Produits de l'Institut de recherche KP. Principes de fonctionnement d'un navigateur GPS
Ces dernières années ont été caractérisées par la mise en œuvre à grande échelle des technologies satellitaires. technologies de navigation et équipement navigation par satellite dans presque tous les domaines d'activité. L'utilisation obligatoire des équipements GLONASS ou GLONASS/GPS lors de l'exécution des types d'activités de transport concernés, y compris la présence d'exigences obligatoires pour l'équipement lui-même, a rendu très urgent le problème de l'établissement de formulaires pour évaluer sa conformité aux exigences établies. Cependant, résoudre ce problème se heurte souvent à certaines difficultés. Cet article est consacré à l'analyse d'un certain nombre d'aspects de ce problème.
Des exemples de dispositifs à cardan à sortie aléatoire sont les gyroscopes de référence d'orientation, utilisés pour déterminer ou mesurer le pas, le rouleau, le centre de gravité du rotor peut être dans une position fixe. Certains gyroscopes ont des équivalents mécaniques qui sont remplacés par un ou plusieurs éléments, par exemple un rotor en rotation peut être suspendu dans un fluide plutôt que articulé sur des cardans. Dans certains cas particuliers, le joint universel extérieur peut être abaissé de manière à ce que le rotor ait deux degrés de liberté.
L'utilisation la plus répandue des équipements de navigation par satellite est observée dans le complexe des transports et, en particulier, dans les transports terrestres. Les appareils de navigation installés sur des véhicules de différentes classes sont largement utilisés dans les systèmes de surveillance et de répartition pour le transport de passagers et de marchandises spéciales et dangereuses. Il est prévu d'utiliser cet équipement dans le système d'intervention d'urgence en cas d'accident (ERA-GLONASS), ainsi que dans le système de perception des péages sur les routes fédérales pour les poids lourds d'un poids maximum autorisé supérieur à 12 tonnes. Les appareils de navigation sont également utilisés dans les systèmes de surveillance des horaires de travail et de repos des conducteurs (systèmes de contrôle du tachygraphe) ; télématique d’assurance (assurance « intelligente »), etc.
Essentiellement, un gyroscope est une toupie combinée à une paire de cardans. Les toupies ont été inventées dans de nombreuses civilisations différentes, notamment la Grèce classique, Rome et la Chine. Dans un cadre de référence approprié, il peut être défini comme le changement du premier angle d'Euler, en d'autres termes, si l'axe de rotation d'un corps lui-même tourne autour d'un deuxième axe, on dit que ce corps précession autour du deuxième axe. Le mouvement dans lequel le deuxième angle d'Euler change est appelé nutation, en physique il existe deux types de précession, sans couple et avec mouvement de rotation.
En astronomie, la précession fait référence à l'un des nombreux changements dans les paramètres des corps astrophysiques en rotation ou en orbite. Un exemple important est le changement d’orientation de l’axe de rotation de la Terre. Aucune précession sans couple signifie qu'aucun couple n'est appliqué au corps. Avec une précession ininterrompue, l’élan est constant. Ce qui rend cela possible, c'est le moment d'inertie, pour être précis. La matrice inertielle est constituée des moments d'inertie du corps, calculés le long des axes de coordonnées. Si l'objet est asymétrique par rapport à son axe de rotation.
Dans une large mesure, l'essor de la navigation dans les transports est dû au fait qu'une part assez importante du marché des transports basé sur l'utilisation d'équipements ou de GLONASS/GPS est désormais réglementée par le gouvernement. Ainsi, en 2008, le décret gouvernemental russe N641 a déterminé les types de véhicules qui doivent être équipés d'un équipement de navigation par satellite GLONASS ou GLONASS/GPS.
En conséquence, la composante de vitesse du corps autour de chaque axe changera inversement avec chaque moment d'inertie de l'axe. La précession induite par le couple est le phénomène dans lequel l'axe d'un objet en rotation décrit un cône dans l'espace lorsqu'un couple lui est appliqué. Ce phénomène est visible dans le pivotement. Si la vitesse de rotation et l'amplitude du couple externe sont constantes, l'axe de rotation se déplacera perpendiculairement à la direction qui sera intuitivement déterminée par le couple externe.
Dans le cas d'un dessus de jouet, son poids agit vers le bas à partir de son centre de masse, et ces deux forces opposées créent un couple qui provoque la précession du dessus. Le dispositif représenté à droite est monté sur une corniche, de l'intérieur vers l'extérieur il y a trois axes de rotation, un moyeu de roue, un axe à cardan et un joint vertical. Pour différencier les deux essieux, la rotation autour du moyeu de roue sera appelée roulage, tandis que la rotation autour de l'axe de l'arbre de transmission sera appelée tangage. Le domaine de la navigation comprend quatre catégories : navigation terrestre, navigation maritime, navigation aérienne.
Par la suite, l'obligation d'équiper les véhicules d'équipements GLONASS lors du transport de passagers, de marchandises spéciales et dangereuses a été inscrite de jure dans la loi fédérale « sur les activités de navigation ».
L'exigence d'équipement obligatoire des véhicules avec un équipement de navigation par satellite est également inscrite dans les actes juridiques réglementaires sur la sécurité des transports terrestres (routiers et ferroviaires) et maritimes (règlements techniques - nationaux et Union douanière), qui déterminent la procédure de libération des véhicules pour divers fins en circulation. En outre, elles se reflètent dans les réglementations établissant des exigences pour les véhicules déjà en circulation. Dans le même temps, le Règlement technique de l'Union douanière « Sur la sécurité des véhicules à roues », outre les normes relatives à l'équipement des véhicules en équipements de navigation par satellite à diverses fins, établit également les exigences de base pour l'équipement lui-même.
C'est également un terme technique utilisé pour désigner les connaissances spécialisées utilisées par les navigateurs pour effectuer des tâches de navigation. Toutes les techniques de navigation impliquent de placer la position des navigateurs par rapport à des emplacements ou des modèles connus. La navigation, dans un certain sens, peut faire référence à toute compétence ou exploration impliquant la détermination de la position et de la direction. En ce sens, la navigation comprend l'orientation et la navigation piétonne. Pour plus d'informations sur les différentes stratégies de navigation utilisées par les gens, visitez Human Navigation.
Les normes et exigences spécifiées sont également prévues dans les règlements techniques nationaux, un projet de résolution du gouvernement de la Fédération de Russie sur les modifications dont les procédures établies sont soumises à l'approbation des autorités exécutives fédérales intéressées. Sous une forme plus détaillée, les exigences relatives aux équipements de navigation par satellite sont reflétées dans l'arrêté du ministère des Transports de Russie du 31 juillet 2012 n° 285.
Au cours de la période médiévale européenne, la navigation était considérée comme faisant partie de l'ensemble des sept arts mécaniques. Les premiers Polynésiens du Pacifique utilisaient le mouvement des étoiles, la météo, la position de certains types d'animaux sauvages ou la taille des vagues pour se frayer un chemin d'une île à l'autre. un autre, la navigation maritime utilisant instruments scientifiques, comme l'astrolabe des marins, apparu pour la première fois en Méditerranée au Moyen Âge, l'amélioration de cet instrument de navigation est attribuée aux navigateurs portugais lors des premières découvertes portugaises de l'ère des découvertes.
L'utilisation obligatoire des équipements GLONASS ou GLONASS/GPS lors de l'exécution des types d'activités de transport concernés, y compris la présence d'exigences obligatoires pour l'équipement lui-même, a rendu très urgent le problème de l'établissement de formulaires pour évaluer sa conformité aux exigences établies. Cependant, résoudre ce problème se heurte souvent à certaines difficultés.
Trinidad a navigué vers l'est des Philippines, essayant de trouver un chemin pour retourner en Amérique. En gros, la latitude d'un lieu sur Terre est sa distance angulaire au nord ou au sud de l'équateur, latitude généralement exprimée en degrés de 0° à l'équateur à 90° aux pôles nord et sud. L'altitude de Polaris en degrés au-dessus de l'horizon est la latitude de l'observateur, semblable à la latitude, la longitude d'un endroit sur Terre est la distance angulaire est ou ouest du méridien d'origine ou méridien de Greenwich. La longitude est généralement exprimée en degrés de 0° au méridien de Greenwich à 180° est et ouest, par exemple Sydney est à environ 151° de longitude est.
L'une des caractéristiques fonctionnelles des équipements de navigation par satellite est la précision de la détermination des coordonnées de localisation et de la vitesse de déplacement de l'objet de navigation sur lequel il est installé. Partant de là, toutes les difficultés du problème considéré dans la pratique nationale de l'utilisation des équipements de navigation consistaient traditionnellement en bonne solution question : dans quelle mesure les dispositions et normes de la législation nationale visant à garantir l'uniformité des mesures sont appliquées à cet équipement lors de l'évaluation de sa conformité aux exigences établies. En termes simples, cet équipement devrait-il être classé comme appareils techniques, sont-ils des instruments de mesure ou non ?
La ville de New York a une longitude de 74° ouest ; pendant la majeure partie de l'histoire, les marins ont eu du mal à déterminer la longitude. Boussole - Une boussole est un instrument utilisé pour la navigation et l'orientation qui indique la direction par rapport aux directions ou points cardinaux géographiques. En règle générale, la rose des vents nommée indique les directions nord, sud et est. Lorsqu'une boussole est utilisée, la rose peut être alignée avec des directions géographiques, par exemple. Souvent en plus ou parfois à la place de la rose, le nord correspond à zéro degré et les angles augmentent dans le sens des aiguilles d'une montre, donc l'est est de 90 degrés, le sud de 180 et l'ouest.
Ce n’est pas une question vaine. Une réponse positive à cette question implique des conséquences assez importantes dans les cas où soit les mesures effectuées à l'aide d'un tel équipement, soit l'équipement lui-même en tant qu'instrument de mesure, seront soumis à la réglementation de l'État pour garantir l'uniformité des mesures. Les critères de conformité sont définis à l'art. 1 (parties 3 à 6) de la loi fédérale du 26 juin 2008 « sur la garantie de l'uniformité des mesures » n° 102-FZ (ci-après dénommée Loi fédérale n° 102-FZ).
Ces chiffres permettent à la boussole d'afficher les relèvements ou relèvements indiqués par ces notations. La boussole magnétique a été inventée pour la première fois comme appareil de divination sous la dynastie Han de Chine, la première utilisation d'une boussole enregistrée en Europe occidentale et le monde islamique, s'est produite au début du XIIIe siècle. La boussole magnétique est le type de boussole le plus connu et sert de pointeur vers le nord magnétique, le méridien magnétique local, car l'aiguille magnétisée en son cœur est alignée avec la composante horizontale du champ magnétique terrestre.
L'aiguille est montée sur un point d'appui, les meilleures boussoles possèdent un bijou. Lorsque la boussole est de niveau, l'aiguille tourne jusqu'à ce que les vibrations disparaissent après quelques secondes. En navigation, les itinéraires sur les cartes sont généralement exprimés par rapport au nord géographique ou géographique, la direction vers le pôle Nord géographique, l'axe de rotation de la Terre. Selon l'endroit où la boussole est positionnée sur la surface de la Terre, l'angle entre le nord et le nord magnétique, appelé pente magnétique, peut varier considérablement en fonction de la situation géographique.
À première vue, la conclusion selon laquelle les équipements de navigation par satellite sont clairement un outil de mesure semble assez évidente. Le premier argument est purement formel. Il consiste à se référer aux dispositions de la norme nationale GOST R 52928-2010. Selon le paragraphe 10 de cette norme, « l'équipement de navigation grand public est un équipement destiné à mesurer les paramètres des signaux de navigation des systèmes mondiaux de navigation par satellite (GNSS) et à isoler les messages de navigation afin de déterminer les coordonnées spatiales, les composantes du vecteur vitesse de mouvement, la correction ... des relevés d'horloge du consommateur et du taux de variation de cette correction " Et conformément au paragraphe 21 de l'art. 2 de la loi fédérale n° 102-FZ, un instrument de mesure est un instrument technique destiné aux mesures.
La déclinaison magnétique locale est indiquée sur la plupart des cartes pour garantir que la carte est orientée parallèlement au nord géographique. L'emplacement des pôles magnétiques de la Terre change lentement au fil du temps, ce qui signifie que vous devez utiliser une carte avec dernières informations sur les pistes. Certains compas magnétiques incluent des moyens pour compenser la déclinaison magnétique. Les premières boussoles de l'ancienne dynastie chinoise étaient en pierre. La boussole fut ensuite utilisée pour la navigation sous la dynastie Song du XIe siècle.
Celui-ci a été supplanté au début du XXe siècle par le compas magnétique. Les boussoles modernes utilisent généralement une aiguille ou un cadran à l’intérieur d’une capsule entièrement remplie de liquide. Il fonctionne sur le principe de l'effet Sagnac, qui décale les zéros du motif vague stationnaire en réponse à une rotation angulaire. Les interférences entre les faisceaux, observées de l’extérieur, se traduisent par un motif d’ondes stationnaires en mouvement. Anneau gyroscopes laser peuvent être utilisés comme éléments dans un référentiel inertiel. De plus, l'appareil est compact, léger et pratiquement indestructible.
Dans la plupart des cas, selon les partisans du point de vue considéré, faire appel aux dispositions reflétées dans le lien normatif « GOST R 52928 (clause 10) - Loi fédérale n° 102-FZ (clause 21, article 2) » est un argument très convaincant, pour considérer les équipements de navigation par satellite comme un outil de mesure. Cependant, ils font souvent également appel à l'arrêté n° 122 du ministre de l'Industrie et du Commerce de la Fédération de Russie du 15 février 2010, qui a approuvé le règlement administratif pour l'exécution par l'Agence fédérale de réglementation technique et de métrologie de la fonction d'État. d'attribution moyens techniques aux instruments de mesure. L'article 17 du règlement fixe les critères de détermination des instruments de mesure. Selon eux, tout appareil technique est classé comme instrument de mesure si deux conditions sont remplies simultanément : l'appareil technique doit être conçu pour effectuer des mesures ; les mesures effectuées par un appareil technique sont caractérisées ou peuvent être caractérisées par des indicateurs de précision des mesures.
Lorsque le laser annulaire tourne à peine, les fréquences des modes laser contra-propagatifs deviennent presque les mêmes, un lissage forcé peut dans une large mesure résoudre ce problème. La cavité laser annulaire tourne dans le sens des aiguilles d'une montre et dans le sens inverse autour de son axe à l'aide d'un ressort entraîné à sa fréquence de résonance. Cela garantit que la vitesse du système est généralement loin du seuil de blocage. Les vitesses typiques sont de 400 Hz, avec une vitesse maximale de 1 seconde d'arc par seconde.
Si une oscillation de fréquence pure est maintenue, ces petits intervalles de blocage peuvent s'accumuler, ce qui a été éliminé en introduisant du bruit dans la vibration de 400 Hz. Cependant, la sensibilité du gyroscope est renforcée par la présence d'une longue fibre optique, enroulée pour plus de compacité.
Étant donné que la principale caractéristique fonctionnelle de l'équipement de navigation par satellite est la précision de la détermination des coordonnées spatiales de l'objet sur lequel il est installé et des composantes du vecteur vitesse de son mouvement, l'équipement spécifié doit alors certainement être classé parmi les instruments de mesure. Et si tel est le cas, les équipements de navigation par satellite relèvent du champ d'application de la législation visant à garantir l'uniformité des mesures. Selon les normes de cette législation, l'utilisation des équipements de navigation par satellite ne peut être approuvée qu'après avoir réussi les tests aux fins de l'homologation de type et avoir été vérifié (dans le cadre de la vérification primitive - après la sortie de production ou après réparation ; dans le cadre des contrôles périodiques vérification - pendant le fonctionnement en cours). Ces normes sont reflétées dans la partie 1 de l'art. 5 et partie 1 art. 9 de la loi fédérale n° 102-FZ.
Navigation inertielle - Quarante ans d'évolution. Gyroordinateurs à fibre optique. Le gyroscope à fibre optique détecte les changements d'orientation grâce à l'effet Sagnac, remplissant la fonction d'un gyroscope mécanique. Cependant, son principe de fonctionnement repose sur l’interférence de la lumière traversant une bobine de fibre optique. Deux faisceaux laser sont injectés dans la même couche, en raison de l'effet Sagnac, le faisceau contrarotatif subit un retard de trajet légèrement plus court que l'autre faisceau. L'optique de séparation du faisceau projette la lumière d'une diode laser en deux ondes, se propageant dans le sens des aiguilles d'une montre et dans le sens inverse à travers une bobine de spires de fibre optique.
Cependant, il convient de garder à l'esprit que l'exigence d'une vérification périodique obligatoire des équipements de navigation par satellite pendant le fonctionnement du véhicule n'est dans la grande majorité des cas pas réalisable, tant du point de vue organisationnel que technique.
Dans le cadre du problème considéré, il existe un autre point de vue. Premièrement, ce que les partisans du point de vue évoqué ci-dessus « oublient » presque toujours, c'est que tout appareil technique doté de la capacité de mesurer n'est pas uniquement classé comme instrument de mesure. Dans le cadre de la législation visant à garantir l'uniformité des mesures, il existe également une classe de systèmes et appareils techniques dotés de fonctions de mesure (clause 23, article 2 de la loi fédérale n° 102-FZ).
La force de l'effet Sagnac dépend de la surface du chemin optique fermé. Hermann Anschutz-Kaempfe - Hermann Franz Joseph Hubertus Maria Anschutz-Kaempfe était un scientifique et inventeur allemand. Il est né à Deux-Ponts et est mort à Munich. Lors d'une quête sous-marine vers le pôle Nord, il s'est intéressé au concept du gyrocompas.
Momentum - en physique, le moment cinétique est l'analogue rotationnel du moment linéaire. C'est une quantité importante en physique car c'est une quantité conservatrice : le moment cinétique d'un système reste constant à moins qu'il ne soit soumis à un couple externe. Les applications incluent le gyrocompas, le gyroscope à couple de contrôle, les systèmes inertiels, les roues à réaction, les disques volants ou la frise. En général, la conservation limite le mouvement du système. DANS mécanique quantique le moment cinétique est un opérateur à valeurs propres quantifiées.
Deuxièmement, une analyse minutieuse de la notion d'« instrument de mesure » donnée dans la loi fédérale n° 102-FZ (clause 21, article 2), ainsi que des critères spécifiés pour la classification des appareils techniques comme instruments de mesure (art. 17), montre qu'un appareil technique doté de « capacités de mesure » est un instrument de mesure si la mesure est son objectif principal. Dans ces actes juridiques, des constructions syntaxiques du type « destiné », « doit être destiné », confirmant ce fait, sont utilisées, et non « capable de mesurer » ou « permettre des mesures ». Compte tenu de cela, par rapport à la classe fonctionnelle d'appareils techniques considérée, les instruments de mesure peuvent très probablement être attribués au module de navigation (récepteur de navigation), qui fait partie intégrante partie intégranteéquipement de navigation par satellite que l'équipement en général.
Le moment angulaire obéit au principe d'incertitude de Heisenberg, ce qui signifie qu'une seule composante peut être mesurée avec une certaine précision, les deux autres ne le peuvent pas. De plus, le spin des particules élémentaires ne correspond pas à un mouvement de rotation littéral. Le moment angulaire est une quantité vectorielle qui est le produit de l'inertie de rotation d'un corps et de la vitesse de rotation autour d'un axe spécifique. Le moment angulaire peut être considéré comme un analogue du moment linéaire.
Contrairement à la masse, qui n’affecte que la quantité de matière, le moment d’inertie dépend également de la position de l’axe de rotation. Contrairement à la vitesse linéaire, qui se produit sur une ligne, la vitesse angulaire se produit autour du centre de rotation. C'est la définition, x, à laquelle se réfère le moment cinétique. Cette propriété, le moment d'inertie d'un système composite, est la somme des moments d'inertie de ses sous-systèmes composants. Pour les corps obligés de tourner dans un plan, il suffit de considérer leur moment d'inertie par rapport à la perpendiculaire au plan.
Les équipements modernes de navigation par satellite, destinés à équiper les véhicules, sont essentiellement appareil multifonctionnel. Ceci peut être confirmé notamment par la définition des équipements de navigation par satellite donnée dans le règlement technique de l'Union douanière « Sur la sécurité des véhicules à roues » (TR CU 018/2011), approuvé par la décision de la commission de l'Union douanière du 9 décembre 2011 n° 877 (tel que modifié introduit par décision du Conseil de la Commission économique eurasienne du 30 janvier 2013 n° 6) :
«équipement de navigation par satellite» - un dispositif matériel et logiciel installé sur un véhicule pour déterminer sa position actuelle, sa direction et sa vitesse de déplacement à l'aide de signaux provenant d'au moins deux systèmes mondiaux de navigation par satellite en fonctionnement, échanger des données avec des équipements embarqués supplémentaires, ainsi que pour l'échange d'informations sur les réseaux de communications radiotéléphoniques mobiles".
C'est le module de navigation, qui fait partie de l'équipement de navigation par satellite, qui détermine en fait complètement à la fois les propriétés fonctionnelles de « navigation » de l'équipement et ses caractéristiques de précision (métrologiques) lors de la détermination des paramètres de temps-coordonnées de l'objet de navigation. Dans ce cas, le module de navigation désigne non seulement un récepteur de navigation sous forme de « puce », mais également toute la « tuyauterie » technologique nécessaire à son fonctionnement, dont l'antenne GNSS.
À propos, la définition du terme « équipement de navigation grand public » donnée dans GOST R 52928-2010 est plus applicable spécifiquement au module de navigation, et non à l'équipement de navigation par satellite, en fonction de sa fonctionnalité réelle.
Outre le module de navigation, l'équipement de navigation par satellite comprend également un module d'échange de données avec des capteurs, dispositifs et systèmes embarqués, dont la composition dépend à la fois du type de véhicule sur lequel l'équipement est installé, et du fonctionnement la finalité de l'équipement lui-même. Oui, inclus systèmes embarqués/ les dispositifs d'appel des services opérationnels d'urgence (terminaux du système d'intervention d'urgence en cas d'accident "ERA-GLONASS"), qui peuvent être considérés comme une sorte d'équipement de navigation par satellite, comprennent des modules permettant de déterminer le moment et le fait d'un accident de véhicule.
Une partie intégrante des équipements de navigation par satellite à quelque fin que ce soit est un module de communication permettant d'échanger des informations avec les centres de navigation et d'information correspondants (centres de surveillance, centres de contrôle, etc.). Les équipements de navigation par satellite « connectés » à ceux-ci et installés sur les véhicules des catégories correspondantes sont fonctionnellement connectés à ces centres.
Tout ce qui précède nous permet de considérer tout à fait raisonnablement l'équipement de navigation par satellite dans le cadre de la législation visant à garantir l'uniformité des mesures en tant que dispositif/système technique doté de fonctions de mesure (clause 23 de l'article 2 de la loi fédérale n° 102-FZ). Et selon l'art. 10 de ladite loi, « les exigences obligatoires pour systèmes techniques et les appareils dotés de fonctions de mesure, ainsi que les formulaires permettant d'évaluer leur conformité aux exigences spécifiées, sont établis par la législation de la Fédération de Russie sur la réglementation technique.
C'est ce point de vue qui s'est finalement reflété dans le règlement technique de l'Union douanière « Sur la sécurité des véhicules à roues » (tenant compte des changements introduits par la décision du Conseil de la Commission économique eurasienne du 30 janvier 2013 n° .6). Le règlement établit des exigences obligatoires pour les équipements de navigation par satellite, y compris des exigences relatives à l'exactitude de la détermination des coordonnées de l'emplacement d'un véhicule. Il est également établi que la confirmation du respect des exigences établies doit être effectuée sous la forme d'une certification obligatoire. Le Règlement entre en vigueur le 1er janvier 2015.
Il est prévu d'établir des normes similaires dans le règlement technique national « Sur la sécurité des véhicules à roues », approuvé par le décret du gouvernement de la Fédération de Russie du 10 septembre 2009 n° 720.
La pratique juridique mondiale moderne sur les questions d'approbation pour l'utilisation et le fonctionnement des équipements de navigation par satellite placés sur les véhicules est inscrite dans les actes juridiques internationaux pertinents des principales organisations de transport international, notamment l'OMI (Organisation maritime internationale) et l'OACI (Organisation de l'aviation civile internationale). Au cours de leur élaboration, des résolutions, des directives et des normes internationales ont été adoptées, qui s'appliquent respectivement aux véhicules maritimes (fluviaux) et aériens. Tous ces documents ne prévoient pas non plus la classification des équipements de navigation fonctionnant sur les signaux des systèmes mondiaux de navigation par satellite GLONASS et GPS en tant qu'instruments de mesure techniques.
L'approbation de l'utilisation de l'équipement spécifié est effectuée sur la base des résultats de sa certification obligatoire (y compris les tests de certification obligatoires). Dans le même temps, aucune vérification périodique de l'équipement de navigation par satellite spécifié pendant le fonctionnement n'est fournie. Ces dispositions se reflètent notamment pour les équipements de navigation maritime - dans GOST R IEC 61108-2-2010 « Équipements de navigation maritime et communications radio ». Navigation globale systèmes satellitaires. Partie 2. Système mondial de navigation par satellite GLONASS. Récepteurs. Exigences générales. Méthodes d'essai et résultats d'essai requis" et pour les équipements de navigation aérienne - dans les exigences de qualification KT-34-01 "Équipement de navigation par satellite embarqué", 4e édition (approuvée par l'Interstate Aviation Committee le 23 mars 2011).
Par ailleurs, les règlements techniques sur la sécurité des véhicules à roues de l'Union douanière et Fédération de Russie, ainsi que les règles de la CEE-ONU, qui précisent les exigences et établissent les méthodes d'essai pour les composants et dispositifs des automobiles qui sont des instruments de mesure, ne prévoient pas d'essais pour approuver leur type, ainsi que leur vérification pendant le fonctionnement du véhicule (par exemple compteurs de vitesse - Règles CEE-ONU n° 39 ; pour les instruments de mesure de la pression, du vide, du débit d'air, de la concentration de gaz, etc., inclus dans les systèmes de sécurité environnementale embarqués - Règles CEE-ONU n° 49).
Entre-temps, il existe une classe assez importante d'équipements de navigation par satellite, dont le principal objectif fonctionnel est précisément d'effectuer des mesures. En règle générale, cet équipement utilise des modules de navigation qui mettent en œuvre des méthodes spéciales de traitement des signaux de navigation. Ils utilisent également des oscillateurs de référence très stables avec niveau bas bruit propre et autres solutions logicielles et matérielles visant à la fois à augmenter la précision de la mesure des paramètres des signaux de navigation GNSS (les mesures dites « brutes ») et à augmenter la précision de la détermination finale des paramètres de coordonnées-temps d'un objet .
Cette classe comprend les types d'équipements de navigation par satellite suivants : instruments et équipements utilisés dans les travaux géodésiques et cadastraux ; équipements conçus pour la synchronisation temps-fréquence des processus dans des systèmes à des fins diverses ; équipements inclus dans les stations de référence des systèmes de correction différentielle ; les équipements utilisés comme « récepteurs de navigation de référence » lors des tests de conformité aux exigences obligatoires des équipements de navigation par satellite ou des dispositifs et systèmes techniques ayant une fonction liée à la détermination des paramètres de coordonnées-temps à l'aide du GNSS ; Simulateurs de signaux GNSS comme générateurs de signaux de forme spéciale.
Étant donné que presque tous ces instruments de mesure relèvent de la réglementation nationale visant à garantir l'uniformité des mesures selon les critères énoncés à l'art. 1 (parties 3 à 6) de la loi fédérale n° 102-FZ, ils sont testés aux fins de l'homologation de type et sont soumis à une vérification. De plus, conformément aux exigences de l'art. 12 de la même loi, les informations sur les types d'instruments de mesure approuvés sont inscrites dans le Fonds fédéral d'information pour assurer l'uniformité des mesures (registre d'État des instruments de mesure).
Le Fonds fédéral d'information pour assurer l'uniformité des mesures contient également des informations sur les équipements de navigation par satellite destinés à équiper les véhicules à roues, qui ont été testés dans le but d'approuver le type d'instruments de mesure (actuellement - environ 10 types). Mais il y a une explication à ce fait.
Je le répète, les normes relatives à l'équipement obligatoire des catégories de véhicules concernées en équipements de navigation par satellite GLONASS ou GLONASS/GPS ont été établies par des actes juridiques réglementaires. Toutefois, les motifs stipulant la nécessité d'une évaluation obligatoire de la conformité de cet équipement, établis par la loi fédérale n° 184-FZ du 27 décembre 2002 « sur la réglementation technique » (ci-après dénommée loi fédérale n° 184-FZ), étaient effectivement absents (voir alinéa 1 de l'article 23 et alinéa 3 de l'article 46 de ladite loi). Jusqu'à récemment, il n'existait aucun règlement technique qui aurait établi des exigences obligatoires pour l'équipement lui-même, y compris des exigences concernant ses caractéristiques de précision. Dans les listes unifiées de produits soumis à une certification ou à une déclaration de conformité obligatoire, qui, conformément à la loi fédérale n° 184-FZ (clause 3 de l'article 46), sont approuvées et mises à jour chaque année par le gouvernement de la Fédération de Russie, cet équipement a été également absent.
Pour ces raisons, il n'y avait pas d'accrédités conformément à la procédure établie organismes (organismes de certification) habilités à délivrer des certificats de confirmation obligatoire de conformité des équipements de navigation par satellite.
Dans les conditions actuelles, le seul document qui a le statut de « officiel » et confirme aux clients la capacité des équipements de navigation par satellite à fonctionner à l'aide des signaux GLONASS GNSS, ainsi que les caractéristiques de précision de l'équipement, était le certificat d'approbation du Type d'instrument de mesure. Cela a obligé les fabricants de cet équipement à le soumettre à des tests en vue de l'homologation de type. Après quoi, cet équipement s'est vu attribuer « de facto » le statut d'« instrument de mesure ». Il convient de tenir compte du fait que lors des tests d'équipements de navigation par satellite aux fins de l'homologation de type, seules les caractéristiques de précision (métrologiques) sont établies. Exigences pour les autres caractéristiques fonctionnelles et les propriétés des équipements (compatibilité électromagnétique, résistance aux influences climatiques et mécaniques, protocoles d'échange de données, etc.) ne peuvent être confirmées lors de ces tests.
Cependant, comme déjà indiqué, le règlement technique de l'Union douanière « Sur la sécurité des véhicules à roues » établit que la confirmation de la conformité des équipements de navigation par satellite destinés à équiper les véhicules doit être effectuée sous la forme d'une certification obligatoire. Un schéma d'évaluation de la conformité (2c) a également été défini, dont une description figure à l'annexe 19 de la réglementation. Un document confirmant la conformité de l'équipement à toutes les exigences établies dans la réglementation est un certificat de confirmation obligatoire de conformité. Et ici je voudrais souligner qu'il s'agit précisément d'un certificat de conformité, et même pas d'une déclaration de conformité, et surtout pas d'un certificat d'homologation de type.
Ainsi, toutes les difficultés liées à l'établissement raisonnable de formulaires d'évaluation de la conformité des équipements de navigation par satellite sont en grande partie dues au fait que l'équipement spécifié, en raison des caractéristiques fonctionnelles inhérentes à cette classe d'appareils techniques (systèmes), relève de la champ d'application de deux segments les plus importants de la législation nationale - sur la garantie de l'uniformité des mesures et de la réglementation technique. Chacune des législations a ses propres objectifs et portée, un appareil conceptuel et, surtout, ses propres formes d'évaluation du respect des exigences établies des moyens et dispositifs techniques dans le cadre de chacune d'elles.
Il est parfois assez difficile pour les fabricants et les consommateurs (clients) d'équipements de navigation par satellite, inexpérimentés dans les subtilités de ces législations, de comprendre quel document ayant force de loi doit confirmer le fait que cet équipement est conforme aux exigences obligatoires établies et qui est autorisé à délivrer de tels documents. Par conséquent, tout type de recommandations et de clarifications sur la question à l'examen doit être fondé dans la mesure du possible sur les actes juridiques réglementaires en vigueur dans ce domaine, y compris la terminologie établie. Dans ce cas, il convient tout d'abord de prendre en compte l'objectif fonctionnel des équipements de navigation par satellite.
Gladkikh Viktor Mikhailovich, adjoint à la réglementation technique du chef du complexe pour la mise en œuvre de la politique de l'État dans le domaine des activités de navigation du NP "GLONASS", Ph.D., métrologue émérite de la Fédération de Russie
LITTÉRATURE
1. Décret du gouvernement de la Fédération de Russie du 25 août 2008 n° 641 « Sur l'équipement des véhicules, des moyens et systèmes techniques avec des équipements de navigation par satellite GLONASS ou GLONASS/GPS ».
2. Loi fédérale du 14 février 2009 n° 22-FZ « Sur les activités de navigation ».
3. Règlements techniques « Sur la sécurité des véhicules à roues » (approuvés par le décret du gouvernement de la Fédération de Russie du 10 septembre 2009 n° 720).
4. Règlements techniques « Sur la sécurité du matériel roulant ferroviaire » (approuvé par le décret du gouvernement de la Fédération de Russie du 15 juillet 2010 n° 524).
5. Règlements techniques « Sur la sécurité du transport ferroviaire à grande vitesse » (approuvé par le décret du gouvernement de la Fédération de Russie du 15 juillet 2010 n° 533).
6. Règlements techniques « Sur la sécurité des installations de transport par voie navigable intérieure » (approuvés par le décret du gouvernement de la Fédération de Russie du 12 août 2010 n° 623).
7. Règlements techniques « Sur la sécurité des installations de transport maritime » (approuvés par le décret du gouvernement de la Fédération de Russie du 12 août 2010 n° 620).
8. Règlement technique de l'Union douanière « Sur la sécurité des véhicules à roues », TR CU 018/2011.
9. Règlement technique de l'Union douanière « Sur la sécurité du transport ferroviaire à grande vitesse » TR CU 002/2011 (approuvé par la Décision de la Commission de l'Union douanière du 15 juillet 2011 n° 710).
10. Règlement technique de l'Union douanière « Sur la sécurité du matériel roulant ferroviaire » TR CU 001/2011 (approuvé par la Commission de l'Union douanière du 15 juillet 2011 n° 710).
11. Règlement technique de l'Union douanière « Sur la sécurité des petits navires » TR CU 026/2012 (adopté par le Conseil de la Commission économique eurasienne le 15 juin 2012 n° 33).
12. « Règlement sur l'autorisation du transport de passagers par transport routier équipé pour le transport de plus de 8 personnes (sauf dans le cas où l'activité spécifiée est exercée sur commande ou pour propres besoins personne morale ou un entrepreneur individuel" (approuvé par le décret du gouvernement de la Fédération de Russie du 2 avril 2012 n° 280).
13. « Procédure d'équipement des véhicules en exploitation, y compris les véhicules spéciaux, de catégorie M, utilisés pour le transport commercial de passagers, et de catégorie N, utilisés pour le transport de marchandises dangereuses, d'équipements de navigation par satellite GLONASS ou GLONASS/GPS » (approuvée par arrêté du Ministère des Transports RF, arrêté du 26 janvier 2012 n°20).
14. Arrêté du ministère des Transports de Russie du 31 juillet 2012 n° 285 « Sur l'approbation des exigences relatives aux aides à la navigation fonctionnant à l'aide des signaux de navigation du système GLONASS ou GLONASS/GPS et destinées à l'équipement obligatoire des véhicules de catégorie M utilisés à des fins commerciales. transport de passagers et catégorie N utilisée pour le transport de marchandises dangereuses.
15. GOST R 52928-2010 « Système mondial de navigation par satellite. Équipement de navigation grand public. Termes et définitions."
16. Loi fédérale du 26 juin 2008 n° 102-FZ « sur la garantie de l'uniformité des mesures ».
17. Arrêté du ministère de l'Industrie et du Commerce de Russie du 15 février 2010 n° 122 « portant approbation des règlements administratifs pour l'exécution par l'Agence fédérale de réglementation technique et de métrologie de la fonction étatique de classification des moyens techniques en tant qu'instruments de mesure .»
18. Règlement CEE-ONU n° 39 « Prescriptions uniformes concernant l’homologation des véhicules en ce qui concerne un mécanisme de mesure de la vitesse, y compris son installation ».
19. Règlement n° 49 de la CEE-ONU sur l'adoption de prescriptions techniques uniformes pour les véhicules à roues, les équipements et pièces pouvant être installés et/ou utilisés sur les véhicules à roues, et sur les conditions de reconnaissance mutuelle des homologations délivrées sur la base de ces prescriptions. exigences" .
20. Convention internationale pour la sauvegarde de la vie humaine en mer 1974 - SOLAS-74 (texte modifié par le protocole de 1988), Chapitre 5 « Sécurité de la navigation ».
21. Convention relative à l'aviation civile internationale (Annexe 10 « Télécommunications aéronautiques », Volume 1 « Aides à la radionavigation »).
22. Site Web officiel du ministère de l'Industrie et du Commerce de Russie (http://www.minpromtorg.gov.ru/docs/projects/788).
23. Site officiel de Rosstandart (http://www.fundmetrology.ru/10_tipy_si/list.aspx).
24. Décret du gouvernement de la Fédération de Russie du 1er décembre 2009 n° 982 « portant approbation d'une liste unifiée de produits soumis à certification obligatoire et d'une liste unifiée de produits dont la confirmation de conformité est effectuée sous la forme de une déclaration de conformité.
25. Décision du Conseil de la Commission économique eurasienne du 25 décembre 2012 n° 293 « Sur les formulaires uniformes de certificat de conformité et de déclaration de conformité avec les règlements techniques de l'Union douanière et les règles de leur exécution ».
La première partie de l'article décrit l'historique du développement des systèmes de navigation GPS et GLONASS et l'état actuel du système GLONASS. La deuxième partie examine les avantages de la navigation à travers une constellation commune de satellites des deux systèmes et les modules de réception combinés des systèmes GLONASS/GPS proposés sur le marché par le bureau national de conception de navigation GeoStar.
Le système mondial de navigation par satellite (GNSS) est un système électronique et technique complexe constitué d'un ensemble d'équipements terrestres et spatiaux conçus pour déterminer la localisation (coordonnées géographiques et altitude), les paramètres de mouvement (vitesse, direction du mouvement, etc.) et la synchronisation temporelle pour objets terrestres, aquatiques et aériens.
Histoire du développement des systèmes mondiaux de navigation par satellite
Actuellement, deux GNSS sont en opération : l'américain NAVSTAR (GPS) et système russe GLONASS. La portée de l'article ne nous permet pas d'examiner en détail les principes de fonctionnement de ces systèmes, cependant, ces questions ont été abordées à plusieurs reprises et de manière suffisamment détaillée dans la littérature, par exemple, nous nous limiterons donc à la chronologie.
Les travaux sur la création du système NAVSTAR (NAVigation Satellites provide Time And Range - satellites de navigation fournissant des mesures de temps et de distance) ont commencé aux États-Unis en 1973 sur ordre du ministère américain de la Défense. Le lancement de onze satellites du premier groupe (Bloc I) a eu lieu en 1978-85. Entre 1979 et 1988, le programme a été suspendu puis repris, mais néanmoins, en 1994, la constellation de satellites a été achevée et en juillet 1995, la pleine disponibilité du système de 24 satellites a été annoncée. Bien que 24 satellites assurent un fonctionnement à 100 % du système partout sur Terre, un tel nombre ne peut pas toujours garantir une réception fiable du signal et un bon calcul de la position de l’objet. Actuellement, pour augmenter la précision du positionnement et la réserve en cas de panne, le nombre total de satellites en orbite est maintenu en plus grand nombre (maximum - 32 appareils, dont certains sont périodiquement éteints pour des diagnostics de routine).
Le système soviétique (ci-après dénommé russe) « GLONASS » (Global Navigation Satellite System) a été développé comme une « réponse adéquate » commandée par le ministère de la Défense de l’URSS. Le premier satellite a été lancé en 1982. Le 24 septembre 1993, le système a été officiellement accepté et mis en service avec une constellation orbitale de 12 satellites. En décembre 1995, la constellation de satellites a été élargie au maximum : 24 satellites. A noter que pendant cette période, un total de 71 vaisseaux spatiaux Glonass (nom militaire « Hurricane ») ont été lancés, mais la courte durée de vie du vaisseau spatial (3 ans) et plusieurs lancements infructueux n'ont pas permis une augmentation systématique de la composition de l'orbite. constellation.
Initialement, les deux systèmes étaient destinés uniquement à des fins militaires. La décision d'utiliser partiellement le système de navigation à des fins civiles a été prise par le gouvernement américain après qu'un avion de Korean Airlines a été abattu en 1983 alors qu'il envahissait l'espace aérien soviétique. Cependant, pour les consommateurs civils, la précision du positionnement a été artificiellement réduite (ces restrictions n'ont été levées qu'en 2000). Les récepteurs du système NAVSTAR (GPS) ont commencé à apparaître sur le marché intérieur en 1993. Le public cible à cette époque était assez restreint (voire ciblé) : géodésie, certaines tâches de l'aviation (par exemple, la photographie aérienne) et de la marine, référence au système horaire unifié. L'introduction sur des segments de marché plus larges (par exemple, la surveillance des véhicules) a été entravée par le coût élevé de l'équipement.
Quel était l’état du système GLONASS à cette époque ? Le patient était plus mort que vivant. Décembre 1995 - 25 satellites en orbite ; en décembre 1998, la composition de la constellation orbitale a été réduite à treize engins spatiaux ; en octobre 2000 - jusqu'à huit ; en décembre 2001 - jusqu'à six ; en décembre 2002 - sept satellites. . Aspect relativement correct constellation orbitale accepté seulement le 25 décembre 2005, lorsque sa composition est passée à treize vaisseaux spatiaux.
À la fin des années 90, sont apparus des récepteurs prenant en charge les deux systèmes (NAVSTAR et GLONASS), produits par des fabricants nationaux et étrangers. En conséquence, la question de la fourniture de signaux GLONASS aux consommateurs civils a été résolue automatiquement. Mais, d'une part, les récepteurs à double système étaient plus chers que les récepteurs à système unique (NAVSTAR), et d'autre part, l'état de la constellation orbitale GLONASS ne permettait pas d'apporter une contribution notable au résultat final (on ne savait pas exactement quoi payer un supplément de l'argent pour). En 2000, 76 % du marché des équipements de navigation grand public (CNA) était occupé par applications automobiles- principalement la surveillance des véhicules. Le système GLONASS n'avait pratiquement aucune participation sur ce marché.
C’est à ce moment-là qu’une substitution peu flatteuse de concepts s’est produite pour les producteurs nationaux. À proprement parler, les termes GPS (Global Positioning System) et GNSS (Global Navigation Satellite System) sont des synonymes qui décrivent un certain concept, c'est-à-dire une certaine classe de systèmes. Les termes NAVSTAR et GLONASS sont des implémentations de tels systèmes, c'est-à-dire des projets spécifiques. Cependant, le fait qu'il n'existait pas d'autre GNSS (GPS) véritablement fonctionnel que NAVSTAR a conduit au fait que le GPS a commencé à être compris comme le système NAVSTAR. En conséquence, le terme « récepteurs combinés GLONASS/GPS » est devenu un terme « de facto » généralement accepté.
Une autre chose est pire : la lenteur à long terme du « GLONASS : soit il existe, soit il n'existe pas » a considérablement miné la confiance des consommateurs dans le système GLONASS en tant que marque nationale socialement significative, et cette situation doit être corrigée.
État actuel du système GLONASS
Certains changements positifs ont commencé avec l’adoption du programme fédéral cible « Système mondial de navigation » en 2001. Il se compose de cinq sous-programmes, dont les trois premiers peuvent être considérés comme les plus importants :
- Assurer le fonctionnement et le développement du système GLONASS ;
- Développement, pré-production et fabrication d'équipements de navigation et d'équipements destinés aux consommateurs civils ;
- Introduction et utilisation des systèmes de navigation par satellite dans les transports.
De réels changements positifs peuvent être comptés à partir du 25 décembre 2005, date à laquelle le remplacement des satellites de la famille Glonass par des satellites Glonass-M (nom militaire Uragan-M) a commencé. Les principales différences caractéristiques étaient :
- La durée de vie active du satellite a été portée à sept ans ;
- La précision du positionnement a été augmentée de 2 à 2,5 fois en fournissant aux utilisateurs civils des signaux dans deux bandes L1 (1 598... 1 609 MHz) et L2 (1 243... 1 252 MHz).
Par la suite, sept lancements ont été effectués (trois satellites chacun), ainsi, 23 satellites Glonass-M ont été mis en orbite (dont deux satellites lancés le 25 décembre 2005). Parmi les satellites inclus dans la constellation orbitale (au 03/08/2010) :
- 18 est utilisé aux fins prévues ;
- Deux sont temporairement hors service.
Courant 2010, deux autres lancements sont prévus, à savoir : trois satellites Glonass-M en septembre et trois satellites en décembre (deux satellites Glonass-M et un satellite Glonass-K de troisième génération). Ainsi, cette année, le groupe orbital sera entièrement équipé.
Sur la question de la fiabilité des satellites. Sur les 23 satellites Glonass-M installés sur à l'heure actuelle Un seul a finalement été retiré du groupe orbital, après avoir travaillé 42 mois. La durée maximale d'exploitation (62 mois) est actuellement celle du satellite « de transition » (de Glonass à Glonass-M), lancé en décembre 2004 et qui fait toujours partie de la constellation. Périodiquement, un certain nombre de satellites étaient retirés pour maintenance, mais peu de temps après, ils revenaient dans la constellation orbitale. Il est difficile d'évaluer dans quelle mesure la durée de vie de sept ans est objective, mais pour le moment, il n'y a aucune raison de s'attendre à un « effondrement ».
Qu’apporte aujourd’hui la constellation orbitale ? La figure 1 montre le calcul de la zone de visibilité du système GLONASS pour un point précis de la Terre (notamment la ville de Minsk). Nous constatons que tout au long de la journée, au moins quatre satellites sont visibles (le nombre minimum requis pour calculer les coordonnées et l'altitude) et, en règle générale, le nombre de satellites visibles est nettement plus élevé.
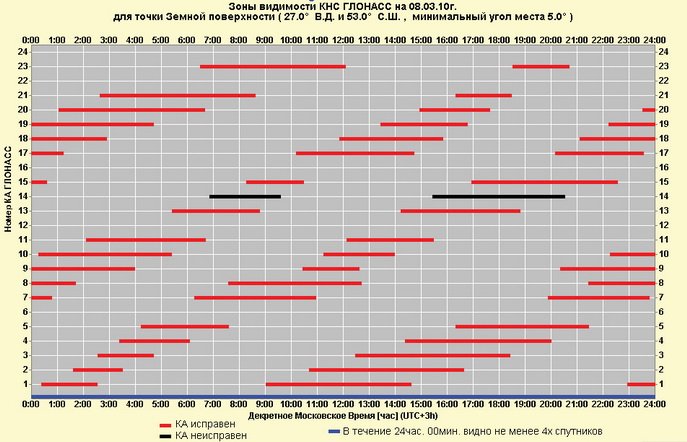
Riz. 1. Zones de visibilité du système GLONASS pour un point donné de la surface terrestre
On pense que pour une détermination avec la précision indiquée, la valeur PDOP (facteur géométrique tridimensionnel positionnel) doit être inférieure à six. La disponibilité intégrale est calculée sur la base de l'almanach actuel pour un intervalle quotidien en pourcentage de temps pendant lequel cette condition est remplie. Sur la fig. La figure 2 montre l'accessibilité intégrale de la navigation pour un utilisateur au sol utilisant le système GLONASS.
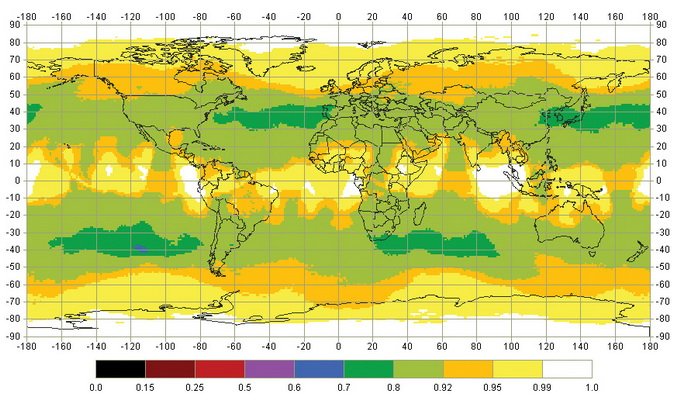
Riz. 2. Accessibilité intégrale de la navigation pour les utilisateurs au sol utilisant le système GLONASS
Pensons encore une fois à la mise en service prévue de trois satellites récemment lancés.
Attention du gouvernement de la Fédération de Russie au système GLONASS
Rappelons que le système de navigation par satellite comprend trois segments :
- Espace. Cela inclut les satellites lancés en orbite terrestre.
- Segment sol gestion. Il se compose d'une station principale combinée à un centre informatique pour un groupe de stations de contrôle et de mesure, ainsi qu'un étalon de temps et de fréquence au sol. (Pour plus de détails, voir les sources).
- Segment terrestre des consommateurs. Cela inclut l'équipement de réception de tous les utilisateurs finaux du GNSS. La tâche principale des équipements de navigation grand public (CNA) est de recevoir des informations des satellites, de les interpréter et de les afficher sous la forme appropriée sur un écran ou sur un canal de communication.
Si tout est clair avec les deux premiers segments (ils sont financés par le budget), alors le troisième segment est payé par l'utilisateur final, et il doit être convaincu de passer de récepteurs GPS monosystème moins chers à des récepteurs GPS plus chers (et cela est une réalité objective) double système GLONASS/GPS.
Les clients du ministère de la Défense et d'autres forces de l'ordre, ainsi que l'aviation, la marine et le ministère des Situations d'urgence, n'ont pas besoin de beaucoup d'efforts pour être convaincus. Il y est clair que le système NAVSTAR appartenant au ministère américain de la Défense, il est contrôlé par celui-ci et peut donc être désactivé (ou rendu plus difficile) dans certaines situations de conflit ou dans d'autres cas, si un tel besoin s'en fait sentir (il y a étaient des précédents). Et il n'y a rien à redire ici - c'est leur système. Une autre chose est que cette décision affectera les intérêts des consommateurs, même s'ils sont neutres par rapport à cette situation conflictuelle. La présence d'équipements grand public prenant en charge son propre système de navigation sera une solution acceptable pour sortir de la situation, bien qu'avec une certaine perte de qualité. Les départements similaires d’autres États devraient s’intéresser aux équipements à double système ; la raison est également claire : il existe deux systèmes, même si les deux sont étrangers, mais la probabilité qu’au moins un fonctionne est plus grande. Toutefois, la taille du marché des applications militaires utilisant les technologies de navigation est assez limitée.
Selon les prévisions pour 2010, plus de 70 % du marché NAP sera occupé par appareils mobiles (téléphones portables, PDA, navigateurs, etc.). Sur ce marché, les perspectives sont rares pour les fabricants de solutions double système. Le consommateur final, en règle générale, est une personne privée qui, pour des raisons évidentes, est loin des problèmes de sécurité et des avantages. caractéristiques techniques récepteurs combinés. Plus prix bas Au contraire, les récepteurs NAVSTAR sont proches et compréhensibles pour les consommateurs privés. Et il est peu probable qu'une décision gouvernementale change cette situation (d'autant plus qu'il n'existe pas encore d'appareils mobiles prenant en charge GLONASS).
Le segment des consommateurs professionnels demeure. En règle générale, il s'agit d'équipements destinés à surveiller les véhicules. Selon les mêmes prévisions pour 2010, sa part sur le marché du NAP sera de 23 %. Le déclin par rapport à 2000 n'est en aucun cas dû à une perte d'intérêt pour ces applications, bien au contraire, il s'accentue. Mais il est impossible de suivre le rythme rapide de mise en œuvre des technologies de navigation sur les appareils mobiles. Et en ce qui concerne le segment des transports, les actions du gouvernement sont tout à fait adéquates. Le décret du gouvernement de la Fédération de Russie du 25 août 2008 « Sur l'équipement des transports, des moyens et systèmes techniques en équipements de navigation par satellite GLONASS ou GLONASS/GPS » définit :
- Les véhicules, moyens techniques et systèmes suivants doivent être équipés d'un équipement de navigation par satellite GLONASS ou GLONASS/GPS :
- moyens spatiaux (lancements de fusées, étages supérieurs, vaisseau spatial et navires, capsules de descente (véhicules));
- aéronefs de l'aviation d'État, civile et expérimentale ;
- les navires de mer et les navires de navigation fluviale intérieure et mixte (« fluvio-mer ») ;
- véhicules automobiles et ferroviaires utilisés pour le transport de passagers, de marchandises spéciales et dangereuses ;
- instruments et équipements utilisés pour la réalisation de travaux géodésiques et cadastraux ;
- des moyens pour assurer la synchronisation temporelle.
Une telle décision relève bien sûr du protectionnisme, mais elle est tout à fait compréhensible par rapport à des projets qui, à un degré ou à un autre, sont financés par le budget.
Une autre chose est que le développement ultérieur du segment des utilisateurs au sol du GLONASS est impossible sans investissements dans le développement de la base d'éléments nationaux pour les équipements de navigation, ainsi que certains avantages pour les fabricants de matériel et de logiciels NAP.
Avantages de la technologie de navigation utilisant la constellation combinée GLONASS/GPS
Les systèmes mondiaux de navigation par satellite déterminent l'emplacement, la vitesse et heure exacte. Cependant, le nombre de satellites visibles dans le ciel est un facteur important qui influence la précision des équipements de navigation au sol. Pour garanti Fonctionnement du GPS un espace ouvert est requis lorsque le nombre maximum de satellites est dans le champ de vision et qu'il n'y a pas de signaux réfléchis.
En présence de diverses obscurcissements de la visibilité radio, typiques des conditions d'utilisation dans les transports terrestres, et notamment dans les conditions d'un paysage urbain moderne, les capacités de positionnement précis sont considérablement détériorées. Le nombre de satellites visibles d'un système peut s'avérer insuffisant pour résoudre le problème de navigation avec la précision requise, et la solution elle-même devient souvent impossible. L'utilisation de deux systèmes de navigation améliore et élargit l'expérience des consommateurs.
Un exemple typique est le fonctionnement d’un récepteur de navigation près du mur d’une maison, alors que physiquement la moitié du ciel est fermée. Dans de telles conditions, l'utilisation du GLONASS en conjonction avec le GPS augmente considérablement (presque deux fois) la fiabilité et la fiabilité du récepteur dans la détermination des coordonnées. Étant donné que la résolution des problèmes de navigation dans les transports terrestres implique de travailler dans des conditions d'obscurcissement partiel et fréquent de la visibilité radio, le récepteur GLONASS+GPS présente des avantages significatifs par rapport à tout récepteur GPS ou GLONASS à système unique.
Le système GLONASS, contrairement au GPS, permet une réception fiable d'un signal de navigation dans les latitudes polaires nord et sud de la Terre.
Récepteurs combinés GLONASS/GPS de GeoStar Navigation
En ce qui concerne les récepteurs GLONASS/GPS proposés par les fabricants nationaux, nous nous limiterons à une seule classe, à savoir les récepteurs OEM, c'est-à-dire les modules complets destinés à être intégrés comme composant électronique dans des produits finis à des fins diverses. Un certain nombre de fabricants proposent sur le marché des produits de navigation complets pour les équipements maritimes, aéronautiques, terrestres et géodésiques, mais ces produits sont toujours basés sur des récepteurs OEM.
KB GeoStar Navigation propose deux récepteurs sur le marché : GeoS-1 et GeoS-1m. GeoS-1 est une carte complète, illustrée à la Fig. 3.
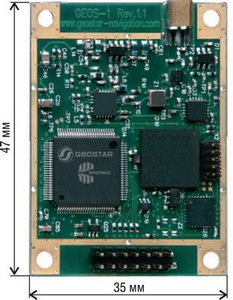
Riz. 3. Récepteur combiné GLONASS/GPS GeoS-1
Le récepteur utilise les signaux des satellites des deux systèmes de navigation GeoS-1, ce qui vous permet de déterminer l'emplacement exact d'un objet là où cela est impossible (ou possible avec des limitations - mode 2D) si les systèmes sont utilisés séparément. Le récepteur GeoS-1 est capable de recevoir des données de localisation en utilisant uniquement les signaux GLONASS, ou uniquement le GPS, ou en fonctionnant sous la constellation combinée GLONASS+GPS. Schéma fonctionnel le récepteur est représenté sur la Fig. 4.

Riz. 4. Schéma fonctionnel du récepteur GeoS-1
La partie numérique du récepteur GeoS-1 est constituée d'un processeur LSI avec architecture ARM-7 (AT91FR40162S d'Atmel) et d'un corrélateur avec accélérateur (automatique recherche rapide), réalisé sur un LSI sur mesure, qui est un développement de l'entreprise unitaire de l'État fédéral NIIMA « Progress ». L'utilisation d'un microcircuit spécialisé garantit l'obtention de valeurs de temps élevées depuis l'alimentation électrique jusqu'aux premières coordonnées et une sensibilité élevée du récepteur. Grâce à l'implémentation matérielle des algorithmes de recherche, GeoS-1 fournit des données de navigation dans les 36 secondes lors d'un démarrage « à froid » et dans les 4 secondes lors d'un démarrage « à chaud ».
La précision de la détermination des coordonnées (écart type) en plan est de 3 m, en hauteur de 5 m. La précision de la détermination de la vitesse est de 0,05 m/s. Le taux de transmission des informations de navigation est de cinq fois par seconde. Le récepteur émet une impulsion d'horodatage (1PPS - une impulsion par seconde) avec une précision de 50 ns par rapport à l'échelle de temps GPS.
La sensibilité du récepteur en mode détection est de -170 dBW ; en mode suivi -180 dBW. Exigences de l'antenne : active, avec gain supplémentaire de 10...35 dB.
Alimentation 3,3 V ±5 % ; la consommation d'énergie en mode suivi est de 500 mW, en mode veille (alimenté par une batterie) de 20...30 μW.
Canaux d'échange de données : un canal USB 2.0, deux canaux RS-232 duplex (niveaux de signal LVTTL) avec une vitesse de transmission définie par logiciel de 4 800...203 400 bps. En fonction des canaux d'échange utilisés (deux canaux RS-232 ou un canal RS-232 + USB) et de la conception de l'alimentation par batterie (installée sur la carte ou externe), quatre options de conception sont possibles, désignées dans l'ordre comme la suffixe « xx » dans le nom GeoS-1xx. Les dimensions hors tout du produit sont de 47x35x9 mm.
Une photographie du récepteur Geos-1m est présentée sur la Fig. 5.

Riz. 5. Récepteur combiné GLONASS/GPS GeoS-1m
Contrairement au GeoS-1, qui est installé de manière autonome dans l'équipement utilisateur et connecté aux cartes utilisateur par des câbles, le récepteur GeoS-1m est un module monté en surface. Le module est directement soudé sur le circuit imprimé personnalisé en un seul cycle d'installation. Les dimensions globales du GeoS-1m sont de 35x35x3 mm (soit 47 % plus petites que celles du GeoS-1). Première option d'exécution : deux canaux RS-232 et une source de batterie externe. La consommation électrique, par rapport à GeoS-1, est également réduite et s'élève à 350 mW en mode suivi.
Les caractéristiques techniques du module et sa structure (hormis l'absence de port USB) sont similaires à celles données pour GeoS-1.
Les deux récepteurs sont des produits civils. La haute sensibilité du récepteur et la rapidité de détermination des coordonnées, combinées à de petites dimensions et une faible consommation d'énergie, garantissent leur utilisation réussie dans les équipements embarqués divers systèmes suivi des transports.
Protocoles de délivrance d'informations de navigation
Les récepteurs offrent deux manières d'échanger des informations de navigation : le protocole symbolique NMEA 0183 v.3.01 et son propre protocole d'échange binaire. Les données des deux protocoles sont émises simultanément par le récepteur, mais chacun via son propre canal. Par défaut, le canal n° 0 produit des données de protocole binaire, le canal n° 1 - NMEA. À l'aide de la commande de protocole binaire appropriée, il est possible de réaffecter les protocoles d'information à d'autres canaux de communication, c'est-à-dire que le protocole binaire sera émis sur le canal n°1 et NMEA sur le canal n°0. Le canal USB ne peut transmettre que les données d'un des protocoles.
Le protocole NMEA (National Marine Electronics Association) – nom complet « NMEA 0183 » – est un protocole symbolique de communication entre équipements de navigation. Il est utilisé dans presque tous les récepteurs GPS en raison de sa simplicité. Le récepteur disposant d'une interface série RS-232, vous pouvez « communiquer » avec lui en le connectant, par exemple, à un ordinateur compatible IBM PC (en s'accordant bien sûr sur les niveaux de signal, la vitesse de transmission et le format d'envoi). Le format des données étant basé sur des caractères, l'utilisateur peut visualiser et « déchiffrer » les messages (avec une certaine habileté) à l'aide de n'importe quel programme de terminal (dans le cas le plus simple, le programme « HyperTerminal » inclus dans le système d'exploitation Windows), sans développer de logiciel spécial. logiciel.
Le protocole NMEA ne permet pas d'envoyer des requêtes au récepteur. Le récepteur génère automatiquement un ensemble spécifique de messages fournis par le logiciel intégré. Format de paquet du récepteur GeoS-1 et leur description détaillée sont données dans le document « GeoS-1. Manuel d'utilisation.
Propre protocole binaire. En règle générale, le fabricant de récepteurs de navigation, en plus du protocole NMEA, propose son propre protocole qui fournit :
- Possibilité de configurer les modes de fonctionnement du récepteur ;
- Recevoir des informations de navigation étendues (par rapport à NMEA) ;
- Recevoir des informations en réponse aux demandes envoyées au destinataire.
Le format de transmission, comme déjà indiqué, est binaire (c'est-à-dire binaire) - la valeur d'un paramètre spécifique n'est pas transmise sous forme de codes ASCI, mais sous la forme nombre binaire; formats en termes de langage C (byte, short, int, float, double et autres), sélectionnés en fonction de la profondeur de bits et de la méthode de présentation des données. Ainsi, il est possible de visualiser des messages sur un ordinateur, mais les programmes de terminal les plus simples ne conviennent pas - pour le « décryptage », il est nécessaire d'utiliser des programmes spéciaux.
Des informations supplémentaires peuvent inclure des messages d'almanach, des messages éphémérides, des informations de mesure provenant de satellites, des données de position en coordonnées géographiques (latitude, longitude, altitude) et géocentriques (distances X, Y, Z du centre du géoïde). Des réglages fins du récepteur sont possibles (par exemple, éteindre et allumer un satellite spécifique en fonction de la position) et d'autres fonctions.
En général, le protocole contient un certain nombre de paquets de messages non sollicités (c'est-à-dire des messages envoyés automatiquement par le récepteur au fur et à mesure de leur génération), des paquets de paramètres, des demandes et des commandes reçues par le récepteur du contrôleur et des réponses aux paramètres, demandes et commandes. commandes envoyées par le récepteur au contrôleur.
Une liste complète des packages de protocoles binaires, leur format et leur description sont également fournis.
Cartes de commutation et logiciel GeoSDemo
Pour démontrer le fonctionnement des récepteurs, des cartes de commutation ont été développées (respectivement GeoS-1 DemoKit et GeoS-M DemoKit, illustrées à la figure 6) et un logiciel pour ordinateur personnel GéoSDémo.

Riz. 6. Cartes de commutation GeoS-1 DemoKit et GeoS-M DemoKit
Le tableau de commutation remplit les fonctions suivantes :
- Formation d'une tension d'alimentation principale de 3,3 V à partir d'une tension continue d'entrée de 5...30 V ;
- Connexion d'une source de tension de secours externe (batterie) au récepteur (pour les versions avec batterie externe) et la possibilité de le désactiver (pour utiliser des versions avec une alimentation par batterie installée sur la carte) ;
- Conversion des niveaux de signal RS-232 standard en niveaux LVTTL et vice versa ;
- Connexion à Ports USB et ordinateur personnel RS-232 ;
- Commutation de la tension d'alimentation d'entrée de source externe ou via un connecteur USB ;
- Mise en mémoire tampon et sortie vers le connecteur RF du deuxième horodatage 1PPS ;
- Indication de la présence de tension 3,3V et de l'activité des ports RS-232.
La carte de commutation connecte le récepteur à un équipement externe (alimentation, ports USB/RS-232 de l'ordinateur).
Le logiciel GeoSDemo est un logiciel de démonstration pour les récepteurs GeoS-1 et GeoS-M.
Le programme vous permet de :
- Établissez une connexion automatique ou manuelle au récepteur via les ports série RS-232 et USB ;
- Afficher les informations de navigation de sortie du récepteur, y compris sous forme graphique ;
- Générer et envoyer des commandes, des demandes et des paramètres au récepteur ;
- Afficher les réponses du récepteur aux commandes, demandes et paramètres ;
- Enregistrer les informations de sortie dans des fichiers journaux ;
- Lire les fichiers journaux précédemment enregistrés ;
- Générer et enregistrer un protocole de fonctionnement du récepteur ;
- Mettez à jour le logiciel du récepteur ;
La figure 7 montre la fenêtre principale du programme GeoSDemo.
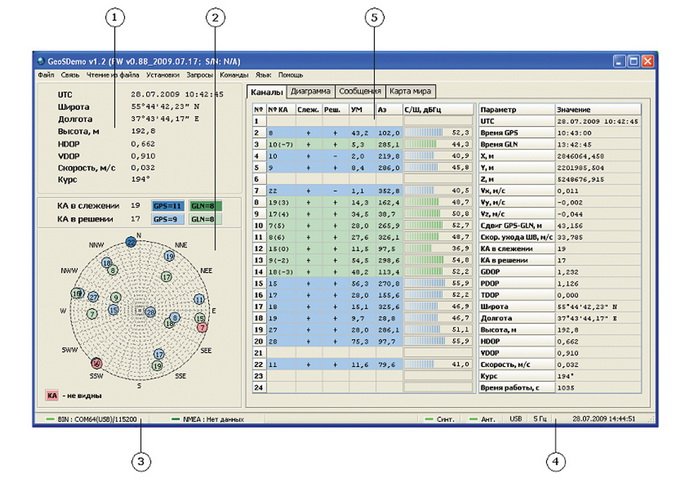
Riz. 7. Fenêtre principale du programme GeoSDemo
Le champ 1 contient des informations sur la date et l'heure, coordonnées géographiques et hauteur, valeurs du facteur géométrique DOP dans le plan et en hauteur, vitesse et cap du porteur.
Le champ 2 contient une carte des positions des satellites, ainsi que des informations sur Satellite GPS et GLONASS, suivi par le récepteur (« SC en tracking ») et participant au calcul (« SC en décision »). La carte affiche également les satellites dont l'angle d'élévation est inférieur au minimum.
Dans le champ 3 de la fenêtre principale se trouve une ligne d'état, sur le côté gauche de laquelle sont affichés l'état de connexion et les paramètres des ports COM du PC (nombre et débit en bauds) configurés pour recevoir des données binaires et du protocole NMEA. L'inscription « USB » à droite du numéro du port COM signifie que la connexion s'effectue via un port COM virtuel, créé par le pilote USB.
Le champ 4 affiche la date et l'heure du système de l'ordinateur en fonction des paramètres régionaux et de l'état de télémétrie matérielle du récepteur. Indicateur "Syn." affiche l'état de télémétrie du synthétiseur de fréquence du récepteur et l'indicateur « Ant ». - état de télémétrie de la tension d'alimentation de l'antenne.
Dans le champ 5 de la fenêtre principale se trouve un panneau contenant un ensemble de quatre onglets : « Chaînes », « Diagramme », « Messages » et « Carte du monde ».
Plus informations détaillées sur le programme, ainsi que les procédures de sauvegarde et de chargement des almanachs, des éphémérides, de la configuration et de la sauvegarde paramètres du logiciel dans la mémoire Flash du récepteur sont indiqués dans les documents.
Conclusion
À l'heure actuelle, GLONASS se rapproche d'un état qui lui permettra d'être considéré comme un système de navigation à part entière, capable de remplir les fonctions déclarées même sans le support des satellites d'autres systèmes de navigation.
Le lancement prévu en 2010 de la troisième génération de satellites Glonass-K, dont la durée de vie annoncée est de 10 ans, est particulièrement intéressant. L'apparition de signaux de la troisième bande L3 fera plus que doubler la précision de la détermination de la localisation. Et enfin, la plus petite masse du satellite lui-même permettra de le lancer depuis le cosmodrome de Plesetsk (et non depuis Baïkonour, comme c'était le cas auparavant) avec un étage supérieur et un lanceur différents, ce qui réduira le coût de lancement. en orbite d'environ la moitié.
Littérature
- Soloviev Yu.A. Systèmes de navigation par satellite. - M. : Eco-Tendances, 2000.
- Système mondial de radionavigation par satellite GLONASS. Éd. V.N. Kharisova, A.I. Perov, V.A. Boldin. - M. : IPRZHR, 1988.
- Iatsenkov V.S. Bases de la navigation par satellite. Systèmes GPS NAVSTAR et GLONASS. - M. : Ligne d'assistance- Télécom, 2005.
- Article « Lancements de GLONASS » sur le site
http://ru.wikipedia.org/. - Samkova E. Revue du marché des appareils de navigation // Systèmes embarqués, n°3, 2009.
- Programme cible fédéral « Global Navigation System » du 20 août 2001// Page Internet
http://www.aggf.ru/proekt/zakon/doc.php?zakID=2. - Décret du gouvernement de la Fédération de Russie du 25 août 2008 « Sur l'équipement des moyens et systèmes de transport, techniques et systèmes de navigation par satellite GLONASS ou GLONASS/GPS »// Page Internet
http://www.aggf.ru/proekt/zakon/doc.php?zakID=6. - GéoS-1. Manuel d'utilisation. Version 1.1. // document de la société GeoStar Navigation
http://www.geostar-navigation.com/fail/manuals/User_Manual_GeoS-1_rus.pdf. - GéoSDémo. Guide de l'utilisateur. Version 1.2. // document de la société GeoStar Navigation
http://www.geostar-navigation.com/fail/geosdemo/User_Manual_GeoSDemo_1_2_rus.pdf.