EnKgps ud))Agod gps
C - coût unitaire des travaux
Le prix de revient (C) de la réalisation des ouvrages se décompose en frais fixes (OR), frais généraux (NR) et frais d'organisation et de liquidation (OLR).
C \u003d OU + NR + FLR (3.4)
Les principaux coûts sont constitués principalement des frais généraux de personnel (TWPC) des entrepreneurs, des amortissements : matériel (AO) et des frais de transport (TR).
OU \u003d ORZP + AR + TP (3.5)
Pour calculer les coûts salariaux totaux (ARZP) des exécutants, il faut multiplier le salaire journalier moyen (ADW) de l'entrepreneur par le nombre total de journées de travail (ARWP) consacrées à la production de l'œuvre :
ORZP \u003d SDZP x OKCHD (3,6)
Lors de l'évaluation du salaire journalier moyen (ADZP), les salaires mensuels au taux (DWRP) ont été pris en compte par le ratio d'allocation totale, lié au nombre de jours de travail par mois :
SDZP \u003d 0,073 x ZPS (3,7)
Sans tenir compte du temps passé à la pose des points, nous calculerons les jours de travail utilisés pour la production de toute la gamme de travail, aussi bien avec la méthode traditionnelle qu'avec la méthode GPS. Le nombre total de jours-homme de travail (OKCHD) peut être divisé en jours consacrés au travail sur le terrain (NPW) et en jours consacrés au traitement des observations (PDO).
OKChD \u003d CHDPR + CHDON (3,8)
Selon des calculs effectués pour des travaux similaires par la méthode traditionnelle selon des normes de temps uniformes, le temps passé sur le terrain était de 2 jours pour la reconnaissance (nombre d'interprètes 2 personnes) et de 14 jours pour les mesures (nombre d'interprètes 4 personnes), par conséquent, les hommes-jours consacrés au travail sur le terrain peuvent être calculés à l'aide de la formule suivante :
NWPRtrad = 2 jours * 2 performers (reconnaissance) + 14 jours * 4 performers (mesures) = 4 h/j + 56 h/j = 60 h/j
De même, nous calculons les hommes-jours passés sur le terrain par la méthode GPS, selon la formule :
GPS NPR = 1 jour * 2 intervenants (reconnaissance) + 3 jours * 2 intervenants (observations) = 2 h/j + 6 h/j = 8 h/j
Ainsi, sept fois et demie moins de jours-homme ont été consacrés à l'exécution de travaux de terrain GPS. Traitement des observations :
CHDONtrad = 2 jours * 2 intervenants (planification) + 2 jours * 2 intervenants (organisation) + 10 jours * 2 intervenants (traitement des observations) + 4 jours * 1 intervenants (ajustement) = 4 h/j + 4 h/j + 20 h/j + 4 h/j = 36 h/j
GPS CHDON = 1 jour * 1 intervenant (planification) + 1 jour * 1 intervenant (traitement des observations) + 1 jour *1 intervenant (réglage) = 1 h/j +1 h/j +3 h/j + 1 h/j = 6h/j
Ainsi, pour des raisons organisationnelles et caméral travail GPS 7,3 fois moins de jours-hommes ont été dépensés. D'après la formule (3.8) :
OKCHDtrad \u003d 60 h/j + 36 h/j \u003d 96 h/j
GPS OKCHD = 8h/j + 6h/j – 14h/j
Par conséquent, en calculant les coûts salariaux totaux selon la formule (3.6), nous obtenons :
ORZPtrad \u003d 0,073 * ZPS * 96 h / j \u003d 7,008 * ZPS
GPS ARRP = 0,073 * ERP * 14 h/j = 1,02 * ERP
Si nous prenons le taux moyen d'un ingénieur géomètre d'un montant de 3000 roubles, le coût salarial total sera de:
ORZPtrad = 21024 roubles.
ORZP GPS = 3060 roubles.
Pour calculer les coûts d'amortissement des équipements usagés, supposons que tous les équipements sont neufs et que la période de récupération est de 36 mois (864 jours ouvrables). Ensuite, le taux d'amortissement journalier (DNAR) est le rapport du coût de l'équipement (CO) à sa période de récupération.
ADNR = CO/864 (3,9)
Étant donné que les instruments et les outils de traitement ont été utilisés à des intervalles de temps différents, nous les prendrons en compte séparément, puis la valeur des coûts d'amortissement totaux pour la période d'utilisation (PI) de l'équipement.
AR \u003d ADNR * PI (3.10)
Ainsi, les données initiales pour le calcul des coûts d'amortissement sont le coût total de l'équipement et la période d'utilisation. Coût de l'équipement 1 Tableau 3.1
| Méthode traditionnelle : |
||
| Pour les observations : | télémètre 2ST-10 | |
| Théodolite 2T2 | ||
| LE TOTAL | 65100 roubles. | |
| Emb. DNR | 75 roubles. | |
| Pour traitement: | progiciel | 8500 roubles. |
| Ordinateur personnel | 15000 roubles. | |
| LE TOTAL | 23500 roubles. | |
| DNR arr. | 27 roubles. | |
| Pour les observations : | kit récepteur 4600LS Surveyor | |
| TOTAL 365000 roubles. | ||
| Emb. DNR 422 roubles. | ||
| Pour traitement: | Logiciel Ordinateur personnel | 35000 roubles. 15000 roubles. |
| TOTAL 50000 roubles. |
||
| DNR arr. 57 roubles. | ||
ARTrad = 75 roubles. * 14 jours + 27 roubles. * 4 jours = 1158 roubles.
ARGPS = 422 roubles. * 3 jours + 57 roubles. * 1 jour = 1323 roubles.
Les coûts des véhicules comprennent les salaires des conducteurs et les taux d'utilisation des voitures (par heure de fonctionnement et par kilomètre parcouru). Ces coûts étaient en moyenne de 500 roubles par jour, donc en multipliant ce montant par la période d'utilisation des voitures, vous pouvez obtenir les frais de transport requis.
TRtrad = 500 roubles. * (2 jours (rec.) + 14 jours (changement)) = 8000 roubles.
TRGPS = 500 roubles. * (1 jour (rec.) + 3 jours (change)) = 2000 roubles.
ORtrad = 21024 roubles. + 1158 roubles. + 8000 roubles. = 30182 roubles.
OU GPS = 3060 roubles. + 1323 roubles. + 2000 roubles. = 6383 roubles.
Les frais généraux selon les normes s'élèvent à 56% du montant des frais de base, et les frais d'organisation et de liquidation s'élèvent à 30% du montant des frais de base et généraux. Ainsi, selon la formule (3.4), le coût est :
C = ((1 + 0,56) + 0,3 * (1 + 0,56)) * RR = 2,028 * RR (3,11)
Pour chaque méthode, ce montant est de :
Strad = 61209 roubles (sed.worker = 1667 roubles)
Сgps = 12945 roubles (sed.worker = 2499 roubles)
L'investissement en capital (K) représente le coût des fonds pour l'achat d'instruments et d'équipements. Investissement en capital Tableau 3.3
| Méthode traditionnelle : | ||
| Télémètre 2ST-10 Théodolite 2T2 Progiciel ULUSOrdinateur personnel | 56600 roubles. 8500 roubles. 8500 roubles. 15000 roubles. | |
| KtradComment | ||
| Méthode GPS : | ||
| Pour les observations : Pour le traitement : | Logiciel du kit de récepteur Surveyor 4600 LS Ordinateur personnel | 365000 roubles. |
Ztrad = 61209 roubles. + 0,15 * 88600 roubles. = 74499 roubles.
Zgps = 12945 roubles. + 0,15 * 415000 roubles. = 75195 roubles.
En utilisant la formule (3.3), nous calculons l'effet économique :
E \u003d 76730 roubles. - 88571 roubles. = - 696 roubles.
Egod = 253421 roubles
Sur la base de ce résultat, on peut résumer qu'il n'y a aucun avantage économique à travailler sur de petits objets, ce qui s'explique par un investissement important avec une petite quantité de travail. La valeur de l'effet économique obtenue nous permet de reconnaître que l'utilisation d'équipements GPS a un avantage économique tangible sur des objets de taille considérable. Il convient de noter que le site en question n'est qu'une partie intégrante d'arpentages plus étendus, conformément au plan du comité foncier de district, tant dans la région de Krasnogorsk qu'au-delà. A cet égard, des calculs d'évaluation ont été effectués, en cas d'augmentation du volume de travail, tant au niveau des indicateurs temporels que du nombre de points de justification géodésique. En tenant compte de la taille de l'objet à l'étude et du plan à long terme de travaux ultérieurs, le nombre de points requis par densité a été calculé. Les calculs correspondants et l'évaluation de l'efficacité économique ont été effectués lors de l'utilisation de la méthode GPS pour la mise en œuvre de l'ensemble du projet dans son ensemble. Avec un nombre total de points (environ 100) et un temps de mise en œuvre (quarante jours), le résultat a été obtenu Egps = 3,4 fois. De là découle la conclusion que pour obtenir un effet économique positif, il est nécessaire d'utiliser le plus intensivement possible les équipements GPS. Étant donné qu'actuellement, les plus grands volumes de travaux topographiques et géodésiques sont liés à l'inventaire des terres, on peut supposer que l'utilisation de systèmes satellitaires modernes dans la réalisation de ces travaux sera économiquement faisable et efficace. De plus, lors de l'utilisation de la technique GPS, une réduction significative du temps et des coûts matériels associés à la fois à la mesure et au traitement des informations reçues a été notée par rapport aux méthodes traditionnelles. Cela nous permet de conclure qu'il est opportun d'utiliser activement les récepteurs GPS non seulement pour la construction de réseaux géodésiques de référence de haute qualité, mais également dans la production d'ouvrages topographiques et géodésiques de classe inférieure, où l'effet de leur utilisation peut être considérablement plus élevé. . 3.3 Exigences hygiéniques pour l'organisation du travail Dispositions générales et champ d'application Les présentes règles et réglementations sanitaires et épidémiologiques de l'État (ci-après dénommées les règles sanitaires) ont été élaborées conformément à la loi fédérale «sur le bien-être sanitaire et épidémiologique de la population» du 30 mars 1999 n ° 52-FZ. (Recueil de la législation de la Fédération de Russie, 1999 g, n ° 14, art. 1650) et le règlement sur le rationnement sanitaire et épidémiologique de l'État, approuvé par décret du gouvernement de la Fédération de Russie du 24 juillet 2000 n ° 554 (recueilli Législation de la Fédération de Russie, 2000, n° 31, art. 3295). Les règles sanitaires sont valables dans toute la Fédération de Russie et établissent des exigences sanitaires et épidémiologiques pour les ordinateurs électroniques personnels (PC) et les conditions de travail. L'exigence de règles sanitaires vise à prévenir l'impact négatif sur la santé humaine des facteurs nocifs de l'environnement de production et du processus de travail lors du travail avec un PC. Ces règles sanitaires déterminent les exigences sanitaires et épidémiologiques : - pour la conception, la fabrication et l'exploitation des ordinateurs personnels domestiques ; - exploitation de PC importés utilisés dans la production, l'éducation, la vie quotidienne et les complexes de jeux (machines automatiques) basés sur des PC ; à la conception, la construction et la reconstruction de locaux destinés au fonctionnement de tous types de PC, d'équipements de production et de complexes de jeux (machines automatiques) à base de PC ; - à l'organisation des lieux de travail avec un PC, des équipements de production et des complexes de jeux (machines automatiques) basés sur un PC. Les exigences des règles sanitaires s'appliquent : - aux conditions et à l'organisation du travail avec un PC ; - sur les machines informatiques numériques électroniques personnelles, portables ; périphériques de systèmes informatiques (imprimantes, scanners, claviers, modems externes, dispositifs électriques de réseaux informatiques, dispositifs de stockage d'informations, blocs Alimentation sans interruption etc.), les dispositifs d'affichage d'informations (terminaux d'affichage vidéo (VDT) de tous types) et les complexes de jeux basés sur un PC. Les exigences des règles sanitaires ne s'appliquent pas à la conception, à la fabrication et à l'exploitation : - des téléviseurs domestiques et des consoles de jeux vidéo ; - des moyens d'affichage visuel des informations des microcontrôleurs intégrés dans les équipements technologiques ; - PC de véhicules ; - PC se déplaçant dans le processus de travail. La responsabilité de la mise en œuvre de ces règles sanitaires incombe aux personnes morales et aux entrepreneurs individuels engagés dans : - le développement, la production et l'exploitation d'ordinateurs personnels, d'équipements de production et de complexes de jeux basés sur un ordinateur personnel ; - conception, construction et reconstruction de locaux destinés à l'exploitation de PC dans les bâtiments publics industriels, administratifs, ainsi que dans les établissements d'enseignement, de culture et de divertissement. Les entrepreneurs individuels et les personnes morales en cours de production et d'exploitation de PC doivent exercer un contrôle de production sur le respect de ces règles sanitaires. Les lieux de travail utilisant un PC doivent respecter les exigences de ces règles sanitaires. Exigence pour un PC Un PC doit être conforme aux exigences de ces règles sanitaires, et chaque type est soumis à un examen sanitaire et épidémiologique avec une évaluation dans des laboratoires d'essais accrédités de la manière prescrite. La liste des produits et des paramètres hygiéniques contrôlés des facteurs nocifs et dangereux est présentée dans l'App. 3 (tableau 1). Niveaux de pression acoustique et niveaux sonores admissibles, créé par PC , ne doit pas dépasser les valeurs présentées dans App. 3 (tableau 2). Les niveaux temporaires admissibles de champs électromagnétiques (EMF) créés par le PC ne doivent pas dépasser les valeurs présentées dans l'application. 3 (tableau 3). Les paramètres visuels autorisés des dispositifs d'affichage d'informations sont présentés dans l'application. 3 (tableau 4). La concentration de substances nocives émises par le PC dans l'air intérieur ne doit pas dépasser les concentrations maximales admissibles (MAC) établies pour l'air atmosphérique. Le débit de dose d'exposition aux rayons X mous en tout point à une distance de 0,05 m de l'écran et du corps VRT (sur un tube à rayons cathodiques) à n'importe quelle position des dispositifs de réglage ne doit pas dépasser 1 μSv / h (100 µR/h). La conception du PC doit permettre de faire pivoter le corps dans un plan horizontal et vertical avec une fixation dans une position donnée pour assurer une observation frontale de l'écran VRT. La conception du PC doit permettre de peindre le boîtier dans des couleurs douces et apaisantes avec une diffusion diffuse de la lumière. Le boîtier du PC, le clavier et les autres blocs et périphériques du PC doivent avoir une surface mate avec un coefficient de réflexion de 0,4 à 0,6 et ne pas avoir de parties brillantes pouvant créer des reflets. La conception du VDP doit prévoir la régulation de la luminosité et du contraste. La documentation pour la conception, la fabrication et le fonctionnement d'un PC ne doit pas contredire les exigences de ces règles sanitaires. Exigences relatives aux locaux pour travailler avec un PC Les locaux pour faire fonctionner un PC doivent disposer d'un éclairage naturel et artificiel. Le fonctionnement d'un PC dans des pièces sans lumière naturelle n'est autorisé qu'avec une justification appropriée et la présence d'une conclusion sanitaire et épidémiologique positive émise de la manière prescrite. L'éclairage naturel et artificiel doit être conforme aux exigences de la documentation réglementaire en vigueur. Les fenêtres des pièces où sont utilisés des équipements informatiques doivent être principalement orientées vers le nord et le nord-est. Les ouvertures des fenêtres doivent être équipées de dispositifs réglables tels que: stores, rideaux, visières extérieures, etc. Il est interdit de placer des places d'utilisateurs de PC dans toutes les institutions éducatives et culturelles et de divertissement pour enfants et adolescents dans les sous-sols et sous-sols. La surface par poste de travail des utilisateurs d'un PC avec un VDT basé sur un tube à rayons cathodiques (CRT) doit être d'au moins 6 mètres carrés. , dans les locaux des institutions culturelles et de divertissement et avec VDT basé sur des écrans plats discrets (cristaux liquides, plasma) - 4,5 m². Lors de l'utilisation d'un PC avec un VDT basé sur CRT (sans périphériques auxiliaires - une imprimante, un scanner, etc.) qui répond aux exigences des normes internationales de sécurité informatique, avec un temps de fonctionnement inférieur à 4 heures par jour, une zone minimale de 4,5 mètres carrés sont autorisés. par poste utilisateur (adulte et étudiant) enseignement professionnel ). Pour la décoration intérieure de l'intérieur des locaux où se trouve le PC, des matériaux à réflexion diffuse avec un coefficient de réflexion pour le plafond de -0,7-0,8 doivent être utilisés; pour les murs -0,5-0,6 ; pour le sol -0,3-0,5. Les matériaux polymères sont utilisés pour la décoration intérieure des locaux avec un PC en présence d'une conclusion sanitaire et épidémiologique. Les locaux où se trouvent des postes de travail avec PC doivent être équipés d'une mise à la terre de protection (mise à zéro) conformément aux exigences techniques de fonctionnement. Vous ne devez pas placer les lieux de travail avec un PC à proximité de câbles et d'entrées d'alimentation, de transformateurs haute tension, d'équipements technologiques qui interfèrent avec le fonctionnement du PC. Exigences relatives au microclimat, à la teneur en ions de l'air et aux produits chimiques nocifs dans l'air sur les lieux de travail équipés d'un PC . Dans les locaux industriels où le travail sur PC est prédominant (salles de contrôle, salles d'opérateurs, salles de règlement, cabines et postes de contrôle, salles informatiques, etc.) et est associé à un stress neuro-émotionnel, paramètres de microclimat optimaux pour les catégories de travail 1a et 1b doivent être fournis conformément aux normes sanitaires et épidémiologiques en vigueur pour le microclimat des locaux industriels. Sur les autres lieux de travail, les paramètres du microclimat doivent être maintenus à un niveau acceptable qui répond aux exigences des normes ci-dessus. Dans les locaux de tous les types d'établissements éducatifs, culturels et de divertissement pour enfants et adolescents, où se trouvent des ordinateurs, des paramètres de microclimat optimaux doivent être fournis: env. 3 (table. 6) Dans les locaux équipés d'un PC, un nettoyage humide quotidien et une ventilation systématique sont effectués après chaque heure de travail sur le PC. Les niveaux d'ions positifs et négatifs dans l'air des locaux où se trouve le PC doivent être conformes aux normes sanitaires et épidémiologiques en vigueur. La teneur en produits chimiques nocifs dans l'air des locaux industriels, dans lesquels le travail à l'aide d'un PC est auxiliaire, ne doit pas dépasser les concentrations maximales admissibles de substances nocives dans l'air de la zone de travail conformément aux normes d'hygiène en vigueur. La teneur en produits chimiques nocifs dans l'air des pièces destinées à l'utilisation d'ordinateurs de tous types les établissements d'enseignement, ne doit pas dépasser les concentrations journalières moyennes maximales admissibles pour l'air atmosphérique conformément aux normes sanitaires et épidémiologiques en vigueur. Exigences relatives aux niveaux de bruit et de vibrations sur les lieux de travail équipés d'un PC. Dans les locaux de production, lors de l'exécution de travaux principaux ou auxiliaires à l'aide d'un PC, les niveaux de bruit sur les lieux de travail ne doivent pas dépasser les valeurs maximales admissibles établies pour ces types de travaux conformément aux normes sanitaires et épidémiologiques en vigueur. Dans les locaux de toutes les institutions éducatives, culturelles et de divertissement pour enfants et adolescents, où se trouvent des ordinateurs, les niveaux de bruit ne doivent pas dépasser les valeurs admissibles établies pour les bâtiments résidentiels et publics. Lors de l'exécution de travaux à l'aide d'un PC dans des locaux industriels, le niveau de vibration ne doit pas dépasser les valeurs de vibration autorisées pour les lieux de travail (catégorie 3, type "c") conformément aux normes sanitaires et épidémiologiques en vigueur. Dans les locaux de tous les types d'établissements éducatifs, culturels et de divertissement dans lesquels des PC sont exploités, le niveau de vibration ne doit pas dépasser les valeurs autorisées pour les bâtiments résidentiels et publics conformément aux normes sanitaires et épidémiologiques en vigueur. Les équipements bruyants (imprimantes, serveurs, etc.), dont le niveau sonore dépasse les normes, doivent être situés à l'extérieur des locaux avec un PC. 3.4 Influence de la pollution atmosphérique sur les résultats de mesure L'influence de la pollution atmosphérique sur les résultats des mesures obtenues n'a pas d'effet particulier. Pollution atmosphérique à mesures satellitaires n'a également aucun effet. De nombreuses études expérimentales menées ces dernières années dans le domaine de la minimisation des erreurs dans les déterminations de coordonnées satellitaires indiquent qu'à ce jour, l'un des facteurs dominants limitant la précision des résultats finaux est la prise en compte insuffisamment stricte de l'effet de la réfraction troposphérique, due à les difficultés de prise en compte de la teneur en vapeur d'eau des couches superficielles de l'atmosphère. Il y a aussi trois facteurs qui affectent les résultats finaux : la température, l'humidité et la pression. Sur la base des recherches, il a été constaté qu'en raison d'une prise en compte insuffisamment stricte de l'humidité de l'air, la précision de la détermination de la composante de coordonnées verticales est limitée à une valeur comprise entre 4 et 10 mm et pour les composantes horizontales de 2 à 5 mm. Dans cet esprit, une méthode est utilisée pour déterminer la valeur intégrale de l'humidité le long de la trajectoire de propagation des signaux radio du satellite au récepteur à l'aide de radiomètres directionnels à vapeur d'eau. Il est possible d'augmenter la précision de la détermination de la composante de coordonnées verticales d'environ 5 fois et d'atteindre le niveau de précision d'un millimètre. Mais l'utilisation de radiomètres à vapeur d'eau est associée à des surcoûts importants et à une complexité excessive de l'ensemble du processus d'observations satellitaires en chacun des points du réseau.
CONCLUSION
À la suite des travaux effectués et de l'analyse des résultats, les principales conclusions suivantes peuvent être tirées : 1. Le choix des équipements pour la mise en œuvre du projet s'explique par les caractéristiques du relief, la structure de la topographie initiale et les informations géodésiques et le manque de visibilité entre les points de contrôle, ainsi que la méthode de positionnement et la durée de l'observation dépendent des exigences de précision des documents réglementaires pertinents. 2. Les résultats de la détermination des coordonnées des marques d'identification et de leur reliure indiquent la pleine conformité avec les demandes du consommateur. De plus, lors de l'utilisation de la méthode GPS, une augmentation de la précision a été notée, une réduction significative du temps et des coûts matériels associés à la fois à la réalisation des mesures et au traitement des informations reçues, par rapport aux méthodes traditionnelles. 3. Il est nécessaire de noter les avantages indéniables de l'utilisation de la méthode GPS lors de la réalisation de travaux d'arpentage, par rapport à la méthode traditionnelle, qui est la suivante : - il n'y a pas besoin de ligne de visée entre les points ; - précision plus élevée réalisable dans la détermination des coordonnées des marques d'identification, et donc de leur liaison ; - augmente considérablement la vitesse de travail; - obtenir des résultats dans un système de coordonnées global unique ; - obtention complexe de coordonnées (tridimensionnelles, altitude planifiée); - un degré élevé d'automatisation du travail sur le terrain et caméral ; - la possibilité d'exécuter le travail par un seul interprète (opérateur); - améliorer la sécurité du travail ; - faisabilité économique avec utilisation intensive. Ainsi, il existe une base réelle pour l'introduction généralisée de méthodes satellitaires de déterminations géodésiques avec une augmentation de la précision des marques de marquage.
Annexe 1
Message de programme de traitement (fragment)
| **** Fichiers de sortie de la solution SSF/SSK pour les lignes de base sélectionnées **** | ||||||
| Solution .ssf/.ssk | De la gare | Vers la gare | Solution | pente | Rapport | |
| fichier de sortie | nom court | nom court | taper | |||
| O0002432.ssf | Base1 | socle 2 | Flotteur LI | |||
| O0002364.ssf | Base1 | socle 2 | LI fixe | |||
| O0002360.ssf | Base1 | Base C | LI fixe | |||
| O0002340.ssf | Base1 | Base C | LI fixe | |||
| O0002436.ssf | Base1 | Flotteur LI | ||||
| 000023 88.ssf | socle 2 | LI fixe | ||||
| O0002428.ssf | socle 2 | LI fixe | ||||
| O0002468.ssf | socle 2 | LI fixe | ||||
| O0002440.ssf | socle 2 | Rp-03 | LI fixe | |||
| O0002444.ssf | socle 2 | Rp-03 | LI fixe | |||
| O0002448.ssf | socle 2 | Rp-03 | LI fixe | |||
| O0002452.ssf | socle 2 | Rp-03 | LI fixe | |||
| O0002456.ssf | socle 2 | Rp-03 | LI fixe | |||
| O0002392.ssf | Rp-02 | LI fixe | ||||
| O0002420.ssf | Rp-02 | LI fixe | ||||
| O0002404.ssf | Rp-01 | socle 2 | LI fixe | |||
| O0002408.ssf | Rp-01 | Base C | LI fixe | |||
| O0002396.ssf | Rp-02 | socle 2 | LI fixe | |||
| O0002424.ssf | Rp-02 | socle 2 | LI fixe | |||
| O0002344.ssf | Rp-02 | Rp-01 | LI fixe | |||
| O0002368.ssf | Rp-02 | Rp-01 | LI fixe | |||
| O0002472.ssf | Rp-02 | Rp-04 | LI fixe | |||
| O0002460.ssf | Rp-03 | Base C | Flotteur LI | |||
| O0002464.ssf | Rp-03 | Base C | LI fixe | |||
| O0002480.ssf | Rp-03 | Rp-01 | LI fixe | |||
| O0002348.ssf | Rp-03 | Rp-04 | LI fixe | |||
| O0002372.ssf | Rp-03 | Rp-04 | LI fixe | |||
| O0002412.ssf | Rp-04 | socle 2 | LI fixe | |||
| O0002384.ssf | Rp-04 | Base C | LI fixe | |||
| 000024 16.ssf | Rp-04 | Base C | LI fixe | |||
| O0002400.ssf | Rp-04 | Rp-01 | LI fixe | |||
| O0002356.ssf | Rp-07 | Rp-01 | LI fixe | |||
| 000023 SO.ssf | Rp-07 | Rp-01 | LI fixe | |||
| 00002476.ssf | Rp-07 | Rp-03 | LI fixe | |||
| O0002352.ssf | Rp-07 | Rp-04 | LI fixe | |||
| 000023 76.ssf | Rp-07 | Rp-04 | LI fixe | |||
Suite de l'annexe 1
Redund.txt From Station To Station North East Up Delta N Delta E Delta U ID SSF File BPC Commentaire Base C Base 2 -7562.0637 -258.4196 -35.1682 0.0000 0.0000 0.0000 2435 Solutions importées des fichiers SSF 28-10-05 03:31 : 45 base de C base 2 -7562,0429 -258,6049 -35,2589 -0.0208 0,1853 0,0906 2367 Solutions importées de fichiers SSF 28-10-05 03:31:45 base de C 1 base de -4397,0472 6777,7670 5,2641 0,0000 0,0000 0,0000 2439 Solutions importées de SSF fichiers 28- 10-05 03:31:45 Base C Base 1 -4397.0625 6777.9494 5.3162 0.0154 0.1824 -0.0521 2363 Solutions importées à partir de fichiers SSF 28-10-05 03:31:45 Base C Base 1 -4397.0625 6777.9494 5.3162 0.0154 0.1824 -0.0521 2343 Solutions Importé à partir de fichiers SSF 28-10-05 03:31:45 base 2 base 1 3164.7060 6519.4814 37.0802 0.0000 0.0000 0.0000 2431 Solutions importées à partir de fichiers SSF 28-10-05 03:31:45 Base 2 Base 1 3164.7181 6519.4874 37.0611 -0.0121 0.0059 0,0190 2391 Solutions importées des fichiers SSF 28-10-05 03:31:45 Base 2 Base 1 3164,6928 6519,4871 37,0141 0,0132 0,005 7 0,0661 2471
Annexe 2
Coordonnées du point mesurées à l'aide deGPSrécepteur et l'exactitude de leur détermination
| № points | coordonnées | erreurs |
|
| 6155996.995 217842.670 | 0.00 3 0.00 3 0.00 6 |
||
| 6156759.621 218354.919 | 0.00 8 0.00 4 0.0 14 |
||
| 6156745.057 218311.510 | 0.00 1 0.00 1 0.0 04 |
||
| 6158660.593 218038.396 | 0.00 3 0.0 10 |
||
| 6158624.369 217979.607 | 0.0 13 |
||
| 6158621.175 217984.308 | 0.0 10 |
||
| 6158612.179 218058.471 | 0.0 04 0.00 6 0.0 12 |
||
| 6158613.355 218064.423 | |||
| 6158617.471 218067.430 | 0 .010 |
||
| 1 0 | 6158624.240 218075.890 | ||
| 6158627.523 218048.673 | |||
| 6158768.129 218247.920 | |||
| 6159090.223 217905.211 | |||
| 6159068.109 217962.410 | |||
| 6159053.257 217993.165 | |||
| 6156635.332 218201.444 | |||
| 6156168.439 219244.309 | |||
| 6156025.068 221289.235 | |||
| 6157553.007 220872.694 | |||
| 6157505.481 220804.210 | |||
Annexe 3
Tableau 1
| Type de produit | Paramètres d'hygiène contrôlés |
||
| Machines informatiques numériques électroniques, machines informatiques numériques électroniques personnelles (y compris les ordinateurs portables) | Niveaux de champs électromagnétiques (EMF), bruit acoustique, concentration de substances nocives dans l'air, indicateurs visuels de VDT, rayonnement X doux |
||
| Périphériques: Imprimantes, scanners, modems, périphériques réseau, alimentations sans interruption, etc. | Niveaux EMF, bruit acoustique, concentration de substances nocives dans l'air |
||
| Dispositifs d'affichage d'informations (terminaux d'affichage vidéo) | Niveaux EMF, indicateurs visuels, concentration de substances nocives dans l'air, rayons X mous |
||
| Machines de jeu utilisant un PC | Niveaux EMF, bruit acoustique, concentration de substances nocives dans l'air, indicateurs visuels de VDT, rayons X mous |
Suite de l'annexe 3
Tableau 2
Niveaux de pression acoustique en bandes d'octave avec des fréquences moyennes géométriques
| Niveaux sonores en dBA |
|||||||||
Tableau 3
Niveaux admissibles temporaires d'EMF générés par le PC
| Nom des paramètres | |
| 2 kHz-400 kHz | |
| Densité de flux magnétique Dans la gamme de fréquence 5Hz-2kHz 2 kHz-400 kHz | |
| Potentiel électrique de l'écran du moniteur vidéo 500 V |
|
Suite de l'annexe 3
Tableau 4
Paramètres visuels admissibles des dispositifs d'affichage d'informations
| Paramètres | Valeurs valides |
|
| Luminosité du champ blanc | Pas moins de 35 cd/m². |
|
| Pas plus de +- 20% |
||
| Au moins 3:1 |
||
| Instabilité temporelle de l'image (changement involontaire dans le temps de la luminosité d'une image sur un écran d'affichage) | Ne devrait pas être fixé |
|
| Instabilité spatiale de l'image (changement involontaire de la position des fragments d'image sur l'écran) |
Tableau 5
Niveaux admissibles temporaires d'EMF générés par PC sur les lieux de travail
| Nom des paramètres | |
| Intensité du champ électrique dans la gamme de fréquences 5 Hz-2 kHz 2 kHz-400 kHz | |
| Densité de flux magnétique Dans la gamme de fréquence 5Hz-2kHz 2 kHz-400 kHz | |
| Potentiel électrique de l'écran du moniteur vidéo 15 kV/m |
|
Suite de l'annexe 3
Tableau 6
Paramètres de microclimat optimaux dans tous les types de locaux éducatifs et préscolaires à l'aide d'un PC
| Température, C deg. | Humidité relative, % | Humidité absolue, g/m3 | Vitesse de l'air, m/s |
Tableau 7
Paramètres visuels du VDT contrôlés sur les lieux de travail
| Paramètres | Valeurs valides |
|
| Luminosité du champ blanc | Pas moins de 35 cd/m². |
|
| Luminosité inégale du champ de travail | Pas plus de +- 20% |
|
| Contraste (pour le mode monochrome) | Au moins 3:1 |
|
| Instabilité temporelle de l'image (scintillement) | Ne devrait pas être fixé |
|
| Instabilité spatiale de l'image (jitter) | Pas plus de 2* 10 ^-4L , où L est la distance d'observation de conception, mm |
BIBLIOGRAPHIE
1. Medvedev P.P., Baranov I.S., « Systèmes mondiaux de navigation spatiale », VINITI, série « Géodésie et photographie aérienne », 1992. 2. Neumyvakin Yu.K., Persky M.I., « Support géodésique de la gestion des terres et des travaux cadastraux », Moscou "Kartgeocenter" - "Geodesizdat", 1996. 3. "Instruction pour l'arpentage. Comité de la Fédération de Russie sur les ressources foncières et la gestion des terres, Moscou, Roskomzem, 1996. 4. Loi fédérale sur le cadastre foncier de l'État, n° 28-FZ, en vigueur. Président de la Fédération de Russie V.V. Poutine, Kremlin de Moscou, 2000. 5. Arpenteur-géomètre, système d'arpentage GPS, Trimble Navigation, 1993. 6. Geodetic Serveyor, système d'arpentage de précision avec la 6e technologie observable, 1992. 7. "4600SL Land Surveyor, manuel de l'opérateur", Trimble Navigation, 1991. 8. Tennissen PJG Contrôle Qualité et GPS //GPS pour la Géodésie (2
Édition), Springer, 1998. 9. Antonovitch K.M. L'utilisation de la radionavigation par satellite
systèmes en géodésie. Volume I //M., FSUE Kartgsotsntr, 2005. 10. Genike A.A., Pobedinsky G.G. systèmes satellitaires mondiaux
positionnement et leur application en géodésie. // M.,
Kartgeocenter, 2004. 11. Exigences hygiéniques pour les ordinateurs électroniques personnels et organisation du travail. Règles et réglementations sanitaires et épidémiologiques SanPin 2.2.2 / 2.4.1340-03 Akopova N.E. 2003 12. Dr Sc. Klyushin G.B., Assoc. Markelova G.10., Ph.D., prof. Shlaiak VV,
Lignes directrices pour la préparation des travaux de qualification finale
pour les spécialités : Géodésie astronomique, Géodésie spatiale, Appliquée
géodésie. // M, MIIGAIK 2006
Programme d'études de base 220400. 62 Gestion des systèmes techniques Baccalauréat
développement et offre de services éducatifs dans le domaine de l'enseignement professionnel secondaire, supérieur et complémentaire, de l'enseignement postuniversitaire; le travail d'enseignement et de recherche est certifié par DQS et GOST R selon ISO 9001:2008
Le programme d'enseignement principal de l'enseignement professionnel supérieur Domaine d'études (42)
Programme éducatif principalLes résultats de la maîtrise du BEP HPE sont déterminés par les compétences acquises par le diplômé, c'est-à-dire sa capacité à appliquer ses connaissances, ses compétences et ses qualités personnelles conformément aux tâches de l'activité professionnelle.
Systèmes de navigation par satellite
DocumentSurveillance dépendante automatique. Méthode de surveillance qui fournit automatiquement des informations sur la liaison de données à partir des systèmes de navigation et de positionnement des aéronefs, y compris les signaux
Gymnase MOU Parabelskaya
abstrait
Systèmes de communication par satellite
Rempli
Goroshkina Xenia
élève de 11ème
vérifié
Borisov Alexandre Vladimirovitch
parabel
2010
Présentation 3
1. Principes d'organisation des canaux de communication par satellite 4
2. Orbites des satellites de communication 5
3. Schéma type d'organisation des services communication par satellite 6
4. Domaines d'application des communications par satellite 6
4.1.Principes d'organisation des satellites Communications VSAT 7
4.2.Principes d'organisation des communications mobiles par satellite 7
5. Technologies utilisées dans les communications par satellite 8
6. Historique de la création des systèmes de communication par satellite 11
6.1. Les premières lignes de communication et de diffusion par satellite via le satellite "Molniya-1" 12
6.2. Le premier système satellite au monde "Orbita" pour la distribution de programmes TV 13
6.3. Le premier système de télédiffusion directe au monde "Ekran" 14
6.4. Systèmes de distribution pour les programmes télévisés "Moscou" et "Moscou-Global 15"
6.5. Système de diffusion TV par satellite dans la bande 12 GHz 16
6.6. Création du système Interspoutnik 16
6.7. Création d'une liaison satellite pour les communications gouvernementales 17
6.8. En conclusion… 17
Liste de la littérature utilisée 20
introduction
Les systèmes de communication par satellite (SCC) sont connus depuis longtemps et sont utilisés pour transmettre divers signaux sur de longues distances. Depuis sa création, les communications par satellite se sont développées rapidement, et avec l'accumulation d'expérience, l'amélioration des équipements, le développement des méthodes de transmission du signal, il y a eu une transition des lignes de communication par satellite individuelles vers des systèmes locaux et mondiaux.
De tels taux de développement du CCC s'expliquent par un certain nombre d'avantages qu'ils possèdent. Ceux-ci incluent, en particulier, une large bande passante, des espaces de chevauchement illimités, une qualité et une fiabilité élevées des canaux de communication. Ces avantages, qui déterminent les vastes possibilités des communications par satellite, en font un moyen de communication unique et efficace. La communication par satellite est actuellement le principal type de communication internationale et nationale sur de longues et moyennes distances. L'utilisation de satellites terrestres artificiels pour les communications continue de se développer à mesure que les réseaux de communication existants se développent. De nombreux pays construisent leurs propres réseaux nationaux de communication par satellite.
Un système de communication automatisé unifié est en cours de création dans notre pays. Pour ce faire, divers moyens techniques de communication sont développés, améliorés et de nouveaux domaines d'application sont trouvés.
Dans mon résumé, je considérerai les principes d'organisation des systèmes satellitaires, le champ d'application, l'historique de la création du SSS. De nos jours, la diffusion par satellite fait l'objet de beaucoup d'attention, nous devons donc savoir comment fonctionne le système.
1. Principes d'organisation des canaux de communication par satellite
La communication par satellite est l'un des types de communication radio basés sur l'utilisation de satellites terrestres artificiels comme répéteurs.
La communication par satellite s'effectue entre des stations terriennes, qui peuvent être à la fois fixes et mobiles. La communication par satellite est l'évolution de la communication traditionnelle par relais radio en plaçant le répéteur à très haute altitude (de quelques centaines à plusieurs dizaines de milliers de kilomètres). Puisque la zone de sa visibilité dans ce cas est presque la moitié du globe, il n'y a pas besoin d'une chaîne de répéteurs. Pour la transmission par satellite, le signal doit être modulé. La modulation se fait sur station terrienne. Le signal modulé est amplifié, transféré à la fréquence souhaitée et envoyé à l'antenne d'émission.
Dans les premières années de recherche, des répéteurs satellites passifs étaient utilisés, qui étaient un simple réflecteur de signal radio (souvent une sphère en métal ou en polymère avec un revêtement métallique) qui ne transportait aucun équipement émetteur-récepteur à bord. Ces satellites n'ont pas été distribués. Tous les satellites de communication modernes sont actifs. Les répéteurs actifs sont équipés d'équipements électroniques pour recevoir, traiter, amplifier et retransmettre un signal. Les répéteurs satellites peuvent être non régénératifs et régénératifs.
Un satellite non régénératif, ayant reçu un signal d'une station terrienne, le transfère sur une autre fréquence, l'amplifie et le transmet à une autre station terrienne. Un satellite peut utiliser plusieurs canaux indépendants pour effectuer ces opérations, chacun opérant sur une partie spécifique du spectre (ces canaux de traitement sont appelés transpondeurs).
Le satellite régénératif démodule signal reçu et le remoduler. De ce fait, la correction d'erreur est effectuée deux fois : au niveau du satellite et au niveau de la station terrienne de réception. L'inconvénient de cette méthode est la complexité (et donc le coût beaucoup plus élevé du satellite), ainsi que l'augmentation du délai de transmission du signal.
2. Orbites des satellites de communication
Les orbites sur lesquelles se trouvent les transpondeurs des satellites sont divisées en trois classes :
1 - équatorial, 2 - oblique, 3 - polaire
Une variation importante de l'orbite équatoriale est orbite géostationnaire, à laquelle le satellite tourne avec une vitesse angulaire égale à la vitesse angulaire de la Terre, dans une direction coïncidant avec le sens de rotation de la Terre. L'avantage évident de l'orbite géostationnaire est que le récepteur dans la zone de service "voit" le satellite tout le temps. Cependant, il n'y a qu'une seule orbite géostationnaire et il est impossible d'y mettre tous les satellites. Son autre inconvénient est sa haute altitude, et donc le coût élevé du lancement d'un satellite en orbite. De plus, un satellite en orbite géostationnaire ne peut pas desservir les stations terriennes de la région circumpolaire.
orbite inclinée résout ces problèmes, cependant, en raison du mouvement du satellite par rapport à l'observateur au sol, il est nécessaire de lancer au moins trois satellites sur une orbite afin de fournir un accès 24 heures sur 24 aux communications.
orbite polaire est le cas limite de l'oblique.
Lorsqu'elles utilisent des orbites inclinées, les stations terriennes sont équipées de systèmes de poursuite qui pointent l'antenne vers le satellite. Les stations exploitant des satellites en orbite géostationnaire sont également généralement équipées de tels systèmes pour compenser les écarts par rapport à l'orbite géostationnaire idéale. L'exception concerne les petites antennes utilisées pour la réception Télévision par satellite: Leur faisceau est suffisamment large pour qu'ils ne sentent pas le satellite osciller autour du point idéal. Une caractéristique de la plupart des systèmes de communications mobiles par satellite est la petite taille de l'antenne du terminal, qui rend difficile la réception du signal.
3. Schéma type d'organisation des services de communication par satellite
- opérateur segment satellite crée un satellite de communication à ses frais en passant une commande pour la fabrication d'un satellite auprès de l'un des fabricants de satellites, et en assure le lancement et la maintenance. Après la mise en orbite du satellite, l'opérateur du segment satellite commence à fournir des services de location de la ressource de fréquence du satellite répéteur à des sociétés exploitant des services de communication par satellite.
- un opérateur de services de communications par satellite conclut un accord avec un opérateur de segment satellite pour l'utilisation (location) de capacités sur un satellite de communications, en l'utilisant comme répéteur avec une large zone de service. Un opérateur de services de communications par satellite construit l'infrastructure au sol de son réseau sur une plate-forme technologique spécifique produite par des fabricants d'équipements au sol pour les communications par satellite.
4. Portée des communications par satellite :
- Communications par satellite dorsales : Initialement, l'émergence des communications par satellite a été dictée par la nécessité de transmettre de grandes quantités d'informations. Au fil du temps, la part de la transmission vocale dans le volume total du trafic dorsal n'a cessé de diminuer, laissant la place à la transmission de données. Avec le développement des réseaux à fibre optique, ces derniers ont commencé à supplanter les communications par satellite du marché des communications dorsales.
- Systèmes VSAT R : Les systèmes VSAT (Very Small Aperture Terminal) fournissent des services de communication par satellite aux clients (généralement de petites organisations) qui n'ont pas besoin d'une bande passante élevée. Le taux de transfert de données pour un VSAT est généralement inférieur à 2048 kbps. Les mots "très petite ouverture" font référence à la taille des antennes terminales par rapport aux anciennes antennes dorsales. Les terminaux VSAT fonctionnant en bande C utilisent généralement des antennes d'un diamètre de 1,8 à 2,4 m, en bande Ku - 0,75 à 1,8 m. Les systèmes VSAT utilisent la technologie de canalisation à la demande.
- Systèmes de communications mobiles par satellite: Une caractéristique de la plupart des systèmes mobiles par satellite est la petite taille de l'antenne du terminal, qui rend difficile la réception du signal.
4.1.Principes d'organisation des communications par satellite VSAT :
 élément principal réseau satellitaire VSAT - CCN. C'est le Centre de Contrôle du Réseau qui permet d'accéder aux équipements clients depuis Internet, le réseau téléphonique public, les autres terminaux du réseau VSAT, et met en œuvre l'échange de trafic au sein réseau d'entreprise client. Le NCC dispose d'une connexion à large bande aux canaux de communication de la dorsale fournis par les opérateurs de la dorsale et assure le transfert d'informations d'un terminal VSAT distant vers le monde extérieur.
élément principal réseau satellitaire VSAT - CCN. C'est le Centre de Contrôle du Réseau qui permet d'accéder aux équipements clients depuis Internet, le réseau téléphonique public, les autres terminaux du réseau VSAT, et met en œuvre l'échange de trafic au sein réseau d'entreprise client. Le NCC dispose d'une connexion à large bande aux canaux de communication de la dorsale fournis par les opérateurs de la dorsale et assure le transfert d'informations d'un terminal VSAT distant vers le monde extérieur.
4.2.Principes d'organisation des communications mobiles par satellite :
Pour que la force du signal atteignant le récepteur satellite mobile soit suffisante, l'une des deux solutions est utilisée :
- Les satellites sont placés en orbite géostationnaire. Comme cette orbite est à 35 786 km de la Terre, un émetteur puissant est nécessaire sur le satellite.
- De nombreux satellites sont situés sur des orbites inclinées ou polaires. Dans le même temps, la puissance d'émission requise n'est pas si élevée et le coût de lancement d'un satellite en orbite est inférieur. Cependant, cette approche nécessite non seulement un grand nombre de satellites, mais également un vaste réseau de commutateurs terrestres.
- Équipement client (mobile terminaux satellites, téléphones satellites) interagissent avec le monde extérieur ou entre eux au moyen d'un satellite répéteur et de passerelles de l'opérateur de services de communications mobiles par satellite, assurant la connexion à des canaux de communication terrestres externes (réseau téléphonique public, Internet, etc.)

5. Technologies utilisées dans les communications par satellite
M utilisation multiple des fréquences dans les communications par satellite.Étant donné que les radiofréquences sont une ressource limitée, il est nécessaire de s'assurer que les mêmes fréquences peuvent être utilisées par différentes stations terriennes. Vous pouvez le faire de deux manières :
- séparation spatiale - chaque antenne satellite ne reçoit un signal que d'une certaine zone, tandis que différentes zones peuvent utiliser les mêmes fréquences.
- séparation de polarisation - différentes antennes reçoivent et transmettent un signal dans des plans de polarisation mutuellement perpendiculaires, tandis que les mêmes fréquences peuvent être appliquées deux fois (pour chacun des plans).
H gammes de fréquences.
Le choix de la fréquence de transmission des données d'une station terrienne vers un satellite et d'un satellite vers une station terrienne n'est pas arbitraire. La fréquence affecte, par exemple, l'absorption des ondes radio dans l'atmosphère, ainsi que les dimensions requises des antennes d'émission et de réception. Les fréquences auxquelles se produisent les transmissions station terrienne vers satellite sont différentes de celles utilisées pour les transmissions satellite vers station terrienne (généralement la première est plus élevée). Les fréquences utilisées dans les communications par satellite sont divisées en gammes, désignées par des lettres :
| Nom de la plage |
Fréquences |
Application |
| Communications mobiles par satellite |
||
| Communications mobiles par satellite |
||
| 4 GHz, 6 GHz |
Communications fixes par satellite |
|
| Pour les communications par satellite dans cette gamme, les fréquences ne sont pas définies. Pour les applications radar, la gamme 8-12 GHz est spécifiée. |
Communications fixes par satellite (à des fins militaires) |
|
| 11 GHz, 12 GHz, 14 GHz |
||
| Communications fixes par satellite, radiodiffusion par satellite |
||
| Communications fixes par satellite, communications inter-satellites |
La bande Ku permet la réception avec des antennes relativement petites, et est donc utilisée dans la télévision par satellite (DVB), malgré le fait que les conditions météorologiques ont un impact significatif sur la qualité de transmission dans cette bande. Pour la transmission de données par de grands utilisateurs (organisations), la bande C est souvent utilisée. Cela offre une meilleure qualité de réception, mais nécessite une antenne assez grande.
M modulation et codage correcteur d'erreurs
Une caractéristique des systèmes de communication par satellite est la nécessité de travailler dans des conditions de rapport signal/bruit relativement faible, causées par plusieurs facteurs :
- une distance considérable entre le récepteur et l'émetteur,
- puissance satellite limitée
Les communications par satellite ne sont pas bien adaptées à la transmission de signaux analogiques. Par conséquent, pour transmettre la parole, celle-ci est prénumérisée à l'aide d'une modulation par impulsions codées.
Pour la transmission de données numériques sur canal satellitaire communication, ils doivent d'abord être convertis en un signal radio occupant une certaine gamme de fréquences. Pour ce faire, on utilise la modulation (la modulation numérique est aussi appelée keying).
En raison de la faible intensité du signal, des systèmes de correction d'erreurs sont nécessaires. Pour cela, divers schémas de codage correcteurs de bruit sont utilisés, le plus souvent diverses variantes de codes convolutifs, ainsi que des turbo-codes.
6. L'histoire de la création des systèmes de communication par satellite
L'idée de créer des systèmes mondiaux de communication par satellite sur Terre a été avancée en 1945. Arthur Clark qui devint plus tard un célèbre écrivain de science-fiction. La mise en œuvre de cette idée n'est devenue possible que 12 ans après l'apparition des missiles balistiques, avec lesquels 4 octobre 1957 Le premier satellite artificiel de la Terre (AES) a été lancé en orbite. Pour contrôler le vol du satellite, un petit émetteur radio a été placé dessus - une balise fonctionnant dans la gamme 27 MHz. Après quelques années 12 avril 1961. pour la première fois au monde dans l'URSS vaisseau spatial"Vostok" Yu.A. Gagarine a effectué un vol historique autour de la Terre. Dans le même temps, l'astronaute communiquait régulièrement avec la Terre par radio. Ainsi a commencé le travail systématique sur l'étude et l'utilisation de l'espace extra-atmosphérique pour résoudre divers problèmes pacifiques.
La création de la technologie spatiale a rendu possible le développement de très des systèmes efficaces communication et diffusion radio longue distance. Aux États-Unis a commencé travail intensif pour la création de satellites de communication. Un tel travail a commencé à se dérouler dans notre pays. Son vaste territoire et le faible développement des communications, en particulier dans les régions peu peuplées de l'Est, où la création de réseaux de communication utilisant d'autres moyens techniques (RRL, lignes câblées, etc.) est associée à des coûts élevés, ont fait de cette le nouveau genre Les connexions sont très prometteuses.
À l'origine de la création des systèmes nationaux de radio par satellite se trouvaient des scientifiques et des ingénieurs nationaux exceptionnels qui dirigeaient de grands centres de recherche: M. F. Reshetnev, M.R. Kaplanov, NI Kalachnikov, L.Ya. Chantre
Les principales tâches confiées aux scientifiques étaient les suivantes :
Développement de répéteurs satellites pour la télédiffusion et les communications ("Screen", "Rainbow", "Hals"), depuis 1969, les répéteurs satellites ont été développés dans un laboratoire séparé dirigé par M.V. Brodski ;
Création de projets de systèmes pour la construction de communications et de diffusion par satellite ;
Développement d'équipements pour stations terriennes (ES) de communications par satellite : modulateurs, démodulateurs abaisseurs de seuil de signaux FM (modulation de fréquence), dispositifs de réception et d'émission, etc. ;
Réaliser des travaux complexes d'équipement des stations de communication et de diffusion par satellite;
Développement de la théorie des démodulateurs FM de poursuite avec seuil de bruit réduit, méthodes d'accès multiples, méthodes de modulation et codage correcteur d'erreurs ;
Élaboration de la documentation réglementaire et technique des chaînes, des voies de télévision et des équipements de communication des systèmes satellitaires ;
Développement de systèmes de contrôle et de surveillance pour les réseaux de communication et de diffusion AP et par satellite.
Spécialistes NIIR de nombreux systèmes nationaux de communication et de diffusion par satellite ont été créés, qui fonctionnent encore aujourd'hui. L'équipement émetteur-récepteur au sol et embarqué de ces systèmes a également été développé au NIIR. En plus de l'équipement, les spécialistes de l'institut ont proposé des méthodes pour concevoir à la fois les systèmes satellites eux-mêmes et les dispositifs individuels qu'ils contiennent. L'expérience de la conception de systèmes de communication par satellite des spécialistes NIIR se reflète dans de nombreuses publications scientifiques et monographies.
6.1. Les premières lignes de communication et de diffusion par satellite via le satellite "Molniya-1"
Les premières expériences sur les communications par satellite en réfléchissant les ondes radio du satellite américain réfléchissant "Echo" et de la Lune, utilisées comme répéteurs passifs, ont été réalisées par des spécialistes du NIIR en 1964. Le radiotélescope de l'observatoire du village de Zimenki, dans la région de Gorky, a reçu des messages télégraphiques et un simple dessin de l'observatoire anglais "Jodrell Bank".
Cette expérience a prouvé la possibilité d'utiliser avec succès des objets spatiaux pour organiser les communications sur Terre.
Plusieurs projets de système ont été préparés dans le laboratoire de communication par satellite, puis elle a participé au développement du premier système de communication par satellite domestique "Molniya-1" en gamme de fréquence inférieure à 1 GHz. L'organisation responsable de la création de ce système était l'Institut de recherche sur les radiocommunications de Moscou (MNIIRS). Le concepteur en chef du système Molniya-1 est MONSIEUR. Kaplanov- Directeur Adjoint du MNIIRS.
Dans les années 1960, NIIR développait un complexe émetteur-récepteur pour le système de relais radio troposphérique Horizont, fonctionnant également dans la gamme de fréquences inférieure à 1 GHz. Ce complexe a été modifié et l'équipement créé, appelé "Horizon-K", a été utilisé pour équiper la première ligne de communication par satellite "Molniya-1", qui reliait Moscou et Vladivostok. Cette ligne était destinée à la transmission d'un programme TV ou d'un spectre groupé de 60 canaux téléphoniques. Avec la participation de spécialistes du NIIR, deux stations terriennes (ES) ont été équipées dans ces villes. MRIRS a développé un répéteur embarqué pour le premier satellite de communications artificielles Molniya-1, qui a été lancé avec succès 23 avril 1965. Il a été lancé sur une orbite hautement elliptique avec une période de révolution autour de la Terre en heures 12. Une telle orbite était pratique pour desservir le territoire de l'URSS situé aux latitudes nord, car pendant huit heures sur chaque orbite du satellite, il était visible de n'importe quel point du pays. De plus, le lancement sur une telle orbite depuis notre territoire s'effectue avec moins d'énergie que sur une orbite géostationnaire. L'orbite du satellite Molniya-1 a conservé son importance à ce jour et est utilisée malgré le développement dominant des satellites géostationnaires.
6.2. Le premier système satellite au monde "Orbita" pour la distribution de programmes TV
Après l'achèvement des recherches sur les capacités techniques du satellite "Molniya-1" par des spécialistes du NIIR NV Talyzin et L.Ya. Kantor il a été proposé de résoudre le problème de la fourniture de programmes télévisés de la télévision centrale aux régions orientales du pays en créant le premier système de diffusion par satellite au monde "Orbita" en dans la bande 1 GHz basée sur l'équipement "Horizon-K".
En 1965-1967. en un temps record, dans les régions orientales de notre pays, 20 stations terriennes "Orbita" et une nouvelle station centrale d'émission "Reserve" ont été simultanément construites et mises en service. Le système Orbita est devenu le premier système de distribution circulaire de télévision par satellite au monde, dans lequel les possibilités des communications par satellite sont utilisées le plus efficacement.
Il convient de noter que la plage dans laquelle nouveau système L'"orbite" 800-1000 MHz ne correspondait pas à celle attribuée par le Règlement des radiocommunications au service fixe par satellite. Les travaux de transfert du système Orbita vers la bande C 6/4 GHz ont été menés par des spécialistes du NIIR au cours de la période 1970-1972. La station opérant dans la nouvelle bande de fréquences a été nommée Orbita-2. Pour cela, un ensemble complet d'équipements a été créé pour fonctionner dans la gamme de fréquences internationale - dans la section Terre-Espace - dans la bande 6 GHz, dans la section Espace-Terre - dans la bande 4 GHz. Sous la direction de V.M. Cirlina un système de pointage et de poursuite automatique des antennes avec un dispositif logiciel a été développé. Ce système utilise un automate extrémal et une méthode de balayage conique.
La station "Orbita-2" a commencé à prendre racine depuis 1972., une fin 1986. environ 100 d'entre eux ont été construits et beaucoup d'entre eux exploitent actuellement des stations d'émission-réception.
Plus tard, pour le fonctionnement du réseau Orbita-2, le premier satellite géostationnaire soviétique Raduga a été créé et lancé en orbite, dont le répéteur embarqué multi-tonneaux a été créé au NIIR (le chef de projet AD Fortushenko et ses participants MV Brodsky, A . I. Ostrovsky, Yu.M. Fomin, etc.) Dans le même temps, la technologie de fabrication et les méthodes de traitement au sol des produits spatiaux ont été créées et maîtrisées.
Pour le système Orbita-2, de nouveaux dispositifs de transmission "Gradient" (I.E. Mach, M.Z. Zeitlin et autres), ainsi que des amplificateurs paramétriques (A.V. Sokolov, E.L. Ratbil, BC Sanin, VM Krylov) et des dispositifs de réception de signaux (VI Dyachkov, VM Dorofeev, Yu.A. Afanasiev, VA Polukhin, etc.).
6.3. Le premier système de télédiffusion directe au monde "Ekran"
Le développement généralisé du système Orbita comme moyen de diffusion de programmes télévisés est devenu économiquement injustifié à la fin des années 70 en raison du coût élevé de l'AP, ce qui rend inopportun son installation dans un point avec une population de moins de 100 à 200 000 habitants. gens. Le système "Ekran", fonctionnant dans la gamme de fréquences inférieure à 1 GHz et ayant une puissance d'émission élevée du répéteur embarqué (jusqu'à 300 W), s'est avéré plus efficace. Le but de la création de ce système était de couvrir les zones peu peuplées de la Sibérie, de l'Extrême-Nord et d'une partie de l'Extrême-Orient avec la diffusion télévisée. Pour sa mise en œuvre, des fréquences de 714 et 754 MHz ont été attribuées, sur lesquelles il a été possible de créer des appareils de réception assez simples et bon marché. Le système Ekran est devenu en fait le premier système de diffusion directe par satellite au monde.
Les installations de réception de ce système devaient être rentables à la fois pour desservir les petites communautés et pour la réception individuelle des programmes de télévision.
Le premier satellite du système Ekran a été lancé 26 octobre 1976 . en orbite géostationnaire à 99°E. Un peu plus tard à Krasnoïarsk, des stations de réception collectives "Ekran-KR-1" et "Ekran-KR-10" ont été produites avec une puissance d'émission de télévision de 1 et 10 W. La station terrienne transmettant des signaux au satellite "Ekran" avait une antenne avec un diamètre de miroir de 12 m; elle était équipée d'un émetteur "Gradient" d'une puissance de 5 kW, fonctionnant dans la bande 6 GHz. Les unités de réception de ce système, développées par des spécialistes du NIIR, étaient les stations de réception les plus simples et les moins chères de toutes celles mises en œuvre au cours de ces années. À la fin de 1987, le nombre de stations Ekran installées avait atteint 4 500.
6.4. Systèmes de distribution des programmes télévisés "Moscow" et "Moscow-Global"
De nouveaux progrès dans le développement des systèmes de diffusion de télévision par satellite dans notre pays sont associés à la création du système "Moscou", dans lequel les ES techniquement obsolètes du système "Orbita" ont été remplacés par de petits ES. Le développement des petits ES a commencé en 1974à l'initiative NV Talyzina et L.Ya. Kantor.
Pour le système Moskva sur le satellite Gorizont, un tronc haute puissance a été fourni, fonctionnant dans la bande 4 GHz vers une antenne étroitement dirigée. Les rapports d'énergie dans le système ont été choisis de manière à garantir l'utilisation d'une petite antenne parabolique avec un diamètre de miroir de 2,5 m sans guidage automatique sur l'ES de réception. La principale caractéristique du système "Moscou" était le strict respect des normes de densité spectrale de puissance surfacique à la surface de la Terre, établies par le Règlement pour les besoins de la communication des systèmes du service fixe. Cela a permis d'utiliser ce système pour la diffusion télévisée dans toute l'URSS. Le système assurait la réception de haute qualité programmes de télévision et programmes de radio centraux. Par la suite, un autre canal a été créé dans le système, conçu pour transmettre des pages de journaux.
Ces stations se sont également généralisées dans les établissements nationaux situés à l'étranger (en Europe, en Afrique du Nord et dans de nombreux autres territoires), ce qui a permis à nos concitoyens à l'étranger de recevoir programmes nationaux. Lors de la création du système "Moskva", un certain nombre d'inventions et de solutions originales ont été utilisées, ce qui a permis d'améliorer à la fois la construction du système lui-même et ses systèmes matériels. Ce système a servi de prototype pour de nombreux systèmes de satellites créés plus tard aux États-Unis et Europe de l'Ouest, dans laquelle des satellites de moyenne puissance fonctionnant dans la bande du service fixe par satellite étaient utilisés pour fournir des programmes télévisés à des SE de petite taille et à coût modéré.
Au cours de 1986-1988. Un système spécial "Moscow-Global" avec de petits points d'accès a été développé, conçu pour fournir des programmes de télévision centraux aux bureaux de représentation nationaux à l'étranger, ainsi que pour transmettre une petite quantité d'informations discrètes. Ce système est également opérationnel. Il prévoit l'organisation d'un canal de télévision, de trois canaux pour la transmission d'informations discrètes à une vitesse de 4800 bps et de deux canaux à une vitesse de 2400 bps. Des canaux discrets de transmission d'informations ont été utilisés dans l'intérêt du Comité de la radiodiffusion télévisuelle et radiophonique, du TASS et de l'APN (Agence de presse politique). Il utilise deux satellites en orbite géostationnaire à 11°W pour couvrir la quasi-totalité du globe. et 96°E Les stations de réception ont un miroir d'un diamètre de 4 m, l'équipement peut être situé à la fois dans un conteneur spécial et à l'intérieur.
6.5. Système de diffusion TV par satellite dans la bande 12 GHz
Depuis 1976. NIIR a commencé à travailler sur la création d'un système de télévision par satellite fondamentalement nouveau au cours de ces années dans la bande de fréquences 12 GHz (STV-12) attribuée selon le plan international pour une telle diffusion de télévision par satellite, qui n'aurait pas les restrictions de puissance rayonnée inhérentes à l'Ekran et "Moscou" et pourrait assurer la couverture de l'ensemble du territoire de notre pays avec une diffusion télévisée multiprogramme, ainsi que l'échange de programmes et la solution du problème de la diffusion républicaine. Lors de la création de ce système, le NIIR était l'organisation chef de file.
Les spécialistes de l'institut ont mené des études qui ont déterminé les paramètres optimaux de ce système et ont développé des répéteurs aéroportés multibarils et des équipements de transmission et de réception AP. Au premier stade de développement de ce système, le satellite national "Hals" a été utilisé, les signaux ont été transmis sous forme analogique et un équipement de réception importé a été utilisé. Plus tard, une transition a été faite pour équipement numérique basé sur un satellite étranger, ainsi que des équipements de transmission et de réception.
6.6. Création du système Interspoutnik
En 1967 le développement de la coopération internationale entre les pays socialistes dans le domaine des communications par satellite a commencé. Son but était de créer international système satellitaire "Interspoutnik", conçu pour répondre aux besoins de la Bulgarie, de la Hongrie, de l'Allemagne, de la Mongolie, de la Pologne, de la Roumanie, de l'URSS et de la Tchécoslovaquie en matière de communications téléphoniques, de transmission de données et d'échange de programmes télévisés . En 1969 un projet de ce système, les fondements juridiques de l'organisation Interspoutnik ont été développés, et en 1971 a signé un accord sur sa création.
Le système Interspoutnik est devenu le deuxième système international de communication par satellite au monde (après le système Intelsat). Les spécialistes du NIIR ont développé des projets AP, qui ont été construits avec l'aide de l'URSS dans de nombreux pays de la communauté socialiste. Le premier AP à l'étranger a été créé à Cuba et le second en Tchécoslovaquie. Au total, NIIR a fourni plus de dix points d'accès à l'étranger pour recevoir des programmes TV, AP et spéciaux.
Initialement, Interspoutnik utilisait des satellites de type Molniya-3 sur une orbite très elliptique, et depuis 1978, deux satellites géostationnaires multibarils de type Gorizont avec des stations à 14° Ouest. et 53° (puis 80°) E Initialement, l'émetteur "Gradient-K" et le complexe de réception "Orbita-2" ont été installés sur le ZS.
Toutes les solutions système et techniques pour la création du système Interspoutnik, ainsi que l'équipement AP, ont été créées par des spécialistes NIIR en collaboration avec l'usine pilote NIIR Promsvyazradio et les organisations co-exécutantes. Le système Interspoutnik est toujours en activité aujourd'hui, louant les troncs de la constellation spatiale russe, ainsi qu'utilisant son satellite géostationnaire LMI-1, situé à une position de 75 ° E. Les travaux ont été réalisés en coopération avec l'Association de production d'Iskra (Krasnoïarsk), les usines d'ingénierie radio de Moscou et de Podolsk.
Le directeur des travaux était SV Borodich .
6.7. Création d'une liaison satellite pour les communications gouvernementales
En 1972. Un accord intergouvernemental a été conclu entre l'URSS et les États-Unis sur la création d'une ligne directe de communications gouvernementales (LPS) entre les chefs d'État en cas d'urgence. La mise en œuvre de cet important accord gouvernemental a été confiée aux spécialistes du NIIR. Le concepteur en chef du développement du LPS était V.L. Bykov, et exécuteurs responsables - I.A. Yastrebtsov, A.N. Vorobiev.
Deux PA ont été créés sur le territoire de l'URSS: l'un (à Dubna près de Moscou), le second (à Zolochev près de Lvov). La mise en service du LPS a eu lieu en 1975. Il fonctionne à travers l'AP "Dubna" jusqu'à nos jours. Il s'agissait de la première expérience de travail sur la création par des spécialistes nationaux d'une ligne satellite en système international Intelsat.
6.8. En garde à vue…
En 1960-1980. Les spécialistes du NIIR ont résolu des problèmes très importants pour notre État et techniquement complexes liés à la création de systèmes nationaux de communication et de diffusion par satellite.
· Des systèmes de distribution de programmes télévisés sur l'ensemble du vaste territoire de notre pays, y compris la diffusion directe par satellite, ont été créés. De nombreux systèmes créés au NIIR ont été les premiers au monde: "Orbita", "Ekran", "Moskva", etc. Les équipements de la partie sol de ces systèmes, ainsi que les équipements embarqués, ont également été développés par NIIR, il a été produit par la branche de production nationale.
· Les systèmes de communication et de diffusion par satellite ont permis de répondre aux besoins de dizaines de millions de citoyens de notre pays, en particulier ceux qui vivaient dans les régions peu peuplées de la Sibérie occidentale et de l'Extrême-Orient. Avec la création de systèmes satellitaires dans ces régions, pour la première fois, les citoyens ont la possibilité de recevoir en temps réel les programmes de la télévision centrale.
· L'introduction de systèmes satellitaires était extrêmement importante pour le développement économique et social des régions difficiles d'accès de la Sibérie et de l'Extrême-Orient, ainsi que du pays tout entier.
· La population de Sakhaline, du Kamtchatka, du territoire de Khabarovsk et de nombreux autres territoires éloignés a reçu l'accès au réseau téléphonique public.
Les scientifiques du NIIR ont terminé l'original Recherche scientifique, visant à créer des méthodes de calcul de divers types d'appareils utilisés dans les systèmes de communication par satellite. Ils ont également créé une méthodologie de conception de systèmes de communication par satellite et rédigé un certain nombre de monographies fondamentales et d'articles scientifiques sur les problèmes de communication par satellite.
Conclusion
Les organisations modernes se caractérisent par un grand volume d'informations diverses, principalement électroniques et de télécommunications, qui les traversent chaque jour. Par conséquent, il est important d'avoir une sortie de haute qualité vers les nœuds de commutation, qui donnent accès à toutes les lignes de communication importantes. En Russie, où les distances entre les colonies sont énormes et où la qualité des lignes terrestres laisse à désirer, la meilleure solution à ce problème est l'utilisation de systèmes de communication par satellite (SCC).
Initialement, CCC était utilisé pour transmettre un signal TV. Notre pays se caractérise par un vaste territoire qui doit être couvert par les moyens de communication. Il est devenu plus facile de le faire après l'avènement des communications par satellite, à savoir le système Orbita-2. Plus tard, les téléphones satellites sont apparus, dont le principal avantage est l'indépendance de la présence de tout réseau téléphonique local. Une communication téléphonique de haute qualité est disponible de presque partout dans le monde.
Dans le cadre du programme présidentiel « Universal Communication Service », des publiphones ont été installés dans chaque localité et des publiphones par satellite ont été utilisés dans les zones particulièrement reculées.
Selon le programme cible fédéral "Développement de la radiodiffusion télévisuelle et radiophonique dans la Fédération de Russie pour 2009-2015", la radiodiffusion numérique est en cours d'introduction en Russie. Le programme est entièrement financé, y compris les fonds iront à la création de satellites multifonctionnels.
Bibliographie
1. Ressource Internet "Histoire des communications par satellite" http://sviazist.nnov.ru/modules/myarticles/article.php?storyid=1026
2.Ressource Internet "Principes d'organisation des communications par satellite" http://vsatinfo.ru/index.php?option=com_sobi2&catid=30&Itemid=0
3. Ressource Internet "Encyclopédie gratuite"
http://en.wikipedia.org
Passer en revue
sur l'abrégé "Systèmes de communication par satellite"
Élèves de 11e Protocole d'entente Parabelskaïa gymnases
Goroshkina Xenia
Le sujet de l'essai est entièrement divulgué. Le matériel de toutes les sections est intéressant, présenté de manière accessible et claire. Bonnes illustrations. La structure du résumé est respectée. L'ouvrage peut être utilisé comme support pédagogique pour les élèves.
Note "EXCELLENT"
Expert: Borisov A. V. Professeur de physique
Questions d'étude :
1. Principes de construction des systèmes de transmission par satellite.
2. Accès multiples.
3. Exigences des documents réglementaires dans la construction et l'application de systèmes de transmission par satellite et par relais radio.
1. Principes de construction des systèmes de transmission par satellite.
Principes de construction des systèmes de transmission par satellite - SSP. Le lancement du premier satellite artificiel de la Terre (AES) le 4 octobre 1957 en Union soviétique a marqué le début de l'exploration de l'espace proche de la Terre. L'une des applications pratiques les plus importantes des satellites est la communication radio spatiale entre stations terriennes (ES), réalisées en relayant des signaux via un ou plusieurs satellites à des fins de communication. Une telle transmission de signal est la base des systèmes de transmission par satellite, qui sont RRL avec une station intermédiaire située sur un satellite. Lors de la construction d'un BSC, les idées et les principes mis en œuvre dans le RRL sont utilisés.
Les systèmes de transmission par satellite présentent un certain nombre de caractéristiques importantes qui les distinguent à la fois du RRL en visibilité directe et du RRL à longue portée. Ainsi, le fonctionnement du BSC est possible en présence d'un certain nombre de sous-systèmes spéciaux. Compte tenu de cela, BSC se distingue comme un type indépendant de systèmes de transmission de messages. Le BSC lui-même, appelé système connecté, comprend un certain nombre de sous-systèmes :
L'Espace, qui comprend un lanceur et un complexe de lancement qui assure le lancement d'un satellite sur l'orbite appropriée ;
Commande et mesure, ayant les parties terrestre et embarquée (installées sur le satellite), conçues pour mesurer les paramètres de l'orbite du satellite et transmettre les commandes de contrôle depuis la Terre ;
La partie télémétrique, émettrice, qui est située à bord du satellite, et la partie réceptrice sur Terre, qui sert à transmettre des données sur l'état de l'équipement du satellite, ainsi que sur le passage des commandes de pression.
Selon la méthode de relais du signal, le SSP est divisé en systèmes avec relais passif et actif.
Un système qui fonctionne sans équipement embarqué est appelé système de communication par satellite passif ou système de relais passif. Dans un tel système, les signaux envoyés depuis la Terre sont réfléchis par la surface du satellite sans amplification préalable. En tant que satellites passifs, à la fois des réflecteurs spéciaux de formes diverses (sous forme de ballons sphériques, de polyèdres volumétriques, etc.) et satellite naturel Terre - Lune.
Avec un gain suffisant des antennes de réception terrestres et une sensibilité élevée du récepteur de la station terrestre (ES), cette méthode de communication radio trouve une application dans les systèmes à faible capacité.
Un système de radiocommunication en présence d'équipements embarqués est appelé système à relais de signal actif, ou système à satellite actif. Dans ce cas, l'alimentation électrique du répéteur embarqué (BR) est réalisée à partir de panneaux solaires situés sur le satellite. Le relais actif est le principal dans les SPS modernes. Un exemple de schéma fonctionnel de communication duplex entre deux stations terriennes (ES) avec retransmission active du signal est illustré à la Fig. 1. Le signal U 1 transmis dans une direction est transmis au modulateur de la station terrienne (Mod ES), ce qui entraîne la modulation de la fréquence porteuse f 1. Ces oscillations de l'émetteur de la station terrienne (Per ES) sont amenées à l'antenne An1 et rayonnées en direction du satellite, où elles sont reçues par l'antenne embarquée BAn du répéteur embarqué (BR) . De plus, des oscillations avec une fréquence f 1 sont envoyées aux filtres de guidage (NF), amplifiées par le premier récepteur du répéteur embarqué (1er PRbr), converties en une fréquence f 2 et envoyées au premier émetteur du répéteur embarqué (1er PERbr). A partir de la sortie de cet émetteur, des oscillations de fréquence f 2 sont transmises par le NF à l'antenne embarquée BAN et rayonnées vers la Terre. Ces fluctuations sont reçues par l'antenne An2 et sont transmises au récepteur de la station terrienne PES et au détecteur de la station terrienne Det ES, à la sortie desquels le signal U 1 est affecté. Transmission du signal ES opposé tu 2 se produit à une fréquence f 3 de manière similaire, et sur le répéteur embarqué, les oscillations avec une fréquence porteuse f C sont converties en oscillations avec une fréquence f 4 .
Les stations terriennes sont connectées aux nœuds de commutation du réseau de communication, avec des sources et des consommateurs de canaux et de chemins typiques, des programmes de télévision et diffusion sonoreà l'aide de lignes au sol.
L'utilisation de satellites connectés pour organiser la diffusion de la télévision et de la radio est très courante et rentable. À l'heure actuelle, la diffusion de télévision et de radio par satellite s'entend à la fois de la transmission de signaux de télévision (avec accompagnement sonore) et de la diffusion de signaux sonores à partir d'un ou plusieurs émetteurs terrestres associés aux centres de formation de programmes de télévision et de radio par satellite vers un réseau de installations de réception terrestres et la distribution de ces programmes afin de les apporter aux abonnés (téléspectateurs ou auditeurs radio) utilisant des moyens de communication terrestres (répéteurs de diverses capacités, systèmes télévision par câble- SKTV, moyen de réception collectif et individuel). En règle générale, dans la zone de service d'un satellite de communication, il existe un réseau de points d'accès de réception de différents types.
Image 1. Schéma structurel radiocommunications par satellite
Selon le type d'ES et l'objectif des systèmes de communication par satellite, les services de radiocommunication suivants sont distingués :
Service fixe par satellite (FSS) - un service de communication radio entre ES situés à certains points fixes, utilisant un ou plusieurs satellites ;
Service mobile par satellite - entre ES mobiles avec la participation d'un ou plusieurs satellites ;
Service de radiodiffusion par satellite (BRSS) - un service de communication radio dans lequel les signaux des répéteurs satellites sont destinés à être reçus directement par le public. Dans le même temps, l'accueil individuel et collectif dans des installations relativement simples et peu coûteuses avec la qualité appropriée est considéré comme direct.
Les orbites des satellites terrestres artificiels connectés sont les trajectoires du mouvement des satellites dans l'espace. Ils sont déterminés par de nombreux facteurs, dont le principal est l'attraction du satellite par la Terre.
Un certain nombre d'autres facteurs: la décélération du satellite dans l'atmosphère terrestre, l'influence de la Lune, du Soleil, des planètes - affectent également l'orbite du satellite. Cette influence est très faible et est prise en compte sous la forme de ce qu'on appelle la perturbation de l'orbite du satellite, c'est-à-dire écarts de la trajectoire réelle par rapport à l'idéal, calculés en supposant que le satellite se déplace uniquement sous l'influence de la gravité vers la Terre. La Terre étant un corps de forme complexe avec une répartition inégale de la masse, il est difficile de calculer la trajectoire idéale. En première approximation, on considère que le satellite se déplace dans le champ gravitationnel de la Terre sphérique avec une distribution de masse à symétrie sphérique. Un tel champ gravitationnel est appelé central. Les principaux paramètres caractérisant le mouvement d'un satellite artificiel peuvent être déterminés à l'aide des lois de Kepler.
Appliquées aux satellites de la Terre, les lois de Kepler sont formulées comme suit :
Première loi de Kepler : l'orbite du satellite de la Terre se situe dans un plan fixe passant par le centre de la Terre, et est une ellipse dont l'un des foyers est le centre de la Terre.
Deuxième loi de Kepler : le rayon vecteur d'un satellite (un segment de droite reliant un satellite en orbite et le centre de la Terre) décrit des aires égales dans des intervalles de temps égaux.
Troisième loi de Kepler : le rapport des carrés des périodes orbitales des satellites est égal au rapport des cubes des demi-grands axes des orbites.
Les systèmes de communication peuvent utiliser des satellites se déplaçant sur des orbites qui diffèrent par les paramètres suivants : forme (circulaire ou elliptique) ; hauteur au-dessus de la surface de la Terre H ou distance du centre de la Terre ; l'inclinaison, c'est-à-dire angle φ entre le plan équatorial et le plan de l'orbite. Selon l'angle φ choisi, les orbites sont divisées en orbites équatoriale (φ = 0), polaire (φ = 90°) et inclinée (0< φ < 90°). Эллиптические орбиты, кроме того, характеризуются апогеем и перигеем, т.е. расстояниями от Земли, соответственно, до наиболее удаленной и до ближайшей точки орбиты. Апогей и перигей орбиты являются концами большой оси эллипса, а линия, на которой они находятся, называется осью апсид. При высоте орбиты 35 800 км период обращения ИСЗ будет равен земным суткам. Экваториальная круговая орбита с высотой 35 800 км при условии, что направление движения спутника совпадает с направлением вращения Земли относительно своей оси (с запада на восток), называется геостационарной орбитой (ГСО). Такая орбита является универсальной и единственной. Спутник, находящийся на ней, будет казаться земному наблюдателю неподвижным. Подобный ИСЗ называется геостационарным. В действительности ИСЗ, математически точно запущенный на ГСО, не остается неподвижным, а из-за эллиптичности Земли и по причине возмущения орбиты медленно уходит из заданной точки и совершает периодические (суточные) колебания по долготе и широте. Поэтому на ИСЗ должна быть установлена система автоматической стабилизации и удержания его в заданной точке ГСО.
La plupart des SSP modernes sont basés sur des satellites géostationnaires. Cependant, dans certains cas, des orbites elliptiques très allongées présentent un intérêt, ayant les paramètres suivants : angle d'inclinaison φ = 63,5°, hauteur à l'apogée environ 40 000 km, au périgée environ 500 km. Pour la Russie, avec son vaste territoire au-delà du cercle polaire arctique, une telle orbite est très pratique. Le satellite qui lui est lancé tourne de manière synchrone avec la Terre, a une période de révolution de 12 heures et, effectuant deux orbites complètes par jour, apparaît au-dessus des mêmes régions de la Terre au même moment. La durée d'une session de communication entre les points d'accès situés sur le territoire de la Russie est de 8 heures.Pour assurer une communication 24 heures sur 24, il est nécessaire de lancer 3 ... 4 satellites sur des orbites elliptiques, dont les avions se déplacent mutuellement, formant un système de satellites.
Récemment, il y a eu une tendance à utiliser des satellites de communication situés sur des orbites basses (la distance à la Terre est de 700 ... 1500 km). Les systèmes de communication utilisant des satellites artificiels en orbite basse, en raison de la distance nettement plus courte (près de 50 fois) entre la Terre et le satellite, présentent un certain nombre d'avantages par rapport au SSS sur les satellites géostationnaires. Premièrement, il s'agit d'un retard et d'une atténuation plus petits du signal transmis, et deuxièmement, d'un lancement plus facile des satellites en orbite. Le principal inconvénient de tels systèmes est la nécessité de lancer un grand nombre de satellites en orbite pour assurer des communications ininterrompues à long terme. Cela est dû à la faible zone de visibilité d'un satellite séparé, ce qui complique la communication entre abonnés situés à grande distance les uns des autres. Par exemple, complexe spatial"lridium" (USA) se compose de 66 engins spatiaux placés sur des orbites circulaires avec une inclinaison φ = 86° et une hauteur de 780 km. Les satellites sont placés dans des plans orbitaux, dans chacun il y a 11 satellites en même temps. La distance angulaire entre les plans orbitaux adjacents est de 31,6°, sauf pour les 1er et 6ème plans, dont la séparation angulaire est d'environ 22°.
Le système d'antenne de chaque satellite forme 48 faisceaux étroits. L'interaction de tous les satellites fournit une couverture mondiale de la Terre avec des services de communication. Dans notre pays, des travaux sont en cours pour créer nos propres systèmes de communication par satellite en orbite basse "Signal" et "Gonets".
Pour comprendre les caractéristiques du fonctionnement des systèmes de satellites en orbite basse, considérons le schéma de passage des signaux (Figure 2). Dans ce cas, deux antennes (A 1 et A 2) doivent être installées sur chaque ES, qui peut émettre et recevoir des signaux en utilisant l'un des satellites situés dans la zone de communication mutuelle. La figure 2 montre des satellites se déplaçant dans le sens des aiguilles d'une montre sur une seule orbite basse, dont une partie est représentée par des arcs mn. Le système de communication par satellite considéré fonctionne comme suit. Le signal de l'AP 1 à travers l'antenne A 1 va à l'IS3 4 et est relayé à travers l'IS3 3 , IS3 2 , IS3 1 à l'antenne de réception A 2 AP 2 . Ainsi, dans ce cas, les antennes A 1 et un segment d'orbite contenant IS3 4 - satellite 1 sont utilisés pour relayer le signal. Lorsque IS3 4 quitte la zone à gauche de la ligne d'horizon a-a ’ , l'émission et la réception du signal seront effectuées par les antennes A 2 et un segment d'orbite contenant IS3 5 ... IS3 2, etc.
Comme chaque satellite peut être observé depuis une zone assez large de la surface de la Terre, il est possible de communiquer entre plusieurs satellites par l'intermédiaire d'un satellite commun. Dans ce cas, le satellite est "disponible" pour de nombreux ES, un tel système est donc appelé un système de communication par satellite à accès multiple.
L'utilisation de satellites se déplaçant en orbite à basse altitude simplifie l'équipement ES, car il est possible de réduire le gain des antennes terrestres, la puissance de l'émetteur et de travailler avec des récepteurs de sensibilité inférieure à celle des satellites géostationnaires. Cependant, dans ce cas, le système de contrôle du déplacement d'un grand nombre de satellites en orbite devient plus compliqué.
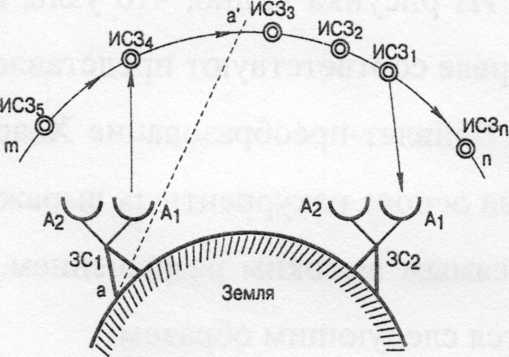
Figure 2. Système de communication avec plusieurs satellites en orbite basse
Un système de communication basé sur 840 satellites de communication en orbite basse équipés de systèmes d'antennes à balayage à gain élevé est en cours de développement, couvrant toute la surface de la Terre avec un réseau de 20 000 grandes zones de service, chacune composée de 9 petites zones. Les satellites seront connectés au réseau de télécommunications terrestre par des satellites à haute performance. Cependant, eux-mêmes satellites en orbite basse formeront un réseau indépendant, où chacun d'eux échangera des données avec neuf voisins en utilisant des canaux de communication inter-satellites de haute qualité. Cette structure hiérarchique doit rester opérationnelle en cas de pannes de satellites individuels, en cas de surcharges locales et de panne d'une partie des moyens de communication avec l'infrastructure au sol.
Transmission de signaux dans le SSP. Contrairement à d'autres systèmes de transmission fonctionnant dans la gamme des micro-ondes, dans les systèmes par satellite, le signal radio parcourt des distances considérables, ce qui détermine un certain nombre de caractéristiques, notamment le décalage de fréquence Doppler, le retard du signal, la discontinuité des valeurs de retard et le décalage de fréquence Doppler.
On sait que le déplacement relatif d'une source de signal avec une fréquence f avec une vitesse v p<< с вызывает доплеровский сдвиг ![]() , où c est la vitesse de propagation des oscillations électromagnétiques ; le signe "+" correspond à une diminution de la distance entre la source du signal et le récepteur du signal, et "-" - à une augmentation.
, où c est la vitesse de propagation des oscillations électromagnétiques ; le signe "+" correspond à une diminution de la distance entre la source du signal et le récepteur du signal, et "-" - à une augmentation.
Lors de la transmission d'oscillations modulées, la fréquence de chaque composante spectrale change de 1 + (v p /c) fois, c'est-à-dire les composants avec une fréquence plus élevée reçoivent un changement de fréquence plus important, et ceux avec une fréquence plus basse en reçoivent un plus petit. Ainsi, l'effet Doppler conduit à un transfert du spectre du signal de la valeur ∆f don et à un changement d'échelle du spectre de 1 + +(v p /c) fois, c'est-à-dire à sa déformation.
Pour les satellites géostationnaires, le décalage Doppler est négligeable et n'est pas pris en compte. Pour les orbites elliptiques très allongées (orbites de type Lightning), la valeur maximale du décalage Doppler pour la liaison descendante dans la bande 4 GHz est de 60 kHz, ce qui conduit à devoir le compenser, par exemple, selon un programme pré-calculé . Il est plus difficile de compenser les déformations du spectre. Pour ce faire, les appareils peuvent être utilisés soit avec un retard contrôlé variable d'un signal de groupe ou micro-ondes, qui est modifié en fonction du programme, soit en contrôlant les fréquences de la conversion de groupe de l'équipement de formation de canaux des systèmes de transmission avec division de fréquence de canaux.
2. Accès multiple
Les répéteurs installés sur les satellites de communication, comme dans le RRSP en visibilité directe, sont des dispositifs émetteurs-récepteurs à plusieurs barillets. Le nombre de troncs dans les SSP modernes peut atteindre 24 ou plus. Dans ce cas, en règle générale, toute la bande de fréquences attribuée dans cette plage est utilisée. Lors de la transmission de signaux de différents points d'accès vers différents troncs, aucun problème ne survient généralement. Si les signaux de différents ES sont transmis sur une jonction de répéteur, alors une telle utilisation de jonctions est appelée accès multiple (MA). Il vous permet de créer un réseau de communication dans lequel un tronc d'un transpondeur satellite permet d'organiser simultanément à la fois des systèmes de transmission monocanal et multicanal avec une station centrale et des systèmes de communication de type "chacun avec chacun". Dans les systèmes satellitaires, contrairement aux systèmes multicanaux terrestres, le signal de groupe est formé par des stations terriennes directement à l'entrée du répéteur, et dans la gamme des micro-ondes.
Les principales exigences pour le système MD sont les suivantes : utilisation efficace de la puissance du répéteur et des bandes de fréquences maximales du répéteur ; niveau de diaphonie admissible ; flexibilité du système.
Pour que le MD réponde à ces exigences, il est nécessaire de trouver un ensemble de signaux orthogonaux ou proches d'orthogonaux. Il existe trois manières de former un tel ensemble, basées sur la séparation des signaux par fréquence, temps et forme. Conformément à ces procédés, on distingue les types de DM suivants : avec division de fréquence des signaux (FDMA) ; avec division temporelle des signaux (TDVR); avec la séparation des signaux sous forme (MDRF). Des variétés et des combinaisons de ces méthodes sont utilisées.
Accès multiple avec division de fréquence des signaux. Avec FDMA, chaque signal ES a une certaine section du spectre de fréquence hyperfréquence total du groupe. Tous sont transmis simultanément et le signal de groupe passant par le répéteur satellite est formé de signaux non seulement de canaux individuels (par exemple, fréquence vocale), mais également de groupes de canaux. Il est possible d'utiliser différents types de modulation. Le spectre du signal de groupe avec FDMA est représenté sur la figure 3. Ici, sur chaque ES, le signal formé par un ou un groupe de canaux espacés en fréquence module sa porteuse fH. À certaines valeurs des porteuses à l'entrée du répéteur dans la bande passante du tronc ∆fp dans la gamme des micro-ondes, un signal de groupe est formé. Les valeurs des fréquences porteuses et de l'écart de fréquence sont choisies de telle sorte que des intervalles de garde ∆f 3 restent entre les spectres des signaux pour réduire les interférences mutuelles entre les signaux.
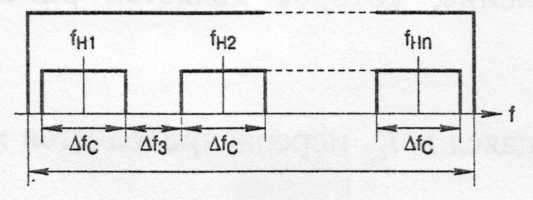
Figure 3. Spectre du signal de groupe avec FDMA
La transmission de signaux pendant FDMA entraîne une diminution de la puissance de sortie totale du répéteur, une suppression mutuelle des signaux, l'apparition d'une diaphonie due à la non-linéarité de la caractéristique d'amplitude du répéteur et à la présence dans le répéteur d'éléments qui convertissent modulation d'amplitude en modulation de phase.
L'efficacité du FDMA diminue considérablement par rapport au mode à signal unique. Ainsi, lors de la transmission de signaux de 10 ES via un répéteur, seuls 10 canaux de fréquence de tonalité (TFC) peuvent être transmis sur chaque porteuse, c'est-à-dire seulement 100 CFC, et s'il y a 55 ES sur chaque porteuse, un seul CFC peut être transmis.
Les avantages du FDMA sont la simplicité de l'équipement et sa compatibilité avec la plupart des équipements de conversion de canal utilisés.
Une variante de FDMA est l'accès multiple porteuse par canal, qui est une combinaison de méthodes de signalisation qui prend en compte les statistiques d'un message multicanal dans les systèmes avec des canaux non dédiés.
Étant donné que l'activité du CFC est de 25 ... 30% du temps pendant lequel il est occupé, alors en désactivant les oscillations de la porteuse pendant les pauses de la conversation, il est possible de réduire la charge moyenne du répéteur avec des signaux ES ou, avec la même charge, augmenter le nombre d'ES dans le système. Dans les systèmes avec porteuses désactivées, il est possible d'augmenter leur efficacité d'un facteur 3 lors de l'utilisation de porteuses FM ; lors de l'utilisation d'autres types, il est possible d'augmenter encore l'efficacité du système MD.
Le système dans lequel le signal de chaque CFC est transmis sur une porteuse distincte est appelé porteuse par canal. Ce système diffère en ce que l'attribution de canaux et l'établissement d'une communication entre un couple d'abonnés nécessite la présence d'un canal de service et d'un système de contrôle avec un ES de contrôle spécialement dédié à cet effet.
Accès multiple avec division du signal dans le temps. Le développement intensif des systèmes de transmission numérique a conduit à la création de systèmes avec TDMA. Dans de tels systèmes, chaque ES se voit attribuer un certain intervalle de temps périodiquement répété pour l'émission de signaux, dont la durée est déterminée par le trafic de la station. L'intervalle de temps pendant lequel toutes les stations du réseau émettent un signal une fois est appelé une trame, et la durée de la rafale d'impulsions émises par une station est appelée une sous-trame. Les intervalles de temps de rayonnement de tous les points d'accès doivent être mutuellement synchronisés afin que les signaux ne se chevauchent pas. Pour cela, une partie de la bande passante du tronc est allouée à la transmission des signaux de synchronisation trame (trame).
Dans la plupart des cas, le signal de synchronisation est utilisé sous la forme d'un package spécialisé séparé - un signal de synchronisation dédié. Dans ce cas, les signaux de synchronisation de tous les ES sont transmis dans une trame à des positions temporelles fixes séparément des paquets d'informations. La structure et la durée des signaux de synchronisation de trame sont constantes, tandis que l'emplacement et la durée des paquets d'informations peuvent changer en fonction du trafic de l'ES.
Avec TDMA, le répéteur est calculé pour une puissance proche du maximum, puisqu'un seul signal ES le traverse à la fois et qu'il n'y a pas de diaphonie, ce qui est l'une des principales raisons de la réduction du débit du système.
La figure 4 montre un exemple d'une trame de système TDMA. Il ressort de la figure que l'efficacité de l'utilisation de la bande passante du tronc pour TDMA est déterminée par la nécessité d'introduire certains intervalles de temps de garde t 3 qui garantissent l'absence de chevauchement de signaux pendant le fonctionnement instable de la synchronisation inter-centraux, ainsi que la besoin d'introduire un certain nombre de signaux supplémentaires, y compris des signaux de synchronisation. Conformément à cela, l'efficacité du système avec TDMA est égale à
où est la durée du signal de cadrage ; - durée du signal de synchronisation de sous-trame ; - durée de la trame ; n- nombre de canaux du système. Il découle de cette formule que pour améliorer l'efficacité du système, il convient d'augmenter la durée de la trame, de réduire la longueur et le nombre d'intervalles de garde et d'améliorer la précision de la synchronisation. Étant donné que la durée des trames pour la communication vocale est déterminée par le théorème de Kotelnikov-Nyquist et, par conséquent, par la fréquence maximale du signal transmis (par exemple, = 125 μs est généralement utilisé pour CFC), il est nécessaire d'introduire une mémoire tampon pour l'augmenter, à la suite de quoi le retard des informations transmises augmente. Afin de réduire la capacité de la mémoire tampon à transmettre des informations à une station donnée, plusieurs intervalles de sous-trames peuvent être prévus, régulièrement espacés dans la trame. Dans ce cas, des pertes de débit sont inévitables en raison d'une augmentation du nombre d'intervalles de garde.
Accès multiple avec séparation des signaux par forme. Les systèmes MFDS utilisent couramment des signaux de type bruit (NLS) et sont également appelés large bande, base large ou composite. Contrairement aux signaux conventionnels, pour lesquels la base est B = ≈ 1, où est la bande passante du signal et a est sa durée, pour NPS B >> 1. Cette transformation équivaut à élargir le spectre en n fois et l'augmentation correspondante de la base du signal.
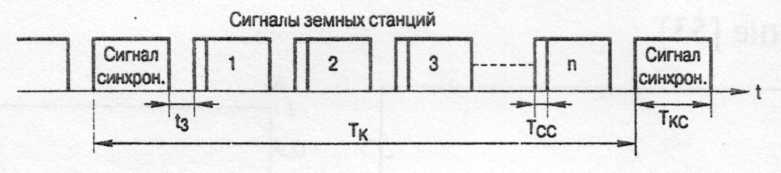
Figure 4. Structure de trame d'un système TDMA
Lors de la transmission sur un canal satellite, le NPS est transféré dans la région des micro-ondes. Si les NPS de différents canaux ne se chevauchent pas complètement ou partiellement en temps et en fréquence, alors à la réception, ils traitent de la séparation des NPS en temps et en fréquence, respectivement. Si les signaux se chevauchent complètement ou partiellement à la fois en temps et en fréquence, alors les signaux sont séparés en forme. Par conséquent, les signaux des différents canaux doivent être orthogonaux au sens le plus large. Cette affaire est du plus haut intérêt.
Lors du traitement du NPS reçu, il est nécessaire de prendre en compte l'alternance d'impulsions de polarités différentes, c'est-à-dire comment "plier" le signal. Dans ce cas, le dispositif récepteur doit être cohérent avec la structure du NSS et synchronisé avec celle-ci. Il s'ensuit que le NPS, qui a une structure (forme) différente, sera perçu par cet appareil récepteur comme une interférence. La qualité de la transmission des informations dans un tel système est déterminée par les interférences mutuelles entre les signaux des abonnés - le bruit de non-orthogonalité, qui augmente à mesure que le nombre d'abonnés travaillant simultanément augmente. Si les abonnés sont égaux, la qualité de la communication ne peut pas être améliorée en augmentant la puissance du BSS. Cette circonstance conduit à la nécessité d'augmenter la base NPS et de compliquer le traitement du signal côté réception, ce qui entraîne la complexité de l'équipement.
Lors de l'établissement d'une communication entre abonnés dans un système avec un NLS, il est nécessaire de rechercher et de régler automatiquement la fréquence porteuse du signal reçu, ainsi que de rechercher et d'ajuster l'heure de son arrivée. Dans les systèmes de transmission par satellite (STS), l'influence de l'ensemble des signaux d'autres abonnés sur l'appareil de réception d'un abonné donné se manifeste par une interférence de fluctuation supplémentaire.
Dans un accès multiple basé sur NLS, le nombre d'abonnés ne peut pas être important. Une augmentation du nombre d'abonnés actifs entraîne la nécessité d'augmenter la base de signal. En réalité, c'est plusieurs dizaines.
Développement de systèmes d'accès multiples . Lorsque des antennes spéciales sont installées sur des satellites sous la forme de réseaux dits phasés qui permettent un changement rapide de l'orientation du rayonnement, il est possible de mettre en œuvre un accès multiple spatial, qui doit être combiné avec TDMA, il est possible de traiter des signaux à bord d'un satellite, qui fait référence à une large classe de transformations des signaux relayés, depuis leur commutation jusqu'à la démodulation et la séparation complètes. L'idée de l'accès multiple avec commutation de signaux est que, en plus des répéteurs, un dispositif de commutation est installé à bord du satellite, qui assure la transmission des signaux reçus du SES uniquement aux stations auxquelles ces signaux sont adressés (contrairement répéteurs conventionnels qui transmettent des signaux à toute la surface irradiée de la Terre) . A titre d'exemple des différents types de conversions, on peut citer la manière dont plusieurs porteuses modulées en phase sont transmises sur des satellites en utilisant la méthode FDMA. Ces porteuses sont démodulées, combinées dans le temps et modulent la porteuse transmise du satellite à l'ES, où elle est démodulée et les signaux sont séparés dans le temps.
Il est possible de transmettre des NLS au satellite, de les "plier", de les combiner et de les transmettre à l'ES par des méthodes classiques. Avec cette conversion de signaux à bord du satellite, le débit augmente du fait du transfert des réserves d'énergie sur le lien montant et de son gain sur le lien descendant.
Principes de construction des systèmes de télédiffusion par satellite. Transmission de signaux de télévision via des lignes de communication par satellite. La création d'un vaste réseau de diffusion centrale de télévision (TV) n'est devenue possible qu'avec l'aide de satellites connectés. Nous envisagerons la construction de STV sur les organismes de télévision dans le système de communication par satellite Orbita-2 utilisant des satellites de type Molniya ou des satellites géostationnaires de type Gorizont.
Dans le système Orbita-2, la réception satellite est effectuée dans la bande 6 GHz, la transmission en direction de la Terre - dans la bande 4 GHz. La FM est utilisée avec une déviation de 15 MHz, le signal audio est transmis sur une fréquence de sous-porteuse de 7 MHz avec une déviation de fréquence de 150 kHz. Sur les fréquences de sous-porteuse de 7,5 et 8,2 MHz, des signaux de diffusion audio et des images de bandes de journaux (GPI) sont transmis. Les signaux GPI sont transmis pour assurer l'impression décentralisée des journaux nationaux. En pratique, la déviation du signal porteur de la sous-porteuse du RSI est d'environ 1,5 MHz.
Le schéma fonctionnel d'un répéteur satellite actif de type "Lightning" est représenté sur la figure 5. Le répéteur fonctionne de la manière suivante. Le signal reçu par l'antenne An avec une fréquence entre dans le filtre RF croisé puis dans le convertisseur de fréquence FC-1. La deuxième entrée de la FI reçoit un signal de l'oscillateur local. Ensuite, le signal converti avec une fréquence est amplifié par l'amplificateur de fréquence intermédiaire IF-1 et envoyé au deuxième convertisseur de fréquence IF-2, qui fonctionne en conjonction avec l'oscillateur local de l'émetteur. À la sortie de l'IF-2, un signal radio avec une fréquence est formé. Ce signal est amplifié en puissance par l'amplificateur PA et est transmis à travers le filtre de croisement RF et l'antenne An en direction de la Terre.
Pour suivre les satellites dans la station de réception, des antennes paraboliques d'un diamètre de miroir de 12 m sont utilisées, montées sur un dispositif de support à rotation complète. En général, l'AP est une structure assez complexe et coûteuse.
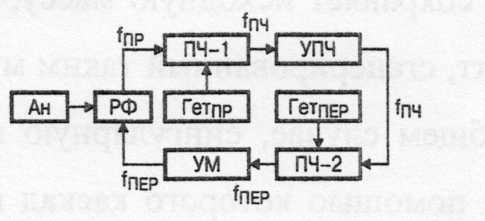
Figure 5. Schéma structurel d'un répéteur satellite actif de type "Lightning"
À ce jour, environ 90 stations de réception Orbita ont été construites en Russie. Le réseau de réception du système Orbita-2 est un réseau de distribution indirect, c'est-à-dire les stations au sol reçoivent un signal TV via un satellite et le transmettent via des lignes de connexion terrestres aux centres de télévision les plus proches ou à des répéteurs puissants, qui les amènent aux abonnés dans la gamme des ondes métriques ou décimétriques. Le fonctionnement du système Orbita-2 n'a montré son efficacité que dans les grandes colonies.
Afin d'augmenter l'efficacité économique, le système de transmission par satellite d'Ekran a été mis en service, en utilisant des satellites situés en orbite géostationnaire (GSO).
Pour étendre la zone de service sans risque d'interférence avec les services terrestres, le système de satellites Moskva a été mis en service. Les signaux de télévision sont acheminés vers le réseau de stations de réception terrestres par l'intermédiaire d'un satellite géostationnaire.
La création d'un réseau de télévision multi-programmes moderne est impossible sur la base des systèmes Orbita-2, Ekran, Moskva. Par conséquent, la perspective de la télévision utilisant des satellites est la diffusion télévisuelle directe (NTV) utilisant la gamme de fréquences la plus avantageuse économiquement de 11,7 ... 12,5 GHz. Des réseaux STV nationaux multiprogrammes sont en cours de création dans cette bande de fréquences. Actuellement, en Russie pour NTV, une série de satellites connectés de type GALS est en cours de lancement sur l'OSG.
3. Exigences des documents réglementaires dans la construction et l'utilisation des systèmes de transmission par satellite et par relais radio.
La question pédagogique est présentée à part dans l'annexe à ce cours magistral.
Questions de contrôle :
1. Nommez les principes de base de la construction de systèmes de transmission par satellite.
2. Nommez les orbites des satellites artificiels de la Terre (AES) connectés et donnez leur analyse comparative.
3. L'essence de l'accès multiple. Classification des méthodes d'accès multiple.
4. Nommez les principaux éléments du schéma de la station terrienne émettrice de télévision par satellite et indiquez leur objectif.
5. Nommez les principaux éléments du circuit répéteur satellite actif et indiquez leur objectif.
6. Nommez les principaux éléments et leur objectif du système de réception des signaux radio de télévision par satellite.
6.1. Concept de télédétection de la Terre
La télédétection de la Terre (ERS) est une étude sans contact de la Terre, de sa surface, de l'espace proche de la surface et du sous-sol, des objets individuels, des processus dynamiques et des phénomènes en enregistrant et en analysant leur propre rayonnement électromagnétique ou réfléchi. L'enregistrement peut être effectué à l'aide de moyens techniques installés sur des aéronefs et des engins spatiaux, ainsi qu'à la surface de la Terre, par exemple, lors de l'étude de la dynamique des processus d'érosion et de glissement de terrain, etc.
La télédétection, en plein développement, s'est imposée comme une direction indépendante dans l'utilisation des images. La relation entre les principales directions d'utilisation des images et les noms des directions peut être représentée par un schéma (Fig. 34).
Riz. 34. Schéma de la relation entre les principaux processus d'obtention et de traitement des images
Actuellement, la plupart des données télédétection La Terre est reçue des satellites terrestres artificiels (AES). Les données de télédétection sont des images aérospatiales présentées sous forme numérique sous la forme d'images matricielles, de sorte que le problème du traitement et de l'interprétation des données de télédétection est étroitement lié au traitement numérique des images.
Les données d'imagerie satellitaire sont devenues accessibles à un large éventail d'utilisateurs et sont activement utilisées non seulement à des fins scientifiques, mais aussi à des fins industrielles. La télédétection est l'une des principales sources de données actualisées et opérationnelles pour les systèmes d'information géographique (SIG). Les réalisations scientifiques et techniques dans le domaine de la création et du développement de systèmes spatiaux, des technologies d'obtention, de traitement et d'interprétation des données ont considérablement élargi l'éventail des tâches résolues à l'aide de la télédétection. Les principaux domaines d'application de la télédétection depuis l'espace sont l'étude de l'état de l'environnement, l'occupation des sols, l'étude des communautés végétales, l'évaluation des rendements des cultures, l'évaluation des conséquences des catastrophes naturelles, etc.
6.2. Applications des données de télédétection
L'utilisation d'images satellites peut être effectuée pour résoudre cinq problèmes.
1. Utiliser une image comme une simple carte, ou plutôt comme une base sur laquelle des données provenant d'autres sources peuvent être appliquées en l'absence de cartes plus précises qui reflètent la situation actuelle.
2. Définition des limites spatiales et de la structure des objets pour déterminer leur taille et mesurer les surfaces correspondantes.
3. Inventaire des objets spatiaux dans une certaine zone.
4. Évaluation de l'état du territoire.
5. Quantification de certaines propriétés de la surface terrestre.
La télédétection est une voie prometteuse pour la constitution de bases de données dont la résolution spatiale, spectrale et temporelle suffira à résoudre les problèmes d'utilisation rationnelle des ressources naturelles. La télédétection est une méthode efficace pour inventorier les ressources naturelles et surveiller leur état. Puisque la télédétection permet d'obtenir des informations sur n'importe quelle zone de la Terre, y compris la surface des mers et des océans, la portée de cette méthode est vraiment illimitée. La base de l'exploitation des ressources naturelles est l'analyse des informations sur l'utilisation des terres et l'état de la couverture terrestre. Outre la collecte de ces informations, la télédétection est également utilisée pour étudier les catastrophes naturelles telles que les tremblements de terre, les inondations, les glissements de terrain et les affaissements.